单车场景下城市交叉口的智能驾驶车辆左转决策研究
2021-02-24 07:09陈雪梅欧洋佳欣王子嘉李梦溪
汽车工程学报 2021年1期
陈雪梅,欧洋佳欣,王子嘉,李梦溪
(北京理工大学 机械与车辆学院,北京 100081)
智能驾驶对于保证道路通行效率和通行安全具有重要的作用。复杂动态城市环境下,尤其是城市交叉口,智能车辆的行为决策研究是制约其真实道路行驶的关键因素之一,因此,加强城市交叉口通行决策研究具有重要的现实意义和学术价值。
复杂动态时变交通环境下,智能驾驶车辆的决策与交通参与者的运动状态密切相关。很多学者基于预测-决策框架开展了智能行为决策研究。LI Junxiang 等[1]结合车辆状态、道路结构及车间交互等特征属性,提出了基于动态贝叶斯网络(DBN)的换道行为预测模型,并在公开数据集上进行了验证。MÄNTTÄRI 等[2]提出了一种基于深度学习的换道行为预测方法。该方法将车辆在高速公路上的换道场景数据转化Recurrent Convolutional Neural Netw 为特定格式的俯视视角图片,输入到循环神经网络(RCNN,ork)中进行训练,在不需要显性地建立车辆交互关系的情况下获得了较为精准的预测模型。LEFÈVRE 等[3]通过分析与本车存在潜在冲突的车辆的驾驶意图(Intention)和它们被期望的(Expectation)驾驶动作间的差异,结合交叉口结构形式设置不同级别的风险预警,为无人驾驶车辆的策略选择提供参考。CHEN Xuemei 等[4]利用间隙可接受理论和换道决策规则构建了自由换道决策模型。CHEN Xuemei 等[5]采用RSAN(Rought-Set Artificial Neural Network)对跟车场景下的决策进行研究。但是以上研究没有针对复杂动态的城市交叉口中的车辆运动不确定性对智能车辆行为决策影响机理以及穿越行为过程进行分析。
本文利用车载传感器和摄像法对典型城市交叉口交通进行数据采集,并对车辆运动模式进行识别。然后基于高斯过程回归模型对车辆进行建模和长时预测。最终建立了基于冲突消解理论的左转决策模型并验证了该模型的有效性。
1 基于高斯过程回归模型的轨迹预测
1.1 城市交叉口左转冲突分析
本文将智能车辆城市交叉口穿越通行全过程划分为3 个阶段,分别为穿越直行机动车车流、穿越非机动车流以及穿越横穿马路的行人。将左转车与其他移动目标在路径上的重合区域设为冲突区域,如图1a 中橙色区域所示。
为了保证通行安全,避免车辆碰撞,左转车辆与对向的直行车应该交错通过冲突区域。决策系统框架如图1b 所示。由于篇幅所限,本文重点阐述左转车如何穿越对向直行车,其他情况在他文另做阐述。
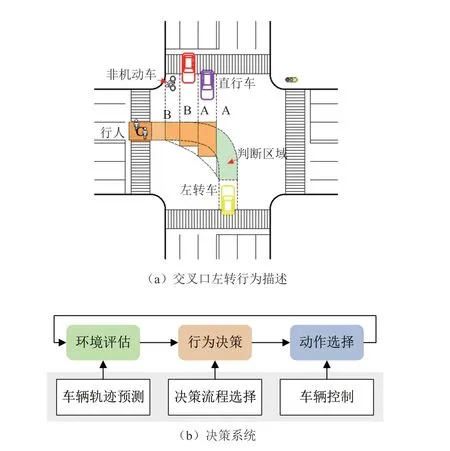
图1 交叉口行为及决策系统
1.2 数据采集与预处理
本文采用车载传感器和摄像法获取智能车辆左转通行城市交叉口(北京市海淀区魏公村路口)的行为数据以及周边车辆和环境信息,并且使用对称指数移动平均法(sEMA)来进行数据预处理。预处理数据如图2 所示,部分原始标定数据见表1 和表2。
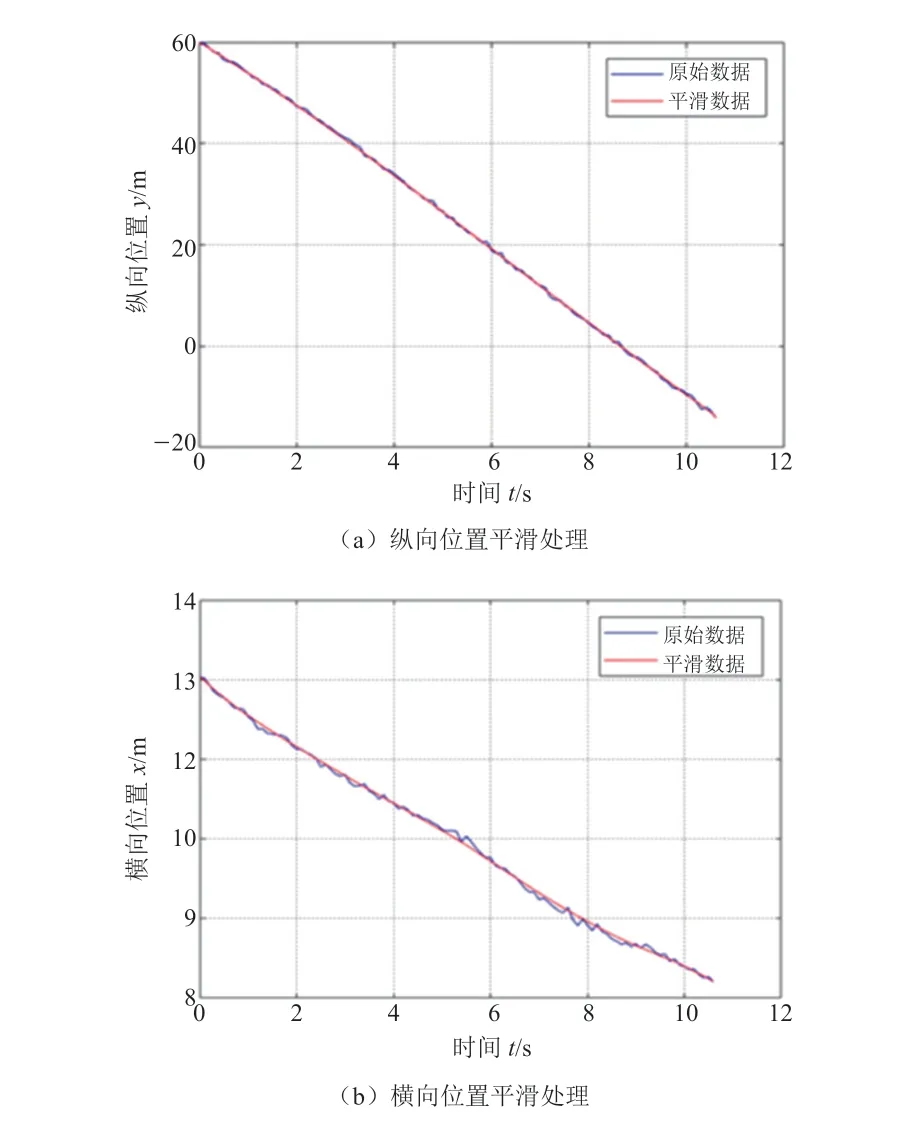

图2 数据预处理
1.3 基于高斯过程回归模型的预测方法
高斯过程回归(Gaussian Process Regression,GPR)[7]是近年发展起来的一种机器学习回归方法,在处理高维数、小样本、非线性等复杂的问题上具有很好的适应性,且泛化能力强。本文利用高斯过程模型重点对对向直行车的运动轨迹进行长时精准预测分析。
一般带噪声的预测模型可以定义为:y=f(x)+ε,其中,x为输入向量;y为观测值;ε是均值为0,方差为的高斯白噪声;f为未知的函数关系。协方差函数为:

可以把观测值y以及预测值看成一个从联合高斯分布采样来的一个点,则观测值和预测值的联合先验分布为:
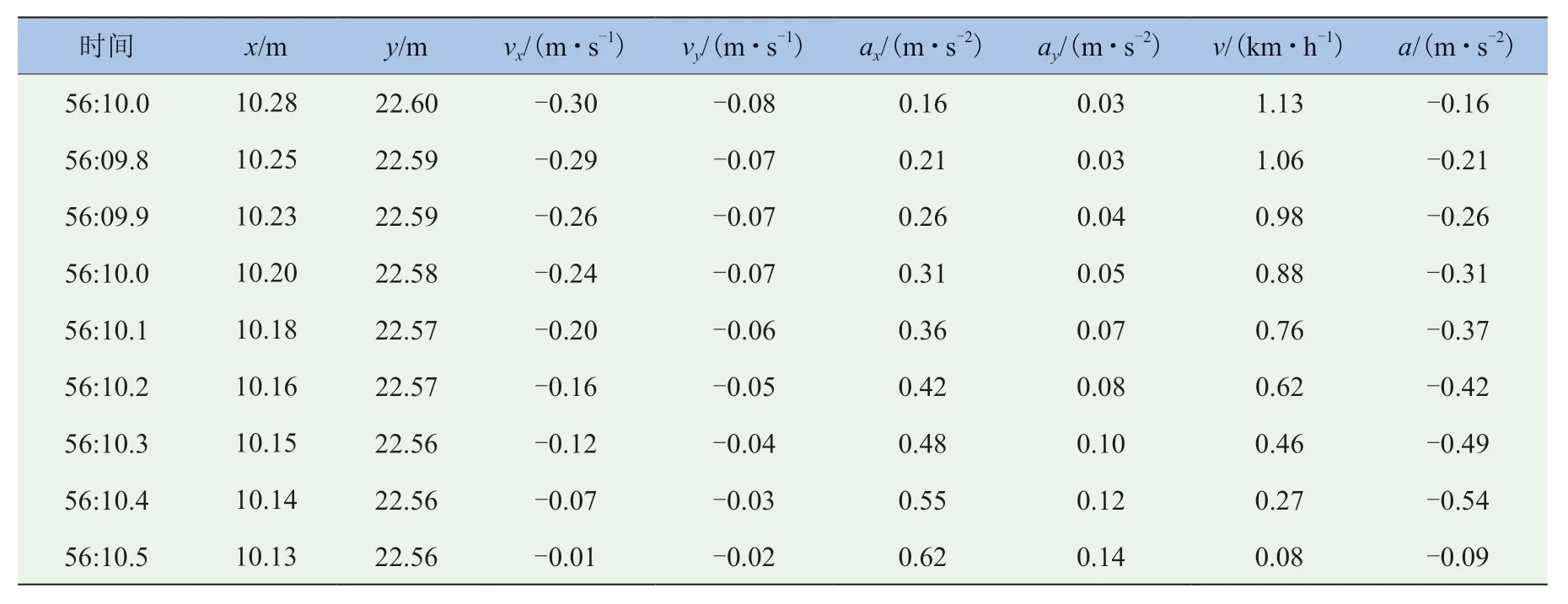
表1 交叉口部分左转车辆数据

表2 交叉口部分直行车辆数据

式中:X为训练集;X*为测试集;K为数据集之间的协方差;In为单位矩阵。
由此计算预测值f*在观测值下的条件分布,即f*的后验分布:

建模过程如下:首先将轨迹数据划分为测试集和训练集;其次选取合适的核函数并设置超参数的初始值,从而确定GPR 的先验模型;然后通过训练集训练模型,优化超参数;最后将测试集的车辆运动状态参数输入训练好的GPR 模型中,得到预测值及其预测分布估计,如图3 所示。本文利用路基平台采集的轨迹数据训练高斯过程回归模型并优化其超参数,将x和y方向的加速度预测解耦,减少了模型计算的复杂度。在x方向上,使用目标的位置和速度[x(t),y(t),vx(t),vy(t)]作为预测模型的输入,模型的预测值是目标x方向上的加速度ax(t);在y方向上使用[x(t),y(t),vx(t),vy(t)]作为车预测模型的输入,模型的预测值是目标y方向上的加速度ay(t)。通过GPR 算法建立加速度与车辆当前位置和速度的映射关系,训练得到的GPR 加速度预测模型如图4 所示。
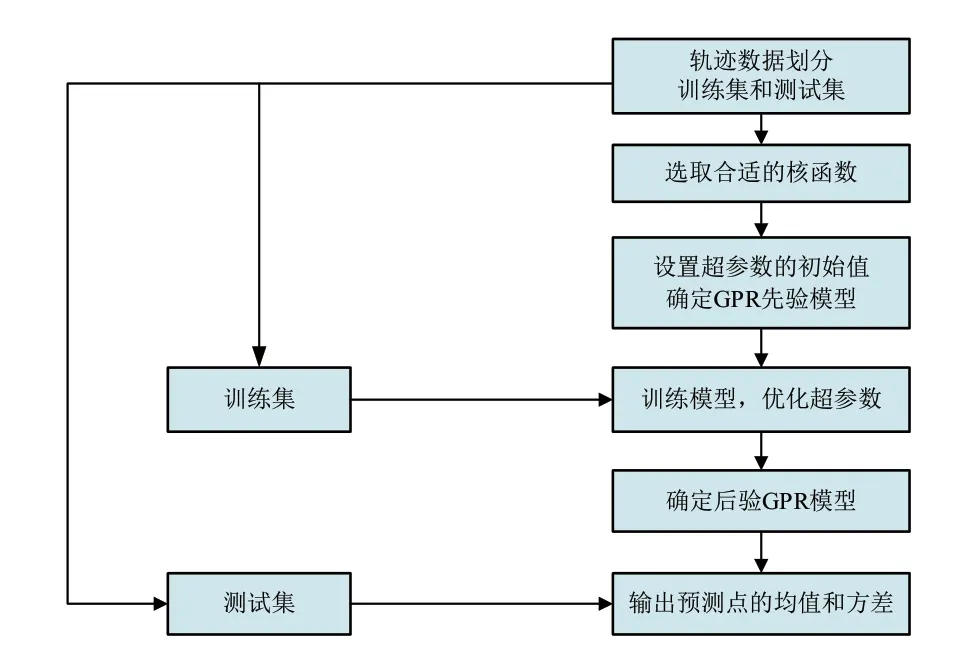
图3 高斯过程回归模型训练过程

图4 GPR 加速度预测模型
2 基于冲突消解的左转决策建模
通过视频数据分析可以得出,智能车辆左转通过城市交叉口冲突区域可能遇到的情况包括:
(1)当t20≤t10≤t21时,直行车先进入冲突区域,在其离开冲突区域前左转车进入,会发生碰撞。
(2)当t10≤t20≤t11时,左转车先进入冲突区域,在其离开冲突区域前直行车进入,会发生碰撞。
(3)当t21≤t10时,直行车先通过冲突区域,在其离开冲突区域后左转车进入。
(4)当t11≤t20≤t21时,左转车先通过冲突区域,在其离开冲突区域后直行车进入。
上面列举的安全通行方式可按图5b 中的时间轴方式表示,其中橙色矩形表示车辆占用冲突区域的时间段。
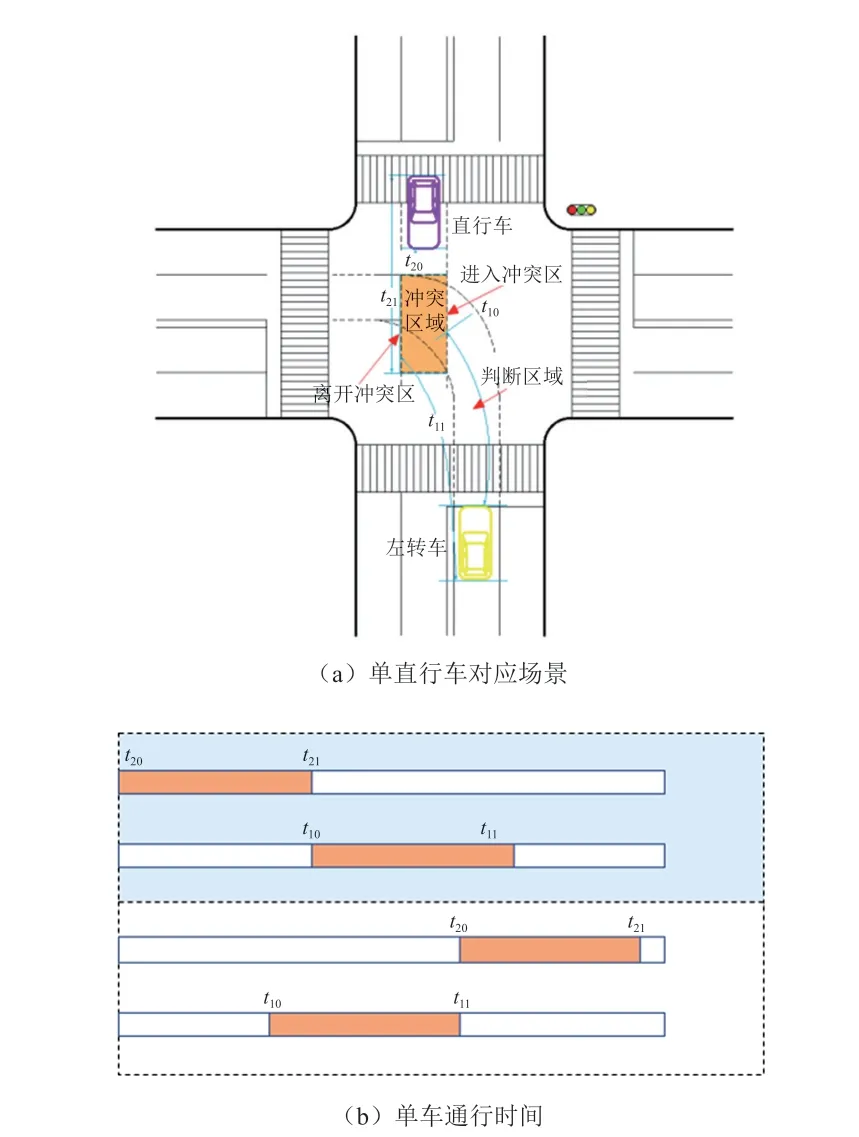
图5 单车场景下左转通行模型
2.1 智能车辆左转决策流程
智能驾驶车辆在进入路口时,对直行车辆的轨迹进行了预测,得到了其通过冲突区域的时间区间。若二者可能会在冲突区域相遇,左转车则需要选择合适的速度,控制车辆在时间上避开直行车辆。
本文将智能驾驶车辆的动作空间离散化,设置多个待选动作值,决策算法输出的是车辆的速度期望值。在考虑了决策合理性和算法效率后,设置了如下动作空间,其中包含了多组加速动作和减速动作:

在实际仿真应用过程中,车辆速度由PID 模块控制,根据当前车速和输入的期望车速生成加速和减速的动作量。
综合考虑动作选取及高效性、舒适性等因素,得到单车场景下的决策流程,如图6 所示。
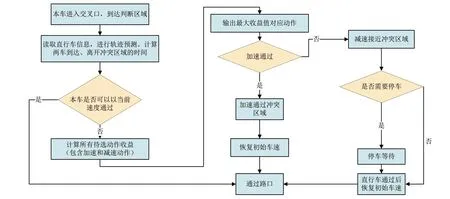
图6 单车场景下的动作选择流程
2.2 动作选择标准
在实际道路环境中,驾驶动作的选择需要考虑驾驶安全性、通行高效性等因素,以提高决策过程的合理性。
2.2.1 安全性
通过检测车辆之间是否发生碰撞而定义。以直行车和左转车通过冲突区域的时间差值为参考指标,当时间差值大于0 时,车辆安全通行如式(7)所示。

2.2.2 高效性
表征车辆通过城市交叉口的效率,以左转车从进入交叉口到离开冲突区域的驾驶总用时为参考指标,如式(8)所示。

式中:twait为减速让行的总用时(包括停车等待时间);tpass为直行车通过后,左转车通过冲突区域的时间。在保证安全性条件的基础上,需要选择总用时尽可能短的动作,才能保证通行过程的高效性,即:

式中:Taction为T1、T2中用时更少的值,以表明选择此用时代表的是更为高效的动作来执行。
3 仿真试验及结果分析
本文基于Prescan & Matlab/Simulink 进行了联合仿真试验设计。仿真参数设置如下:左转车辆与直行车辆的长度分别为4.79 m 和5.2 m;仿真步长为0.05 s。下面将对仿真场景和真实场景的验证结果进行分析。
3.1 仿真场景
场景一:左转车采取让行策略。
当左转车不由算法控制时两车发生碰撞。由图7可知,当仿真时间t=5.8 s 时,系统检测到碰撞信号。
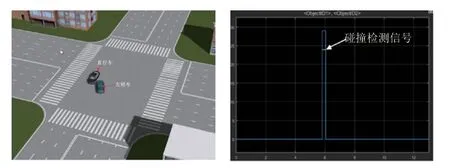
图7 碰撞检测信号
当左转车由算法控制时,其整个通行过程如下:左转车驶入路口后,先基于直行车当前的运动状态对其未来轨迹做出预测,如图8a 所示;再将预测的轨迹传入决策算法,动作选择算法根据多因素影响下的目标函数选择最优动作,输出期望速度,从而决定本车优先通过或让行。在本场景中,当左转车进入路口时,直行车已十分接近冲突区域,在此情况下,算法得出让行结论,左转车减速让行,直行车优先通过。算法给出的期望速度信号及实际车速变化如图8b 所示。仿真开始时,左转车以5 m/s 的期望速度行驶,在驶入路口得出让行决策后,将速度调整为1 m/s,减速让行,并在直行车离开冲突区域后恢复原始期望速度5 m/s。
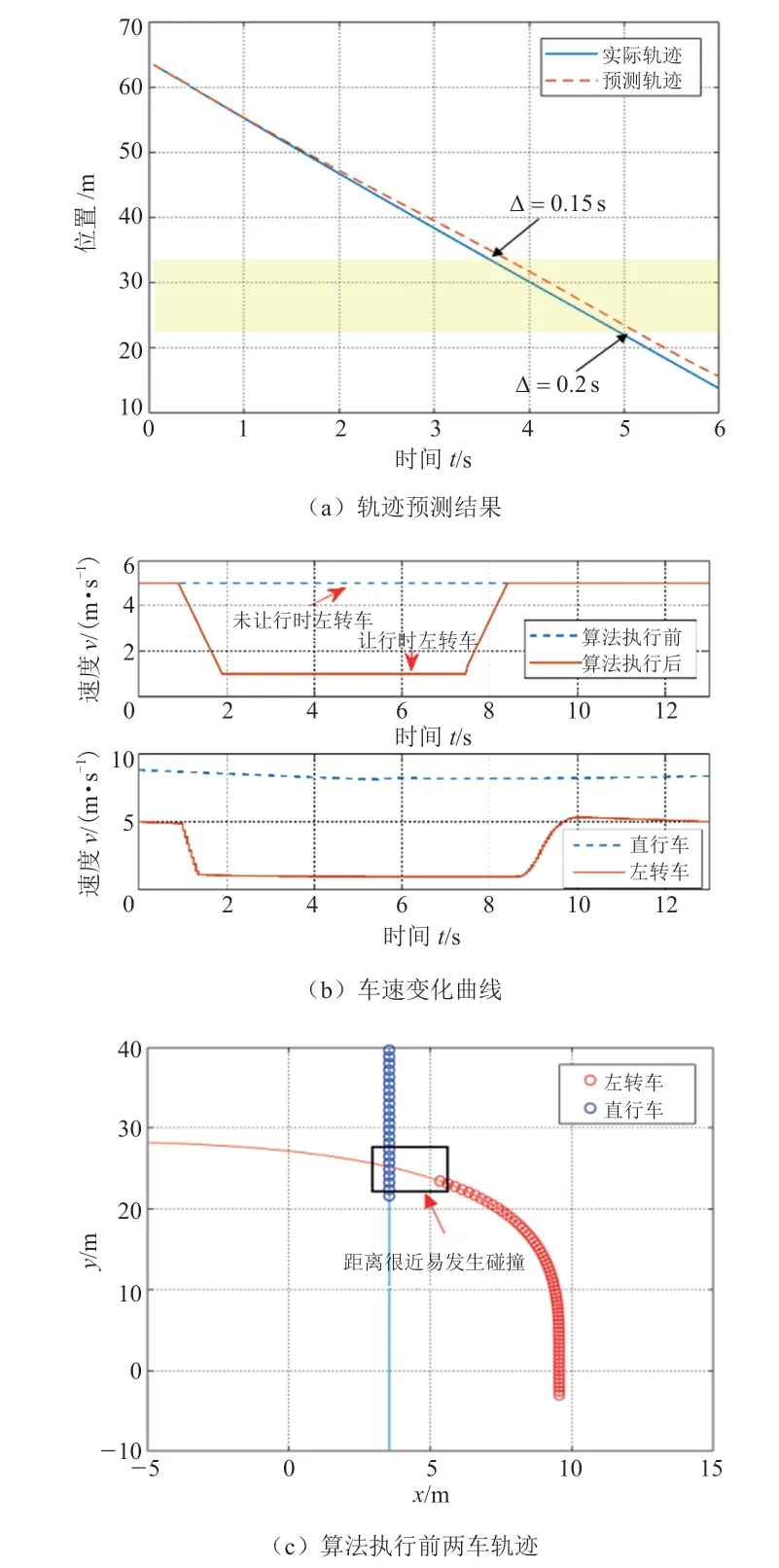

图8 仿真结果分析
场景二:左转车采取加速通过冲突区域的策略。
当左转车到达判断区域时,直行车刚刚进入交叉口,距离冲突区域相对较远。在此情况下,决策算法倾向于让左转车加速优先通过冲突区域。左转车在驶入路口后,将期望速度调整为7 m/s;当其完全通过冲突区域后,期望速度又恢复到5 m/s,如图9b 所示。
尽管在加入决策算法前,左转车、直行车先后通过交叉口,没有发生碰撞。但在加入决策算法后,智能驾驶车辆选择加速通过冲突区域,增大了两车距离,如图9c 和9d 所示。这样的通行方法在实际道路上不但可以提高左转车的通行效率,同时减小了对直行车流的影响,如图9c 和9d 所示。


图9 仿真结果分析
本文共设计了30 次仿真试验来对提出的决策模型的合理性和适应能力进行验证,其中成功穿行28 次,成功率93%。
3.2 真实场景
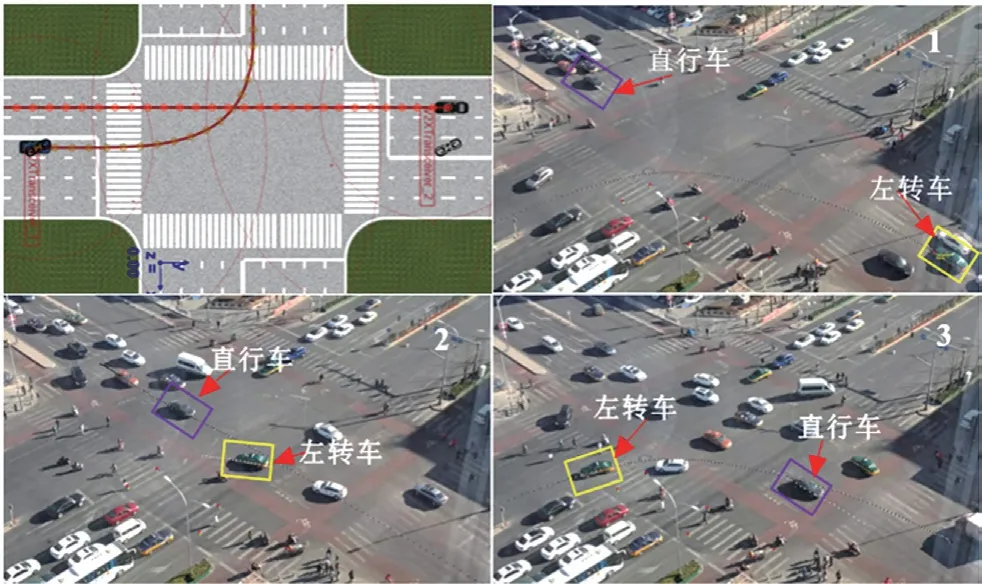
图10 真实场景
在左转车优先通过的场景下,其车速变化主要分为以下3 个阶段,进入路口的稳定行驶阶段,动作选择后的加速通过阶段,以及通过冲突区域后的速度恢复阶段,如图11 所示。图中实际车速曲线在9 s 后逐渐上升,主要是因为驾驶员在判断路口处没有行人及非机动车影响后,提前加速到了车道内行驶的期望速度。
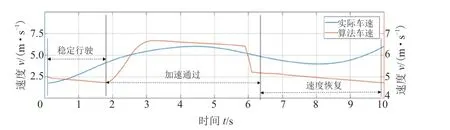
图11 车速对比
图12 反映了车辆在不同时刻的位置与速度信息。由图可知,算法得出的数据与真实数据在整体变化趋势上非常接近。

图12 时空轨迹对比
4 结论
本文针对单车场景下智能驾驶车辆在城市交叉口的左转行为决策问题,利用高斯过程模型对对向直行车进行轨迹预测,并基于冲突消解理论建立左转决策模型,得出以下结论:
(1)根据城市交叉口通行车辆的5 种运动模式分类,利用高斯过程模型对对向直行车进行长时轨迹预测,最终获得了具有较高精度的长时预测轨迹,与实际情况十分接近。
(2)将左转车穿越交叉口的行为分为3 个阶段,分别是穿越机动车、非机动车及行人。主要针对单辆对向直行车的情况考虑了冲突消解,进行了速度控制策略的研究,设计了左转决策流程和基于安全性、高效性等因素的动作选择标准。
(3)利用仿真验证平台对提出的算法的可靠性和有效性进行验证。结果表明,30 次仿真试验中左转车成功穿越交叉口28 次,成功率93%,即该决策算法能够引导智能驾驶车辆顺利完成驾驶任务,能够在一定程度上提高驾驶安全性和通行效率。
由于本文篇幅限制,不同时段的交通流密度对驾驶行为的影响、本车对对向车辆行为决策的影响,行人及非机动车等交通参与者对本车行为决策的影响分析和建模将在另外的文章中进行阐述。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
物流科技(2022年2期)2022-05-07
汽车实用技术(2022年7期)2022-04-20
建材发展导向(2021年19期)2021-12-06
小天使·四年级语数英综合(2021年3期)2021-05-10
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
科学家(2021年24期)2021-04-25
江苏广播电视报·少儿文学(2019年10期)2019-09-10
汽车与安全(2018年2期)2018-05-14