空间碎片激光移除: 从概念设计到技术与系统实践
2021-01-15 06:49陈川宋光明杨武霖武强张品亮曹燕龚自正
空间碎片研究 2020年4期
陈川, 宋光明, 杨武霖, 武强, 张品亮, 曹燕, 龚自正
(北京卫星环境工程研究所, 北京100094)
1 前言
空间碎片是地球轨道上在轨运行或再入大气层的无功能的人造物体及其残块和组件。 随着航天活动的日益频繁, 空间碎片的数量迅速增加,已经对人类空间资产安全构成了严重的现实威胁, 是全世界面临的重大挑战。 开展空间碎片主动移除已经成为国际社会的共识。 在众多空间碎片移除技术中, 天基激光烧蚀驱动是一种高效的、 有广阔应用前景的移除技术, 特别是针对移除海量的、 尺寸在1 ~10cm 的危险碎片而言, 更是具有独特优势, 因而是国内外移除技术研究的热点之一。
根据激光的不同作用参数及所希望达成的不同效果, 激光移除空间碎片可分为光压驱动[1]、烧蚀破碎[2]、 烧蚀驱动三种方式[3,4]。 光压驱动能量转换效率低, 作用速度慢, 且易受宇宙环境和太阳光的影响。 烧蚀破碎能量消耗高, 且碎片依旧留存在太空中, 不仅不能从根本上解决空间碎片问题, 还会增加碎片数量, 加剧空间碎片环境恶化。
激光烧蚀驱动技术[3-5]是使用强激光束照射碎片表面, 使辐照区材料产生熔融、 汽化、 电离, 形成等离子体反喷羽流, 反喷羽流的冲量耦合使碎片获得反向速度增量, 从而驱动碎片运动, 改变碎片初始轨道, 如图1 所示。 该方案能量转换效率是光压方式的4 ~5 倍[3], 所需能量比烧蚀破碎模式小一个数量级[5], 移除碎片效率高, 作用距离远, 且对米级以上大碎片和厘米级小碎片都有很好的移除效果, 在所有主动移除空间碎片的方案中, 单个碎片清理成本最低。 同时, 既能作为在轨航天器的主动防御手段又可对整个空间碎片环境进行有效清理, 是当下激光移除空间碎片的主流方案。
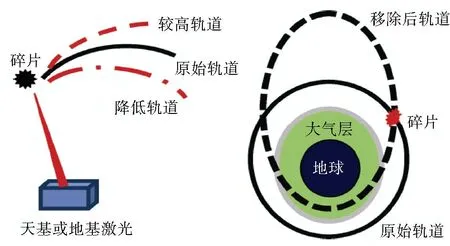
图1 激光移除空间碎片原理示意图ig.1 Schematic diagram of laser removal of space debris
本文梳理了激光驱动移除空间碎片技术从提出至今, 天基地基方案交替发展的历程, 介绍了其国内外发展现状。 围绕激光器、 探测跟瞄系统、 天基平台和移除策略分析了该技术工程化应用存在的问题。 最后, 围绕存在的问题介绍了当前该技术的发展趋势。
2 发展历程
通过激光烧蚀反喷来移除空间碎片的最初灵感来源于激光推进技术[6,7]。 根据激光平台的不同可分为地基和天基两种, 整个方案的发展是一个天基和地基不断交替提出, 互相参照演进论证的过程。 在概念出现的最初阶段, 各国提出的技术方案都是基于天基平台。
1989 年, 美国洛斯阿拉莫斯国家实验室的John DMetzger 在激光武器的研究发展和激光作用物质冲量耦合系数的实验测量的基础上, 提出最早的天基激光移除空间碎片系统概念[8]。 1990年, 德国航天研究中心的Schall 计算验证了用激光改变直径10cm 碎片以避免撞击或移除离轨的可行性, 并提出了用一个包含探测、 跟踪和激光驱动完整功能, 能够独立执行LEO 轨道小尺寸碎片探测移除任务的天基方案概念[9], 后续进一步将功能拓展到了为国际空间站等大型高价值航天器提供碎片撞击主动防御[10]。 1994年, 日本神户大学的Mengu Cho 提出了一个探测跟踪、 瞄准和激光发射同光路的天基空间碎片移除系统方案, 如图2 所示, 大大缩小了系统尺寸规模[11]。
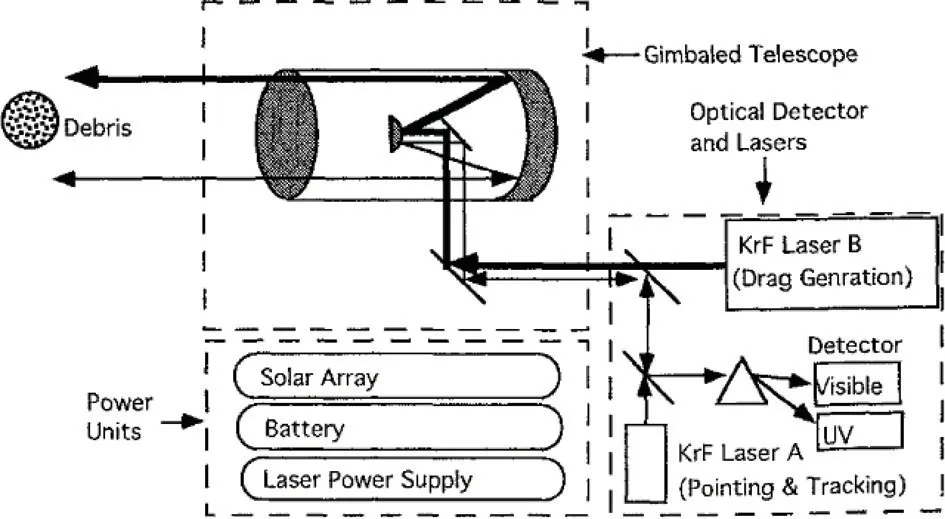
图2 神户大学天基激光移除碎片方案图Fig.2 Schematic diagram of debris-removal laser satellite of Kobe University
虽然基于天基平台的激光移除碎片系统的提出早于地基系统, 但是由于当时不论是天基激光器、 探测载荷还是天基平台的技术水平都远远达不到要求, 天基系统往往都只能停步于理论论证阶段, 无法向工程化进一步推进。 相对于天基平台, 地基平台不受尺寸重量的限制, 没有发射成本, 功耗几乎不受限制, 且可以直接借用天文望远镜、 太空监视雷达等现有地基探测跟踪设备。在激光器设计上也可参考已有或正在建设的大型地基激光器, 因而参数计算设计和工程化尝试有着明确可行的参照目标。 因此, 在天基激光移除空间碎片概念出现后不久, 大型地基空间碎片激光移除系统成为了各国研究论证的主流。
1993—1994 年, 美国D.Monroe[12]、 Phipps[13]等人都对不同的地基方案开展了设计论证。 1996 年,由NASA 先进概念办公室提议, 马歇尔航天飞行中心牵头, 包括美国空军菲利普实验室、 麻省理工学院林肯实验室等众多尖端科研机构参与, 开展了一项旨在全面验证地基空间碎片移除系统可行性的ORION 计划[14-17]。 该计划从碎片环境开始, 依次论证分析了激光与物质相互作用、 激光的大气传输、 激光器的选择、 探测跟踪设备的选择、 系统耗资、 政治风险等所有可能相关的方面。 ORION 计划针对的目标是200 ~1500km 以内所有1 ~10cm 的空间碎片, 以保护400km 轨道上的国际空间站为第一阶段目标, 并最终扩展到对所有1500km 以下航天器的保障。 报告第一部分分析了目标范围空间碎片的空间分布情况及主要组成材料, 并制定了尽最大可能清理所有过顶碎片(过顶即清除) 和先低轨后高轨按顺序依次清理两种碎片的清除策略。 报告第二部分主要着眼于根据碎片在高能量激光作用下表现出来的特点, 特别是冲量耦合系数的变化规律对激光与物质相互作用问题进行了分析, 用于进一步论证ORION 计划中激光参数、 发射镜尺寸、 激光作用频率等参数。 报告第三部分分析了大气层对激光传输的影响, 包括直线传输假设下焦点处光斑衍射极限直径对激光波长和发射镜尺寸的关系、 大气层对激光的扭曲和吸收以及各种非线性效应对激光波长选择的限制。 报告第四部分根据前三部分的结论提出了对系统各部分的参数要求, 并据此对比分析了脉冲固体激光器(Nd:YAG 激光器)、 气体激光器(CO2气体激光器)、 连续波气体激光器(碘氧激光器) 三类激光器, 及微波雷达、 被动光学、 激光雷达、 分布式雷达四种探测手段的性能、 特点、 适用性、 可行性和可能花费等问题。 报告最后对整个系统的预算及政治风险进行了评估。 ORION 计划是迄今为止最全面最深入的对地基激光移除碎片系统的全面论证, 有很高参考价值。 后续, 美国在ORION 计划的基础上又进一步对地基探测跟踪系统进行了完善[3,18]。
地基系统由于要求作用距离远, 发射镜尺寸从几米到几十米不等, 所需激光功率也较大。 同时, 由于作用激光需要穿过大气层, 为了修正激光在大气层中的折射和最小化大气对激光传输的影响, 除了需要较复杂的自适应光学系统以外,激光波长还被限制在1.06μm 附近。 相同距离和发射镜尺寸下, 波长越长衍射光斑越大, 因此这一限制又反过来进一步提高了对激光器功率密度和发射镜尺寸的要求。 除此之外, 地基系统位置是固定的, 碎片探测跟踪和激光作用都局限于天顶范围, 严重制约了其在碎片移除和航天器碎片主动防护上的任务灵活性。 随着激光器小型化、 天基探测跟踪技术的成熟和天基平台太阳能电池技术水平的提高, 天基平台的可行性不断提高, 2010 年左右各国的研究重点都转移到了天基平台上。
2013 年美国的Phipps 在此前地基激光系统方案上进一步提出了可探测跟踪作用150km 范围内1cm 尺寸以上碎片的天基系统方案[18]。 俄罗斯科学院的V. V. Apollonov 从对LEO 轨道航天器进行空间碎片主动防护的角度分析计算了地基和天基激光移除碎片系统对激光器的功率要求[19], 结论显示天基系统的能量需求比地基低40%左右。
2014 年, 为尽可能减小平台规模, Phipps 提出了由独立的探测系统和跟瞄、 激光发射共光路系统组成的空间碎片探测跟踪移除一体化天基激光平台方案, 该系统采用Nd:YAG 激光器提供的56Hz、 355nm 波长紫外激光, 以降低对小发射镜尺寸和激光功率的需求[20,21]。 法国的Rémi Soulard等人基于国际相干放大网络计划(ICAN), 提出了一套天基跟踪移除一体化的光纤激光系统[22], 如图3 所示。 该系统由10000 根以上的1mJ 光纤激光器组成, 通过相干合成来提供所需的激光能量。 在此基础上, 2015 年日本和法国合作提出了利用国际空间站上用于探测超高能宇宙射线的JEM-EUSO 超宽视场望远镜和光纤激光器对厘米级碎片探测和激光移除技术进行在轨验证的方案, 如图4 所示[23]。
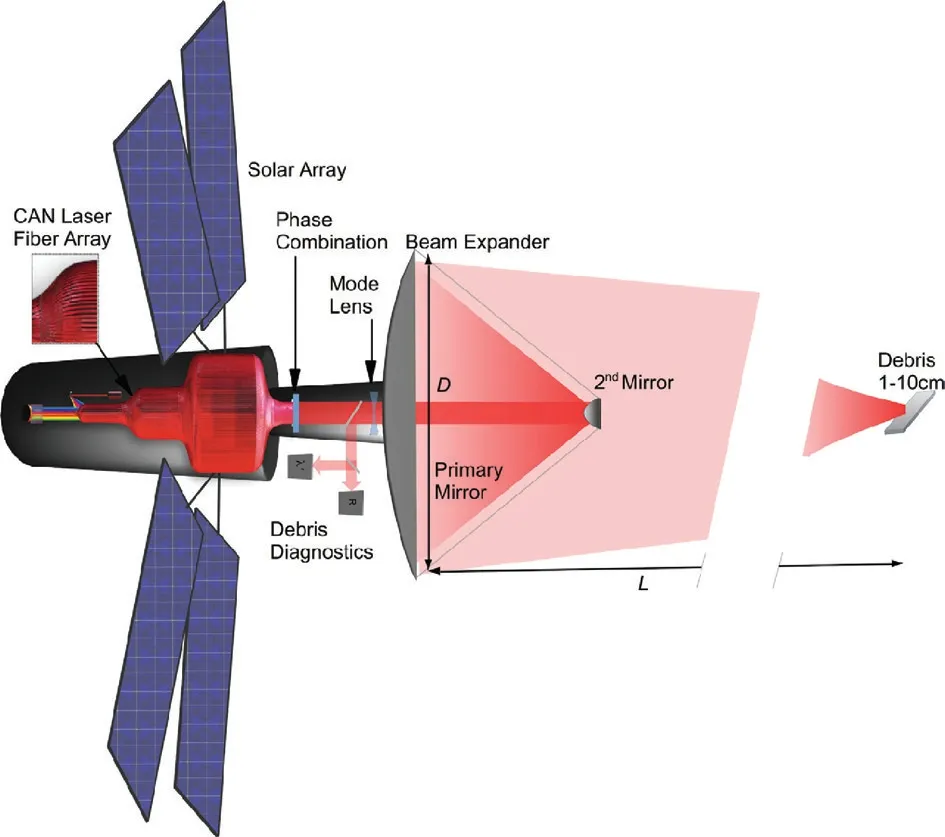
图3 天基光纤激光系统Fig.3 Space-based fiber optic laser system
2018 年美国的Phipps 提出了激光驱动大碎片交通管理(LDTM) 的概念, 如图5 所示, 即通过小能量天基激光器产生的有限速度增量来改变空间碎片轨道进而预防高概率撞击事件的方案, 从而遏制碎片增长[24]。 2019 年我国陈川、 龚自正等人提出了天基激光驱动接力移除低轨碎片方法, 即在单个天基激光平台驱动降轨效果不足以实现碎片移除的情况下, 通过分布在不同轨道高度的多个天基激光平台组成移除星座, 以接力移除的方式实现空间碎片移除,如图6 所示[25]。 这两个方案的思路都是在激光器能量难以满足已有方案需求情况下, 探索小脉冲能量天基激光驱动在碎片环境治理领域的应用。
3 发展现状
从1989 年至今, 各国以激光移除空间碎片为目标对系统总体方案进行了大量论证, 见表1。总体方案的核心内容主要由以下几项: 激光器系统、 探测跟踪系统、 平台、 移除策略等。 其中,探测跟瞄系统主要是负责目标碎片的发现和将激光能量准确投送到目标碎片上, 激光器系统是负责提供足够的激光能量以产生足够的速度改变量, 平台则负责能量供给和系统的基础工作环境, 移除策略负责具体如何移除的问题, 包括设计目标选择和激光驱动策略的移除策略确定以及具体移除策略的实现过程。
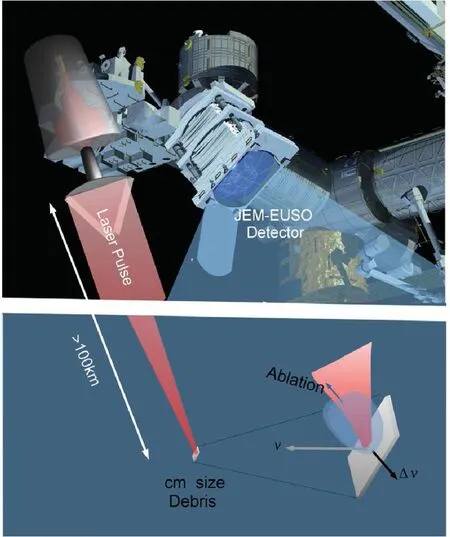
图4 利用JEM-EUSO 的在轨验证方案Fig.4 On-orbit demonstration using JEM-EUSO
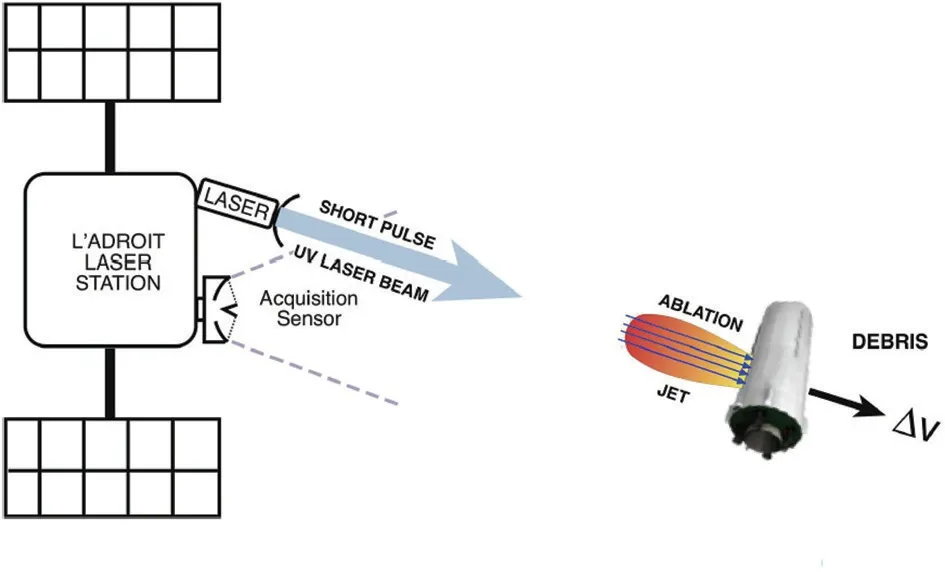
图5 LDTM 示意图Fig.5 Schematic diagram of LDTM
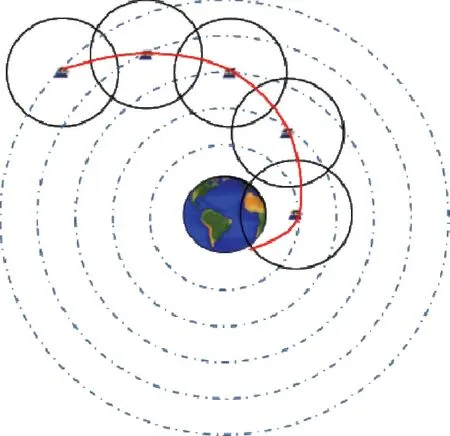
图6 激光接力移除空间碎片系统示意图Fig.6 Schematic diagram of laser removal of space debris by relay method
3.1 激光器
激光器是激光移除空间碎片系统中的核心分系统, 它的选择基本上决定了整套系统的性能指标。 激光移除碎片系统要求激光具有优秀的长距离传输特性, 高重复频率、 高脉冲能量、 短脉宽, 要求激光器高能量转换效率、 高功率/重量比、 高功率/体积比。 Nd:YAG 激光器因其高能量转换效率、 高重复率、 高能量密度, 成为目前天基脉冲激光系统的主流选择[26,27]。 但是目前该类激光器在天基平台上也仅有小脉冲能量系统用于激光测距和通信, 尚无大脉冲能量系统的应用。 地基高能量Nd:YAG 激光器用于天基碎片移除还有小型化、 天基平台适应性等一系列问题。此外, 最近几年光纤激光器也开始进入天基激光移除碎片系统的方案设计中。 光纤激光器具有高热量散发效率、 高功率/重量比的优点, 且可实现kHz 级的高重复率以及40%的高能量转换效率[28-30]。 但是目前光纤激光器的相干合束能力还仅仅停留在100 根光纤以下, 对于达到移除碎片能量需求的10000 根光纤指标还有很大距离[31,32]。
3.2 探测跟瞄系统
探测跟踪系统分为探测和跟踪两部分, 分别用于大视场远距离发现目标碎片和中距离持续跟踪及定轨。 当前天基探测手段分为三大类: 微波雷达、 被动光学(包括红外) 和主动光学(激光雷达或激光测距)。
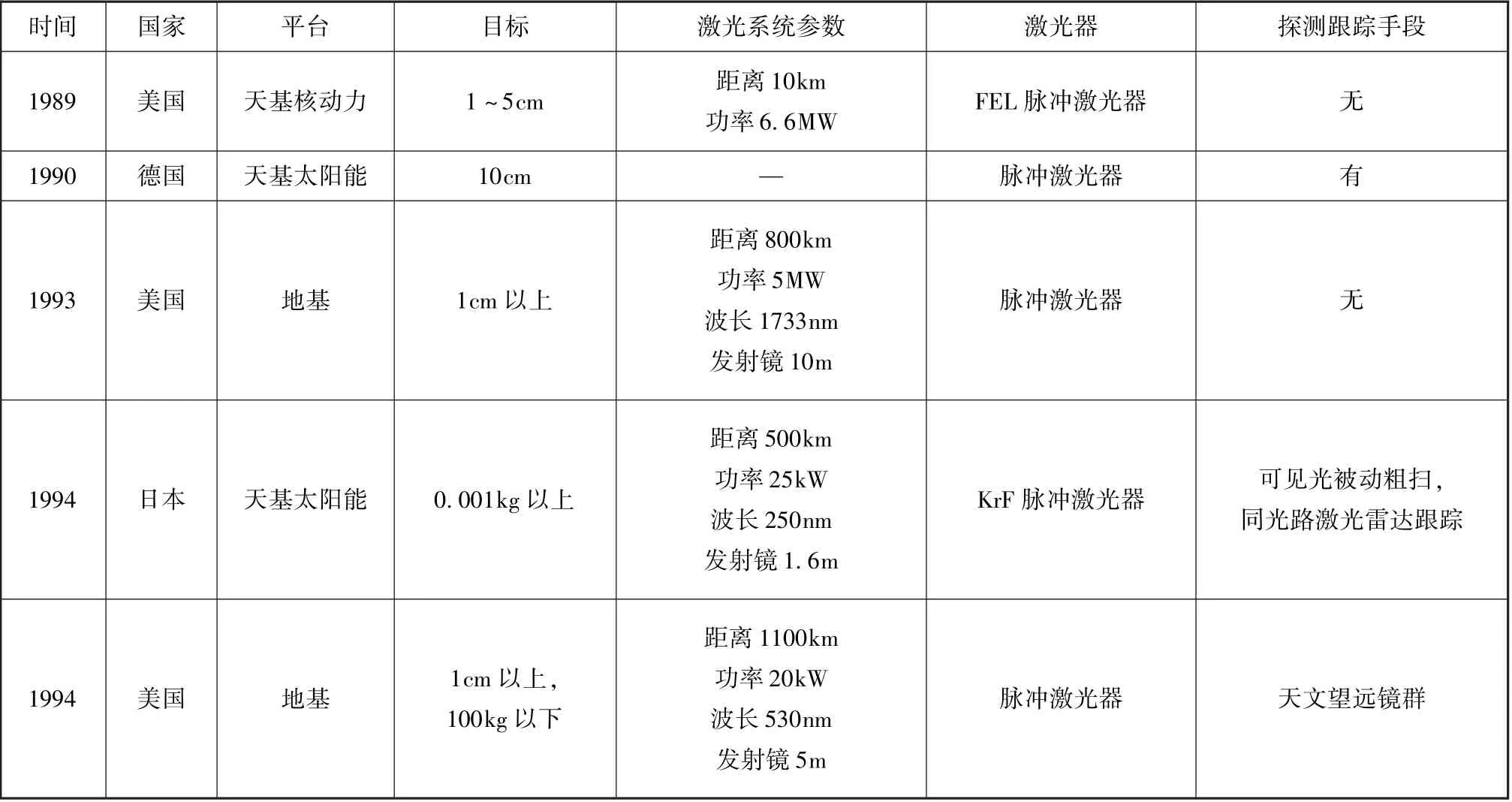
表1 激光移除空间碎片系统总体方案[5]Table 1 Overall concepts of laser space debris removal systems
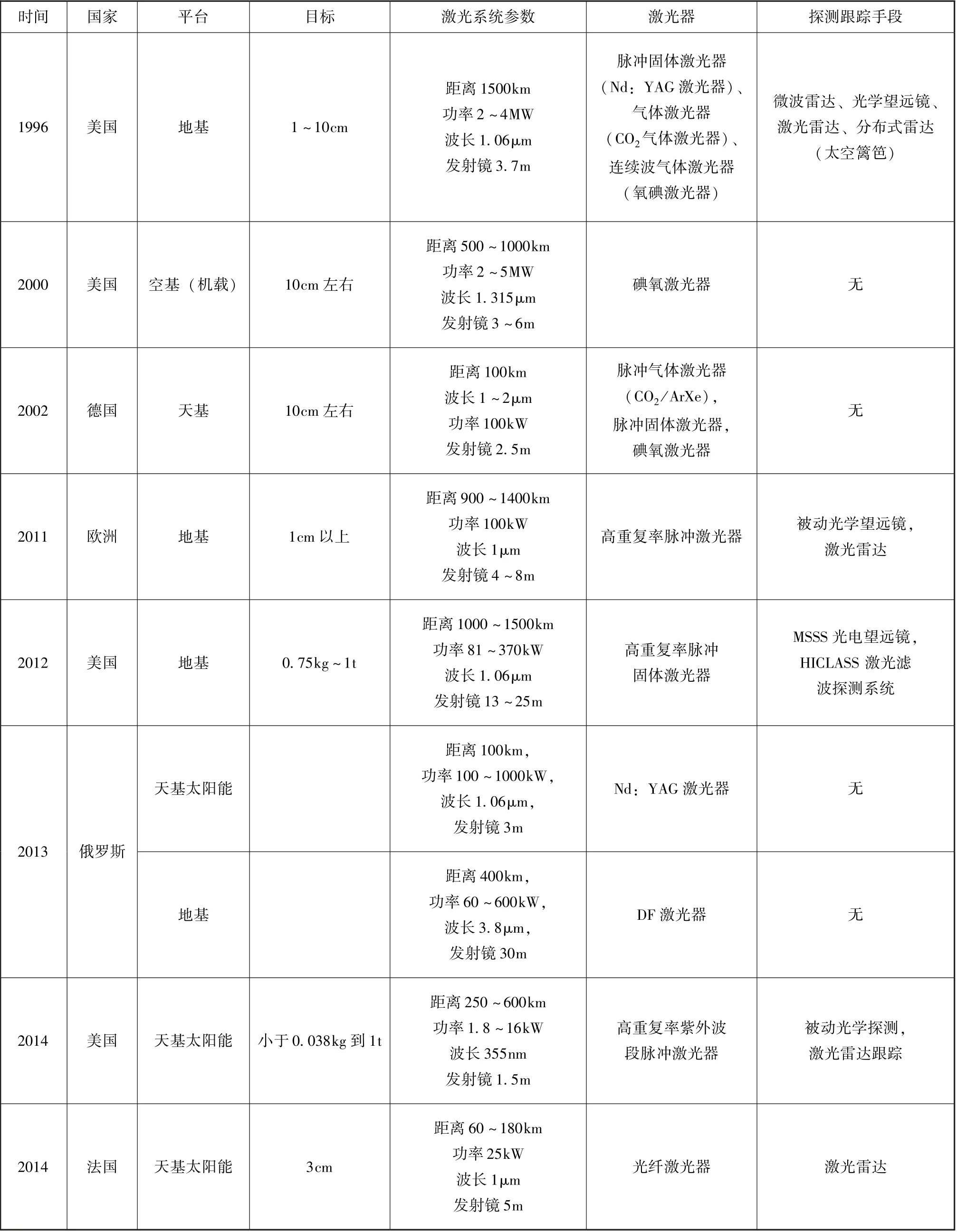
续表1
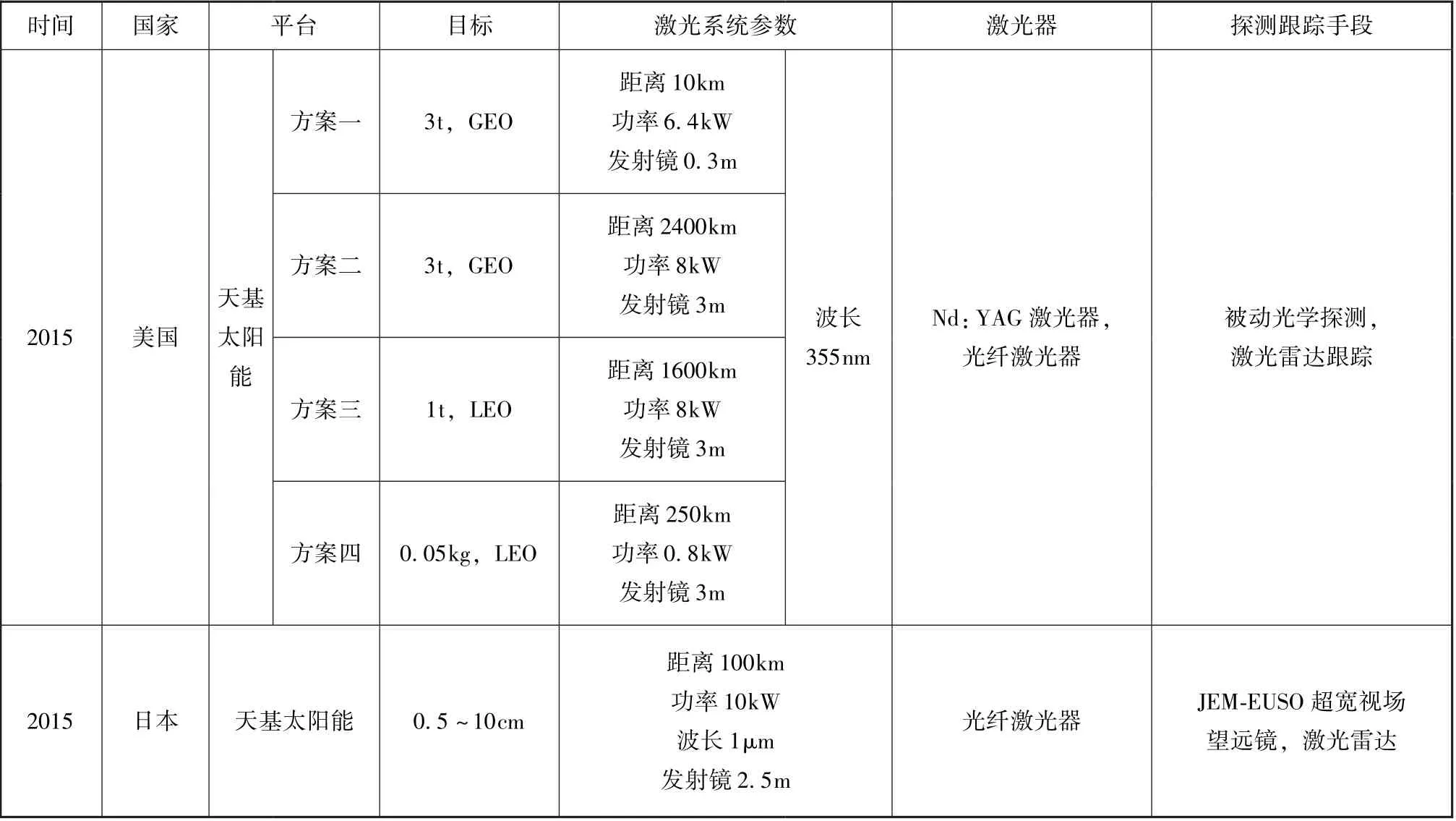
续表1
微波雷达是一种主动的探测方式, 通过向空间发射微波信号, 由接收器接收信号回波来确定空间碎片的位置和速度。 微波雷达作用范围大,不受光照和天气条件限制, 可全天时全天侯的进行空间碎片检测, 并且可以精确地获取其位置和速度。 但是, 微波雷达存在以下缺点: (1) 由于其设备体积大, 重量大, 尤其是天线尺寸太大,不适合天基部署; (2) 其能量转换效率低, 总功率要求高, 同样影响了天基部署。
被动光学系统是利用空间碎片对太阳光的反射, 采用高敏感度高分辨率的被动光学系统对碎片进行监测。 对于可见光波段, 在太阳照射背景黑暗时, 可以用望远镜探测空间碎片。对于天基测量而言, 如果采用合适的观测方向,避免地球亮背景、 太阳和月亮的影响, 可见光监测器看到的背景基本为深空黑背景, 可不受地面日照时间限制长时间探测碎片。 对于红外波段, 由于目标是较小尺度的碎片, 其红外辐射较小, 相对难以发现。
激光雷达需要自身发射激光波束, 通过接收空间碎片反射波束, 对接收信号进行处理, 实现空间碎片的监测和跟踪。 激光雷达不受光照条件限制, 基本可实现全天时与全天候监测, 并可精确地获取目标相对位置与速度信息。 但是随着监测距离的增加, 为了达到足够的信噪比, 激光聚焦点必须足够小, 这就限制了它的监测区域。 在目前激光功率有限的情况下, 作用距离受发射功率限制, 如果要提高作用距离, 必须按指数倍数提高发射功率。
目前的技术方案中, 基于光学的可见光被动探测手段和激光雷达是主流的碎片探测跟踪手段。 一方面, 通过共光路设计, 光学探测手段所需的大口径发射接收镜可与移除碎片的激光发射镜合二为一, 通过共光路设计在减少系统规模的同时还能实现所见即所打, 将激光跟瞄和发射的误差降到最低。 另一方面, 天基大口径光学镜组已在其他领域有广泛应用, 工程技术难度相对较小。
3.3 平台
天基激光移除碎片系统对天基平台的要求主要体现在平台稳定性、 能量供给及热控上, 由于移除碎片所需脉冲激光器平均输出功率并不大,大尺寸卫星平台和空间站现有指标参数都能充分满足需求。
3.4 移除策略
空间碎片主动移除策略是空间碎片主动移除工程化过程中必须要解决的关键问题。 尤其是在目前空间碎片数量众多且持续增长, 大量轨道都面临严重碎片威胁且移除能力有限的情况下, 需要我们准确地选择影响大的关键目标进行移除,以尽可能高效地控制碎片数量, 缓解碎片威胁。具体到激光移除, 由于其作用距离远、 移除周期短、 可重复使用等特点, 其目标选择策略和其他主动移除手段有很大不同, 不能仅仅局限于单个目标的分析, 而要扩展到对某条轨道甚至某一区域整体的移除策略研究。 同时由于其驱动变轨的工作方式, 还需要考虑确定平台在针对确定目标时包括激光作用参数时间周期等在内的碎片驱动变轨策略。 不同的作用策略对整个系统的探测距离、 跟踪距离、 作用距离、 激光能量密度等都会有不同的要求, 进而影响到探测跟踪设备, 激光器, 激光参数(波长, 脉宽、 重复率), 发射镜口径, 系统功耗的选择计算, 最终将导致完全不同的总体方案。 尤其是在现有激光器技术水平的限制下, 更需要通过移除策略的优化设计来最大化系统效能。
空间碎片的移除策略可粗略分为直接使其降轨再入大气层烧毁彻底移除和将其推离常用轨道两种方式。 针对LEO 轨道目标, 一方面, 由于其轨道高度低, 易于采用降轨移除方式; 另一方面, 该区域航天器密集, 碎片数量巨大, 简单推离常用轨道难以彻底排除其撞击隐患, 因而基本都采用降轨移除方式, 只在针对高撞击概率碎片的主动防御中会采用推离现有轨道的方式。 针对GEO 轨道目标, 由于其小碎片数量相对较少, 需要移除的目标大都是大尺寸的废弃航天器, 且轨道太高, 返回再入成本高昂, 因而普遍采用推入远离常用轨道的坟墓轨道方式。 两种方式的本质都是通过激光照射产生烧蚀反喷使碎片获得冲量从而改变其运动状态。
对于地基激光移除空间碎片系统, 由于基站的固定, 只有碎片过顶移除一种基本移除方式,区别只是一次过顶即提供足够的速度变量使其降轨再入和多次过顶逐渐累积速度变量两种方式。1996 年, 美国ORION 计划中针对不能在一次过顶中移除的目标, 提出了一种分层逐次移除的策略[15], 即将整个LEO 轨道待移除碎片按10 ~50km一层分为若干个区域, 当某一层的碎片被移除或降轨到下一层时, 才能将高一层的碎片降轨到该层。 这样按照由低到高逐次对各层碎片进行降轨移除, 可使得移除过程中每个区域的碎片密度都不会因为降轨过程而增加, 维持碎片环境在稳定中下降。
对于天基激光移除空间碎片系统, 由于其本身也是在轨道上运动的, 且自身也可以变轨机动, 因而在移除策略上可以灵活得多。 无论是针对LEO 还是GEO 轨道、 大型废弃航天器火箭残骸还是厘米级小碎片, 天基系统都有灵活多变的移除手段和策略, 但是相关具体研究还比较少。2015 年, C. Phipps 针对GEO 轨道上质量3t 左右的大型废弃航天器制定了单平台变轨跟随退离和漂移轨道双平台轮流退离, 两个推离现轨道进入坟墓轨道的移除方案来移除GEO 轨道上的碎片[21], 如图7、 图8 所示。
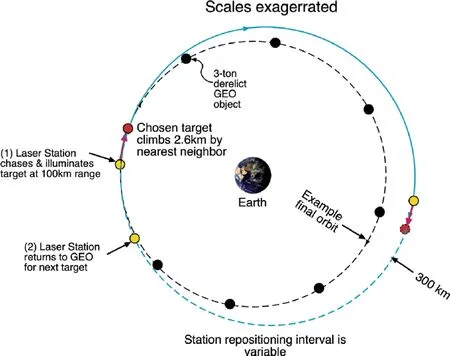
图7 单平台GEO 轨道碎片移除策略Fig.7 Single-platform GEO orbit debris removal strategy
目前空间碎片移除策略的相关研究较少且不够深入, 基本都停留在简单的作用角度和速度改变量计算上, 其主要目的也都着眼于对平台移除能力的估计, 缺少包括目标选择策略、 碎片降轨路径规划、 激光驱动策略等较精细的移除策略分析和研究, 更没有对此类过程的模拟演示手段。这也进一步导致了在方案设计中系统参数指标选择上的盲目性。
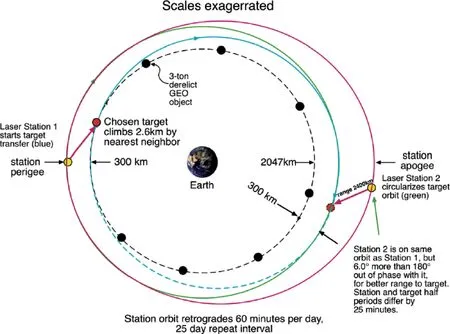
图8 多平台GEO 轨道碎片移除策略Fig.8 Multi-platform GEO orbit debris removal strategy
4 发展趋势
目前, 天基激光移除空间碎片系统已经基本验证了其可行性并完成了多个总体方案的设计论证, 正在关键技术攻关和向工程化应用发展的阶段。 各国方案已逐渐趋向统一, 天基平台、 Nd:YAG 激光器或光纤激光器搭配与激光发射系统共光路的主被动光学探测跟踪系统是当前主流方案的选择。
当前技术进一步发展尤其是工程化推进的主要障碍在于各分系统硬件技术水平的限制, 尤其是天基高能量激光器单脉冲能量、 重频、 功率等性能参数的不足。 由于硬件条件的制约, 导致现有的移除系统方案往往都只能停留在纸面上, 难以实现工程化。 在最近一两年的研究中, 各国学者都开始从方案可行性的计算论证上转移到基于现有激光器水平的应用探索或策略分析研究中。因为前期对移除策略的研究不足, 各系统方案都只做了简单的降轨能力计算, 并没有通过策略设计充分挖掘方案的能力潜力, 同时也导致系统方案缺乏进一步优化设计的方向和手段。
因此目前激光移除空间碎片的技术发展主要有两个大的方向。 一是在继续完善总体方案, 尽可能降低相关硬件参数需求, 减小相关关键技术研究突破压力的同时, 根据总体方案需求指导推进激光器的研究发展, 包括大能量Nd:YAG 固体激光器和光纤激光器。 二是从移除策略的角度进行优化, 基于现有硬件技术水平, 研究优化移除策略, 通过探索新的移除方法和方案, 在现有硬件技术条件约束下最大化其移除效能。
猜你喜欢
制造业自动化(2022年9期)2022-10-03
军事文摘(2022年17期)2022-09-24
北京航空航天大学学报(2022年7期)2022-08-06
都市人(2022年3期)2022-04-27
国际太空(2022年1期)2022-03-09
国际太空(2022年1期)2022-03-09
国际太空(2021年8期)2021-11-05
环球时报(2019-12-05)2019-12-05
计算机时代(2016年12期)2017-01-14
微型计算机·Geek(2009年3期)2009-12-11