上海天文台近红外波长空间碎片激光测距研究进展
2021-01-15 06:49吴志波龙明亮张海峰耿仁方张忠萍
空间碎片研究 2020年4期
吴志波, 龙明亮, 张海峰∗, 耿仁方,2, 张忠萍
(1. 中国科学院上海天文台, 上海200030; 2. 南京信息工程大学, 南京210044;3. 中国科学院空间目标与碎片观测重点实验室, 南京210008)
1 引言
随着全球空间技术的发展, 越来越多的飞行器被发射到地球外围空间, 使得地球轨道内无任何功能和作用的空间碎片越来越多, 包括火箭体、 失效的卫星以及航天器在轨解体碎片等[1-3]。 根据美国国家航空航天局(NASA) 轨道碎片计划组织发布的空间物体跟踪编目数据来看, 自1957 年开始,空间物体的数目逐年增多, 据有关机构估计, 尺寸10cm 以上的空间在轨物体总数已超过17000个[4,5]。 2019 年初, 美国新的“太空篱笆” 雷达系统将编目中的空间碎片数目从以前的23000 块增加到了200000 块, 并且还有明显的持续增加趋势。随着航天技术的快速发展, 空间碎片已严重威胁到了在轨航天器的安全, 成为国际关注的问题, 很多国家陆续开展了空间碎片探测技术研究。
相比微波雷达和光电探测等常规空间碎片监测手段, 激光测距技术对空间碎片目标测量精度要高1 ~2 个数量级, 十分有利于空间碎片目标识别和编目, 对提升空间碎片轨道预报精度和航天器机动规避成功率, 减少航天器的机动次数具有重要作用[6,7]。 目前, 地基空间碎片激光测距技术得到了快速发展, 美国、 澳大利亚、 奥地利、俄罗斯、 波兰和中国等国家均发展了空间碎片高精度激光测距技术[8-10]。 上海天文台积极瞄准国际空间碎片激光测距技术发展, 在国内率先发展了空间碎片激光测距技术, 于2008 年7 月在国内首次成功实现了900km 左右空间碎片激光测距,测距精度约1m[11]。 在此基础上对该技术进行了发展和应用, 采用532nm 波长输出功率60W 激光器技术等实现了空间碎片常规观测能力[12,13]; 云南天文台和国家天文台长春人造卫星观测站先后实现了空间碎片激光测量[14,15]。
空间碎片对入射激光信号进行漫反射, 只有极少数信号沿入射方向返回, 使得回波信号微弱。 因此, 空间碎片激光测距需要高的激光器功率。 对于532nm 波长空间碎片激光观测, 其532nm 波长激光是由1064nm 波长基频光倍频而来, 由于倍频晶体效率和损伤阈值问题使得532nm 波长激光器在窄脉冲高功率方面受限, 难以满足远距离、 小尺寸碎片目标测量需求。
对于1064nm 波长激光, 在激光能量、 大气传输、 背景噪声和回波光子数等方面优势明显, 国际上开展了近红外波长激光测距技术研究。 2003 年,澳大利亚光电系统控股有限公司(EOS) 斯特姆洛山测距站采用1.8m 口径望远镜, 使用50Hz 重复率、 100W 功率、 1064nm 波长激光器成功实现了对等效距离1000km、 直径10cm 空间碎片目标的测距, 测距精度为分米级[16]。 国内上海天文台和云南天文台近些年进行了近红外波长激光测距技术相关研究。 2016 年7—8 月上海天文台利用重复频率200Hz、 输出功率40W、 脉冲宽度为5.5ns 的1064nm 激光器, 在国内首次实现了对轨道高度400 ~36000km 合作目标以及低轨碎片目标测量试验[17]。 2016 年2—3 月, 云南天文台利用超导纳米线探测器(SNSPD), 实现了对不同轨道高度卫星的测距试验; 2017 年3—5 月, 利用百瓦功率纳秒1064nm 波长激光器, 实现了对多个空间碎片目标探测[18]。
在此基础上, 上海天文台从2018 年开展了高重复率、 高精度空间碎片近红外激光测距技术研究, 旨在实现对远距离小尺寸空间碎片的亚分米精度激光探测。 通过设计研制了532nm/1064nm双波长消色差发射系统, 应用于532nm 引导1064nm 波长光束指向监视与精确瞄准, 研制高精度近红外波段信号探测器等, 分别利用1kHz 重复率、 8W 功率和40W 功率的1064nm 激光器开展了空间碎片激光测量试验。 对比分析了8W@1064nm 与60W@532nm 波长空间碎片激光测距结果, 验证了近红外波长激光技术在空间碎片探测能力和噪声水平方面的优势。
2 近红外波长(1064nm) 激光测距技术
2.1 技术特点
激光测距系统使用的532nm 波长激光由基频1064nm 波长光倍频而来, 激光倍频器件转换效率通常不超过50%, 这直接导致激光器输出功率减少一倍。 在激光器其他指标不变的情况下, 采用1064nm 波长激光, 则输出功率可提高近一倍左右[20]。 由于避开了倍频器件的损伤及激光偏振态, 易于实现高功率激光输出。 此外, 每焦耳光子数和波长成反比, 对于相同能量的激光信号,1064nm 波长光子数为532nm 的2 倍, 这对于微弱回波信号的空间碎片激光测距来说也十分重要。
在大气透过率方面, 1064nm 波长激光也具有明显优势, 在垂直高度上, 1064nm 波长和532nm波长激光的大气透过率分别约为0.991 和0.812;在观测仰角20°时, 1064nm 的双程透过率为532nm 的3.5 倍左右[21]。 而且, 532nm 波长激光大气透过率随仰角变化大, 低仰角时较差, 而1064nm 波长激光的大气透过率基本不随仰角变化, 即使在低仰角时, 透过率也很高。 因此, 利用1064nm 波长进行激光测距, 观测弧段能覆盖较低的仰角, 增加了观测弧段的长度。
在背景噪声方面, 根据太阳光辐射光谱可知,532nm 波长和1064nm 波长分别为1.37W·m-2·nm-1和0.64W·m-2·nm-1, 可以看出1064nm 波长的太阳光噪声强度仅为532nm 的45%。 如果采用1064 nm 激光测距, 同样的滤波效果下1064nm 波长附近的噪声强度将减半, 可以获得更高的激光回波信噪比, 有利于提升目标信号探测能力, 如图1 所示。
2.2 系统组成
空间碎片激光测距系统如图2 所示, 主要由激光器、 接收望远镜、 伺服控制系统、 测距控制计算机、 光子探测器和计时器等组成。 激光器输出激光信号, 经折轴发射系统传输, 精确瞄准空间目标, 空间目标反射信号由接收系统接收, 并经光电转换输出回波信号; 事件计时器完成激光发射和接收时刻的记录, 生成空间目标到地面站点的高精度距离信息。 相比532nm 激光测距系统, 1064nm 波长激光测距需在激光器、 发射光路系统(包含发射望远镜)、 光子探测器和激光接收系统等子系统进行改进与提高。
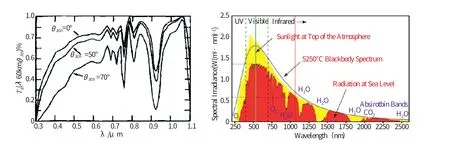
图1 不同波长大气透过率以及太阳光辐射强度谱分布Fig.1 The atmospheric transmissivity for different wavelengths and spectrum intensity of solar radiation
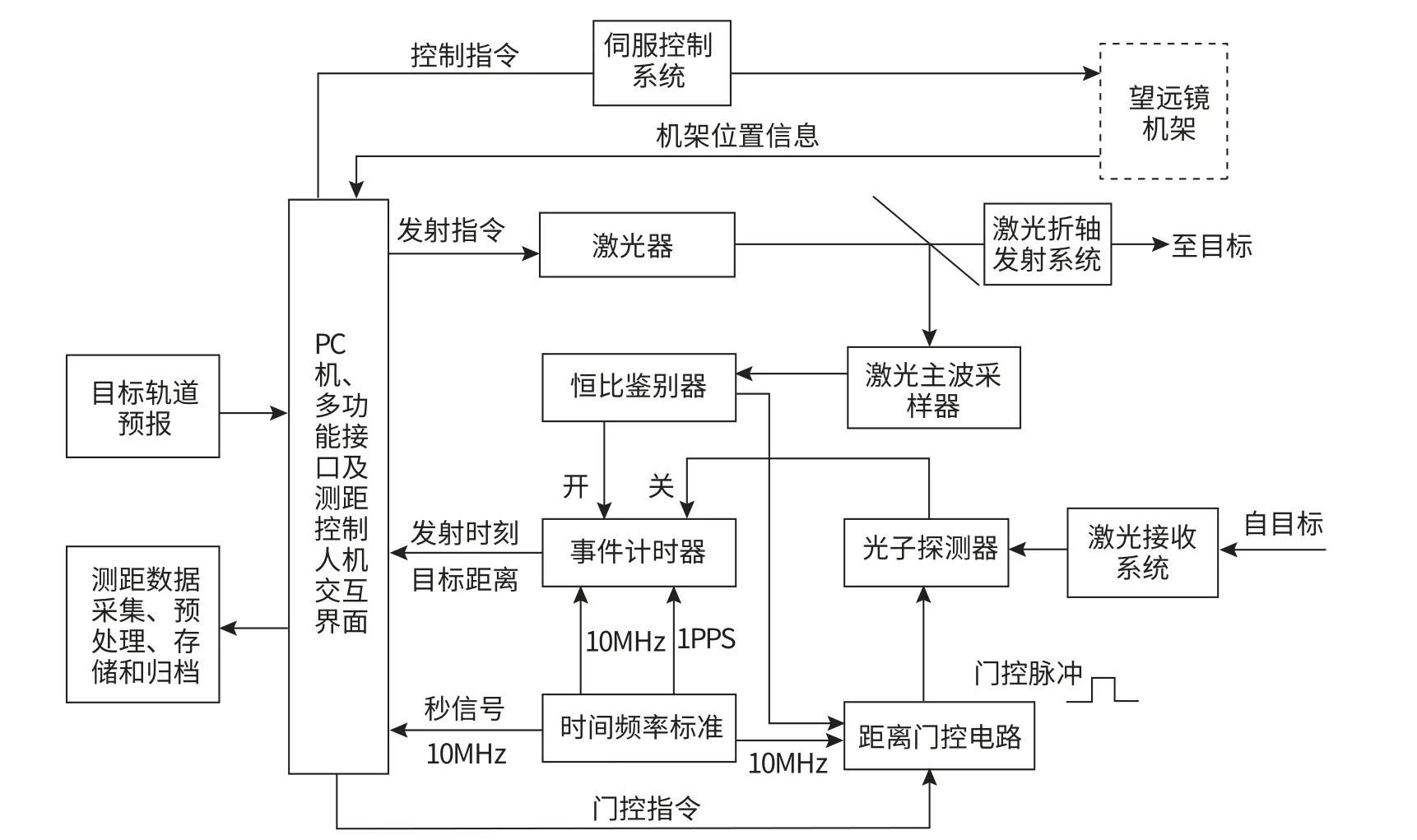
图2 空间碎片激光测距系统组成图Fig.2 The sketch of space debris laser ranging system
2.2.1 近红外波长激光器
高功率激光器是空间碎片激光测距分系统中的关键部件, 是测距系统的心脏, 置于净化间中的固定平台上, 用于产生稳定的、 高质量的激光脉冲信号, 经激光折轴系统、 激光发射望远镜射向空间目标, 如图3 所示。
上海天文台在现有4.2W@1kHz、 532nm 波长皮秒激光器基础上, 通过调节激光倍频晶体LBO, 输出1064nm 波长基频光。
目前在所有倍频晶体中, LBO 晶体拥有倍频光与基频光最小的走离角, 即532nm 与1064nm两光束的重合度最高。 图4 中角α 为倍频过程中532nm 与1064nm 波长的分离角, 通常在角秒级。此外, LBO 晶体具有较高的损伤阈值, 在非线性激光频率转换广泛使用。
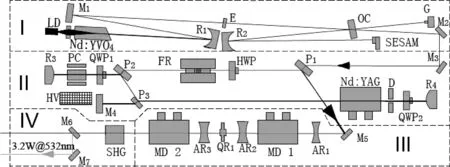
图3 皮秒激光器光学原理图Fig.3 The inner optical principle of pico-second laser system
2019 年, 通过上述方法, 获得了8W 的1064nm 基频光输出, 为空间碎片近红外波长激光测距提供了激光源。 同时, 由于少量532nm 波长激光输出, 且与1064nm 波长激光平行, 通过调节532nm 波长激光发射光路实现对1064nm 波长激光的引导。
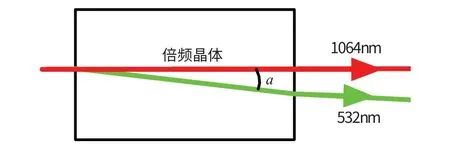
图4 激光倍频中1064nm 与532nm 波长光的走离角Fig.4 The angle between 1064nm and 532nm wavelength laser
2.2.2 近红外波长单光子探测器
目前在空间合作目标激光测距领域普遍使用的是基于硅材料的单光子探测器, 光敏面直径200μm, 暗噪声约200k, 量子效率(532nm) 为20%, 探测精度高达毫米级。 对于空间碎片测距,激光回波信号微弱, 这要求探测器具有高探测效率和低暗噪声的特性, 同时具备高精度测量特性, 因此上述单光子探测器对可见532nm 波段响应, 不能满足1064nm 波段激光的接收能力。为此, 选用了具有近红外波段激光响应能力的InGaAs 材料APD 单光子探测器, 探测效率和时间抖动分别约为20%和70ps, 满足空间目标回波探测和测距精度要求。 所采用的近红外波段单光子探测器及性能参数如图5 所示。

图5 InGaAs-APD 近红外波段单光子探测器Fig.5 The near infrared single photon detection with InGaAs-APD
2.2.3 1064nm 波长激光指向监视与瞄准
对于1064nm 波长激光, 人眼看不见, 且可见光导星监视器无法对激光束指向监视, 影响了1064nm 波长激光对卫星的精确指向与瞄准, 为此建立了532nm 波长激光引导1064nm 波长激光瞄准系统。 通过应用532nm 波长可见光的发射光路, 确定发射光路的空间两个基准点P1、 P2。 然后导入1064nm 红外激光, 当1064nm 波长激光与基准激光光路不重合时, 通过调节基准点P1 和P2 所对应的光学镜M1 和M2, 实现1064nm 激光传输方向与基准光路的重合 (重复度可小于10arcsec)。 通过可见光监视器对532nm 波长激光信号监视, 引导1064nm 波长激光指向与瞄准。
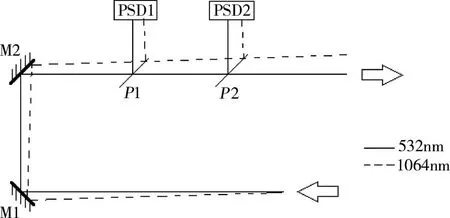
图6 532nm 波长激光引导1064nm 波长激光瞄准Fig.6 The collimation of 1064nm wavelength laser guided by 532nm wavelength laser
3 近红外波长空间碎片激光测距试验
3.1 空间碎片激光测距结果
利用8W@ 1kHz、 1064nm 皮秒激光器和InGaAs-APD 近红外波段探测器搭建的近红外波长空间碎片激光测距系统, 以两行根数(TLE)作为碎片目标引导数据, 实现了多圈次空间碎片近红外波长激光测距, 空间碎片激光观测结果如图7 所示。
图8 给出了2019 年1 月22 日、 1 月24 日和1 月27 日三天内利用1064nm 波长激光(8W@1kHz) 测得的空间碎片的结果, 最远探测距离为2600km。 根据激光测距雷达方程, 激光回波数与目标横截面积成正比、 与距离四次方成反比的关系, 将1064nm 波长实测数据的结果等效成雷达截面积1m2对应的最远径向距离, 最远等效距离为1518km (ID:39411), 如图8 (a) 所示。 结合图8 (b) 可知, 空间碎片目标测距精度约50 ~100cm, 其中最好的测距精度为48.6cm(ID: 20788)。
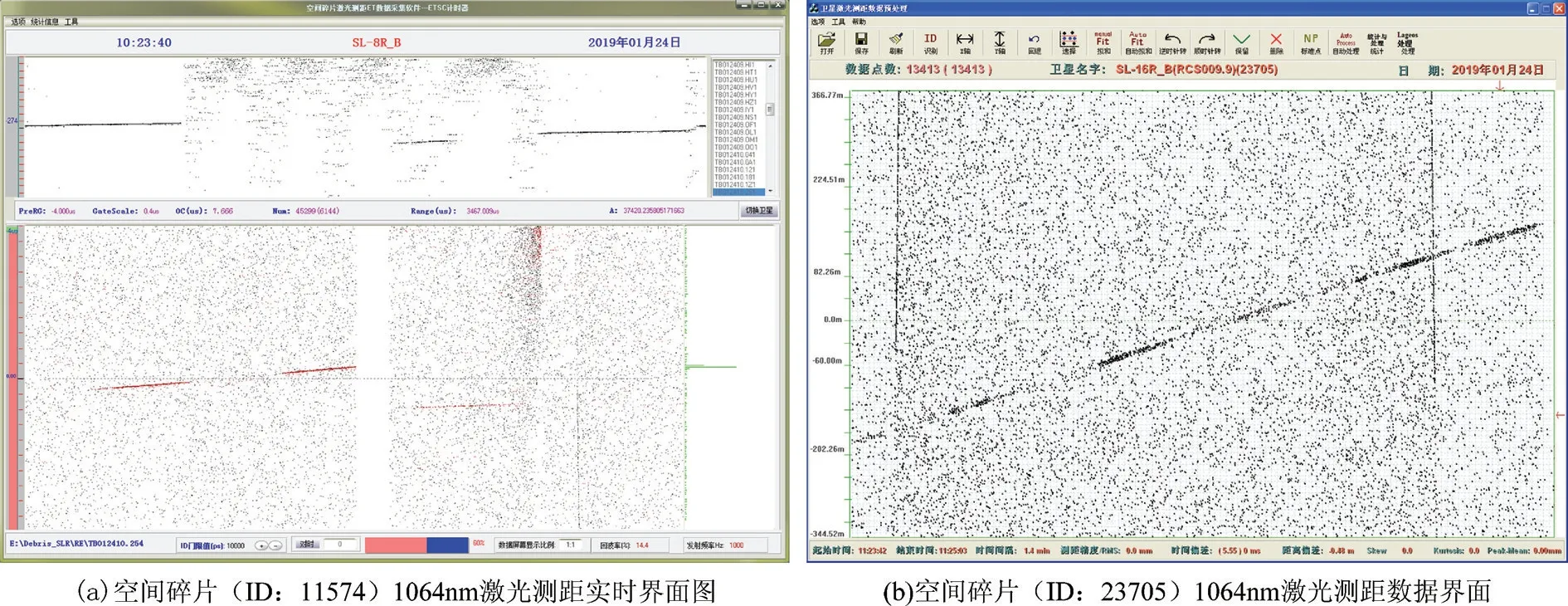
图7 1064nm 波长空间碎片激光测距结果Fig.7 The measuring result of laser ranging to space debris with 1064nm wavelength
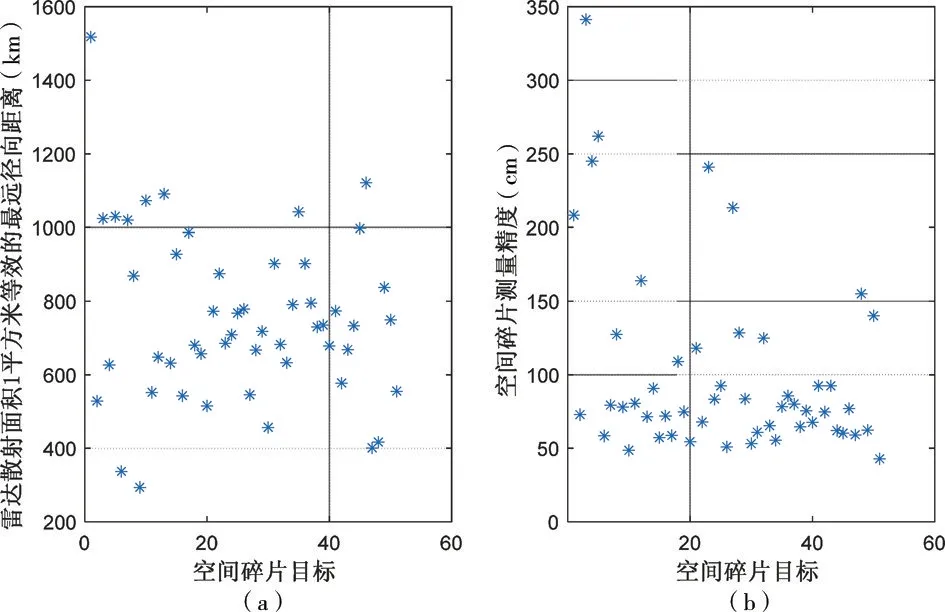
图8 8W@1kHz 纳秒激光近红波长空间碎片观测结果统计Fig.8 The statistics of ranging to space debris by 8W@1kHz pico-pulse width laser
3.2 空间碎片激光测距性能分析
3.2.1 测距噪声比对分析
图9 给出了分别采用1064nm 波长单光子探测器和532nm 单光子探测器在白天时段噪声分布情况(望远镜指向与太阳位置夹角50°), 其中,两个探测器采用相同的接收视场; 1064nm 波长探测器使用2nm 带宽滤光片、 532nm 波长探测器使用0.15nm 带宽滤光片。 根据测量结果, 对于532nm 波长探测器, 当门控信号发出时(探测器开始工作), 由于系统噪声强, 瞬间被噪声信号触发而导致后续有效回波信号无法再被探测; 对于1064nm 波长探测器, 由于系统噪声弱, 探测器开始工作后, 有较长探测时间, 利于有效回波信号接收。 这对于轨道预报精度不高的空间碎片目标观测尤为重要, 可设置较宽的距离门对目标距离误差进行搜索, 也体现了1064nm 波长激光在空间碎片激光测距的优势。
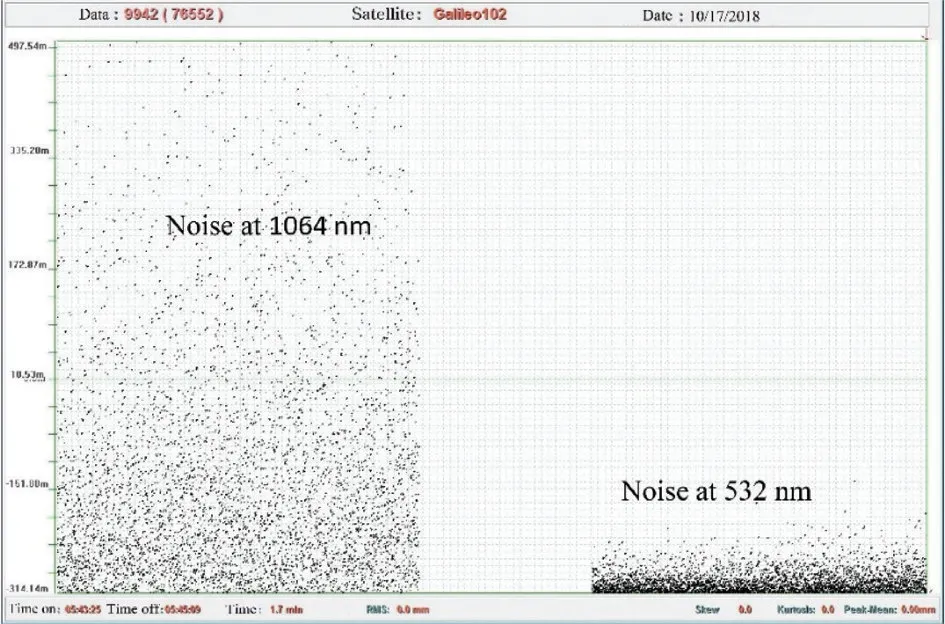
图9 1064nm 波长探测器与532nm 波长探测器白天条件下噪声对比Fig.9 The comparison of noises produced by 1064nm and 532nm wavelength detector in daylight
3.2.2 激光探测能力对比分析
(1) 探测能力理论分析
结合空间碎片激光测距雷达方程和地面测量系统最低回波光子数探测阈值, 可分析近红外波长空间碎片激光测距系统的探测能力。 空间碎片激光测距雷达方程如下[23]:

其中, Gt为发射系统增益:

式中, n0为系统可接收的平均光电子数; ηq为探测器效率; λ 为激光波长; h 为普朗克常数, 取6.626 ×10-34J·s; c 为光速, 取3 ×108m/s; Et为激光脉冲能量; Ar为接收系统的有效面积, 取0.251 m2; σ 为空间目标截面积; θt为激光发散角; R 为目标径向距离; Ta为单程大气透过率;nt为激光发射光学效率; nr为系统接收光学效率; θ 为发射光束指向偏差, 取0.5arcsec。 根据激光测距雷达方程及表1 给出的532nm 和1064nm 波长激光对应的系统参数, 对于同一目标在相同距离情况下, 假定60W@200Hz、 532nm 波长测距系统每秒钟可获得N0个回波数, 则8W@ 1kHz、1064nm 波长测距系统每秒钟探测回波数约为0.15 N0。
(2) 探测能力实测结果分析
根据激光测距雷达方程, 在相同激光回波数情况下, 激光测距系统可探测的目标尺寸与目标距离平方成反比。 根据此关系对比分析了8W@1kHz、1064nm 波长测距系统与60W@200Hz、 532nm 波长测距系统实际观测结果, 分别将532nm 波长和1064nm 波长测距系统探测目标尺寸等效成50cm时可探测的最远距离, 计算结果如图10 所示。 由图可知, 对于尺寸50cm 空间目标, 1064nm 波长测距系统可探测最远距离为750km; 532nm 波长测距系统可探测最远距离为1300km。 因此8W@1kHz、1064nm 波长测距系统探测能力是60W@200Hz、532nm 波长测距系统的(750/1300)4≈0.11 倍, 这与前节理论分析的探测能力结果(0.15 倍) 基本相符, 验证了近红外波长激光探测理论, 可作为近红外波长激光测距系统对空间目标探测能力的评估依据。
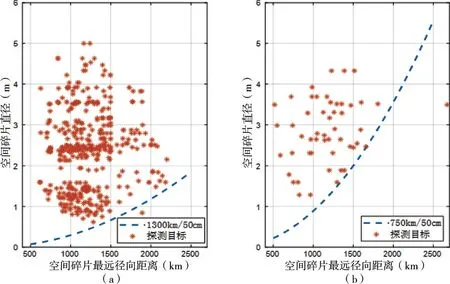
图10 532nm 波长探测系统(60W@200Hz) 和1064nm 波长探测系统(8W@1kHz) 探测能力分析(接收口径为60cm)Fig.10 The detection ability of 532nm (60W@200Hz)and 1064nm (8W@1kHz) laser ranging systems with the receiving aperture of 60cm
3.3 千赫兹重复率40W、 1064nm 波长激光器系统测量试验
为开展远距离小尺寸碎片目标、 亚分米级精度测量研究, 2020 年8 月合作研制了1kHz 重复率、 输出功率达40W、 1064nm 波长激光器系统,激光脉宽约100ps。 应用该激光器系统开展了空间碎片测量试验, 实现了数圈次的空间碎片激光测量, 其中对一颗失效的铱星目标测量, 测距精度达亚分米级(9cm), 最远距离达2600km, 测量结果如图11 所示, 初步验证了该激光器系统在空间碎片激光测距的高精度特性。 在此基础上,上海天文台还将继续优化该激光器的光束质量以及系统接收性能, 提升现有1064nm 波长空间碎片激光测距系统的探测能力, 应用于远距离小尺寸空间碎片的高精度探测, 为发挥1064nm 波长低背景噪声技术优势。
4 总结

表1 上海天文台532nm 和1064nm 波长激光测距系统参数[5]Table 1 The specifications of laser ranging system for 532nm and 1064nm at Shanghai Observatory
相比532nm 波长空间碎片激光测距系统,1064nm 波长激光在信噪比以及探测能力等方面优势明显, 对促进高精度激光测距技术在空间碎片轨道精密测量具有重要作用。 基于532nm 波长空间碎片激光测距技术, 上海天文台在国内率先发展了1064nm 波长激光测距技术, 建立了近红外波长空间碎片激光测距试验系统, 实现了空间碎片目标测量。 通过对观测数据结果的比对分析,验证了1064nm 波长激光测距系统测量能力。 为发展远距离小尺寸目标亚分米级精度测量研究, 合作研制了千赫兹重复率, 输出功率40W、 1064nm 波长皮秒激光器系统, 实现了最远2600km 以及失效铱星目标的亚分米级精度测量。 在此基础上, 还将继续优化该激光器系统光束质量、 激光发射系统、 信号接收与探测性能, 研究该激光器系统对空间碎片探测能力, 应用于远距离小尺寸空间碎片的高精度探测; 充分发挥近红外波长激光测距技术的高测量精度、 强探测能力以及噪声低等优势, 为发展白天观测条件下的空间碎片激光测距技术奠定基础。
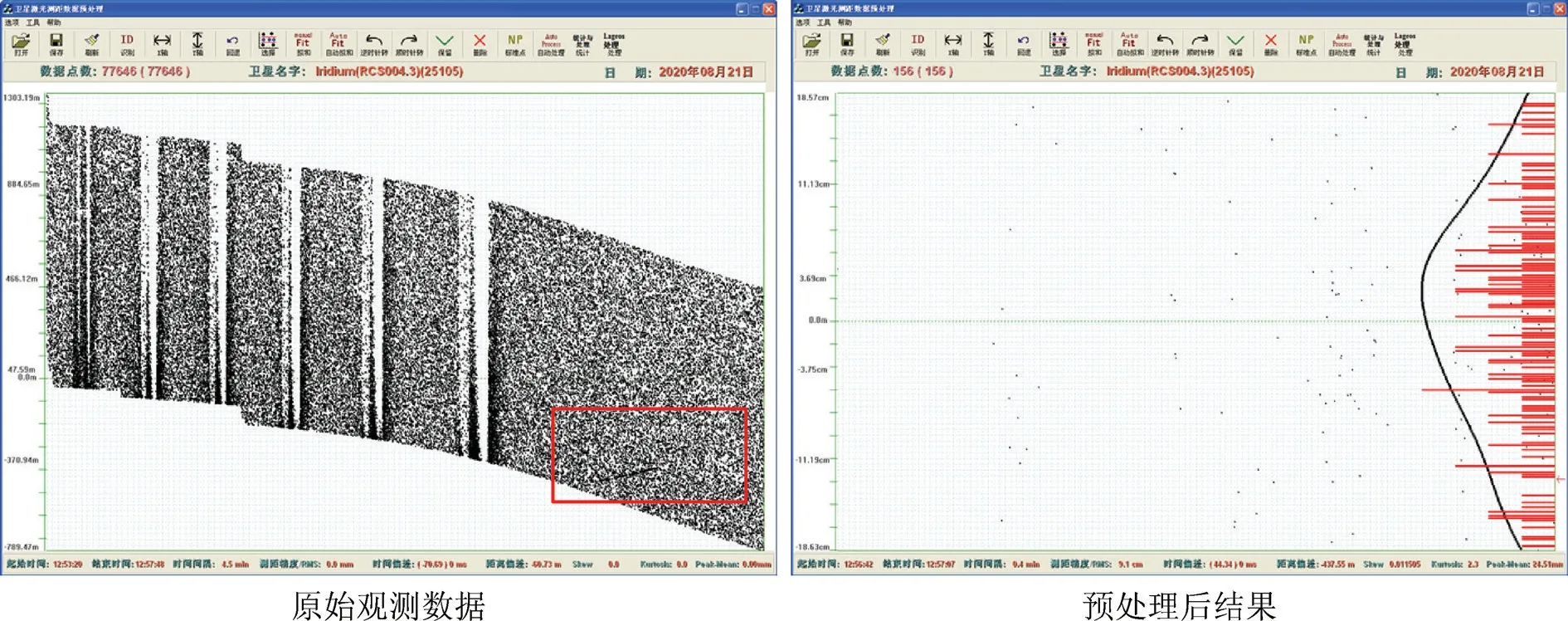
图11 40W@1kHz 激光器系统对铱星目标测距结果Fig.11 The measuring result of ranging to disable Iridium by using 40W@1kHz laser system
猜你喜欢
制造业自动化(2022年9期)2022-10-03
导航定位学报(2022年4期)2022-08-15
航天返回与遥感(2021年6期)2022-01-11
电脑知识与技术(2016年7期)2016-05-19
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
现代电子技术(2014年16期)2014-08-20
微型计算机·Geek(2009年3期)2009-12-11