空间碎片激光测距研究进展
2021-01-15 06:49汤儒峰翟东升张海涛皮晓宇李春晓伏红林李荣旺李祝莲李语强
空间碎片研究 2020年4期
汤儒峰, 翟东升,2, 张海涛, 皮晓宇, 李春晓,3,伏红林, 李荣旺,2, 李祝莲,2, 李语强,2
(1. 中国科学院云南天文台, 昆明650216; 2. 中国科学院空间目标与碎片观测重点试验室, 南京210034; 3. 中国科学院大学, 北京100049)
1 引言
自20 世纪50 年代末首颗人造地球卫星Sputnik 1 升空以来, 人类航天活动日趋频繁, 作为其伴随产物, 火箭残骸与喷射物、 失效荷载、航天器解体、 爆炸以及碰撞而产生的大量碎片不断增多, 逐渐形成了一个人为的空间碎片环境,这对有限的轨道资源构成了严重的威胁[1]。 大力发展对空间碎片的跟踪监视新技术, 增强对空间碎片环境的碰撞、 规避、 预警能力, 对保障航天活动的安全和可持续地开发利用空间资源具有极其重要的科学价值和现实意义[2]。
空间碎片的尺度从米级到微米级不等, 截止到2018 年底, 尺寸大于10cm 的碎片数量约为2.3 万个; 大于1cm 的碎片数量约为90 万个; 大于1mm 的碎片数量数以亿计[3]。 这些碎片主要集中于低轨区(LEO, 轨道高度为2000km 以下)、中轨区(MEO, 轨道高度约20000km) 和地球同步轨道区(GEO, 轨道高度约36000km), 其中低轨区分布较为密集(约3000t), 被NASA 轨道碎片计划办公室(ODOP) 编目的碎片多集中在轨道高度为600 ~1000km 的空间范围内。
数量众多的空间碎片给在轨执行任务的空间目标带来了极大威胁, 这种威胁最典型的例子是2009 年众所周知的铱33 和宇宙2251 两颗卫星的碰撞, 这一灾难性的碰撞事件产生了数以千计的空间碎片, 使得空间环境更加恶劣[4]。 2016 年8 月,哨兵-1A (Sentinel-1A) 卫星太阳能电池帆板遭受一个尺寸约为1cm 的空间碎片撞击, 此次事件不但使得该卫星受到了永久性的损伤和姿态变化,并产生了至少8 个空间碎片[5]。
针对空间碎片的大小、 质量以及空间分布,目前有多种手段可以对空间碎片进行测量。 利用光学望远镜, 可以跟踪在LEO 和GEO 轨道上10cm 以上尺寸的空间碎片, 并研究它们的亮度和旋转等物理特性。 地基雷达则能够对10cm 以下的低轨目标进行跟踪和监控, 而近地探测器和返回式航天器能够测量微米大小的碎片和微流星体的流量、 大小和质量分布。
目前空间目标地基观测手段主要有光电探测[6]、 雷达、 电子篱笆[7]和激光测距, 其中激光测距技术是距离精度最高的测量技术。 目前, 针对合作目标的激光测距单次测量精度已提高到亚厘米级, 正向毫米级发展[8,9], 针对空间碎片的激光测距测量精度可以达到分米量级。
2 空间碎片激光测距发展
空间碎片激光测距(DLR) 技术源于卫星激光测距(SLR)。 两者原理相同, 均是通过测量激光信号从地面站到空间目标的往返时间, 从而获得空间目标的距离, 区别在于合作目标的角反射器可反射绝大部分入射激光, 而空间碎片对入射的激光束仅靠其表面漫反射, 能够返回到地面观测站的光子比例远低于合作目标; 另外一个不同点体现在两者的距离预报准确程度不同, SLR 针对的合作目标距离预报相对准确, 而非合作目标的距离预报误差较大[10]。
空间碎片激光测距的难点在于:
(1) 激光回波信号弱。 合作目标的激光角反射器反射效率高、 反射发散角小, 可以将绝大部分入射激光按原路反射回去。 对于空间碎片激光测距, 入射的激光束仅在目标表面发生漫反射,能够返回到地面观测站的激光光子相对很少, 回波信号弱。 在测距过程中, 地面系统需要具备较强的探测与信号识别能力, 才能提高测距成功率。
(2) 轨道预报精度低。 卫星激光测距中合作目标的轨道通常是由遍布全球的观测站每日提供的多弧段测量数据共同确定的, 一般其定轨精度可以达到米级。 而空间碎片目前很难开展全球的联测, 测量数据相对少很多, 其定轨精度在公里级, 因而其预报精度也低。 在进行激光测距中,预报精度低给测距带来许多挑战, 如测距中往往需要加宽距离门并进行目标实时搜索, 这样会导致背景噪声增强, 降低探测成功概率。
基于以上两点, 对于空间碎片漫反射激光测距系统而言, 配备较大口径、 高效率的接收系统, 稳定性好的高功率激光器及高灵敏度光子探测器是必要的, 这样才有可能使观测站收到足够的回波信号, 提高探测成功率, 进行有效的测距。
2.1 空间碎片激光测距国外发展
2000 年, 澳大利亚光电系统公司(EOS) 公司在该国堪培拉的Stromlo 激光测距站进行空间目标激光测距方面的工作。 2002 年, 在华盛顿召开的第13 届国际激光测距会议上, 该公司的研究人员Ben Greene 发表了题为《空间碎片的激光跟踪》 的报告[11], 报告中介绍了该公司在Stromlo激光测距站开展的空间碎片激光测距研究, 该测距系统采用口径76cm 的望远镜和高能量激光器,对距离约为1250km、 尺寸约为15cm 的空间碎片进行了激光测距。 该激光测距站于2003 年1 月毁于森林火灾, 2004 年重建了望远镜口径为1.8m的空间碎片激光测距系统(见图1)。 2010 年该站系统升级改造, 采用重复频率为100Hz、 功率250W、 脉宽5ns 的高功率激光器, 在空间碎片激光测距中取得很好的测量效果, 测量的目标最小尺寸达5cm, 是目前已知的空间碎片激光测距技术最高水平。
2011 年, 奥地利Graz 激光测距站采用发射重复频率1kHz、 功率25W、 脉宽10ns、 波长532nm激光器, 实现了空间碎片激光测距。 该站测量空间碎片的距离范围为600 ~2500km, 测距精度约为0.7m, 雷达散射截面(RCS) 范围为0.3 ~15m2。2015 年, 奥地利Graz 站实现了轨道高度为3000km、截面积最小为0.3m2的空间碎片激光测距[12]。2019 年4 月至10 月, 奥地利Graz 站开展了白天空间碎片激光测距试验, 成功获得多颗空间碎片的激光回波信号(见图2), 率先实现了白天空间碎片激光测距。 试验期间, 测量到激光回波信号时, 太阳高度角最高为39°; 测量信号数据最长持续时间约100s[13]。
2015 年, 法国Grasse 激光测距站利用口径1.56m 的望远镜实现了轨道高度约为1700km 的DLR 测距。 2016 年中, 波兰的Borowiec 激光测距站开展了空间碎片激光测距工作, 该测站采用了单脉冲能量450mJ、 重复频率为10Hz 的高功率激光器, 陆续获得了轨道高度为800 ~1200km 的非合作目标的回波[14]。 2017 年, 德国Wettzell 激光测距站报道了该站空间碎片激光测距进展, 该站分别使用1064nm 和532nm 波段激光进行了测量,获得了多圈数据, 测量最小目标的RCS 约为0.4m2。 此外, 国际上有多家测站也具备空间碎片激光测距能力, 如瑞士的Zimmerwald 测距站、德国的斯图加特站等。
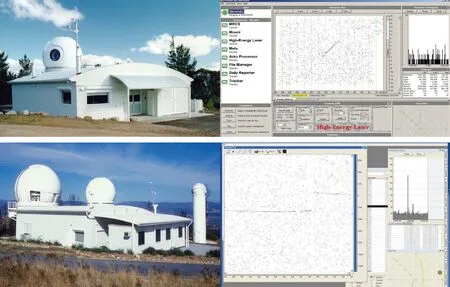
图1 重建前后的Stromlo 激光测距站及其碎片测量截图Fig.1 Stromlo laser ranging station and its debris measuring screenshot before and after reconstruction
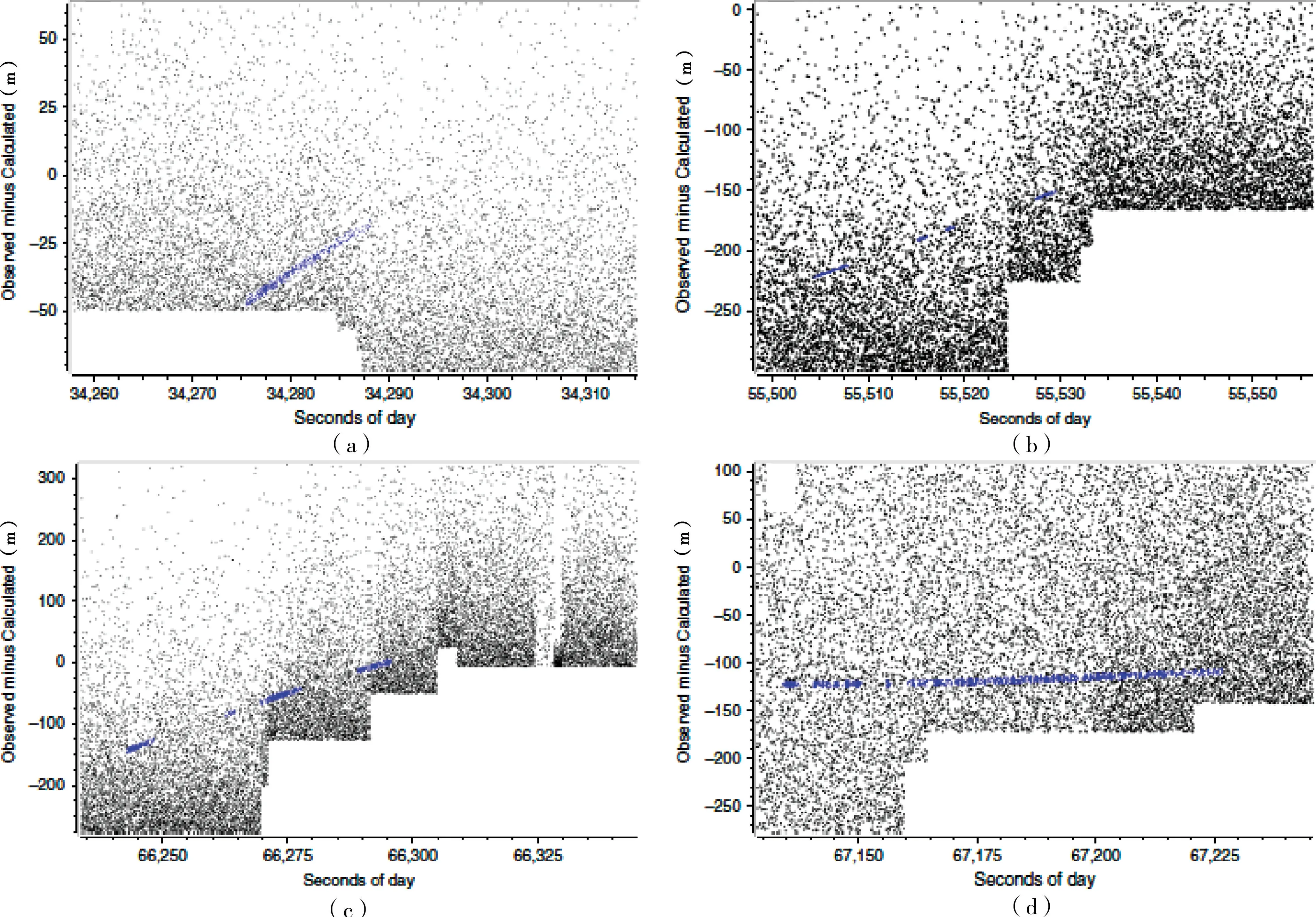
图2 Graz 激光测距站白天空间碎片测量数据截图Fig.2 Daytime space debris measuring data screenshot of Graz laser ranging station
2.2 空间碎片激光测距国内发展
在国内, 上海天文台最早开展并实现了空间碎片激光测距技术, 上海天文台在上海佘山观测站建立了使用大能量高功率激光器的空间目标测距试验系统 (激光器脉冲能量为2J, 波长为532nm, 重复频率为20Hz), 开展了非合作目标的激光跟踪和测距试验。 2008 年7 月该系统成功获得了3 个火箭体空间碎片的漫反射激光测距数据[15]。 2013 年3 月, 上海天文台与中国工程物理研究院应用光电子研究所开展合作, 对空间碎片激光测距系统进行了升级[16]。 新的测距系统采用了高重频的激光器, 该激光器单脉冲能量约为250mJ, 激光发射重复频率为200Hz, 波长为532nm。 该系统成功测量了多圈空间碎片激光测距数据, 其中最小碎片的RCS 为0.5m2。 2018年, 上海台采用功率3W、 激光脉宽30ps 的532nm 波段激光器(重复频率1kHz) 开展空间碎片激光测距实验, 对部分空间目标实现了约7cm的测距精度[17]。
2008 年初, 云南天文台积极开展空间碎片漫反射激光测距技术的研究, 云南天文台给激光测距系统配置了高能量激光器, 其激光器单脉冲能量最大可达4.5J, 激光发射重复频率为10Hz, 波长为532nm。 该系统于2010 年6 月7 日首次收到火箭残骸的回波。 随后, 云南天文台使用了高重频亚纳秒激光器, 在53cm 双筒望远镜上实现了千赫兹的高重频空间碎片激光测距系统, 达到了具有探测米级空间碎片(约1000km) 的能力[18]。
2016 年, 云南天文台搭建了基于超导探测器的红外波段(1064nm) 的空间目标激光测距实验平台, 成功地对部分空间目标进行了激光测距[19]。 实验中, 云南天文台利用现有的53cm 双筒望远镜及1.2m 望远镜, 构建了异地收/发的空间目标激光测距平台。 研究人员通过改造激光发射光路和回波接收光路, 将53cm 双筒望远镜作为激光发射端, 1.2m 望远镜作为回波接收端。 分别于2017 年3 月10 日至5 月31 日, 2018 年3 月26 日至5 月13 日, 在已构建的1064nm 漫反射激光测距系统平台上, 利用2 ×2 和4 ×4 阵列超导探测器进行了1064nm 波长的激光测距试验, 并成功获得回波信号数据, 验证了1064nm 探测器(1064nm 阵列超导探测器) 在激光测距中应用的可行性。 在两次实验中, 对超过100 颗轨道高度大于500km 的空间碎片进行了观测, 目标尺寸RCS 在0.046 ~14m2之间, 成功测得278 圈过境观测数据。 实验中测距最远距离约为5800km(编号12445, RCS 为18.5m2), 测量最小RCS约0.04m2(目标编号1520、 902、 900), 其中空间碎片1520 为直径36cm 的球状, 其RCS 约为0.04m2轨道高度约为1100km, 测量时距离1464 ~1568km (见图3)。
2013 年末, 长春人造卫星观测站完成了DLR系统安装与调试, 其中激光器脉冲能量为60mJ,重复频率500Hz, 波长为532nm, 光束质量小于1.5, 并于2014 年初获得了DLR 回波。 为了对空间碎片进行有效监测, 长春站基于60cm 口径望远镜卫星激光测距系统, 采用了实时时间偏差修正及目标闭环跟踪、 激光出射方向控制、 预报实时修正等技术, 建立了空间碎片激光测距系统, 实现了空间碎片高重频激光测距[20,21]。 长春站在2014 年2—5 月间的26 个观测日里获得有效数据466 圈,观测高度角范围19° ~87°, 测距精度可达1.0m(内符合精度), 测距距离范围400 ~1800km, 观测的目标雷达散射截面(RCS) 最小可达0.9m2。
3 空间碎片激光测距应用研究
精确测定空间碎片的位置和轨道, 有利于空间碎片的监测和规避, 结合激光测距数据和光学图像可以对空间碎片的姿态及其演化进行反演,改善空间目标轨道动力学模型, 提高对其监测的预警能力。 利用测量的DLR 数据, 结合测角数据, 对空间碎片进行精密定轨, 可开展高层大气科学等研究工作, 有望进一步提高空间目标的观测精度及轨道预报精度, 增强对空间碎片环境的分析预警能力。
3.1 空间碎片轨道确定
利用空间碎片的高精度激光测距数据, 可以显著地提高空间碎片的定轨精度, 从而提高空间碰撞风险评估和预警发布的准确性; 高精度测量数据也可以应用于碰撞预警的精确分析, 减少虚警信息, 对预警方法进行优化。 一直以来, 利用空间碎片激光测距数据对目标进行定轨是一项最基础也是最核心的应用研究。
2015 年, 云南天文台对DLR 数据及测角数据进行了仿真计算[22], 研究了利用激光测距数据联合测角数据对空间碎片进行单站定轨的方法。计算结果表明, 该方法的定轨精度优于单纯光学测角数据定轨的精度。 随着空间碎片激光测距技术的发展, 不少学者均开展了利用激光测距数据或联合测角数据对空间碎片进行定轨的研究[23-26], 但目前使用空间碎片激光测距数据进行定轨研究多是基于单站测量数据定轨, 定轨精度受限。
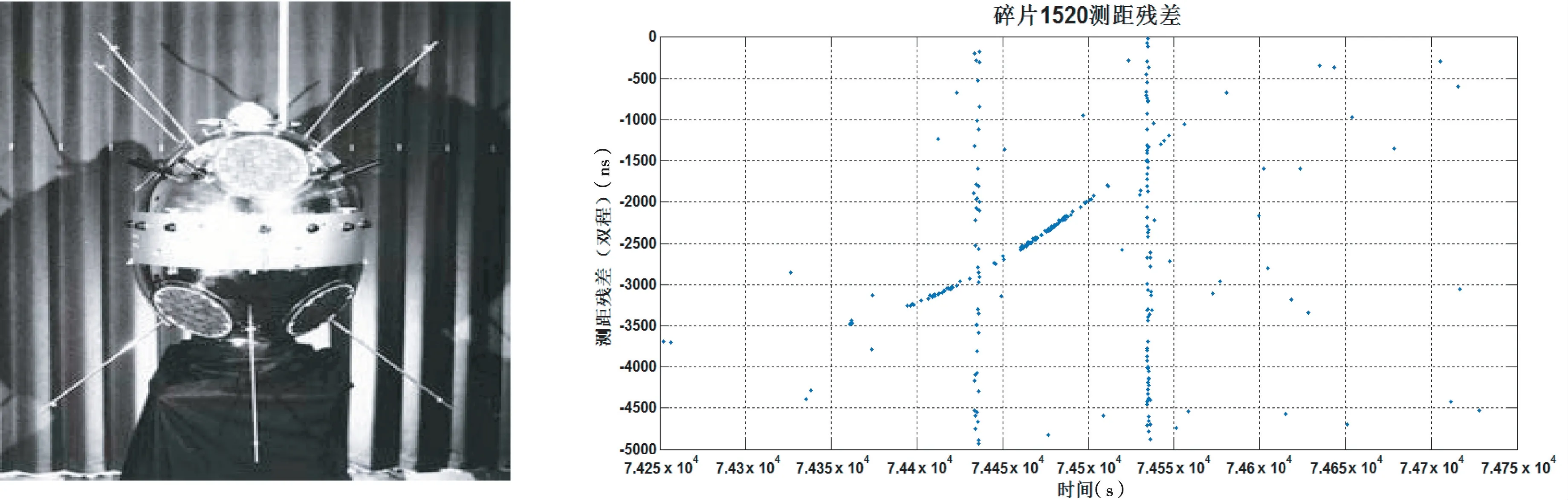
图3 碎片1520 外形以及测距残差Fig.3 Shape and ranging residual error of Debris 1520
3.2 空间环境研究
通过对空间碎片进行高精度的距离测量, 联合其他测量手段, 对空间碎片进行精密定轨, 可以分析研究空间目标所处的空间环境特征, 如利用特定轨道高度包括空间碎片在内的目标作为空间大气探针, 通过精密测定轨道研究高层大气密度演化规律, 如分析空间目标受到的光压摄动,以及空间中的微流星粒子密度等。
2017 年, 学者Daniel Kucharski 利用2014 年6 月10 日至2016 年10 月19 日全球各测站测量的失效卫星Topex 数据, 分析研究了该卫星的自转特征, 通过对其自转速率变化的研究, 认为该卫星所受到的太阳光压摄动使其自转加速[27]。 2019 年,紫金山天文台通过分析天宫1 号坠落前的激光测距数据, 得到了天宫1 号坠落前5 个月的自转参数及其变化, 并以此分析建立了大气密度梯度转矩模型[28]。
3.3 目标特征分析
随着空间碎片激光测距数据质量的提升, 目标本身的一些特性逐渐从数据中显现出来。 通过分析高精度激光测距数据, 可以对目标的自转、姿态、 尺寸等特征进行分析, 一方面可以改善目标的动力学模型, 提高空间目标轨道预报精度;另一方面, 分析了解目标的本身特征, 可以用于空间目标识别, 并对目标的运行状态进行分析和预测。
2015 年, 云南天文台提出了一种利用空间碎片激光测距误差来初步测定空间碎片尺度的方法, 并依次开展了地面靶激光测距实验和空间碎片激光测距实验, 初步验证了该方法的可行性,该方法可以作为空间碎片尺度测定的一种参考[22]。 2015 年, 奥地利Graz 站建立了空间目标距离与光变的同步测量系统, 该系统测量的数据能够确定空间目标的自转速率和姿态特征[29,30]。2018 年, 云南天文台使用基于超导探测器空间碎片测距系统采集的空间目标测量数据, 通过数据分离处理的手段, 实现了对空间目标距离信息与光变信息的同步测量, 并获取了部分目标的自转速率[31]。 图4 为云南天文台对空间目标自转特征分析初步结果, 图4 (a) 是2017 年4 月11 日该系统对失效卫星Topex 的同步测量数据, 红色是测距数据, 蓝色是光变数据, 图4 (a) 下部是对同步测量数据分别处理得到的卫星自转周期数据(激光测算周期10.562s, 光变测算周期10.568s);图4 (b) 是碎片20853 从2017 年5 月3 日至5 月6 日测量数据的频谱分析图, 分析结果显示该目标的转动频率约为3.45s; 图4 (c) 是铱星33 碎片(编号33777) 测量数据频谱图, 测算出该碎片的自转周期约为5.82s; 图4 (d) 是碎片41858 测量数据的周期分析图, 测算出该碎片的自转周期约为14s。
4 空间碎片激光测距技术发展趋势
经过近20 年的发展, 空间碎片激光测距技术有了长足进步, 各国激光测距台站从最初的实现空间碎片激光测距技术, 开始逐渐追求高效率、高精度、 远距离空间碎片激光测距技术。 为此,激光测距领域出现了空间碎片多站联合测量、 红外波段激光测距、 白天空间碎片激光测距、 地影中碎片激光测距等技术。 涉及技术细节上, 还有碎片预报偏差实时修正技术、 无预报目标捕获跟踪技术、 自适应辅助探测等技术。
4.1 多站联合激光测距
多站联合的测量是使用地面不同位置的两个或者多个望远镜对空间目标进行激光测距。 在空间碎片激光测距中, 由于激光脉冲在目标表面发生漫反射, 反射的激光束在地面覆盖范围大, 可以满足不同位置望远镜接收激光回波的要求。 通常, 地面系统的探测距离、 对小目标的探测能力均与望远镜有效接收面积成正比。 为了提高地面系统对远距离、 小尺寸目标的测距成功率, 可以采用大口径望远镜接收激光回波, 但是大口径望远镜研制难度大、 造价高、 运行维护工作量大。多个望远镜共同测量一方面相当于提高了地面系统的有效接收面积, 另一方面多站从不同方位测量目标距离, 可以提高定轨精度。
2012—2013 年, 奥地利Graz 激光测距站联合欧洲几个测距站进行了联合测量实验, 如图5 所示, Graz 站使用强激光 (200mJ, 532nm, 3ns,80Hz) 跟踪失效卫星ENVISAT, 处在600km 外的瑞士Zimmerwald 站成功地探测并标注这些漫反射光子。 随后, 奥地利Graz 站与英国Herstmonceux站、 德国Wettzell 站均成功开展了多站联合测量实验[32]。 国内, 2014 年上海天文台利用建立的1.56m/60cm 双望远镜激光测距系统, 采用60W、200Hz 的激光器开展了联合测量实验, 对多颗火箭体进行了测量[33]。 2016—2017 年, 云南天文台基于本台站的53cm 口径双筒望远镜和1.2m 望远镜建立了联合测量实验系统, 该系统采用了大功率激光器, 其最大工作功率可达300W, 发射重复频率为100Hz, 激光脉冲宽度为5.7ns, 激光波长1064nm, 系统采用2 ×2 阵列超导探测器探测回波光子, 该系统使用了红外波段激光、 阵列探测技术, 对空间碎片测量获得了很好的结果[19,31]。
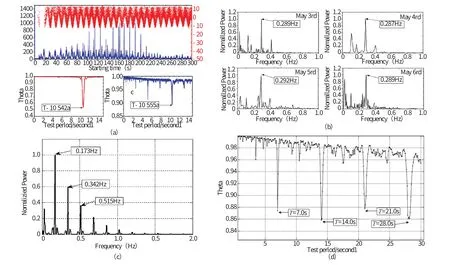
图4 云南天文台空间目标特征分析Fig.4 Space object characteristic analysis by Yunnan Observatories
4.2 红外波段激光测距
目前, 在空间目标激光测距领域, 国际上一般采用532nm 波段激光进行测距。 532nm 波段激光为可见波段绿光, 经过多年的发展关于532nm波段激光的光路调试, 相关器件的发展都比较成熟, 使用1064nm 近红外波段激光测距近几年刚开始发展, 该技术逐渐从合作目标激光测距向非合作目标测距发展。
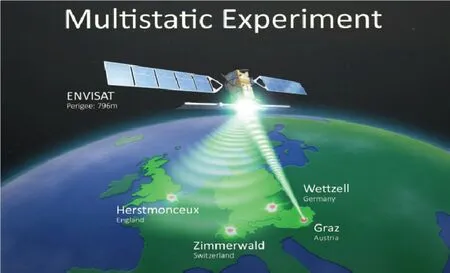
图5 欧洲多站联合测量实验Fig.5 European multistatic measuring experiment
相比532nm 波段激光, 使用1064nm 波段激光进行空间目标激光测距主要有以下几个优势:同等能量的1064nm 波段激光包含的光子数是532nm 波段激光的两倍, 通常光子数越多可以提高系统的测距成功率; 1064nm 波段激光比532nm波段激光的大气透过率更高; 在测距过程中, 太阳光中的1064nm 波段的背景噪声比532nm 波段的噪声低一个数量级。 目前国际上已有部分测站实现了使用1064nm 波段激光进行激光测距的技术, 包括对激光测距卫星[19]和月面角反射器阵列进行测距[34,35]。
2016 年初, 云南天文台使用1064nm 波段激光和超导单光子探测器, 针对合作目标实现了激光测距[19]; 随后, 经过系统优化, 2017 年云南天文台基于该实验系统实现了对空间碎片的近红外波段激光测距[31]。 2019 年, 中山大学与云南天文台合作建立了使用1064nm 波段激光的月球激光测距系统, 该系统对月面5 个角反射器阵列均进行了高精度的测量[36]。
4.3 白天激光测距
目前, 各激光测距台站对空间碎片进行激光测距一般选择在晨昏时段开展, 因为只有在晨昏时段, 低轨空间碎片被太阳光照亮并且地面台站的观测不会受到太阳光的直接干扰。 发展白天的空间碎片激光测距可以大幅提升台站对目标的监测时段, 获得时段分布更密集的空间目标测距数据, 这样可以提高对空间碎片的定轨精度、 监测效率。
为了提高对空间碎片监测的效率, 开展白天的空间碎片激光测距研究逐渐受到激光测距领域的重视。 近些年来, 多个激光测距台站、 科研单位开始进行白天空间目标激光测距相关技术的研究[37-41], 国内外也有不少激光测距台站实现白天的卫星激光测距, 但是, 白天的空间碎片激光测距直到2019 年才由奥地利Graz 站实现[13]。
5 结论
本文对空间碎片激光测距的发展进行了充分的调研, 阐述了空间碎片激光测距的诞生背景与发展意义, 回顾了国内外空间碎片激光测距技术的发展历程与重要事件。 通过调研国内外空间碎片激光测距应用研究领域的诸多公开文献, 总结了空间碎片激光测距应用研究的几大研究方向。另外, 根据空间碎片激光测距的发展方向和要求, 列举了多个该领域的技术发展趋势, 并就三个重点发展方向进行了介绍与分析。 总之, 空间碎片激光测距经过多年的发展, 在技术上取得了长足的进步, 在空间碎片定轨与监测领域发挥了重要作用, 在空间目标特征分析与空间环境研究等领域也开始发挥作用。 未来需要进一步提高相关的技术水平, 继续提高空间碎片激光测距的应用价值与科学价值。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
国际太空(2022年1期)2022-03-09
航天返回与遥感(2021年6期)2022-01-11
三联生活周刊(2016年22期)2016-05-27
电脑知识与技术(2016年7期)2016-05-19
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
现代电子技术(2014年16期)2014-08-20