激光空间碎片移除技术发展与展望
2021-01-15 06:48郑永超赵思思李同张景豪
空间碎片研究 2020年4期
郑永超, 赵思思, 李同, 张景豪
(1. 北京空间机电研究所, 北京100094;2. 中国空间技术研究院空间激光信息感知技术核心专业实验室, 北京100094)
1 引言
1.1 空间碎片现状及危害
空间碎片是人类探索和利用外层空间的产物, 是人类在进行外空活动时产生的各种废弃物及其衍生物, 包含失效航天器、 火箭体、 剩余燃料及气体、 航天器材料、 生活垃圾等。 随着各国空间技术的发展和空间任务的增多, 空间碎片目标与日俱增, 根据2020 年ESA 给出的信息[1],美国空间监视网(SSN) 维持编目的空间碎片数目约22300 个, 质量约8800t, 尺寸大于10cm 的目标数量约为34000 个, 尺寸介于1 ~10cm 的碎片约900000 个。
空间碎片对航天活动和发展构成了严重威胁[2]。 超高速撞击试验表明, 直径1mm 左右的铝球即可击穿卫星常用的蜂窝板并对其中设备造成严重威胁[3]。 对于尺寸1cm 以下的空间碎片, 主要施行卫星表面防护措施; 对于10cm 以上较大尺寸的空间碎片, 可以根据编目和预警采取规避措施; 但对于1 ~10cm 的空间碎片, 造成危害非常严重, 既难以编目又防护困难, 目前还没有找到更好的解决方案。 各类碎片危害如表1 所示。
空间活动的快速发展加剧了空间环境的恶化。20 世纪70 年代美国人Kessler 在进行了大量空间碎片数量预测研究后, 于1978 年提出空间碎片持续增加进而发生碎片联级碰撞的“凯斯勒效应”(Kessler Syndrome) 的解释, 并于1991 年对未来近地轨道(LEO) 区域空间碎片密度增长达到临界值导致近地空间无法使用的“Kessler 灾难” 做相关预测[4,5]。 NASA 后续对不同轨道区域内10cm 以上的碎片数量进行了预测[6], 结果如图1 所示。
截至2019 年, 人类共发射的航天器数量为9400 余颗, 随着微小卫星技术的进步, 国际上大规模低轨卫星星座呈现出爆发式态势, 航天器的发射数量成井喷式增长。 近几年各航天大国和商业公司相继提出了数量庞大的巨型星座计划, 如SpaceX 的“星链” 计划, 42000 颗星将覆盖350 ~1300km 的轨道区域; OneWeb 公司与波音公司计划发射上千颗星组成的大规模星座均分布在1200km 附近轨道高度上; 上述计划部分已在实施中, 也就是说“Kessler 灾难” 正在加速走来。 目前低轨的编目碎片数量占总数的75%左右, 700 ~1100km 的轨道区域内, 碎片平均密度为其他轨道区域密度的5 倍以上[7], 如图2 所示。 小卫星星座的部署分布同目前LEO 轨道空间碎片高密度区域高度重合, 不仅可能造成大量卫星在轨的碰撞失控, 还将因为该区域航天活动的密集导致空间碎片环境的进一步恶化。

表1 不同尺度空间碎片对航天器的危害及其防护措施Table 1 Hazards to spacecraft by space debris with different sizes and their protection measures
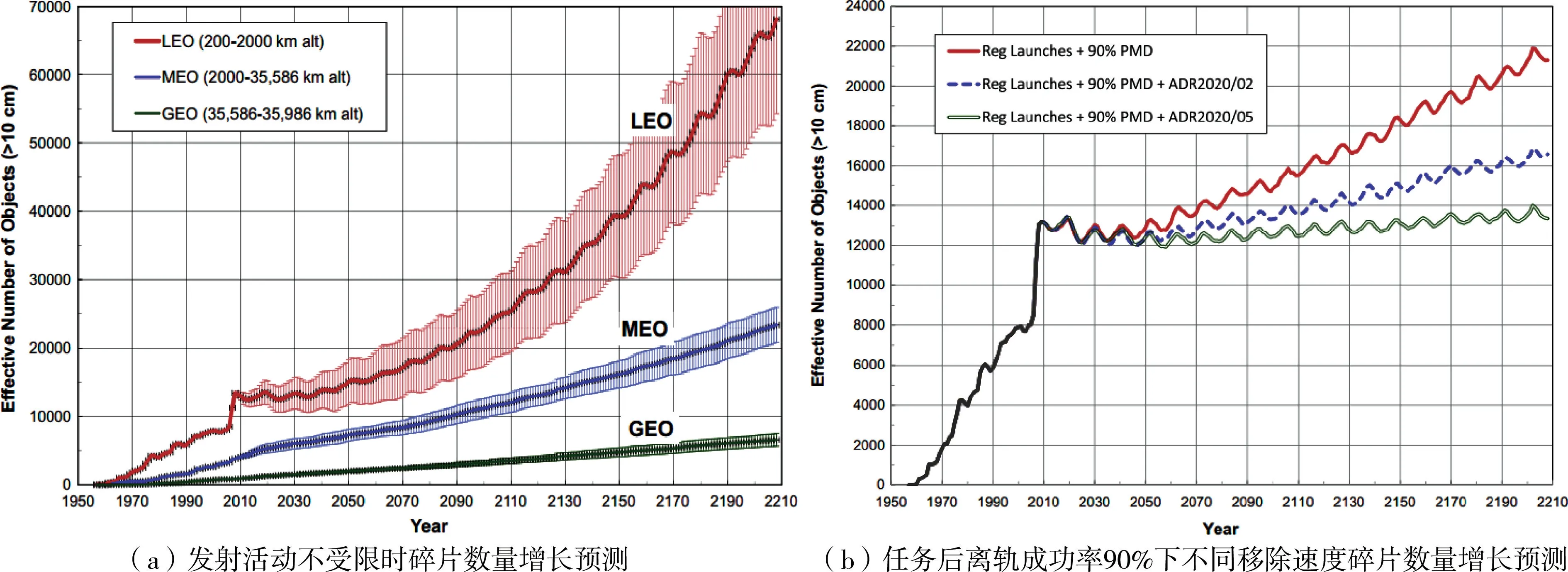
图1 各轨道区域10cm 以上碎片数量增长预测[6]Fig.1 Growth prediction of space debris larger than 10cm in different orbit areas in cases of space activities without limitation (left) and under a post-mission de-orbit success rate of 90% with different removal rates (right)

图2 LEO 区域编目空间碎片分布图[8]Fig.2 Catalogued space debris distribution in LEO area
1.2 空间碎片移除技术
应对空间碎片碰撞事件, 目前主要是基于碎片编目和碰撞预警, 采取航天器规避的方案。 但要从根本上解决问题, 就要对空间碎片实施主动移除。 目前, 已经提出的空间碎片主动移除(Active debris removal, ADR) 技术主要有增阻离轨移除技术、 电动力绳系移除技术、 捕获离轨移除技术、 激光主动移除技术以及离子束推移移除技术等, 每种方法都有其特点, 适用轨道、 清除目标、 作业保障等各有不同。
1.2.1 增阻离轨移除技术
该技术的原理是使用粘着泡沫、 膨胀式气球、 折叠阻力帆等用以增加碎片的大气阻力, 从而通过降低轨道速度来加速轨道衰减, 显著降低碎片的轨道寿命, 如图3 所示。 增阻离轨是非接触式清除, 相比接触式清除降低了清除难度, 但该技术需要针对不同特性碎片目标选取不同方案, 且泡沫、 气球等物易因操作不当导致产生新的空间碎片, 使得清除效率降低。 目前增阻离轨技术更多应用于星上离轨装置, 加拿大、 荷兰、英国等国均在近年来开展了相关的地面及在轨试验[9], 2010 年美国全球航天公司提出的薄膜增阻降轨装置(GOLD) 如图3 所示。
1.2.2 电动力绳系移除技术
其原理是使用空间拖船、 机械臂等对碎片进行抓取, 利用柔性系绳将一颗卫星或拖船与空间碎片连接在一起, 拖动其沿轨道在地磁场中运动,在绳上产生电动势, 形成稳定的电流, 利用洛伦兹力改变卫星速度使组合体减速离轨, 如图4 所示。该方法由于电磁场强的限制存在清除能力的限制, 目前只可应用于LEO 轨道碎片的清除, 且存在系绳易断裂和系绳难以释放等问题, 导致在轨技术验证仍不成熟[11,12]。 2016 年, 日本JAXA 开展的KITE 系绳清除在轨演示任务最终由于系绳难以释放的问题宣告失败。
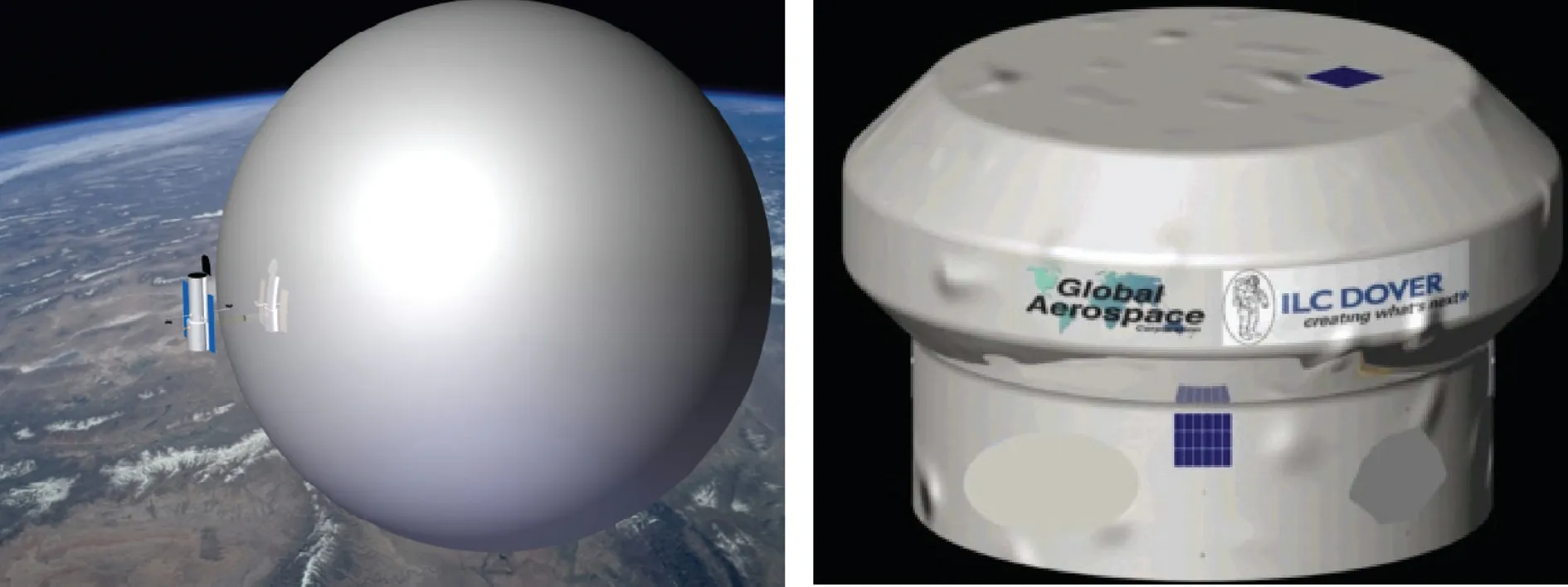
图3 GOLD 装置降轨概念图[10]Fig.3 GOLD orbit lowering concept graphs
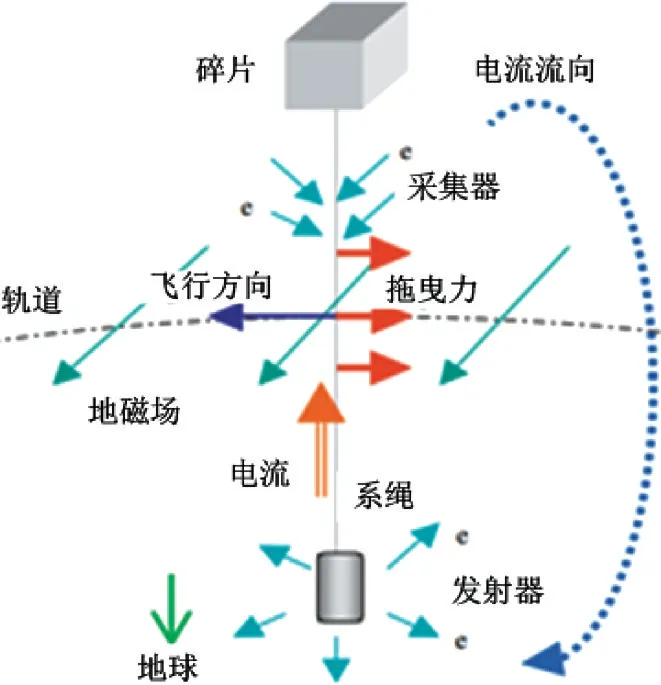
图4 绳系捕获法清除碎片原理图Fig.4 Schematic diagram of tethered capturing method for space debris removal
1.2.3 捕获式离轨移除技术
该技术的原理是由地面操控清除用航天器施行接触式清除, 在达到预定轨道位置后使用有效的抓捕方案固定清除用航天器及待清除碎片, 使得清除卫星与空间碎片进行直接接触从而对空间碎片产生作用力, 拖动碎片使之离轨从而达到降轨目的, 快速实现碎片主动清除。 该方法的具体抓捕方案较多也较为成熟, 目前可使用飞矛、 飞爪、 飞网、 机械臂、 弹弓等方式, 图5 为ESA 飞网抓捕的在轨演示图。
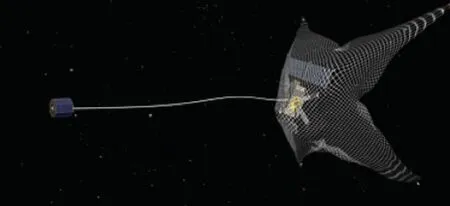
图5 飞网抓捕离轨清除碎片在轨演示图(ESA)[13]Fig.5 On-orbit demonstration of a net capturing space debris for deorbit removal by ESA
1.2.4 激光主动移除技术
激光主动移除碎片技术的原理有两种: 一是针对较小的碎片, 利用强大连续波激光照射使其温度升高至碎片熔点, 使碎片汽化; 另一种针对较大碎片, 利用高能脉冲激光束照射碎片表面,为碎片提供一定的速度增量来降低近地点高度,达到缩短碎片轨道寿命的目的。 激光主动移除技术的优点是操作简单, 响应快速, 可无限重复使用, 能进行远距离、 非接触清除, 成本低, 可以清除多种尺寸空间碎片; 劣势在于目前的技术能力有限, 技术成熟度不高。 激光主动移除技术根据清除手段不同又分为地基激光移除技术和天基激光移除技术, 图6 为天基高能激光移除碎片示意图。 从发展的观点看, 激光主动移除技术将是最有前景的方案。 因此, 也逐渐成为碎片移除技术研究的热点和重点。
2 激光空间碎片移除技术发展
2.1 地基空间碎片激光移除技术
激光主动移除空间碎片技术始于20 世纪80 年代末, 美、 德等国先后提出了使用强激光移除空间碎片的想法; 20 世纪90 年代, 德国航天研究中心Schall 等人[14]对激光器运行轨道、 激光器参数和激光光束传播等方面做了进一步系统研究, 提出用强激光清除空间碎片的理论, 并对天基激光站系统参数进行了初步设计, 提出了初步技术方案; 1996 年, NASA 推出了基于地基强激光移除空间碎片的ORION 计划, 并于2012 年公布了最新的研究进展[15], 显示他们的激光碎片ADR 技术已经处于关键技术攻坚阶段; 2014 年,Phipps 等[16]对使用激光光学系统降低低轨空间碎片的方案做了进一步研究, 表明了激光清除方案是唯一一个能够同时考虑小尺度和大尺度碎片的方案, 他们对地基移除方案做了模拟并讨论了其优势和劣势, 预估了大致的费用。 在国内,2009 年, 李明等[17]建成了脉冲式激光驱动微小碎片发射系统并开展了相应超高速撞击试验,对激光作用碎片特性和累积撞击效应进行了详细分析; 2016 年, 方英武等[18]通过分析脉冲激光与铝靶碎片的冲量耦合相互作用, 分析了冲量耦合系数与激光功率密度之间的定量关系,并分析了最优系数下实现地基移除低轨碎片的相关条件。 截至今日, 国外的地基激光空间碎片移除计划仍以美国提出的ORION 计划具有代表性, 其后改进的LODR 系统如图7 所示。 美国诸多学者在ORION 计划的推动下, 对地基激光移除空间碎片的概念、 原理和方案规划进行了一系列系统研究, 国内相关单位也跟进了该方面的研究, 进行了原理的论证以及地基激光移除碎片轨道模型的建立与分析, 并有相应移除方案策略的制定。
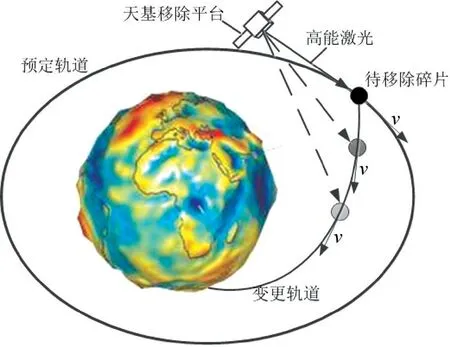
图6 天基高能激光移除碎片示意图Fig.6 Schematic diagram of space-based energetic laser debris removal
但由于大气层的吸收作用损耗较大, 且受到地理位置与作用距离影响, 使得地基激光移除碎片系统的工作范围和作用能力受限。 2017 年, 针对大气传输中的主要问题, 温泉等人[19]分析了大气湍流对地基激光方案的影响并建立了冲量耦合关系, 讨论了受大气湍流影响的冲量耦合系数变化与激光脉宽间的关系。 因为地基激光清除碎片方案存在的缺陷, 也有学者将研究重心转移到基于天基的激光移除空间碎片技术上。 2012 年起, NASA 也因大气传输受阻问题将重心从地基激光移除碎片计划转为天基激光移除碎片技术的发展。
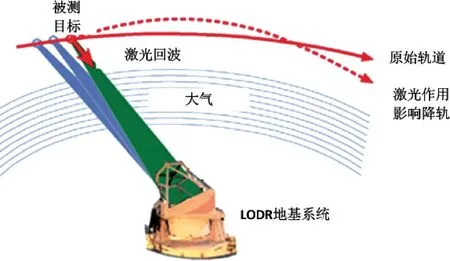
图7 LODR 系统示意图Fig.7 Schematic diagram of LODR system
2.2 天基空间碎片激光移除技术
天基激光移除手段不受大气传输的影响, 且没有折射、 散射等传播特性的影响, 可重复使用, 安全性高, 因此同地基激光移除手段相比,天基移除手段是成本更低、 机动性更高、 作用场景更多样的移除技术。
1989 年, Metzger 等[20]提出了将激光器安装在核动力宇宙飞行器或卫星上, 利用单脉冲氟化氪激光清除空间碎片, 这是早期的天基激光移除空间碎片构想。 近年来, 各国又重新将发展目光转向天基系统中, 美国、 德国、 日本相继提出了相应的天基激光移除碎片初期方案; 2013 年,Smith 等[21]提出了天基平台持续机动以提供高能脉冲激光持续作用空间碎片形成一种拖曳力的方案, 能够清理质量在200kg 以内的空间碎片, 并估算了清理所需要的时间; 2014 年, Phipps 等指出对使用激光光学系统降低低轨空间碎片的方案做了进一步研究, 表明了激光移除方案是唯一能同时考虑多尺度碎片移除的方案, 并在ORION 计划的基础上对地基探测跟踪系统进行了完善, 并提出了天基激光移除系统方案; 2015 年, 日本的Toshikazu Ebisuzaki 等人基于国际空间站上用于探测超高能宇宙射线的JEM-EUSO 超宽视场望远镜和光纤激光器提出了一套天基激光空间碎片移除系统。 各国提出的激光移除空间碎片计划方案见表2, 可以看出各国的计划方案由初期的天基方案逐渐转向建设地基方案, 最终转向天基为主的天地基联合方案。

表2 激光空间碎片移除计划表Table 2 Laser space debris removal programs
2.3 空间碎片监视与激光探测和测量
对于空间碎片激光移除技术, 空间碎片的监视、 编目以及目标特性的探测测量是基础、 前提和保障。 空间碎片编目是在空间目标编目坚实的基础上发展的, 激光测量由于具有更高的分辨率, 在空间碎片高精度测定轨与目标特性测量识别方面的优势愈加显现, 空间碎片激光测距精密定轨和特征测量已经成为空间碎片监视编目的重要组成。
2.3.1 空间目标雷达监测系统
目前许多国家或组织建立了包含激光雷达设备的空间目标监测系统, 如美国的空间监视网(SSN)、 俄罗斯的空间监视系统(SSS) 等, 空间目标监测以地基为主、 天基辅助, 主要目的是空间目标的轨道编目。 各个监测网相对较为独立, 均含有针对目标进行监测、 跟瞄、 定轨的能力。 SSN 是目前世界上最大的空间态势感知网,如图8 所示, 近年来为进一步提升目标探测识别系统, 其在地面升级部署了新型太空篱笆系统并在LEO 部署了新的天基监视系统用以探测GEO轨道目标, 大大提高了对空间碎片等微小目标的探测能力以及对目标的探测精度, 美国的新型相控阵篱笆系统是目前现有最先进的低轨目标监测设施, 可以监测高度为400km 的1cm 空间目标,编目维护能力10 万以上[22]; SSS 主要由地基雷达系统和光学系统组成, 目前, 其雷达系统的建设主要以增强对目标的监测跟瞄能力和对更微小目标的探测识别能力为目的, 提高整体探测识别与跟瞄能力, 尤其是对微弱目标的识别及编目;欧洲正积极开展空间目标监视系统的建设及联网, 目前基于法、 德等国现有的雷达网络, 建设了一体化欧洲空间目标监视系统(ESSS), 可对低轨碎片目标进行探测, 探测能力达到2cm 级;目前国内的激光雷达系统也通过近年来发射的诸多激光雷达载荷部署开来。
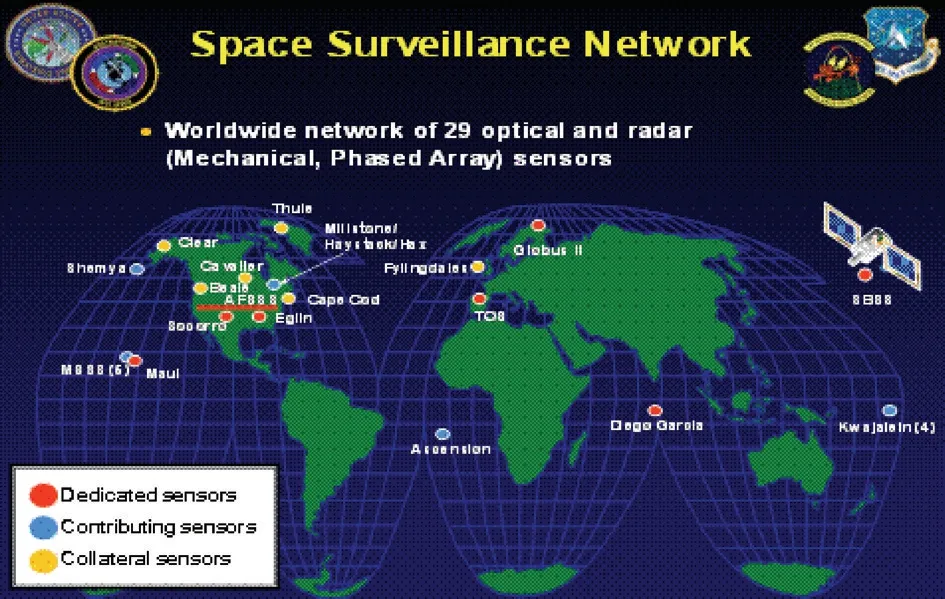
图8 SSN 系统示意图Fig.8 Schematic diagram of SSN system
2.3.2 空间碎片激光测距系统
空间碎片激光测距技术(DLR) 起源于卫星激光测距技术(SLR), 目前多数卫星激光测距站都加入了全球卫星激光测距服务系统网(ILRS),其观测数据和轨道预报数据都是开放式数据。 从2006 年8 月起, 国际激光测距网开始使用综合预测格式(CPF) 星历预报, 但现在参加全球联测的空间目标多为合作目标, 非合作目标的激光测距一般为单站数据, 相关研究仍处于起步阶段。激光测距技术相较于光学成像跟踪和雷达观测技术有其更明显优势, 其光束更窄, 方向更集中,能量集中度和功率更高, 单位亮度更强, 在非成像目标探测中可有效利用; 测距精度较其他技术高出1 ~2 个数量级, 当天空背景对目标可视化成像的背景亮度过高导致难以成像观测时, 也可以利用激光测距技术进行探测, 激光测距对于定轨精度提高发挥了重要作用。
近年, 利用空间碎片激光测距技术进行精密定轨的方案得到广泛认同和大力发展。 早在2000 年, 澳大利亚EOS 公司即在堪培拉Stromlo激光测距站进行激光测距探测碎片方面的研究, 如图9 所示; 2002 年, EOS 公司在华盛顿第13 届国际激光测距会议上发表了其研究进展[23], 首次提出了空间碎片激光测距(Debris Laser Ranging,DLR) 的概念, 并利用Stromlo 激光测距站望远镜和高能激光器实现了对大于1000km 距离下15cm量级空间碎片的激光测距, 近年来该测站经过不断技术更新, 测量的目标最小尺寸已达到5cm[24]。

图9 澳大利亚Stromlo 空间碎片激光测距站Fig.9 Australia’s Stromlo space debris laser ranging station
奥地利科学院空间研究所Graz 站, 在空间目标激光测距方面已经有近40 年的历史, 由于数据的高可靠性和高精准性, Graz 卫星激光测距站被ILRS 列为全球五个核心站之一, 同时被视为世界上最为准确的台站之一, 如图10 所示。 2003 年,世界上首次实现2kHz 空间合作目标激光测距;2012 年, 开发了新型专业化单光子探测器, 首次对空间碎片物体漫光反射的光子进行了测量;2015 年, 团队又在原有系统上加装了一套新的单光子光度曲线记录系统, 开展空间目标位姿测量研究; 2019 年该台站实现了500kHz 重复率卫星激光测距, 在目标观测数据密度和精度方面有了大幅度提高。 该台站组织或参与了多项空间碎片目标联测试验; 自2013 年起, Graz 站开展了多次双基站、 多基站试验[25]; 2019 年, 奥地利科学院空间研究所Graz 站与北京空间机电研究所就空间碎片姿态测定技术开展了合作研究, 利用激光测距设备和单光子光度测量设备分析GLONASS星座失效卫星的旋转周期演化与分布, 对火箭残骸的旋转姿态进行研究[26]。

图10 奥地利Graz 激光测距站Fig.10 Austria’s Graz laser ranging station
中国SLR 网成立于1989 年, 由上海站、 长春站、 昆明站等台站组成。 上海天文台佘山观测站建立了大能量Nd:YAG 测距试验系统, 开始非合作目标空间碎片的激光跟踪和测距试验, 并多次获得火箭残骸的漫反射激光测距数据; 2013年, 上海天文台建设了1.56m/60cm 双望远镜激光测距实验系统, 联合开展空间目标激光测距技术研究, 后续实现了碎片目标500 ~2600km 的测量距离, 在低轨对于空间目标的测距能力优于0.5m[27]; 2016 年, 长春人造卫星观测站利用60cm 卫星激光测距系统实现了高重频空间碎片常规探测, 测距精度可达1m[28]; 2017 年, 云南天文台研制了53cm 高重频双筒望远镜, 具有对低轨米级空间碎片的探测能力[29]。
3 空间碎片激光移除科学问题与关键技术
空间碎片激光移除技术是未来最有前景的碎片清除技术, 这是目前业界的共识。 空间碎片激光移除方案历经地基、 天基几度变更, 目前看天基实现的可能性更高。 在这个过程中, 相关的理论和技术日趋成熟, 部分关键技术依托于空间目标监视等已进行在轨试验。 目前的技术链条中,激光光源是短板。 作为激光移除的前提和保障,目标的监视编目以及目标特征, 依然依靠强大的地面网络作支撑, 但天基观测发展迅速, 天地协同、 以地为主的格局没有变化。
3.1 激光对空间碎片移除的作用机理机制
激光移除空间碎片的原理是明确的, 各种工况下的实验也验证了其可行性。 但要进行工程设计, 尤其天基移除要实现高的效能和效率, 还需要对其作用机制和机理进行定量定性的描述和刻画, 包括激光作用于空间碎片的力学过程、 能动耦合、 多物理场转化; 激光作用空间碎片的空间、 运动、 姿态效应; 激光作用空间碎片的时间、 频域、 形貌影响等等, 这些科学问题和关键技术的突破对于激光移除的方案、 策略、 效能至关重要。
激光作用在碎片目标的效果主要由激光的作用距离和相对作用位置即作用角度决定, 空间碎片目标形状不规则且旋转姿态各异, 实际移除过程中无法将其看为规则目标或点目标, 在不同相对位置对不同角度、 不同可视面元的作用下可能得到的作用效果也不相同, 明确任一激光作用情况的效果是保证降轨有效的前提。
激光入射至不同碎片目标, 目标会在极短时间内吸收激光能量进而能量转化产生复杂相变,不同碎片目标表面物质在不同条件下的吸收机制并不相同, 由此产生的机械能与耦合反冲冲量特征也就不同, 该作用的效能与目标的冲量耦合特性有关, 取决于其冲量耦合系数, 即指复杂能量转化过程的动量系数, 对其作用能量转化过程及冲量耦合特性的研究, 最终目的是得到任一作用条件下的精确速度增量, 准确表示激光作用的特征。
3.2 目标特性识别研究
空间碎片目标特性的探测与测量关系激光碎片移除的技术路线和系统方案。 对目标特性的描述要素包括运动特性、 几何特性、 材料特性、 尺寸特性以及光学特性等。 只有准确掌握目标特性, 才能对移除目标、 移除策略、 移除过程、 移除系统、 移除效果等作出正确研判, 如何获取尤其是在轨快速获取目标特征, 是激光空间碎片移除的系统设计和过程实施的关键保证。
碎片目标形状姿态各异, 表面材料不尽相同, 轨道位置导致的相对观测角度变化及由于太阳光压和大气阻力造成的目标碎片旋转轴指向缓速变化等的不同, 都构成每一个碎片的综合目标特征信息且各不相同。 以激光移除碎片为研究目标时, 这些信息即为先验信息。 获取准确先验信息难度的不同是造成激光移除空间碎片任务难度不一的重要因素。
对于可成像的明显尺寸空间碎片, 需要对先验信息进行准确认知, 对实时变化的目标特性进行追踪监测和时序预报, 必要时可建立完备先验信息数据库, 以便更加系统地完善和利用多维度典型目标特征。
对于难以成像观测的空间微小碎片而言, 特性识别难度更大, 目前的研究策略是将这些碎片目标典型化, 筛选有代表性和单一性的先验信息进行假定, 通过与其他条件下的光学观测信息进行比对, 反演相对更准确的目标特性。
3.3 空间碎片探测与测量技术
基于空间碎片的探测与测量信息, 可以对空间碎片目标甄别与选定、 目标跟瞄与定位、 移除导引与评估、 移除策略与过程控制等进行构建,是激光空间碎片移除能力和效果支撑的基础所在。
对被测碎片目标进行测量的目的是获取更多的准确先验信息, 支持预期激光作用效果的实现。 对于可视化的明显碎片目标, 现有的测量技术包括图像识别和碎片激光测距(DLR), 常用的图像识别方法主要包括双目视觉测量、 图像匹配、 激光扫描、 三维点云重构等, 这些方法大都基于图像进行筛选, 提取图像中的特征信息以获取碎片目标的先验信息, 部分方法如双目立体视觉测量更是不需要预先已知先验信息, 这些方法可以较为准确全面地提供可视化碎片的部分目标特性。
对于非成像微小碎片目标, 现有的测量技术主要包括光变探测(LC) 和空间碎片激光测距(DLR)。 从原理上说, 碎片由于自身的旋转导致观测光度信息和测距残差产生了周期性变化, 因此对碎片目标进行光变和测距残差分析是提取与碎片目标旋转运动相关特征参数的有效手段。 基于这些方法进行多维度分析研究, 力求从有限的信息中更好地提取空间目标姿态及目标光学特性等信息。
3.4 高效激光光源研制
高效、 高能、 高光束质量的激光器对激光移除系统至关重要。 激光光源甚至决定了系统的能力。 激光器的研制属于技术攻关范畴, 受到承载平台的空间、 能源、 环境等多方面严格约束, 同时又要满足基于目标特征的系统能力要求。 其核心在于效率, 电光转换、 光热转换、 力热耦合、热排散与热管理等是关键环节。
激光器参数选取涉及多参数, 如传输特征参数、 冲量耦合参数、 波束能量参数等, 激光器研制的优化目的是在同样发射能量的基础上, 作用在目标合适角度下获得最大的速度增量。 考虑激光远场是否覆盖目标碎片, 对其冲量耦合机理进行分解, 确定近场功率密度, 根据总冲量的数值确定激光器重频和平均功率并根据具体特征需求确定合适的激光器参数指标。 激光器的选取与研制是综合了多维度参数的考虑及方案设计, 需要不断优化完善才能满足激光移除需求。
3.5 任务规划与系统设计
对于空间碎片激光移除, 需要从顶层进行任务规划和系统设计, 要充分理解任务、 对任务进行分解、 深入研究移除策略, 包括目标甄选、 碎片降轨路径规划、 激光驱动策略等较精细的移除策略分析, 并根据空间碎片探测跟踪、 烧蚀驱动和变轨清除过程对清除系统进行设计, 明确各分系统指标。 在此基础上, 有计划、 有步骤地实施空间碎片移除在轨演示验证, 不断提升技术成熟度, 逐步推动工程化应用和实施。
天基激光移除空间碎片的具体任务规划包括: 目标发现与锁定, 目标甄别与威胁判识, 移除策略, 移除系统资源投入, 移除目的、 目标、阶段, 移除效果及风险控制等。 首先利用天地基协同平台在合适的探测水平下发现、 识别并锁定被测的空间碎片目标; 将碎片信息传输给天地基协同平台的各控制系统与控制组件, 进行多方位多时效跟踪瞄准, 获取稳定的碎片目标运动规律并进行一定程度的预报; 获取可成像碎片的图像信息或非成像碎片的光学周期变化信息, 通过遥测传输或地面站传输进行整理, 对数据分析获取相应的碎片姿轨及目标特性信息, 与地面特征信息数据库进行比对确定目标的具体特征信息; 整个系统实现精准跟瞄后, 通过选择地面遥控指令启动合适范围内的可用高能脉冲激光载荷、 发射新的搭载高能激光器航天器到达预定轨道以及地基合适范围内强激光器瞄准等不同方案, 对空间碎片进行照射实现降轨需求; 根据碎片尺寸选择合适的激光移除方案, 对于大尺寸碎片可进行多次多圈降轨, 逐步满足需求。
4 发展展望与建议
空间环境的不断恶化是全人类面临的挑战,主动移除是应对挑战的关键手段, 激光移除方案是最有发展前途的方案。 经过多轮次的研究论证, 天基方案优势明显, 建议发展激光移除方案以地基观测网、 天地协同观测为支撑, 基于天基平台实现多尺寸、 多天域空间碎片的高效移除。天基移除的主要技术、 基础理论等经过国内外40余年探索, 均有一定的积淀和基础, 技术链条短板在于激光光源。 可以说, 目前天基激光空间碎片移除已具备了开展有限目标的在轨试验的基础。
空间环境治理是大国责任, 空间碎片移除是国际研究热点。 目前不仅国际组织、 国家组织,而且商业航天也加入其中, 空间碎片已成为技术制高点和竞争点, 这其中不仅有对航天技术发展的推动、 空间安全的需要, 也蕴含巨大的商业利益。 我国经过多年研究, 已有较好基础, 建议基于“先易后难, 基础研究、 关键技术、 系统规划, 统筹推动, 分步实施, 顶层设计, 探测先行” 的原则, 推动空间碎片激光移除在轨验证。空间碎片激光移除技术正处于一个加速发展的历史机遇期, 我们有望与美、 日、 欧等国家或组织在该高地一竞高低, 实现局部超越, 这也是航天强国建设赋予我们的责任和使命。
猜你喜欢
军事文摘(2022年17期)2022-09-24
现代仪器与医疗(2022年1期)2022-04-19
国际太空(2022年1期)2022-03-09
国际太空(2022年1期)2022-03-09
计算机时代(2016年12期)2017-01-14
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
电脑知识与技术(2016年7期)2016-05-19
儿童故事画报·智力大王(2016年3期)2016-05-05
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31