空间碎片激光测距技术及应用
2021-01-15 06:49李恭强刘静程昊文
空间碎片研究 2020年4期
李恭强, 刘静, 程昊文
(1. 中国科学院国家天文台, 北京100101;2. 国家航天局空间碎片监测与应用中心, 北京100101)
1 引言
1957 年10 月4 日, 苏联发射了世界上第一颗人造地球卫星, 人类自此迈入了太空时代。时至今日, 人类的航天事业已发展了60 余年,取得了一系列伟大的成就, 但在我们不断探索浩瀚宇宙的进程中, 空间环境也变得日益拥挤复杂, 不断增多的空间碎片与部署的巨型卫星星座将造成在轨航天器碰撞风险急剧增加, 对在轨航天器的安全运行构成现实性威胁, 空间碎片已逐渐成为影响人类航天活动和外层空间可持续发展关键因素, 是国际社会高度关注的热点和重点问题[1,2]。
地球附近空间碎片数量在迅速增加, 对在轨或今后发射的航天器及航天任务产生的影响日益严重, 增加了对载人航天的潜在危害[3]。 随着空间碎片越来越被重视, 各国都在大力发展和研发多种观测技术, 以实现对空间碎片的有效监测,精确测定运行轨道, 及时发现空间危险交会信息, 为航天器规避机动提供数据支持。 建立可跟踪的空间碎片动态数据库, 开展空间碎片环境演化模式研究。 激光脉冲信号以其波长短、 方向性好、 单色性强、 光线在大气中传播导致的误差对测距结果影响小和抗干扰性强的优势, 使激光测距成为目前空间碎片测轨精度最高的主动式光电探测技术。
空间碎片为非合作目标, 其表面为漫反射,对空间碎片进行激光测距难度要远大于安装有角反射器的合作目标, 主要难点在于空间碎片反射回波信号非常微弱。 地面空间碎片激光测距技术是通过地面站向空间碎片发射高功率、 准直性很强的激光束, 进行碎片测量, 测距精度一般可达到分米级, 高于目前光电望远镜和微波雷达系统测量精度1 ~2 个数量级[4]。 因此, 利用激光观测数据, 也可以实现对微波雷达系统高时效观测系统的标校、 对光电望远镜系统目标测定轨结果的检核, 开展多站联合激光观测, 提高碎片轨道测量精度, 对空间碎片危险交会研判、 识别编目、轨道检核等具有不可替代的作用[5]。 本文介绍了空间碎片的概况及其危害, 总结了激光测距的发展历程, 阐述了激光测距技术原理及其系统构成, 并详细分析了空间碎片激光测距探测能力及影响探测精度的误差来源。
2 空间碎片现状及危害
2.1 空间碎片来源
空间碎片是指在轨运行或再入大气的无功能人造物体及其残块和组件, 航天器发射过程中产生的没有入轨的人造物体不计算在内。 空间碎片主要来源包括: (1) 遗弃的航天器和运载火箭残骸。 自1957 年苏联第一颗人造卫星发射以来, 全世界共进行了6000 余次航天发射, 将8000 余个航天器和近6000 个运载火箭末级送入地球轨道,目前仍在轨的遗弃航天器数量已超过5000 个;(2) 航天器爆炸和碰撞解体碎片。 迄今为止, 近地空间发生了大约200 多次爆炸和碰撞解体事件,产生的碎片数量占碎片总量的50%以上; (3) 在轨操作产生碎片。 航天器在轨操作过程中会产生碎片和脱落物, 如“一箭多星” 发射时的卫星支架、 航天员的生活垃圾和丢失的工具包、 相机及望远镜镜头盖等; (4) 固体火箭点火产生燃烧物。 航天器使用的固体火箭点火上千次产生的三氧化二铝熔渣, 目前数量已达千万量级[1,2]。
2.2 空间碎片数量剧增
随着各国航天事业快速发展, 空间碎片数量增长迅速, 大于10cm 的碎片数量已经超过20000个, 如图1 所示大于1cm 的碎片数量超过90 万个, 大于1mm 的碎片数量更是数以亿计, 同时世界各国在巨型卫星星座领域迅猛发展, 按照当前计划, 未来全球将部署十余个卫星星座, 共计近6 万颗卫星, 使我国航天器的安全运行面临着严重威胁。 此外, 太阳系内高速运转的近地天体迫近地球的事件也时有发生, 在空间碎片和近地天体威胁下, 人类航天活动及其可持续发展将面临巨大挑战[3]。
空间碎片围绕地球运动, 如果对大于10cm的空间碎片拍张“快照”, 就可以看到紧靠着地球的区域以及在地球同步地球轨道附近空间碎片特别密集。 据统计, 在2000km 高度以下的LEO轨道、 约20000km 高度的MEO 轨道和约36000km高度的GEO 轨道区域有三个明显数量峰值, 这正是人类航天活动的密集区。
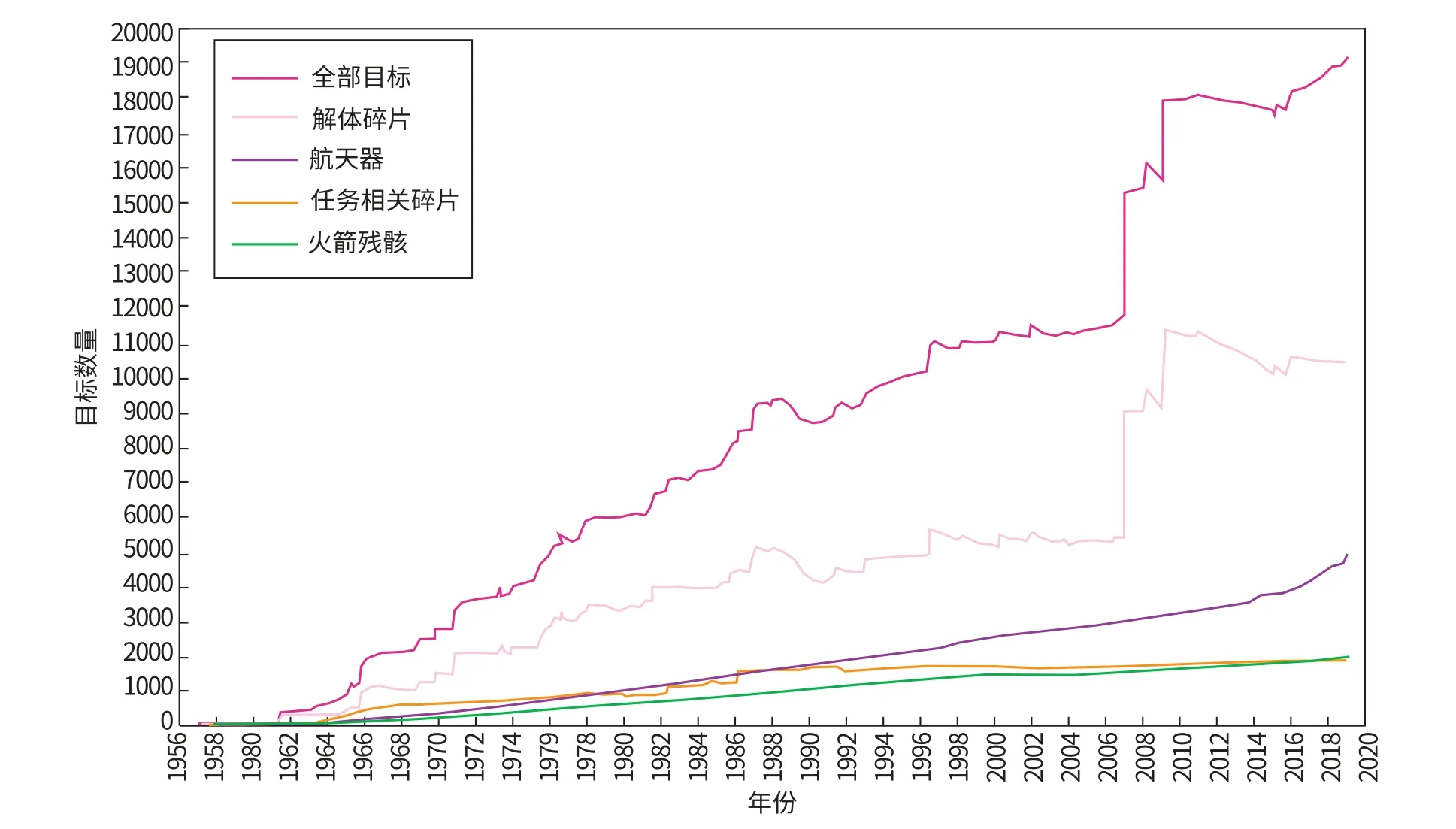
图1 1957 年至2020 年空间物体数量变化趋势图Fig.1 Variation of number of space objects from 1957 to 2020
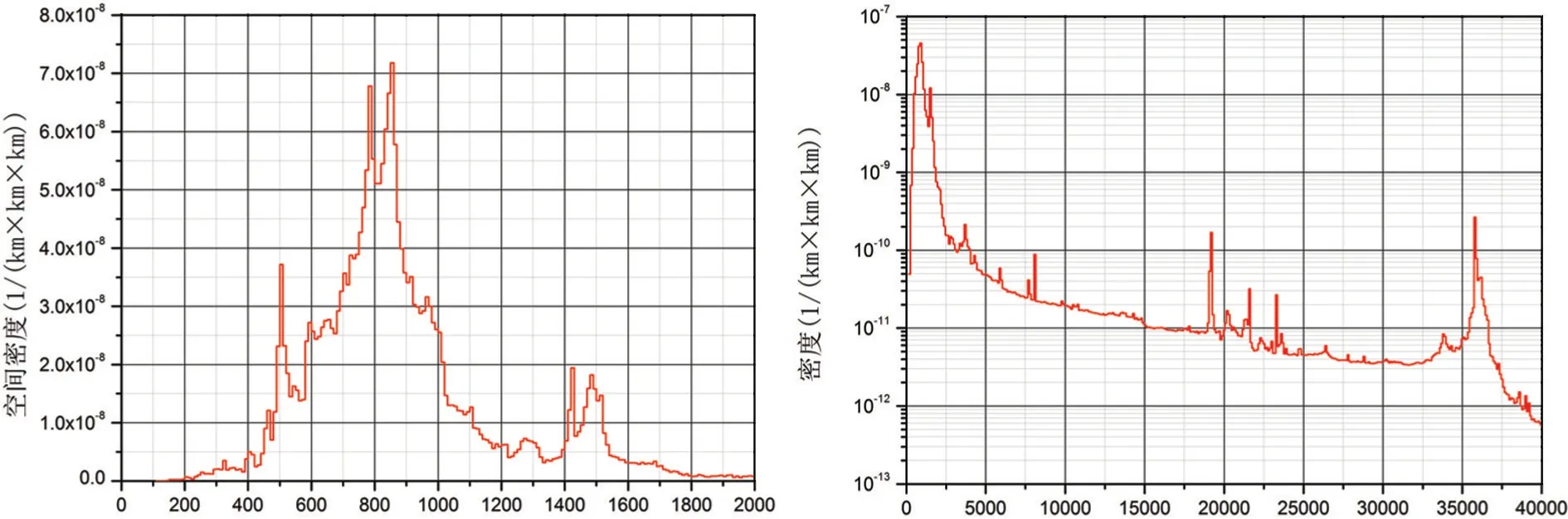
图2 空间碎片密度分布Fig.2 Space debris density distribution
2.3 碎片撞击事件频发
大量碎片在卫星常用轨道上密集运行, 使得碰撞解体等空间事件频发, 2019 年我国在轨航天器与空间碎片危险交会事件就多达300 余起。
空间碎片和航天器以超过7.9km/s 的速度围绕地球高速运动, 相互撞击的平均相对速度可达10km/s 以上。 尺寸大于1cm 的空间碎片撞击可导致航天器彻底损坏。 2013 年, 厄瓜多尔立方体卫星飞马座与苏联火箭残骸相撞, 导致卫星失效。2011 年6 月12 日, 我国北斗导航星座IGSO -2卫星太阳电池阵损失两个电路, 结论确认卫星在轨受到小碎片撞击。 2009 年2 月11 日, 美国商业通信卫星铱星33 和俄罗斯废弃的宇宙2251 卫星相撞, 相对速度达11.6km/s, 产生2000 多个空间碎片, 引起国际社会强烈反响。
根据统计, 在轨航天器与空间碎片距离小于100m 的危险交会每周平均为80 次, 我国卫星遭遇的危险交会平均每周6 次以上, 随着未来巨型星座的相继部署, 碎片碰撞事件将更加频繁, 航天员的空间活动和航天器的在轨运行安全受到严峻挑战。
3 空间碎片激光测距技术发展现状
1960 年, 美国研制了第一台红宝石激光器,证实了激光具有远程测量的能力。 经过几十年的发展, 激光测距技术在各方面都有了很大的进展。 世界上多个国家发展了空间碎片激光测距技术, 如美国、 澳大利亚、 法国、 奥地利、 俄罗斯、 波兰以及中国等[8,9]。 1998 年, 国际激光测距服务组织(ILRS) 成立, 组织国际联合观测、加强合作和协调, 推进了激光测距技术的发展。
3.1 国外发展现状
美国1994 年在第9 届国际激光测距会议上称其位于新墨西哥州的激光测距望远镜对空间碎片的探测距离可达到1000km。
澳大利亚光电系统公司 (EOS) 2002 年公布, 其Stromlo 激光测距望远镜, 可探测到1200多公里轨道高度的15cm 大小的空间碎片。 所采用的望远镜口径为76cm, 激光波长为532nm, 脉宽为ns 量级[7]。 2004 年, 澳大利亚利用口径为1.8m 的激光测距望远镜, 实现了距离1000km处, 大小为10cm 的空间碎片的激光测距探测,提高了测距能力, 其激光器功率为100W[8]。
法国Grasse 天文台激光测距望远镜2012 年成功实现了距离1700km 处空间碎片的探测, 所用望远镜口径为1.56m[10,11]。 2016 年, 法国Grasse天文台, 利用平均功率3W、 波长1064nm 的激光测距望远镜实现了激光测月, 验证了1064nm 激光测距的优势[12]。
奥地利激光测距设备2015 年实现了对3000km 距离处, 0.3m2空间碎片的激光探测, 其激光波长为532nm, 重频1kHz, 功率25W[13]。
3.2 国内发展现状
上海天文台2008—2010 年在国内多次进行空间碎片激光测距实验, 均成功探测到空间碎片,探测距离从最初的900km 提高到后来的1200km,测距精度从最初的1m 提高到80 ~100cm。 2018 年上海天文台利用合作单位激光测距望远镜开展小尺寸空间碎片激光测距试验, 望远镜口径为2m, 激光功率60W, 实现了对1600km 处, RCS 为0.05m2(编号01520) 空间碎片的有效探测[9,14]。
云南天文台分别在2008 年、 2010 年、 2011 年开展了数次空间碎片激光测距观测实验, 并成功探测到多个碎片的回波信息, 得到空间碎片精确测距数据。 其使用的激光测距望远镜参数为: 望远镜口径1.2m, 为收发共光路测距系统, 激光器功率45W, 重复频率10Hz, 脉冲能量4.5J, 激光波长532nm[15,16]。 2017 年, 云南天文台对系统进行扩展, 进行了1064nm 波长的空间碎片激光测距试验, 并获得成功[17]。
中科院国家天文台长春人造卫星观测站, 利用实时时间偏差修正、 目标闭环跟踪、 激光出射方向控制、 预报实时修正等技术, 建立了空间碎片激光测距系统, 实现了高重复频率空间碎片常规观测[6]。 2014 年, 进行了空间碎片激光测距实验, 并获得成功, 所用设备配置参数为: 激光功率60W, 重复频率500Hz, 波长532nm, 望远镜口径60cm。 利用该设备在26 个观测日里获得466圈观测数据, 其中晨昏数据26 圈, 观测高度角范围19° ~87°, 测距精度可达1.0m (RMS), 测距范围450 ~1800km, 观测的雷达散射截面(RCS)最小可达0.9m2, 成功实现了对空间碎片激光测距数据的获取[18]。
4 空间碎片激光测距技术原理及系统组成
4.1 激光测距工作原理
空间碎片激光测距的原理是通过精确测定激光脉冲从观测站到空间碎片的往返时间间隔(t),从而算出观测站至空间碎片的距离(R), 则R 和t 的关系式为: R= (1/2) ct, 其中c 为光速。 激光测距系统通过望远镜激光发射系统, 向空间碎片发射激光束, 开展空间碎片激光测距。 地面计时系统记录激光发射时刻, 光子探测系统探测从空间碎片返回的信号, 并由地面计时系统记录回波时刻, 根据激光发射时刻和接收时刻差, 获得空间碎片高精度距离信息。
原理看似简单, 但实现起来却非常困难。 对于空间碎片, 由于不带有激光角反射器, 对入射的激光束只能进行表面漫反射, 仅有极少部分的激光信号能返回到地面观测站, 测量难度相比带有激光角反射器的空间目标要高很多。 对空间碎片开展激光测距, 高光束质量、 高功率激光器、高稳定跟踪望远镜系统、 高效率激光发射及接收系统、 高效率低噪声光子探测器等是必要的, 这样才能满足对小尺寸空间碎片激光回波信号探测, 进行有效激光测距。 激光测距技术与一般光学测距技术和雷达测距手段相比, 具有对电磁干扰不敏感、 抗干扰能力强、 测量精度高等优点。
4.2 激光测距系统组成
空间碎片激光测距系统主要组成由望远镜子系统、 高功率激光器子系统、 光子探测与精密计时子系统、 测距控制与数据处理子系统等。 空间碎片激光测距系统各子系统主要功能如下:
(1) 望远镜子系统是激光测距系统的主要执行子系统, 在测距控制子系统的指令下完成目标的引导、 捕获跟踪, 同时实现激光脉冲的发射和激光回波的接收。
(2) 高功率激光器子系统作为激光测距系统的发射光源, 是系统中的核心部件, 用于产生稳定的、 高质量的大能量激光脉冲信号。 高光束质量和窄激光发散角, 能保证激光束能量的均匀性和高能量密度, 使得较多的激光能量被空间碎片反射回地面站, 提高测量测成功率和测距精度。
(3) 光子探测与精密计时子系统用于接收从空间碎片返回的微弱激光回波信号, 精确测量激光脉冲从地面站到空间碎片间的往返时间, 从而得到精确的测距信息。
(4) 测距控制与数据处理子系统是空间碎片激光测距系统控制枢纽, 是连接激光测距系统各组成部分的纽带。 各个子系统在激光测距控制的统一协调下按严格时序协同开展工作、 密不可分, 以完成对空间碎片台站预报、 精密跟踪、 激光发射瞄准、 回波信号探测接收、 数据采集显示存储及预处理等工作。
5 空间碎片激光测距探测能力分析
5.1 激光测距能力分析
激光雷达测距方程是评估空间碎片激光测距能力的基础。 空间碎片激光测距雷达方程如式(1) 所示:
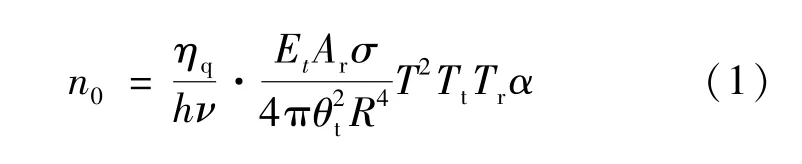
式中: n0为测距系统可接收到的平均光电子数;v 为激光频率; ηq为回波光子探测器探测效率; h为普朗克常数6.6260693 ×10-34J·s; Et为激光脉冲能量; Ar为接收系统有效面积; σ 为空间碎片横截面积; θt为激光光束发散角; R 为空间碎片距离; T 为大气透过率参数; T2为双程大气透过率;Tt为发射系统效率; Tr为接收系统效率。
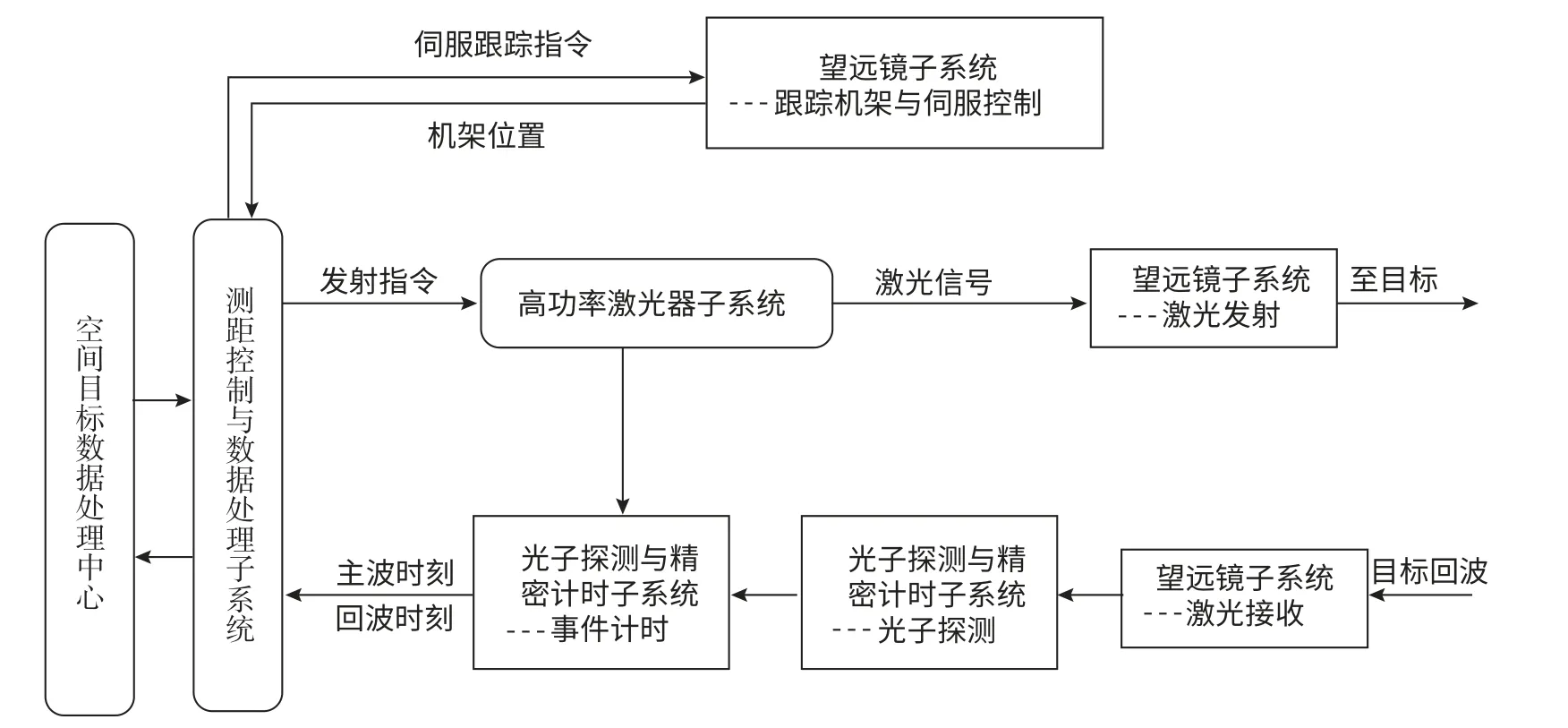
图3 空间碎片激光测距系统流程图Fig.3 Workflow of space debris laser ranging system
激光回波信号需经过光子探测器的接收, 才能转化为电信号, 继而被测距系统识别。 光子接收器的光敏面产生光电子的光电效应服从泊松分布。 按照泊松分布, 平均光电子数为n0时, 发射n 个光电子的概率如式(2) 所示:

对于单光子探测器, 产生一个及以上的光电子概率如式(3) 所示:

对于激光发射频率为N =P (1)·f, 则每秒钟激光回波光子数如式(4) 所示:

对于空间碎片激光测距信号探测, 每秒钟达5 个及以上即认为目标成功观测到, 即目标测量成功的判断阈值。
由于在光学区, 目标的雷达散射截面积RCS与目标尺寸r 的平方成正比RCS∝r2。 而根据激光雷达方程, 可以看出可探测目标的RCS 与距离R 的四次方成正比RCS∝R4。 那么可以得出激光测距设备可探测碎片的尺寸与距离的平方成正比r∝R2。
5.2 望远镜跟踪性能对激光回波影响分析
地面站向空间碎片发射出去的激光束能量分布服从正态分布, 激光到达目标处, 击中目标存在一定的概率。 此概率与激光发散角和望远镜跟踪误差的比值有关, 该比值代表了正态分布中随机变量σ 的倍数。 假定望远镜跟踪误差符合高斯正态分布, 图4 给出了激光发散角(半角) 与望远镜跟踪误差不同比值时, 激光击中目标的概率变化。 由图4 可知, 比值越大, 激光击中目标的概率越高。
激光雷达方程所计算的激光回波数是假定望远镜无跟踪误差情况。 实际测量中, 望远镜跟踪系统总有一定的跟踪误差, 也必然给探测概率产生一定的影响。 由于存在跟踪误差, 在发射出去激光击中目标情况下, 其接收到的激光回波数比无跟踪误差时要小。 激光发散角一定时, 望远镜跟踪误差越小, 越有利于激光回波探测。 望远镜跟踪误差、 激光发散角与接收到回波信号强度可用式(6) 来表示:
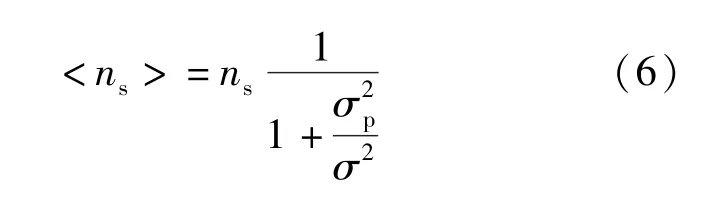
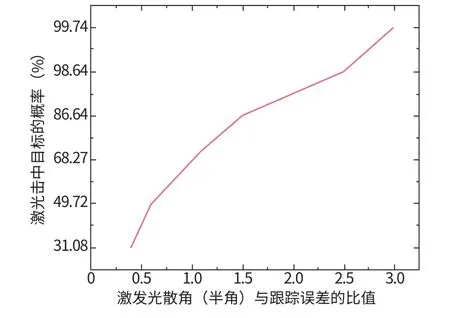
图4 激光击中目标的概率变化图Fig.4 Probability of laser hitting a target
式中,
由图4 及式(6) 分析可知, 望远镜伺服系统跟踪误差对空间碎片激光回波探测有直接的影响: (1) 激光发散角与跟踪误差的比值越大, 激光击中目标的概率越大; (2) 发散角一定时, 激光回波数随跟踪误差的减小而增加。 激光发散角的设计需与望远镜跟踪误差相匹配, 使两者达到最优化关系。
5.3 近红外波长激光测距技术
针对532nm 波长空间碎片激光测距系统在对小尺寸空间碎片探测能力、 目标探测范围受限等问题, 采用近红外波段(1064nm 波长) 激光测距技术开展小尺寸碎片观测逐渐成为一个发展趋势。 相比532nm 波长激光, 1064nm 波长信号具有输出功率高、 大气透过率优、 光子数多等特点, 因此应用于空间碎片探测十分有助于提升系统能力。 具体分析如下:
(1) 1064nm 波长激光输出功率更高
532nm 波长可见光是通过对基频1064nm 进行倍频, 但激光倍频器件的转换效率一般在50%左右, 导致了近一半的能量损失。 目前适合激光测距的532nm 激光器输出功率在数十瓦量级, 如果提高激光器的输出功率, 倍频器会损伤严重,器件稳定性会变差。
如果采用基频1064nm 波长激光测距, 在激光器其他指标不变的情况下, 激光器输出功率将可提高近一倍。 由于1064nm 波长激光器不需要使用倍频器件, 避开了倍频器件的效率问题, 可有效提升激光器功率, 同时也可以提高激光束的光学质量, 增大了激光器的稳定性。
(2) 1064nm 波长大气透过率更优
不同波长激光在大气中的透过率变化曲线有很大区别。 对于532nm 和1064nm 波长激光, 大气透过率分别在0.4 ~0.8 (变化大, 且在低仰角时较差) 和0.8 ~0.95 (低仰角透过率高且稳定)之间。 对比分析可以看出, 1064nm 具有更高的透过率, 回波更强, 观测弧段更长。
(3) 光子数
根据光的量子理论, 单个光子能量如式(7)所示:

式中, v 为光频率; c 为光速; h 为普朗克常数;λ 为光波长。
激光单位能量的光子数S 表示每1J 能量中包含的光子总数, S 可通过式(8) 计算:

由于单个光子能量和波长成反比, 相同能量的激光信号, 1064nm 波长的光子数量是532nm波长光子数的2 倍。 这有助于提高微弱信号目标测距的回波光子数, 提高系统测距能力。
6 空间碎片激光测距误差来源分析
空间碎片激光测距不同于卫星激光测距, 其为非合作目标, 主要为漫反射, 返回信号较弱。误差较大, 误差源较多。 空间碎片激光测距中,存在偶然误差因素和系统误差因素, 其中系统误差较为固定, 可以通过模型加以修正, 影响测距精度的主要是偶然误差。 系统误差主要包括系统时延、 大气延迟, 系统时延通过测量地靶进行改正, 大气延迟使用修正模型进行改正, 但仍会存在改正残差。 偶然误差包括激光脉冲宽度、 事件计时器计时误差、 主波信号探测误差、 回波信号探测误差和目标形状效应等。
各项误差对空间碎片激光测距望远镜时间测量精度σm的影响如式(9) 所示:

式中, σ1为激光脉冲宽度引起的误差; σ2为空间碎片形状效应引起的误差, 对于空间碎片, 由于其姿态不固定, 存在旋转现象, 使得目标反射面状态更为复杂, 作为测距的随机误差; σ3为系统延迟改正误差, 地靶距离测量精度一般可达±1mm, 系统延迟标校误差σ3< 3ps; σ4为大气延迟改正模型误差, 大气延迟改正模型采用Marini-Murray 模型, 模型修正误差σ4< 33ps; σ5为主波信号探测误差σ5<30ps; σ6为事件计时器计时误差σ6为几十皮秒量级; σ7为光子接收探测器时间抖动误差σ7约为百皮秒量级。
6.1 系统误差
系统误差主要为系统时延, 系统时延包括测量系统光路和电子设备引起的时延。 系统测量得到的距离是激光从主波取样探头产生的起始脉冲到回波探测器获得的关门信号之间的时间间隔。这两个探测点与仪器的相位中心不重合, 带来了所谓光路时延, 只要探测头位置不变, 光路时延可视为常数。 发射系统中, 电子设备和电缆对信号产生时延。 同样接收系统中回波信号经光子探测器到计数器关门, 也有时延。 这部分时延是由系统设备引起的, 称系统时延。
可通过测量地面靶目标对系统时延进行标定, 地面靶目标距离望远镜位置固定, 对入射的微能量激光进行反射, 测量激光从地面靶目标的往返飞行时间, 扣除固定距离值, 即获取系统时延量。
6.2 偶然误差
激光测距系统的偶然误差包括激光脉冲宽度影响、 事件计时器计时误差、 主波信号探测误差、 回波信号探测误差和目标形状效应。 由于测距系统采用高灵敏光子探测器, 有很快的响应速度, 计时设备一般采用皮秒级精度的事件计时器, 因而影响空间碎片激光测距精度的主要是激光器, 其中最大的因素是激光脉宽。 对空间碎片测距误差的主要来源, 如激光器脉宽和碎片形状效应等的具体分析如下。
(1) 激光脉宽对测距精度影响

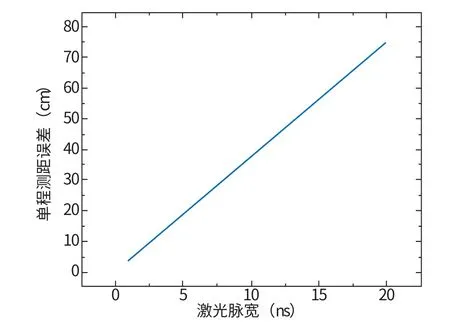
图5 单程测距误差随脉宽的变化Fig.5 Variation of one-way ranging error with pulse width
(2) 空间碎片尺寸对测距精度影响
对于空间碎片, 由于对入射激光进行表面反射, 即从碎片表面不同位置反射的激光信号, 到达地面测距系统后将产生时间差, 该时刻差直接影响着对目标距离测量误差, 作为测距的随机误差。 此外对空间碎片, 由于其姿态不固定, 存在旋转现象, 使得目标反射面状态更为复杂。
7 总结
空间碎片已经成为全球性问题, 成为影响航天事业发展和外空活动长期可持续的关键因素,是国际社会高度关注的热点, 也是国际外空利益博弈的焦点。 为了航天活动可持续发展和外空资源的进一步开发利用, 通过研究空间碎片观测方法, 提高碎片监测数量和精度, 提升空间碎片应对技术能力。
随着国外空间碎片激光探测技术发展, 近红外波长(1064nm) 激光测距技术成为发展趋势。相比532nm 波长激光信号, 1064nm 波长激光信号在激光输出功率、 大气传输、 目标观测隐蔽性等方面具有良好技术优势, 是开展小尺寸空间碎片激光观测的重要技术。 未来可根据空间碎片监测任务需求和观测计划, 联合国内其他台站, 执行空间碎片激光跟踪与测量工作, 为我国空间碎片监测预警、 航天器机动规避及大气质量密度模型校正研究等领域提供更多的高精度测量数据支持。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
杭州电子科技大学学报(自然科学版)(2022年3期)2022-06-08
航天返回与遥感(2021年6期)2022-01-11
阅读(科学探秘)(2021年8期)2021-09-01
电脑知识与技术(2016年7期)2016-05-19
中国高新技术企业(2015年25期)2015-07-24
中国高新技术企业(2015年12期)2015-03-31
现代电子技术(2014年16期)2014-08-20