公路隧道Ⅳ级围岩段机械化全断面施工步距控制研究
2021-01-07 01:05郭鸿雁张晓龙苏军伟
公路交通技术 2020年6期
郭鸿雁,张晓龙,苏军伟,3,李 科
(1.招商局重庆交通科研设计院有限公司,重庆 400067; 2.云南建设基础设施投资股份有限公司,昆明 650501;3.重庆交通大学,重庆 400074)
近年来,我国在钻爆法隧道机械化全断面施工技术及相关研究方面取得了一定的成果。关宝树[1-2]提出在矿山隧道尽可能选择全断面施工方法,目前围岩补强技术的发展和大型机械的应用使得全段面施工成为可能;胡亚峰、洪开荣等[3-4]提出通过补强措施来增强掌子面的强度,以避免因全断面开挖造成围岩失稳的问题;王明年等[5]基于经典楔形体模型,以郑万高速铁路荣家湾隧道为背景,为软弱围岩隧道超前支护体系设计、优化提供理论支撑;黄维科等[6]以贵黄高速龙昌隧道施工为例,提出9种专用隧道施工机械设备搭配,采用相应机械化施工技术,提高了隧道施工的机械化程度、工作效率、安全性;李俊均[7]以林山隧道工程为依托,基于实际应用,就凿岩台车的适用性、供配电要求、影响作业效率、开挖炸药单耗情况、超欠挖控制等关键技术经济指标进行分析研究;鲜国[8]在已有成果基础上,以跃龙门隧道依托,对隧道在施工过程中动态施工组织管理进行研究,并在实施过程中不断完善和优化,使得工程进展可控有效;许冬莲等[9]结合博深高速公路石鼓隧道施工实践,介绍配套设施建设、人员与机械设备配置、施工工艺及前期右线人工施工和左线机械化施工比较,从而得出隧道机械化施工具有明显的社会效益和环保效益的结论;林毅、万姜林、殷立军等[10-12]对围岩隧道机械化施工的开挖方法、支护方式、施工安全控制、机械配套与施工工艺开展了系列研究,形成了成套的施工技术;赵勇[13]提出控制开挖进尺、各施工步距、提高初期支护强度等措施来控制隧道围岩变形;王志龙等[14]采用有限元数值分析与实测数据回归分析等方法,建立了确定二次衬砌支护时距掌子面距离的理论计算方法;王海周[15]以隧道安全步距为焦点,探求不同围岩及支护条件下的安全步距理论值。
总结分析目前隧道机械化施工现状及相关研究成果,有以下几点认识:1) 隧道机械化施工多应用于Ⅰ~Ⅲ级围岩,Ⅳ、Ⅴ围岩的应用案例较少,多处于应用研究与试验段测试阶段;2) 隧道机械化施工方面的研究多集中于施工开挖方法、支护理论、辅助加固措施、施工机械配套与施工组织管理等方面;3) 目前关于传统钻爆法分步开挖的安全步距研究有所涉及,但缺乏Ⅳ、Ⅴ级围岩条件下隧道机械化全断面施工安全控制步距的相关研究。为此,本文在已有研究现状分析的基础上,结合依托工程的实际情况,通过三维数值仿真分析与现场试验段测试等方法,针对公路隧道Ⅳ级围岩段机械化全断面施工步距控制开展了相关研究工作,提出适用于公路隧道Ⅳ级围岩段钻爆法机械化全断面施工开挖方法与施工安全控制步距。
1 工程概况
云南某新建特长隧道单洞长约8 200 m,最大埋深737 m,主线隧道洞身段穿越地层主要以砂岩、砾岩、页岩、灰岩、白云岩、板岩为主,局部可能夹煤线。围岩完整程度呈一般破碎-较完整,基岩裂隙水较发育,预估呈点滴状出水,局部淋雨状,隧道全线Ⅳ级围岩约占60%,隧道进洞初期采用传统的人工钻爆法施工,施工方法主要为台阶法,后为提高施工效率,缩短施工工期,拟采用机械化全断面施工,为确保掌子面稳定,掌子面开挖前采用Φ60中管棚(长度20 m@40 cm)进行预加固。
2 基于围岩稳定性分析的施工控制步距研究
2.1 计算模型建立与参数选取
结合该隧道的实际施工情况,借助FLAC3D数值模拟软件,建立三维数值仿真分析模型。为消除边界效应影响,模型边界按照3~5倍洞径进行取值,考虑到二衬步距的研究,模型的纵向尺寸宜大于200 m,本次模型尺寸取120 m×120 m×240 m(高×宽×长);位移边界条件为:顶部为自由边界,底部和左右边界为固定边界。为保持与实际工程施工情况一致,本次模拟开挖考虑了由台阶法变为全断面法的施工工序转换过程,计算分析模型如图1所示。

围岩及衬砌结构力学参数根据JTG 3370.1—2018《公路隧道设计规范 第一册 土建工程》的相关规定进行取值,其中围岩力学参数取规范建议取值范围的中值,见表1。

表1 围岩与衬砌结构力学参数取值
2.2 计算结果分析
1) 二衬与掌子面距离
本次仿真模拟了隧道从上下两台阶法施工转换为全断面施工的全过程,掌子面总掘进长度240 m,共设置8个监测断面,其中前3个断面(K0+8、K0+46与K0+62)位于两台阶法施工段,中间1个断面(K0+94)位于工序转换段,后4个断面(K0+106、K0+118、K0+130、K0+142)位于全断面施工段。提取隧道围岩与支护结构变形随施工开挖步变化规律以及沉降变形的空间分布规律,分析合理的施工安全控制步距与二衬结构施作时机。隧道拱顶沉降随施工开挖步变化规律如图2所示,隧道拱顶沉降纵向分布规律如图3所示。
在实际研究调查期间,主要对问卷检测方法进行使用,其中对县级、市级以及农村地区各层次学生对于初中数学函数知识掌握情况进行了解与掌握,其主要目的在于真正发现基础函数知识对于动点问题产生的各种影响。
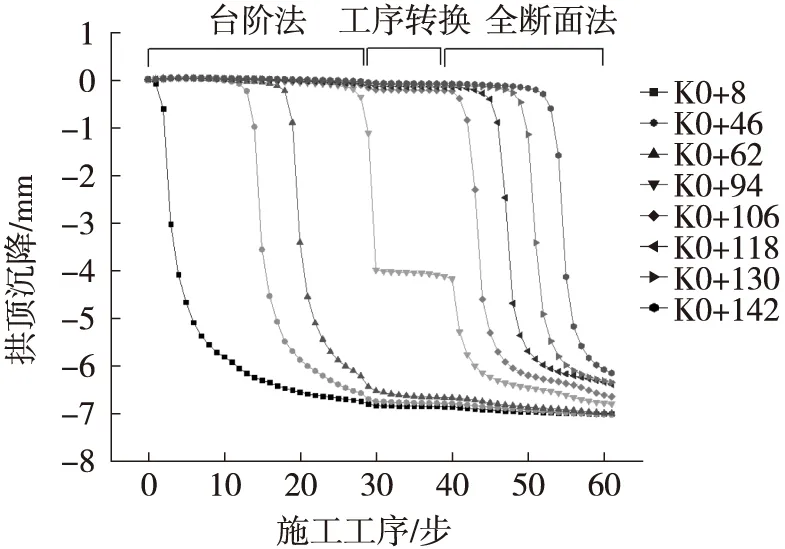
图2 隧道拱顶沉降随施工开挖步变化规律
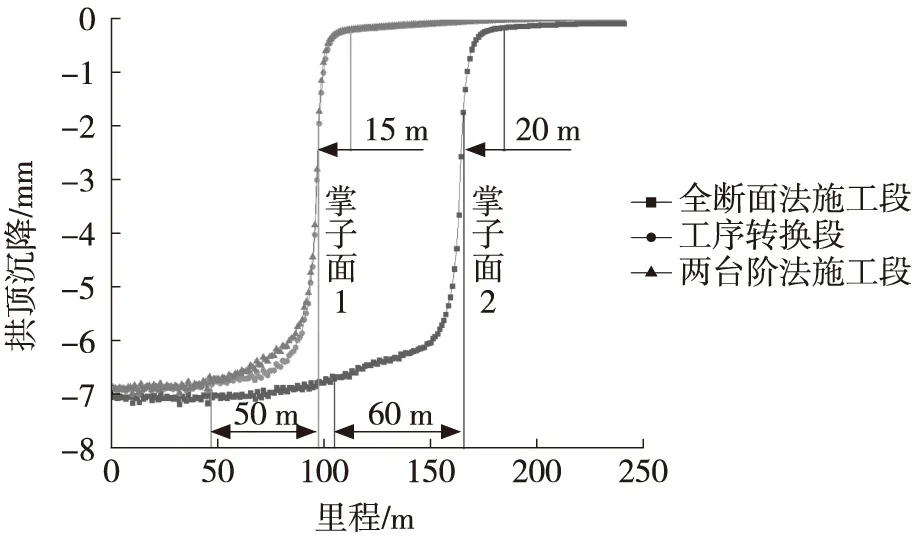
图3 隧道拱顶沉降纵向分布规律
由图2可知,隧道施工过程中,围岩与初期支护变形分为3个阶段:1) 掌子面开挖前的缓慢预变形段(约占5%);2) 掌子面施工过程中变形增长段(约占80%);3) 仰拱施工后的变形收敛稳定段(约占15%)。由图3可知,隧道采用全断面施工时,因掌子面一次性开挖,临空面较大,使得隧道围岩稳定性较台阶法施工差,且对掌子面前后方围岩稳定性的影响范围更大;当采用上下两台阶法施工时,掌子面前后方围岩变形影响范围分别约为15 m和50 m;而采用全断面施工时,掌子面前后方围岩变形影响范围分别约为20 m和60 m。
综上分析,对于Ⅳ级围段,采用全断面施工时,隧道初支完成后,距掌子面后方60 m的围岩与支护趋于稳定,即当二次衬砌步距大于60 m后,对围岩稳定性的影响较小,因此二次衬砌步距可根据施工组织需要确定。
2) 仰拱与掌子面距离
本次模拟分析了隧道仰拱开挖及仰拱步距对围岩稳定性的影响。隧道拱顶沉降随施工步序、仰拱步距变化规律分别如图4、图5所示。
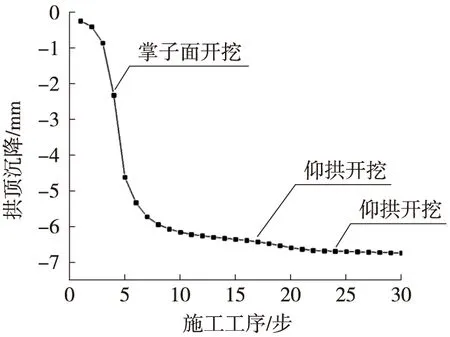
图4 隧道拱顶沉降随施工工序变化规律
由图4可知,隧道仰拱开挖引起的围岩变形较小,约占累计沉降量的2.2%,且仰拱施工完成后,迅速趋于稳定。由图5可知,围岩变形随仰拱步距的增大,变化很小,当仰拱步距由50 m变为80 m,拱顶沉降增量仅为0.1 mm,约占累计沉降量的1.4%。
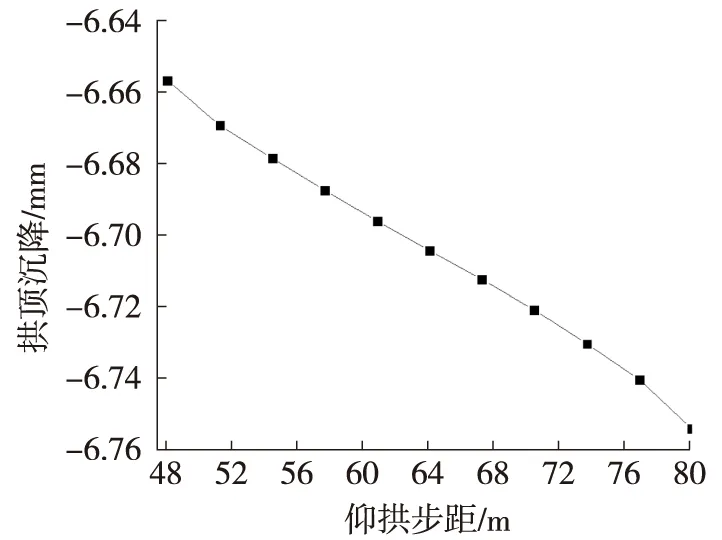
图5 隧道拱顶沉降随仰拱步距变化规律
基于围岩稳定性分析的施工步距研究结果表明:对于该隧道,当Ⅳ级围岩段采用全段面机械化施工时,掌子面施工对掌子面后方影响的距离约为60 m,超出影响范围外的路段,围岩基本趋于稳定,即二衬跟进步距不是影响围岩稳定的主控因素,同时仰拱开挖引起的围岩与支护结构变形较小,且变形随着仰拱步距的增加变化很小,因此二衬与仰拱的施工控制步距可根据施工组织方案确定。
3 基于机械化施工组织的施工控制步距研究
隧道施工过程中,仰拱与二衬的施工步距除需满足围岩稳定与施工安全要求外,还需为设备提供足够的作业空间,当存在多设备配合作业时,同时还需提供一定设备行走交织作业空间,确保各设备间协同作业的紧凑有序,这样才能最大限度地发挥机械施工效率。通过对比分析隧道施工过程中各道工序的机械配套情况,以获得满足机械化施工组织的施工控制步距。
3.1 仰拱与掌子面距离
仰拱与掌子面间的控制距离需满足钻爆、出渣、锚喷、钢架安装以及复喷等施工作业要求。其中各道工序纵向最小作业距离为:
1) 钻爆作业。三臂凿岩台车(18 m)+作业台车(10 m)=28 m。
2) 出渣作业。渣土(10 m)+出渣作业(20 m)+作业台车(10 m)=40 m。
3) 喷锚作业。混凝土湿喷台车(10 m)+堆料区域(10 m)+作业台车(10 m)=30 m。
4) 拱架安装。作业台车(10 m)+装载机送拱架(10 m)=20 m。
5) 复喷作业。混凝土湿喷台车(10 m)+堆料区域(10 m)+作业台车(10 m)=30 m。
为确保隧道施工效率的最大化,建议工序交织区预留距离20 m~30 m,因此建议仰拱距掌子面距离不小于60 m~70 m,建议按70 m进行控制。
3.2 二衬与掌子面距离
根据施工组织需要,二衬与掌子面距离需要考虑以下几个因素:1) 仰拱距掌子面70 m;2) 仰拱开挖与支护段落相距(仰拱栈桥式)60 m;3) 钢筋或防水板铺挂台车工作长度10 m;4) 二衬台车工作长度10 m;5) 工序交织预留距离15 m。因此,建议二衬与掌子面距离按200 m进行控制。
基于机械化施工组织的施工控制步距研究结果表明:为满足施工组织需要,提高机械化作业施工效率,建议该隧道Ⅳ级围岩段仰拱与掌子面间距按照70 m进行控制,二衬距掌子面距离按照200 m进行控制。
4 试验段现场实测分析与验证
在理论分析研究的基础上,该隧道设置了200 m试验段(ZK71+930~ZK72+130)进行试验验证。根据施工进度,试验段布置了17个监测断面,实时监测预警,动态调整支护方案,同时根据监测结果对隧道机械化全断面施工过程中围岩与支护结构的变形规律进行对比分析与验证。典型断面拱顶沉降随时间的变化规律如图6所示,掌子面后方拱顶沉降纵向分布规律如图7所示。
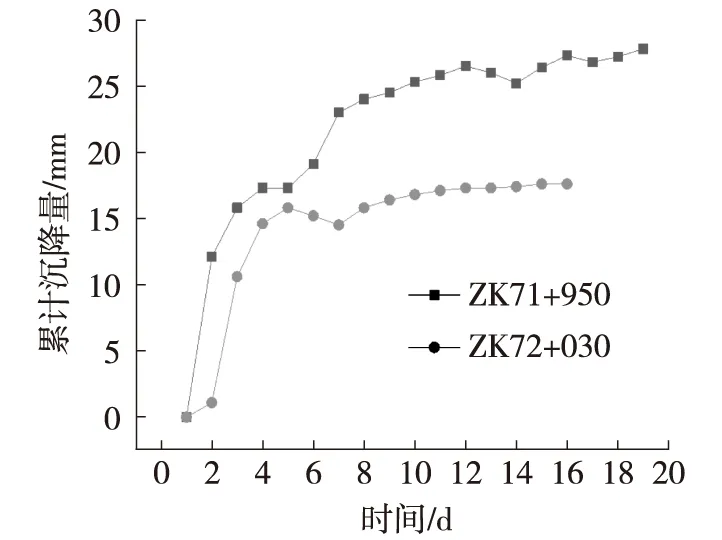
图6 典型断面拱顶沉降随时间的变化规律
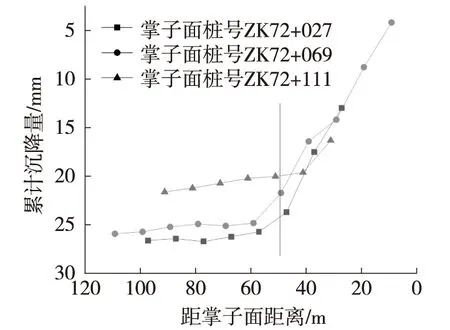
图7 掌子面后方拱顶沉降纵向分布规律
由图6可知,当采用机械化全断面施工时,隧道掌子面开挖完成后,围岩沉降变形随着时间的增长而逐渐增大,变形速率(曲线斜率)随着时间增大而逐渐减小。监测7 d~10 d后,累计变形逐渐趋于收敛,围岩趋于稳定。试验段施工进度约为6 m/d,即距离掌子面42 m~60 m后,围岩逐步趋于稳定。由图7可知,掌子面掘进对掌子面后方50 m范围内的围岩变形影响较大,距掌子面50 m后围岩逐步趋于稳定,以上分析结果与数值模拟结果基本一致。
现场200 m试验段施工结果表明:对于该隧道Ⅳ级围岩段,在推荐的施工开挖方法、支护参数以及施工步距控制条件下,采用机械化全断面施工是可行的。
5 结论
1) 当该隧道Ⅳ级围岩段采用全段面机械化施工时,掌子面施工对掌子面后方影响距离约为60 m,即二衬跟进步距不是影响围岩稳定的主控因素,同时仰拱开挖对围岩与支护结构变形影响较小,因此二次衬砌与仰拱的施工控制步距可根据施工组织方案确定。
2) 综合考虑隧道围岩稳定与现场施工组织优化,对于该隧道Ⅳ级围岩段采用机械化全断面施工时,建议仰拱与掌子面的施工步距按70 m控制,二衬与掌子面距离按200 m控制。
3) 现场200 m试验段施工结果表明,对于该隧道Ⅳ级围岩段,在推荐的施工开挖方法、支护参数以及施工步距控制条件下,采用机械化全断面施工是可行的。
4) 通过数值分析与现场试验段实测的方法,提出了该隧道Ⅳ级围岩条件下隧道机械化全断面施工步距控制的建议标准,但因隧道地质情况差异大,不能包括所有实际隧道工程情况,对类似工程仅供参考。
猜你喜欢
小读者(2022年23期)2023-01-16
现代国企研究(2022年5期)2022-11-13
工程地质学报(2022年4期)2022-10-06
铁道建筑技术(2021年4期)2021-07-21
科技研究·理论版(2021年20期)2021-04-20
山西化工(2021年1期)2021-03-15
铁道科学与工程学报(2020年10期)2020-11-19
作文周刊·小学一年级版(2020年16期)2020-06-12
铁道建筑(2019年7期)2019-08-08
商品与质量(2019年7期)2019-07-24