超声空化及其声流结构实验研究∗
2021-01-02 09:23俞启东徐志程马潇健
应用声学 2021年6期
俞启东 徐志程 赵 静 马潇健
(中国运载火箭技术研究院研究发展部 北京 100076)
0 引言
超声波在液体中的瞬态压力变化会产生大量的空化气泡[1]。气泡在溃灭时会形成高速射流和冲击波,并伴随着大量能量的释放[2]。由空泡溃灭引起的这种高温、高压的极端条件可应用于污水处理[3]、材料萃取[4]、化学反应[5]和靶向治疗[6]等领域。然而,超声空化的广泛推广仍然受到宽带噪声[7]、空蚀损伤[8]和结构振动[9]等问题的限制。为了解决上述问题,明确超声空化流场的结构,优化超声设备的产品设计,需要进一步对超声空化形态和声流场结构进行详细和全面的研究。
为了研究超声场作用下的空化形态,大量研究者采用全流场显示技术研究了超声空化的瞬态演化过程。Moussatov等[10]采用电子图像拍摄系统研究了超声频率为20.7 kHz时的空化形态。结果表明,在变幅杆附近产生了由大量微气泡构成的锥形空化结构(Conical bubble structure,CBS)。该特殊形态的空化结构受变幅杆和超声声强的显著影响,并且形成机理可由一阶Bjerknes原理进行定性解释。Mandroyan等[11]利用激光断层扫描技术研究了在20 kHz和40 kHz变幅杆附近锥形空泡结构的瞬态变化。研究结果表明,变幅杆的存在显著影响了锥形空化区的瞬态演化过程。Viennet等[12]采用片状激光可视化系统研究了超声反应器中的空化结构,发现锥形空化结构均匀分布在超声变幅杆径向同心圆上。Luo等[13]对不同输入功率下20 kHz处的CBS空化和空化进行了实验研究,研究表明,当超声设备输入功率为300 W时测试材料边缘的空化现象比中心处更为严重。
尽管采用全流场显示技术可以对超声场作用下的锥形空泡结构进行图像观察,但该方法对其流场结构瞬态演化过程仍缺乏定量的数据分析与研究。Frenkel等[14]采用粒子图像测速仪(Particle image velocimetry,PIV)研究了超声场作用下的流场结构瞬态演化过程。研究结构表明,超声波强度与声流(Acoustic streaming)速度峰值呈正线性相关关系。Layman等[15]采用PIV和红外热像仪同步测量技术研究了20 kHz时空化区域温度与声场的关系。研究结果表明,相对较小的流动黏度变化可以改变热量的产生。Chouvellon等[16]采用PIV观察了不同声功率、实验水深和流体黏度等因素对声流速度的影响。
超声空化结构是近年来备受关注的一种空化结构,但对其复杂的空化形态和流场结构还没有很好的认识,还需要进一步的研究。本文采用高速摄像系统和PIV系统分别对超声场作用下的锥形空泡结构及其流场结构进行详细研究。本研究的目的是:(1)研究锥形空泡形态的瞬态演化规律和声流流场的速度测量;(2)研究声流结构在不同输入功率作用下的时均速度场。
1 实验设备
图1为研究超声场下锥形空泡结构的实验装置的示意图。实验装置由超声空化装置、高速成像系统和速度测量系统组成。本实验采用的超声处理器(88-1型,中国科学院声学研究所)的工作频率为18 kHz;换能器为直径(D)为20 mm的圆柱形辐射面,并做简谐运动的活塞振动;该设备的控制单元可以实现不同输入电流的精确控制与数值读取,而输入电压恒定保持为220 V,因此,通过调节输入电流即可实现不同输入功率(Pin=50~250 W)的精确控制。换能器浸入水箱(300 mm×170 mm×160 mm)中,且辐射面与水箱底部的距离为7D。水箱水温控制在25°C左右。与蒸馏水中的超声空化结构相比,在相同的超声功率作用下,自来水中能得到相同的空化气泡结构,但所含的空化气泡更多[17]。因此,本文为了在高速摄像系统的拍摄过程中获得更清晰的空化结构,实验中采用自来水来降低空化阈值。

图1 实验系统示意图Fig.1 Schematic diagram of experimental system
为了实现锥形空泡的图像采集,使用采集速率高达100000帧/s的电荷耦合器件(Charge coupled device,CCD)相机对空化气泡进行捕捉。本文中使用的CCD摄像机的分辨率为1024×1024像素。光源位置和高速摄影机(拍摄角度)位置可以调整,以获得更好的拍摄效果。此外,本文采用PIV测量声流场的速度。光源是一个双头Nd:YAG激光器,光束扩展可到1 mm宽。对于实际的数据采集,利用商业PIV软件Dynamics Studio对速度矢量场进行处理,查询区域一般为32×32像素,重叠率为50%。为了消除错误向量,在PIV后处理中通过指定相对公差使用滤波器进行处理。
2 结果与讨论
图2给出了当输入功率为100 W时的锥形空泡结构瞬态演化过程。图像是当联通超声空化装置、待变幅杆稳定之后,通过高速摄像机拍摄所得。图像之间的时间间隔为50 ms。如图2所示,在变幅杆下端面处观察到由大量空化气泡均匀分布组成的倒锥状结构,该种空化结构被称为“锥形空泡结构”。气泡是由于超声波的剧烈波动从而导致的空化作用而产生的,并且这些空化气泡初始产生位置为变幅杆的辐射面。可以观察到,大量的空化气泡之间通过自组织效应远离变幅杆的声辐射面,并朝向远离声辐射面对称轴上的某一固定点运动,从而形成倒置的锥形空泡结构。在该固定点附近,当超声强度低于空化阈值,空化气泡几乎全部溃灭消失。值得注意的是,随着时间的瞬态演化,锥形空泡结构的形态并未发生明显的变化。结果表明,当输入功率一定时,锥形空泡结构的形态不会随时间发生显著变化。这种现象在流体领域被称为稳态流动。

图2 超声空化形态瞬态演化Fig.2 Transient evolution of ultrasonic cavitation morphology
图3给出了当输入功率为100 W时锥形空泡结构附近的流场结构速度云图和流线图。由于锥形空泡结构的瞬态演化过程为稳态,本文中采用时均PIV测量系统对锥形空泡结构附近的流场结构进行了定量测量。CCD相机捕获了100组瞬时粒子图像对(image pair),并对它们进行了平均化处理,得到了声流场的时均速度值。图像对之间的间隔为400µs。如图3所示,在超声变幅杆附近产生了两种不同的声流形式:第一种是变幅杆底端的射流型声流(Acoustic jet-like streaming);第二种是变幅杆两侧的回旋流(Recirculation flow)。射流型声流是由于超声变幅杆的超声辐射力作用,促使变幅杆底部流体朝底部运动。变幅杆两侧的流体虽未受到超声辐射力的直接作用,但是由于流体的黏性效应较大,两侧流体在射流型声流的黏性力剪切作用下形成方向相反的回旋运动。由于射流型声流的速度显著大于回旋流,本文中PIV的研究主要集中在变幅杆下端面附近的射流型声流的高速区域。
为了进一步定量研究射流型声流的速度场结构,图4给出了PIV所得的射流型声流高速区域的速度云图(图3中红色虚线矩形区域)。x轴为无量纲参量x/D,y轴为无量纲参量y/D,z轴为流场速度,底面为速度梯度的等高线图。空间位置(x/D=0,y/D=0)处为超声变幅杆的中心位置。如图4所示,超声变幅杆下端面附近射流型声流的速度出现尖峰值U=0.45 m/s。当射流型声流远离变幅杆端面时,速度值迅速降低至U=0.15 m/s左右。在远离超声变幅杆的径向位置处,速度值几乎稳定在U=0.1 m/s。结果表明,超声变幅杆振动诱发的射流型声流的速度远大于回旋流,并且流场结构与空间分布紧密相关。

图3 超声空化流场结构速度云图Fig.3 Velocity contour of ultrasonic cavitation lf ow field
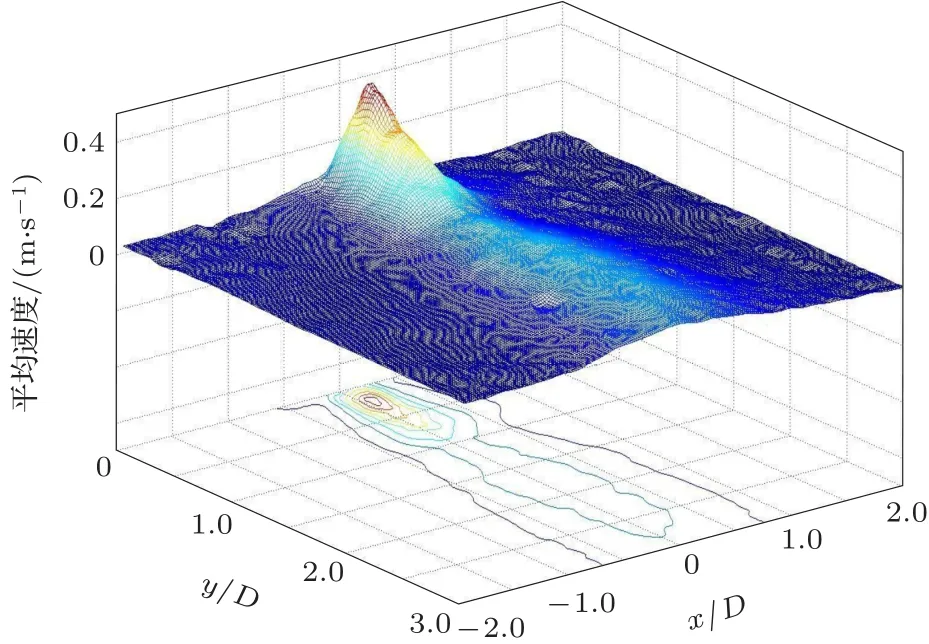
图4 3D超声空化流场结构速度云图Fig.4 3D velocity contour of ultrasonic cavitation lf ow field
为了研究空泡结构与声流结构之间的对应关系,图5给出了锥形空泡运动与声流运动的对比图。其中,图5(a)是基于高速摄像系统所得的锥形空泡结构。为了研究空泡结构的运动情况,采用光流法(Optical flow method)对空泡结构中的典型气泡进行追踪。图5(a)中箭头表征为气泡在一定时间间隔内的运动轨迹,通过计算气泡的运动轨迹和时间间隔可推算出气泡的运动速度值。光流法的具体介绍详见文献[1]。如图5(a)可知,锥形空泡结构内部的气泡存在垂直向下的运动趋势,而在锥形空泡结构之外的区域不存在流体运动的情况。此外,为了获得声流结构的运动况,图5(b)给出了基于PIV系统的声流速度场云图,其中红色虚线所构成的三角形为空泡形态,是通过提取图2中高速摄像结果的平均值所得。由图5(b)可知,声流结构的主要运动情况分布在锥形空泡区域,而在锥形空泡结构之外的区域速度非常低。通过对比图5可得,声流是由气泡流动带动而产生的。为了进一步定量研究空泡运动与声流运动之间的对应关系,图6给出了不同输入功率作用下空泡速度与声流速度对比图。如图6所示,声流速度和空泡速度呈正相关,进一步表明声流是由气泡流动带动而产生的。

图5 空泡运动与声流运动对比图Fig.5 Comparison of cavitation and acoustic flow

图6 不同输入功率作用下空泡速度与声流速度对比图Fig.6 Comparison of cavitation velocity and acoustic velocity under different input power
为了进一步研究声流结构在空间分布情况,图7给出了输入功率对不同径向位置处声流速度的影响。观测位置为在超声变幅杆的中心轴线上的0.5D、D、2.0D和2.5D处的平均速度分布。如图7所示,对于相同的y/D值来说,输入功率的改变显著影响了射流型声流的速度分布:当输入功率增加时,射流型声流的速度峰值也随之增加。但是输入功率的改变对于回旋流的影响十分微弱。对于相同的输入功率来说,y/D的改变显著影响了射流型空泡的速度峰值:随着y/D值的增加,射流型声流的速度峰值显著减小。同样,y/D的改变对于回旋流的影响十分微弱。上述实验现象表明,y/D和输入功率能显著影响射流型声流的流场结构,但是对回旋流的影响十分微弱。

图7 2D超声空化流场结构速度云图Fig.7 2D velocity contour of ultrasonic cavitation flow field
3 结论
本文采用高速摄像和粒子图像测速系统分别研究了超声场下的空化形态和声流场结构。实验研究了50 W、100 W、200 W和250 W等4种不同输入功率对18 kHz的超声变幅杆附近空化及其声流场的影响。主要结论如下:
(1)在变幅杆下端面处观察到由大量空化气泡均匀分布组成的倒置的锥形空泡结构。大量气泡通过超声波的剧烈波动而产生的,并通过自组织效应远离变幅杆的声辐射面,朝向远离声辐射面的某固定点运动,从而形成倒置的锥形空泡结构。除此之外,当输入功率一定时,锥形空泡结构为不随时间发生变化的稳态流动。
(2)在超声变幅杆附近产生了两种显著不同的声流结构,第一种是变幅杆底端的射流型声流,第二种是变幅杆两侧的回旋流。射流型声流是由于超声变幅杆的超声辐射力作用,促使变幅杆底部流体朝底部运动。变幅杆两侧的流体虽未受到超声辐射力的直接作用,但是由于流体的黏性效应非常大,两侧流体在射流型声流的黏性力剪切作用下形成方向相反的回旋运动。此外,通过研究空泡与声流最大速度点之间的空间对应关系,发现声流是由空泡流动带动而产生的。
(3)空间距离和输入功率能显著影响射流型声流的流场结构:对于相同的距离来说,当输入功率增加时,射流型声流的速度峰值也随之增加;对于相同的输入功率来说,随着距离的增加,射流型声流的速度峰值显著减小。
猜你喜欢
农业装备与车辆工程(2021年10期)2021-11-03
上海交通大学学报(2021年8期)2021-09-02
数字海洋与水下攻防(2021年2期)2021-05-08
昆明医科大学学报(2021年1期)2021-02-07
北京航空航天大学学报(2019年8期)2019-09-10
河南工学院学报(2017年1期)2017-06-07
系统工程与电子技术(2016年2期)2016-04-16
中华老年口腔医学杂志(2016年5期)2016-03-01
中国继续医学教育(2015年5期)2016-01-07
船海工程(2015年4期)2016-01-05