基于PSO-SVM的回转窑筒体故障诊断
2020-12-28 04:16:46吴张瑾
数字制造科学 2020年4期
吴张瑾,张 云
(武汉理工大学 机电工程学院,湖北 武汉 430070)
回转窑是水泥生产的关键设备,其中,作为物料完成物理和化学变化容器的回转窑筒体发挥着重大作用,有必要对回转窑筒体的各类故障进行快速的识别。由于筒体表面温度极高,对回转窑筒体直接进行故障信息的获取十分不便。对此,Rusiński等[1]发现托轮挠度会随着筒体运行状态而改变,并提出了基于托轮挠度的回转窑筒体运行状态监测的方法;郑凯、胡昭中等也发现从托轮挠度信号中可以获取筒体的故障信息[2-3]。基于以上研究,提出利用MEEMD(modified emsemble empirical mode decomposition)从托轮挠度信号中提取相关故障信息,并从中选取相关时域参数构成特征向量输入到粒子群优化算法的支持向量机中进行故障诊断[3-5]。
1 回转窑筒体故障分析
回转窑筒体常见的故障有窑筒体弯曲变形和窑筒体轴线偏移两种。当筒体存在热弯曲变形时,筒体会对托轮产生冲击载荷;当窑中心线偏移程度加深时,会导致其相对弯曲侧托轮载荷增大,引发托轮轴挠度变化。因此,筒体不同故障会表征于这种托轮轴挠度信号中。由于托轮沿回转窑筒体轴线方向对称放置,在无故障状态下其左右两个托轮受力情况应基本相同,现研究单侧托轮的受力,视筒体与轮带为一个整体,如图1所示。
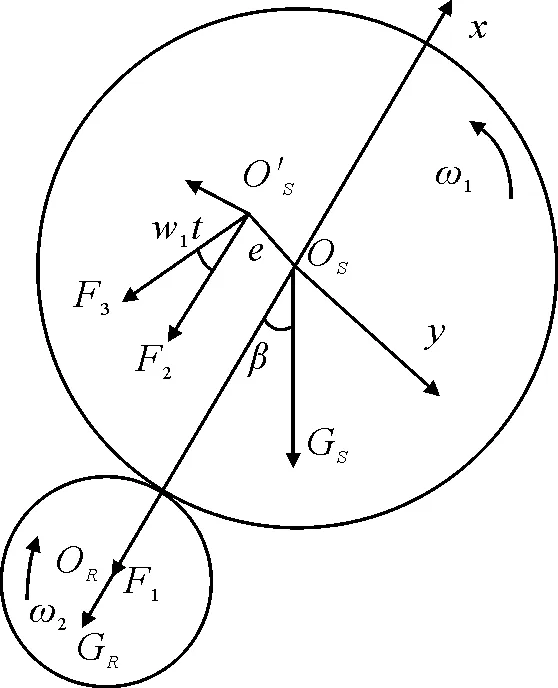
图1 托轮受力示意图
图1中:OS和O′S分别为筒体理想中心和实际的运转瞬时中心;OR为托轮中心;ω1和ω2分别为筒体运转角速度和托轮运转角速度。
现将筒体中心OS和托轮中心OR连线方向定义为x轴方向,则托轮在x方向的总受力为:
F=GR+F1+F2
(1)
式中:F为托轮受到筒体的正压力;GR为托轮重力沿x轴方向上的分力;F1为筒体给与托轮的静态载荷;F2为此处筒体截面上的偏心带来的动载荷,作用于托轮上。
托轮所受到的筒体静载荷是不变的,大小为:
F1=Msgcosβ
(2)
式中:Ms为筒体在该档处的等效质量;β为重力方向与x轴夹角,大小一般是30°。
偏心e是衡量截面轮廓形状的重要参数,为了用数学公式定量的描述托轮受到的动载荷,提出了一个简化的离心力公式,则其产生的离心力大小为:
(3)
将离心力分解,则其在x轴方向上的分力即为托轮受到的动态载荷,大小为:
(4)
将托轮轴简化为简支梁模型,两端固定,中间集中受力,可知托轮轴受动态载荷所产生的变形挠度值为:
(5)
式中:l为托轮轴的长度;EI为托轮的等效抗弯刚度。
设托轮轴因静态压力形成的永久弯曲变形量为δ,则其挠度值为:
s2=δcos(ω2t+φ)
(6)
其中,φ为托轮与轮带之间轻微的相对滑动的角度差;δ的大小与筒体静态载荷F1正相关。则托轮轴总的挠度值为:
s=s1+s2
(7)
s=kcos(ω1t)+δcos(ω2t+φ)
(8)
(9)
由式(8)可知,托轮轴挠度变化信号中包含了与筒体转频和托轮转频一致的成分,将其分别命名为筒体(KS)谐波和托轮(KR)谐波。筒体出现热变形时,其中KS谐波会发生变化;窑中心线偏移程度加深时,将影响到托轮挠度信号中KR谐波。因此,KS、KR谐波可以用来表征回转窑筒体的故障。
2 监测特征的提取
2.1 特征频率验证
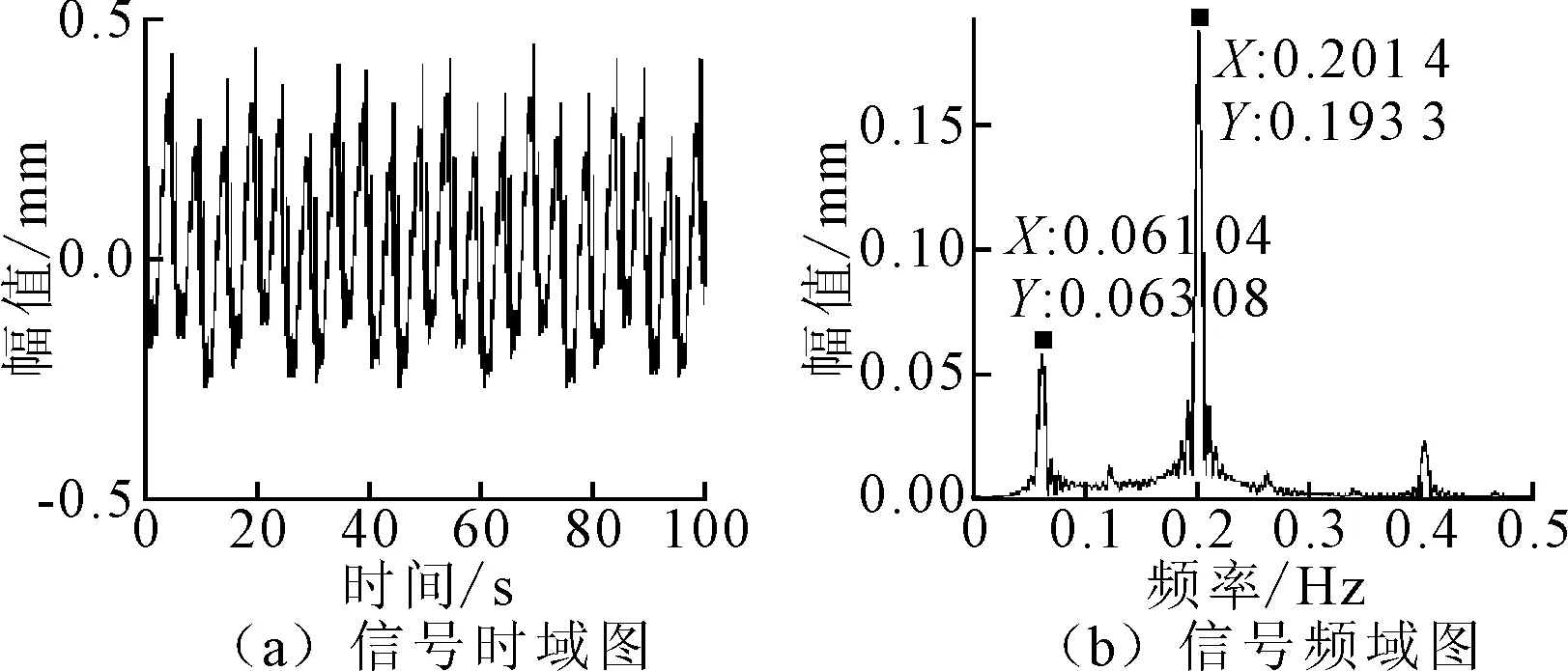
图2 信号时域图和频域图
文中采用的数据为国内某水泥厂回转窑筒体6个周期时间对应的托轮轴挠度信号,图2为三挡左托轮轴挠度变化信号的时域和频域波形图。频谱分析中的0.061 04 Hz频率与筒体转频基本吻合,频谱分析中的0.201 4 Hz频率与三档托轮转频基本吻合。由此表明,托轮轴挠度信号的特征频率包含了筒体和托轮转动频率对应的频率成分,即为筒体(KS)谐波和托轮(KR)谐波。
2.2 基于MEEMD的特征信息提取
受回转窑恶劣的工况影响,现场采集的托轮轴挠度信号中包含有强烈的噪声,其有效故障特征信息极易被淹没。对托轮轴挠度信号这种非平稳信号,为了在时域和频域内全面揭示其组成和变化特征,需要通过各种方法计算其每个信号单分量的瞬时频率,从中提取能反映研究对象故障特征信息的分量,分析它们的时域、频域特征。
基于改进的集合经验模式分解(MEEMD)在信号特征提取方面的优越性,利用改进的集合经验模式分解对托轮轴挠度信号进行分解[6]。其主要过程为:在EMD(empirical mode decomposition)分解过程中加入大小相等的正负白噪声信号,可以极大改善EEMD(ensemble empirical mode decompostion)分解中的噪声残留问题;再利用熵值原理对获取的IMF(intrinstic mode functions)分量进行排序[7],并舍弃熵值较大的IMF分量,这样可以改善EEMD分解有时会获得不同IMF分量的问题[8]。
对非平稳信号x(t),MEEMD分解步骤如下:
(1)在信号x(t)中,分别添加高斯白噪声信号ni(t)和-ni(t),即:
(10)
式中:ai为白噪声的幅值;i为所添加的高斯白噪声的数量。
(3)对第一阶IMF分量序列进行平均以消除噪声影响:
(11)
(4)检测I1(t)的熵值,若大于排列熵阈值θ0,则为异常信号,否则为平稳信号。间歇信号的熵值较大,经多次试验,θ0取0.55~0.6合适,文中取0.6。若为异常信号,重复步骤(1)到步骤(3)直到处理后的IMF分量Ip(t)为平稳信号。
(5)将已分解得到的前p-1个分量剔除,即:
(12)
其中,r(t)为剩余信号。
(6)对上述剩余信号r(t)继续进行EMD分解,将得到的所有IMF分量按频率由高到低排列,即为最终结果。
运用上述方法对某水泥厂的回转窑托轮轴挠度信号进行分析。回转窑参数如表1所示。
由于采集现场有大量噪声干扰,首先要对采集的信号进行降噪处理,选取的方法为小波阈值去噪。以一挡右托轮为例,其去噪原始信号时域、频域图如图3所示,分别采用EMD、EEMD、MEEMD分解方法处理后的各IMF分量、剩余信

表1 回转窑参数
号时域、频域图如图4~图6所示。
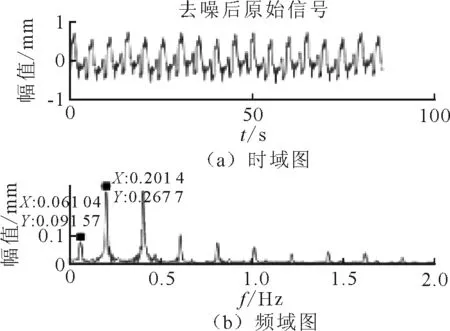
图3 一档右托轮时域、频域图
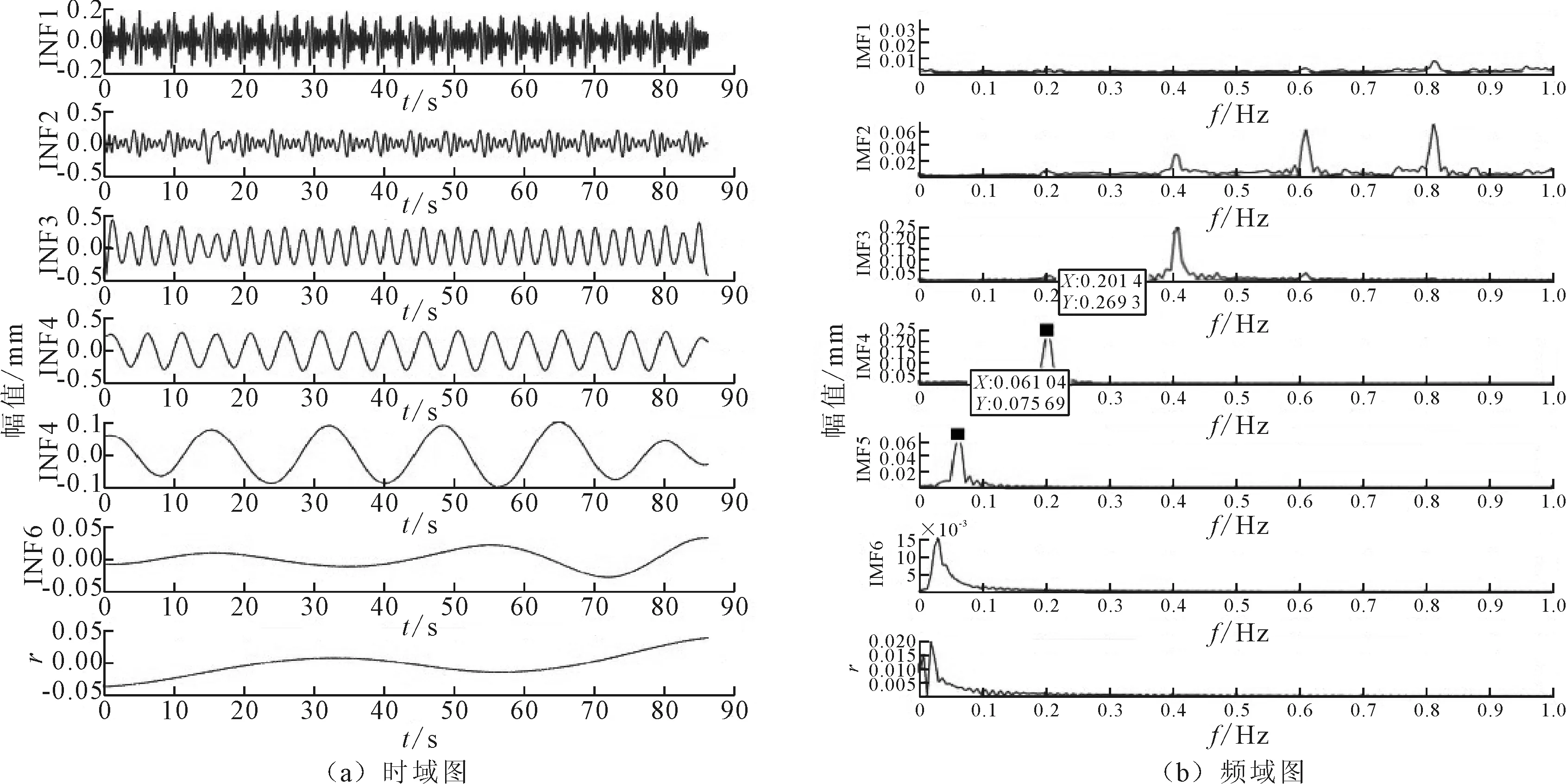
图4 EMD分解结果

图5 EEMD分解结果
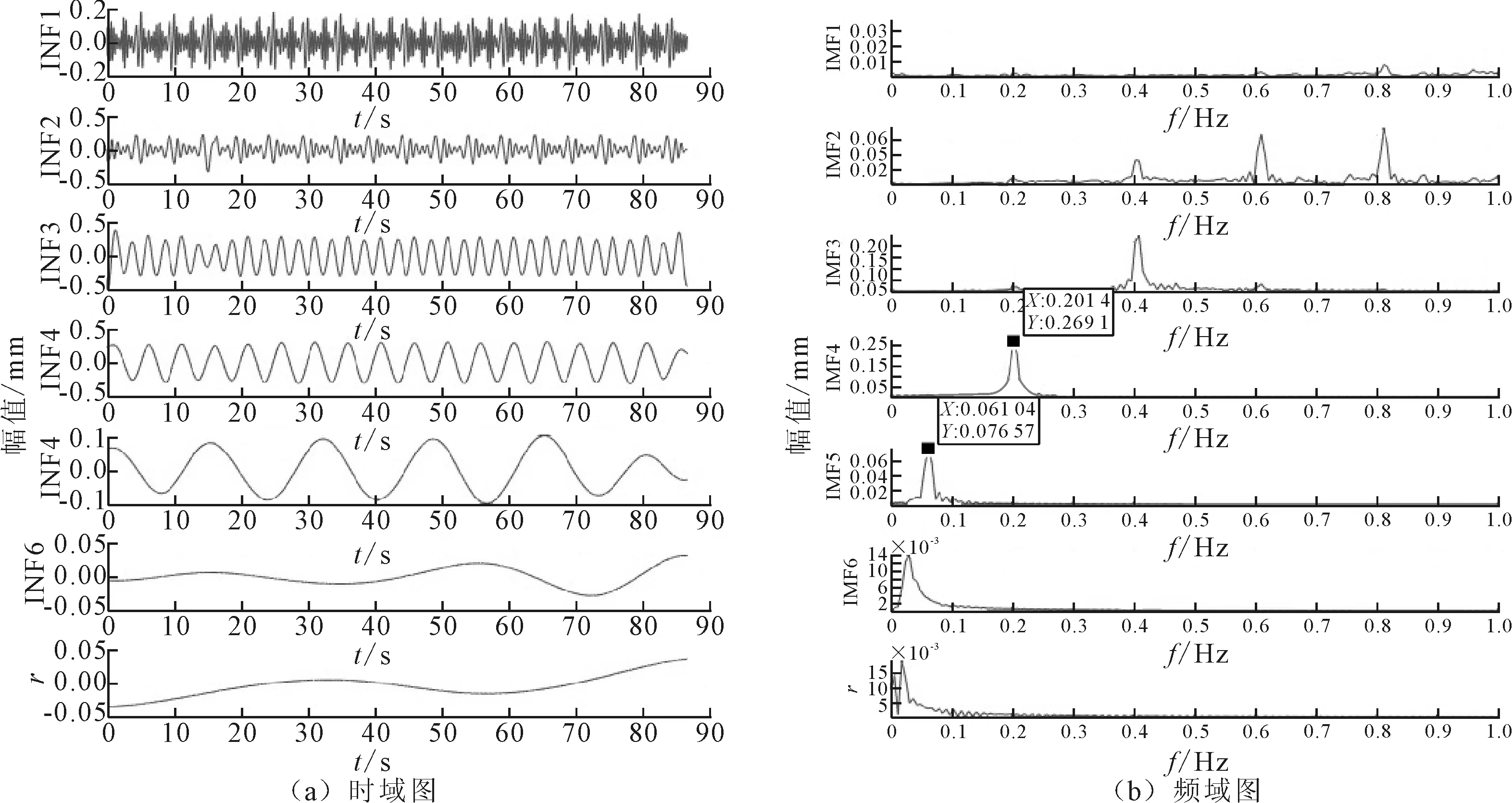
图6 MEEMD分解结果
由图4~图6可知,MEEMD有效抑制了EMD分解过程中带来的模式混叠,使波形更清晰,也减少了EEMD分解过程中可能出现的虚假分量,IMF4和IMF5为所提取的KR谐波和KS谐波,其对应的相关系数分别为0.619 7和0.198 5,也是3种方法中最高的。
2.3 特征向量构造
回转窑筒体运行状态分为4种运行状态,即正常状态、有中心线偏移无热弯曲、有热弯曲无中心线偏移和筒体热弯曲及中心线偏移均很严重。利用MEEMD分解得到的对应KS、KR谐波分量对信号进行重构,重构后可以准确表征筒体故障信息。计算重构信号的各类时域参数[9]及KS、KR谐波对应的幅值,将其组成特征向量作为后续支持向量机决策模型的样本输入。其中,时域参数中选择均值、标准差、均方根、峰值、偏度、峭度,这些参数可以表明托轮轴挠度信号中的幅值和能量变化情况(用F1~F6表示),此外,峰值因子、裕度系数、脉冲指标、波形因子也可以表明托轮轴挠度信号中的区间分布特性(用F7~F10表示),再加上KS、KR谐波幅值(用F11~F12表示)全面表征故障信息。故特征向量可以表示为:
FE=[F1F2…F12]
(13)
图7通过直方图对相应参数对回转窑筒体4种状态的影响程度进行对比。其中,由于各参数之间数值大小差异较大。为了更好地显示同种参数间的差异,对所有特征值进行归一化处理,其处理公式为:
(14)
式中:Xmin为同种特征参数的最小值;Xmax为最大值。
从图7可知,重构后信号的各项时域特征参数与经过MEEMD分解提取的KS、KR谐波幅值所构成的特征向量各个模式间区别明显,对后续进行的支持向量机模式识别十分有利。
3 SVM参数寻优
3.1 支持向量机理论
对于线性可分或者近似线性可分的情况,线性支持向量机在输入空间即可找到合适的超平面将训练样本正确分类,但是对于线性不可分的样本数据,就需要引入非线性支持向量机来进行分类[10]。其主要处理过程是通过非线性变换将输入样本转化到高维空间中,然后在这个空间内进行分类,即找到一个最优超平面将输入样本分类。通常这个转换十分复杂,但是考虑到上述对偶问题都只与训练样本之间的内积运算有关,同样高维空间内也只需要进行内积运算。根据泛函的相关理论,这里借助一种核函数来表示变换空间内的内积,此核函数满足Mercer条件即可。
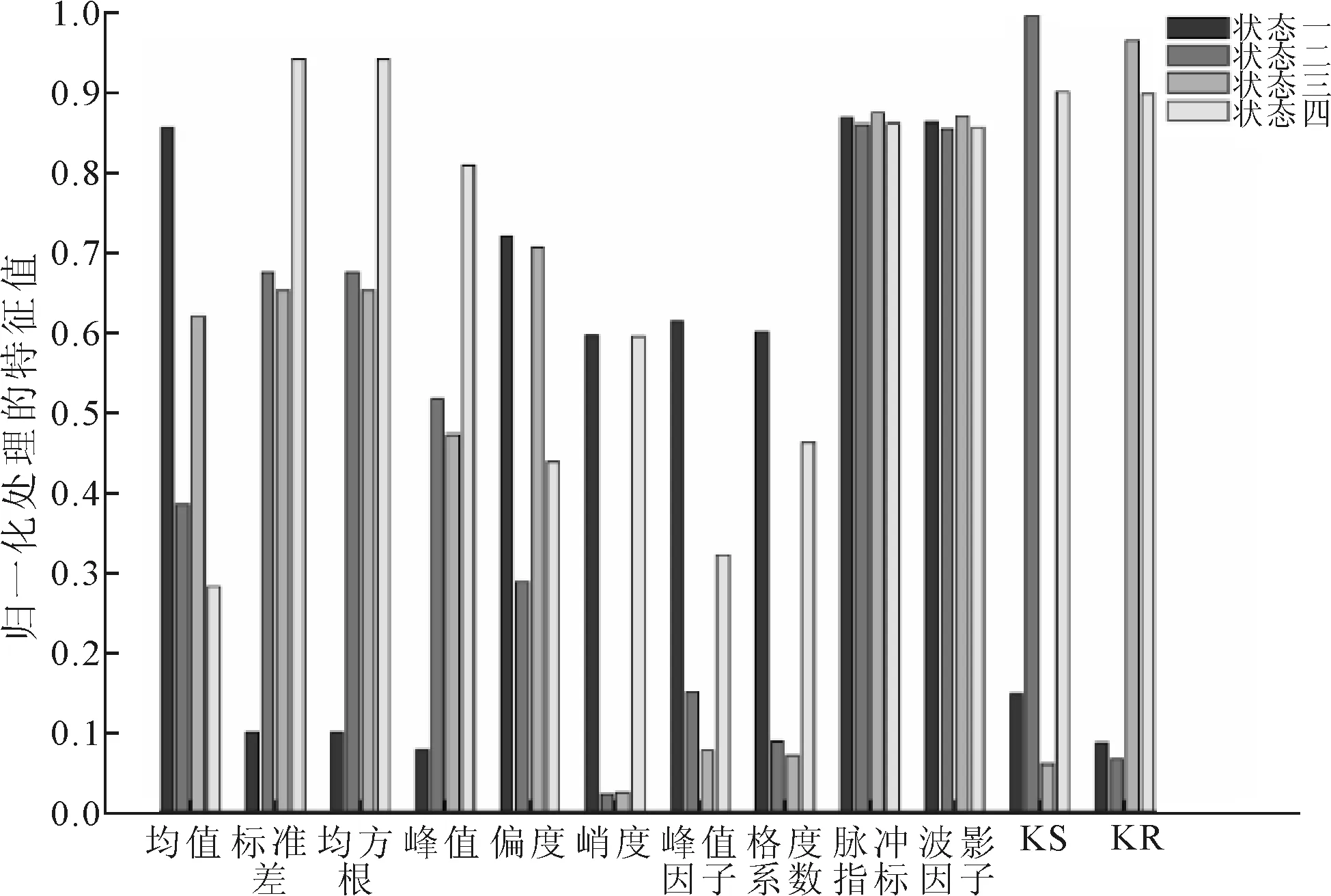
图7 各模式特征参数直方图
在非线性支持向量机中,常见的核函数如表2所示。
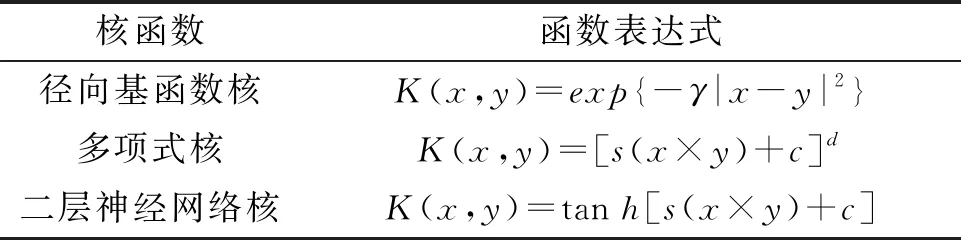
表2 常见的核函数
径向基核函数具有局部性强和参数选择约束少的优点,被分类模型广泛使用,故选用径向基函数作为支持向量机的核函数。
3.2 粒子群优化SVM参数
PSO(partical swarm optimization)算法是通过研究鸟类群体行为而产生的群体智能算法,算法将每个优化问题的解看作是给定搜索空间中的一只鸟,称为“粒子”,通过粒子追寻自身的个体最好位置和群体的全局最好位置的过程来实现最优解的查找[11]。其算法主要步骤如下:
(1)对粒子群的随机位置和速度初始化。
(2)计算粒子当前位置的适应度,并依次对当前个体最好位置和当前全局最好位置的适应度进行更新。
(3)更新粒子速度和位置。确定最优解并判断是否达到最大迭代次数,达到最大迭代次数即终止,若无,则重复步骤(2)和步骤(3)。
支持向量机SVM(support vector machine)的惩罚因子和核参数会极大影响支持向量机的分类精度[12],利用粒子群优化算法可以确定最适合本研究支持向量机分类模型的惩罚因子和核参数13]。通过训练,PSO-SVM的适应度曲线如图8所示,其中c1为PSO局部搜索能力的学习因子;c2为PSO全局搜索能力的学习因子。
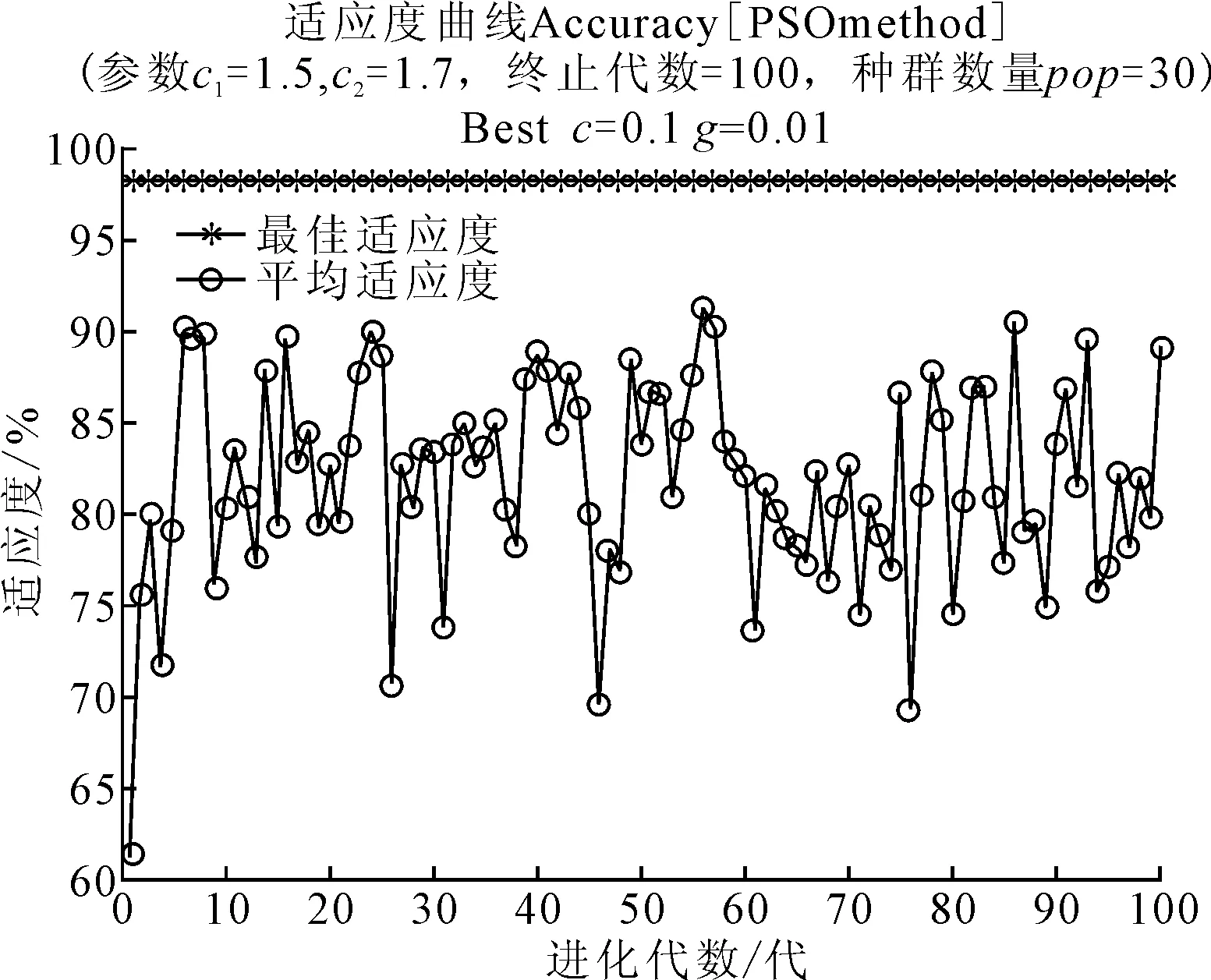
图8 PSO-SVM适应度曲线图
3.3 基于PSO-SVM的回转窑筒体故障识别
对于回转窑筒体的4种状态模式:正常状态、有中心线偏移无热弯曲、有热弯曲无中心线偏移和筒体热弯曲及中心线偏移均很严重,每一种选取25个样本,其中13组数据用于训练集,12组数据用于测试集。首先利用人工选择相关参数(惩罚因子设为1,核参数设为0.1)的支持向量机进行分类,其分类正确率如图9所示。
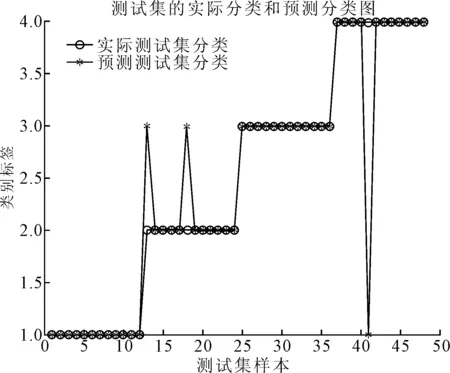
图9 参数未优化SVM分类正确率图
再利用PSO-SVM(种群数量设为20,迭代次数设为100)进行样本训练和测试,其分类准确率如图10所示,从图10可知,PSO-SVM的分类正确率更高。
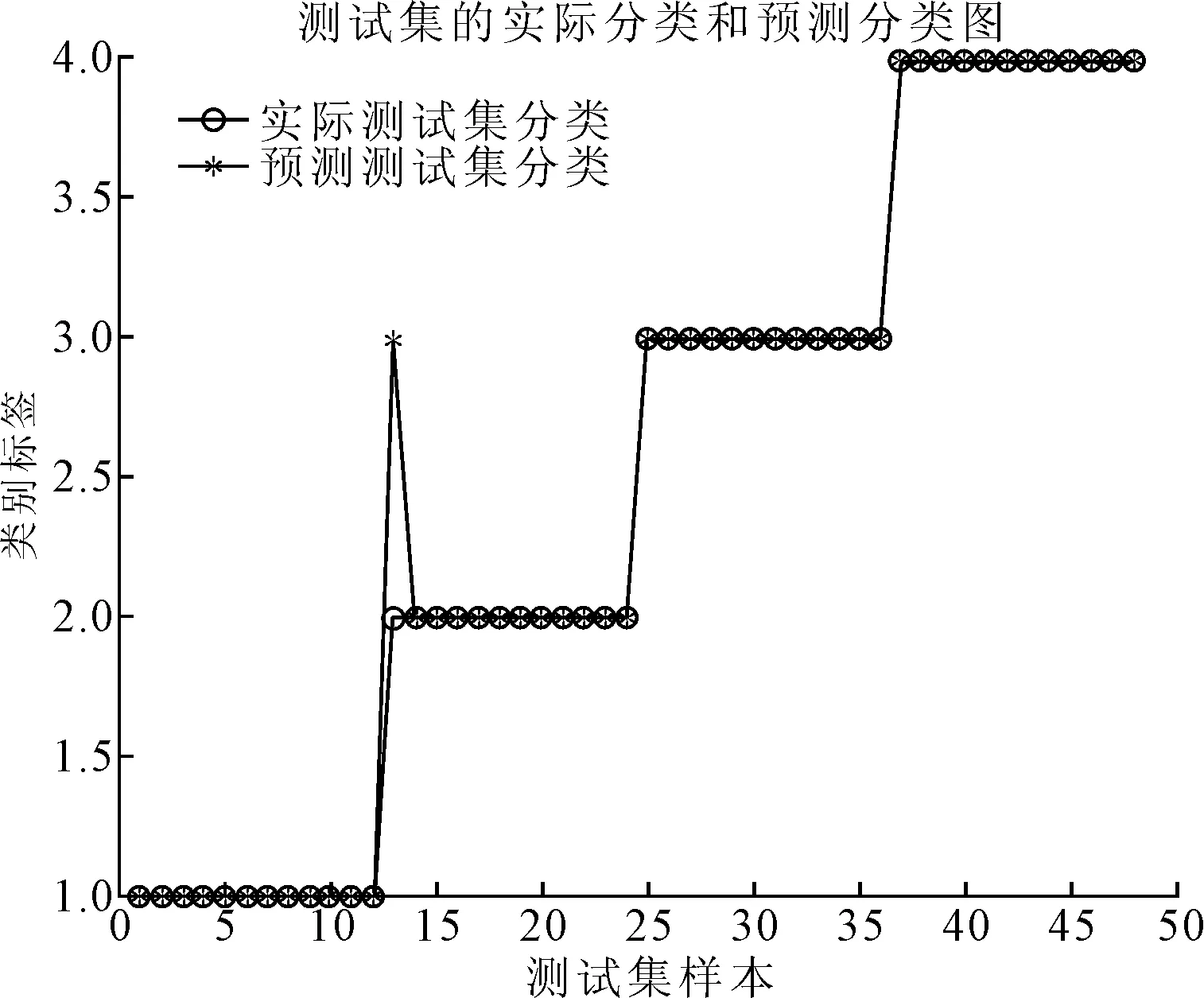
图10 PSO-SVM分类正确率图
4 结论
针对EMD模式混叠的缺陷,引入了改进的集合经验模式分解对托轮挠度信号进行分析,得到了分布更加合理的回转窑筒体的故障特征的信息。重构后信号的时域特征和KS、KR谐波幅值组成的特征向量可以更好地表征筒体的故障信息。通过利用PSO对支持向量机的惩罚因子和核参数进行优化可以避免人为确定参数的不确定性,有效提高SVM故障诊断的正确率。
猜你喜欢
科学导报(2023年13期)2023-03-08 02:26:44
水泥技术(2022年1期)2022-02-12 02:10:42
一重技术(2021年5期)2022-01-18 05:41:58
中小企业管理与科技(2019年34期)2019-12-23 01:03:46
设备管理与维修(2019年12期)2019-10-26 09:20:40
重型机械(2019年3期)2019-08-27 00:58:50
中学科技(2018年9期)2018-12-19 09:27:26
山东工业技术(2016年15期)2016-12-01 05:31:45
装备制造技术(2015年11期)2015-11-30 08:19:52
中国塑料(2015年1期)2015-10-14 00:58:42