
高速重载码垛机器人柔性动力学建模
2020-12-25 12:31芮执元刘清辉
机械设计与制造 2020年12期
芮执元,刘清辉
(1.兰州理工大学机电工程学院,甘肃 兰州 730050;2.兰州理工大学数字制造技术与应用省部共建教育部重点实验室,甘肃 兰州 730050)
1 引言
在现代工业生产中,码垛机器人已成为提高物流包装行业生产效率,改善其经济效益,解决其一系列技术问题的至关重要的一步。早在20 世纪70 年代末的时候,日本就已经将机器人技术用于码垛工艺方面,使得机器人码垛技术飞速发展[1]。铝锭码垛机器人的动力学分析,是提高其动态特性的基础。由于铝锭码垛机器人高速、大负载的工作特性,传统的刚性动力学分析已不能满足要求。而大负载的工作特性要求其机械臂的刚度远大于其减速输出轴的刚度,柔性主要集中在关节处。高速运动则使得关键部件的惯性(矩)增大,关节变形也随之增大,严重影响码垛机器人的稳定性和精度。
文献[2]从运动学的角度推导了关节型码垛机器人的关节参数。文献[3]给出了机器人拉格朗日建模的一般步骤,但这只是针对刚性动力学的研究,并没有考虑其柔性变形。文献[4]则通过Kane方法对码垛机器人进行动力学研究,也没有考虑其柔性变形的影响。而针对柔性机器人的动力学建模方法在文献[5]中有一定描述。文献[6]则针对码垛机器人考虑了其关节变形进行动力学分析,但并没有给出具体的推导过程。而文献[7]则仅仅是对码垛机器人进行柔性动力学的仿真分析。机构简化模型是动力学分析的基础,但上述工作均没有从具体的理论方法中探讨其机构简化的机理。因此从图论方法出发,在考虑末端负载的影响下对铝锭码垛机器人进行动力学分析,并对结果进行深入讨论。
2 码垛机器人整体结构
2.1 整机结构
该4 自由度码垛机器人结构包括基座、腰部回转结构、大臂摆动结构、小臂摆动结构以及手腕摆动结构,连杆2 为水平保持杆,连杆1、3、4、5 则是构成闭环结构的辅助运动杆,如图1 所示。
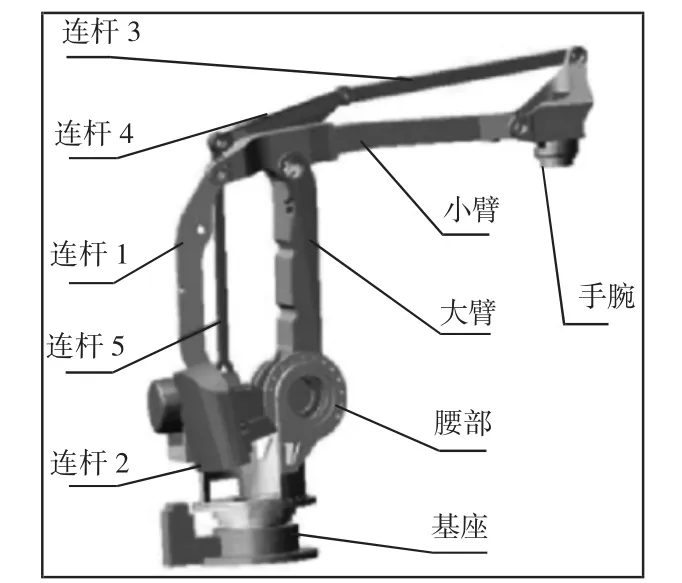
图1 码垛机器人模型Fig.1 Model of Palletizing Robot
该码垛机器人应用于28t/h 铝锭连铸生产线的末端,将传输链上冷却好的铝锭层按层码垛,每层大约(4~5)块铝锭,每垛11层。码垛机器人每次运行抓取一层铝锭,负载达300kg、码垛速度3.8m/s,转运距离达到3.15m,每分钟搬运次数在8 次左右。码垛机器人一个工作周期大约为8s,其工作过程包括抓取、运动至指定位置、堆放成垛、运动回初始位置。其运动具有一定的重复性,每次的启动和停止都会对码垛机器人产生不同程度的冲击影响。
2.2 结构的图论描述
在简化码垛机器人的模型的基础上,以文献[8]的图论法描述码垛机器人的树状结构图,即用一个有向图来表示码垛机器人的机构,如图2 所示。有向图的顶点表示各个部件刚体,记作Bi(i=1,2,3,4,5)。联结顶点的有向弧则表示联结铰,记作Oj(j=1,2,3,4,5,6,7)。其中表示基座,为运动已知的系统外刚体。
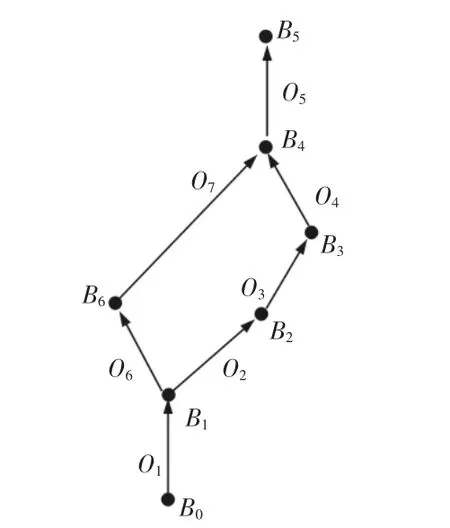
图2 码垛机器人树状结构图Fig.2 Tree Structure Diagram of Palletizing Robot
从图2 可以看出该码垛机器人的结构从刚体B0到刚体B5呈递推结构,其运动和力(矩)具有传递性。而左右两端虽然经过的铰和刚体是不同的,但最终对末端的影响是一致的。其简化模型的铰的数量比刚体数量多一个,构成了局部闭环结构。因此在简化模型时应对O7铰进行切断,将整体模型化为两个子支链,再对其分别进行计算后综合结果,避免局部闭环结构使结果出现耦合。
3 码垛机器人动力学建模
3.1 结构简化模型
将其腰部回转结构、大臂摆动结构、小臂摆动结构以及手腕摆动结构依次记作为关节1、关节2、关节3、关节4,并综合上述图论分析的结果,确定码垛机器人整体结构模型和各个支链结构,如图3 所示。
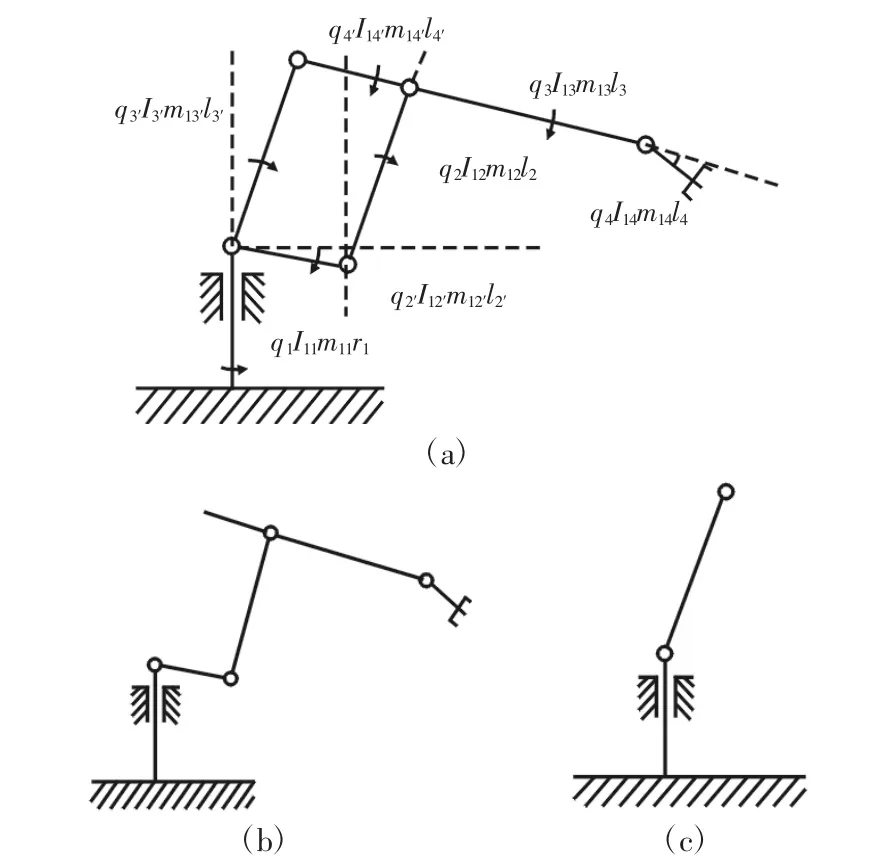
图3 码垛机器人整体结构及支链模型Fig.3 Structure and Branch Chain Model of Palletizing Robot
根据其具体结构和运动副确定的整体结构简化模型,如图3(a)所示。其中qi(i=1,2,3,4)表示关节转角,li(i=2,3,4,2′,3′,4′)表示连杆长度,mli(i=1,2,3,4,2′,3′,4′)表示机器人各部分质量Ili(i=1,2,3,4,2′,3′,4′)表示转动惯量,r1则是指腰部的回转半径。由图论分析确定的结构右支链和左支链,则是分别由图3(b)和图3(c)所示。由于码垛机器人在大负载时,其机械臂的刚度远大于减速器输出轴刚度,其柔性主要集中在关节处。因此在文献[9]的柔性关节模型基础上,以一个线性扭簧来表示减速器输出轴柔性,确定柔性关节模型,如图4 所示。图中:Ni—减速器减速比;τi(i=1,2,3,4)—电机的输出转矩;Jmi(i=1,2,3,4)—电机转子转动惯量;ki(i=1,2,3,4)—线性扭簧的刚度,由减速器输出轴刚度决定。
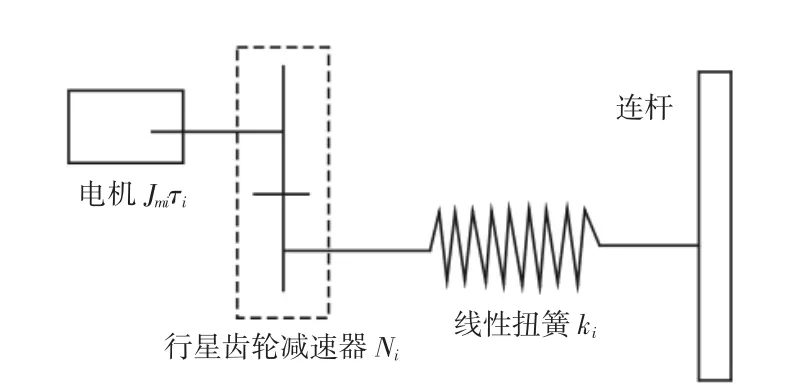
图4 柔性关节模型Fig.4 Flexible Joint Model
3.2 动力学方程
该码垛机器人为4 自由度的码垛机器人,确定其广义坐标为关机转角qi(i=1,2,3,4)和减速器转角θi(i=1,2,3,4)。由于码垛机器人在大负载情况下工作,因此考虑末端载荷对系统动态特性的影响。由码垛机器人结构条件可知其局部闭环结构类似平行四边形,可推导得变量关系:q3=q4=q3,q2=q2-q3。Hamilton 原理[10]表示在某一段时间中真实运动的积分为0,相比于拉格朗日方程具有更普遍化的形式,适用于任何动力学问题,其表达式为:

式中:δT—系统动能;δU—系统势能;δW—广义力做功的变分。分别对左、右支链进行计算,得连杆1 动能:

连杆2′的动能:

连杆2 的动能:
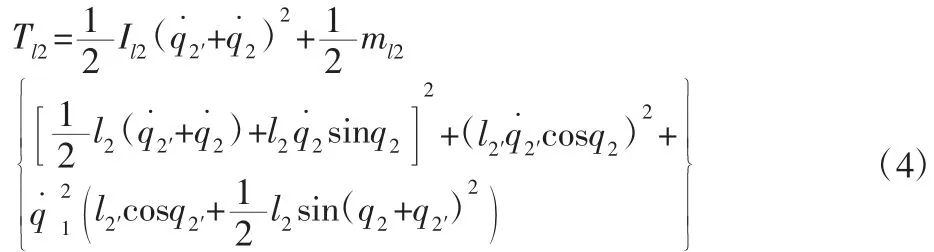
连杆3′的动能:

由上式递推可得连杆动能Tl3、Tl4、Tl4′以及末端负载的动能Tm、电机转子动能Tm1、Tm2、Tm3、Tm4;同理可得其中连杆势能总和Ugi以及电机势能总和Ugm末端负载势能Um、弹性势能为Uk。不考虑外部扰动和摩擦等因素,广义力为电机的驱动力,分别记作τ1、τ2、τ3、τ4,则总的动能:

式中:(i=1,2,2′,3,3′,4,4′),(j=1,2,3,4)。

总的广义力做的功:

将式(6)~式(8)分别带入式(1)可得系统的运动方程:

式中:J—电机转动惯量矩阵;S—关节柔性和大范围运动的耦合矩阵;K—减速器刚度矩阵;M(q)—质量矩阵;ST—耦合矩阵转置—阻尼矩阵;G(q)—重力加速度矩阵。
4 柔性动力学分析
4.1 主要参数及仿真工况
为了确定高速重载工况下柔性关节变形对码垛机器人动态响应的影响,确定仿真条件:
(1)设置步长为0.01,求解区间为一个工作周期[0,8]。
(2)通过decic 函数计算与D-H 参数一致、连续的初始条件。
(3)确定末端负载为额定载荷300kg。
码垛机器人主要动力学参数,如表1 所示。
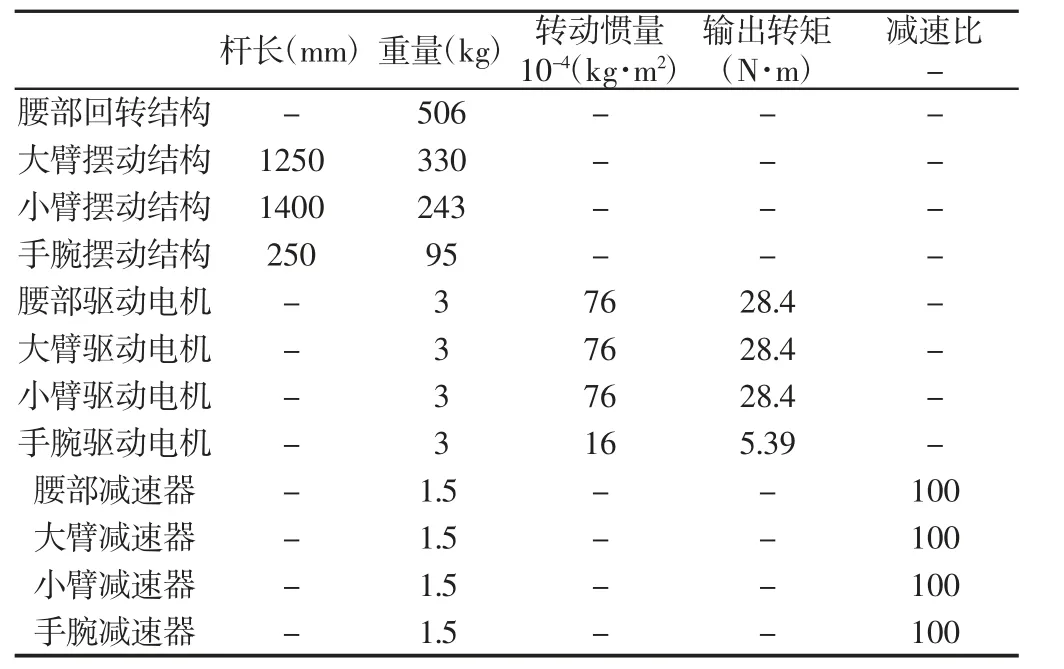
表1 码垛机器人主要动力学参数Tab.1 Main Dynamic Parameters of Palletizing Robot
4.2 小臂关节柔性动力学分析
在Matlab 里通过ODE 求解器对上述动力学方程进行数值求解,求解算法为五阶隐式龙库塔法。小臂关节作为码垛机器人的关键承载部件,在大负载情况下末端的负载将对具有柔性的小臂关节产生直接影响。因此重点针对码垛机器人的小臂关节进行分析,求解得小臂关节的运动参数,如图5 所示。
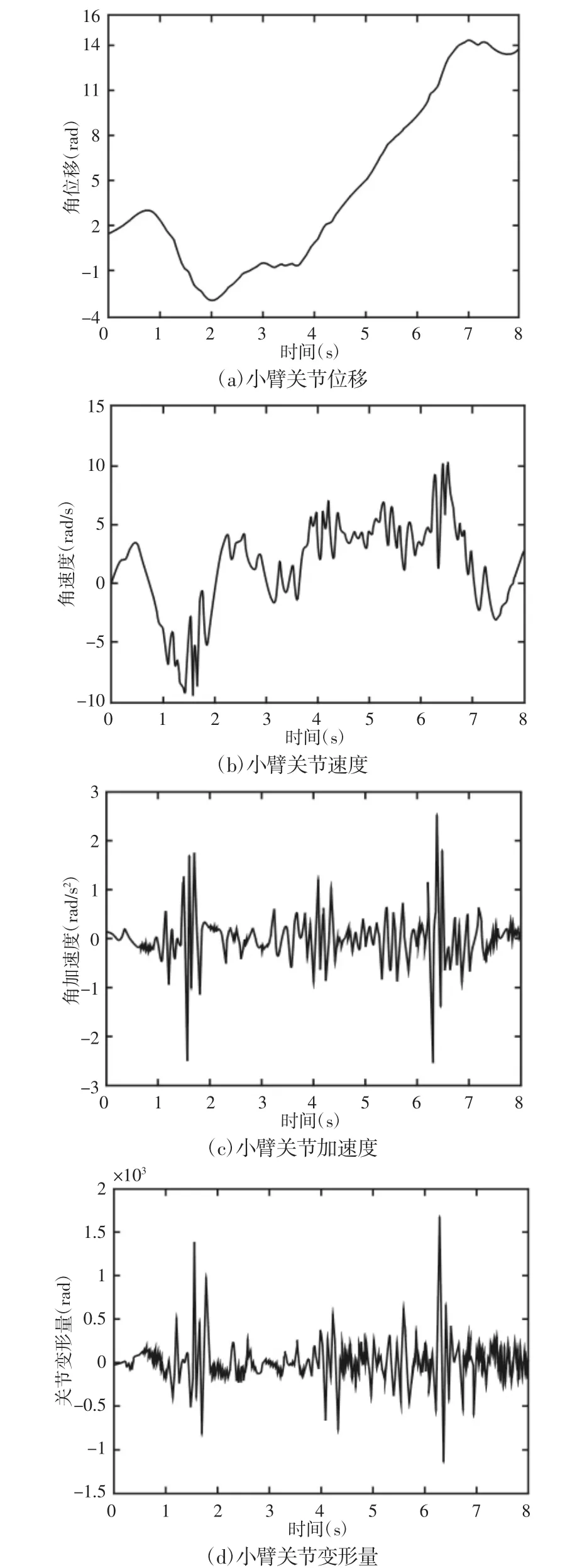
图5 小臂关节的运动参数Fig.5 Motion Parameters of the Lower Arm Joint
图5(a)中可以看出在码垛机器人启动和停止时位移有较大变化,且(0~4)s 和(4~8)s 的运动情况一致。图5(b)中速度的波动在1.5s 和6.5s 处较大,速度和位移在一个工作周期内具有对称性。图5(c)中加速度的最大值出现在1.5s 和6.5s 处。从图5(d)中可以看出关节变形量最大值为0.002rad,关节变形量的数量级为×103,变形为微小变形。联合图5(c)和图5(d)中关节变形曲线和角加速度曲线,加速度变化和关节变形的变化具有一致性,其峰值位置处于抓取和堆放时。
综合图5 可得:
(1)在一个工作周期内,码垛机器人(0~4)s 和(4~8)s 的运动具有对称性和重复性,其速度和加速度变化具有一致性,运动的方向相反,但末端的轨迹一致。
(2)码垛机器人启动和停止时加速度达到峰值,此时小臂关节承受的惯性力(力矩)最大,关节变形最大,码垛机器人末端定位精度将受到严重的影响。
(3)码垛机器人虽然末端承受额定载荷300kg,但是影响其关节振动和柔性的主要因素仍是启动和停止时的关节惯性力(力矩)的冲击。
5 结论
(1)针对铝锭码垛机器人工作时高速、大负载的工作特性,通过图论方法阐述机器人结构模型简化的机理,为动力学建模提供基础。
(2)在考虑关节变形和末端载荷的基础上,通过Hamilton 原理对动力学方程进行了详细的推导。
(3)对小臂关节的动力学结果进行分析,指出速度瞬时突变产生的冲击是铝锭码垛机器人小臂关节变形的主要因素。小臂关节的柔性变形是影响码垛机器人末端振动和定位精度的主要因素,为更准确、平稳的控制方案提供了理论基础。
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
装备制造技术(2020年3期)2020-12-25
商品与质量(2020年23期)2020-11-26
重型机械(2020年3期)2020-08-24
安徽电子信息职业技术学院学报(2020年2期)2020-05-13
化工管理(2020年15期)2020-01-13
制造技术与机床(2019年12期)2020-01-06
电子制作(2019年20期)2019-12-04
组合机床与自动化加工技术(2019年5期)2019-05-24
世界有色金属(2019年14期)2019-02-10
