
基于电流预测控制的BLDCM换相转矩脉动抑制方法
2020-12-23 12:28:10王日茗杨建飞王浩亮王志伟樊温新
微特电机 2020年12期
王日茗,杨建飞,2,邱 鑫,2,王浩亮,王志伟,樊温新
(1.南京师范大学 电气与自动化学院,南京 210046; 2.南京智能高端装备产业研究院有限公司,南京 210042;3江苏远东电机制造有限公司,泰州 225500)
0 引 言
无刷直流电动机(以下简称BLDCM)由于其结构简单、功率密度高、成本低等优点,非常适用于各种工业应用,受到了研究人员的广泛关注[1-4]。然而,由于定子电感和有限的直流电压限制了换相过程相电流的快速变化,导致在换相过程中产生转矩脉动。而换相转矩脉动过大又会导致电机振动和噪声,极大限制了BLDCM的应用[5-6]。
由于以上原因,BLDCM换相转矩脉动抑制一直是热点研究问题[7-16]。文献[7]分析了换相转矩脉动成因,并指出保持非换相相电流恒定,可以抑制转矩脉动。文献[8]通过对电压扰动进行补偿,使非换相相电压保持恒定,从而使该相电流保持稳定。但是这种方法在高速范围适用性差,针对宽速范围换相转矩脉动抑制,许多学者也进行了深入研究。文献[9-11]采用可调变换器来调节输入电压。文献[9]中,BLDCM在正常导通期间由直流电源供电,同时,由Sepic转换器调节换相过程所需电压,从而实现全速范围内的换相控制。文献[10]增加Cuk转换器来改变逆变桥的输入电压。Cuk变换器在正常导通期间工作在buck模式,在换相期间通过开关选择电路将Cuk变换器的输出模式转换为升压模式,从而保持非换相相电流稳定。文献[11]提出一种Z源逆变器的换相转矩脉动抑制策略,通过引入矢量方法来提高直流电压。上述方法存在硬件开销大的问题,难以实现实用化。文献[12-13]将电机转速划分为低速、高速两个区间,根据这两个区间在换相过程分别采用不同的控制策略来抑制转矩脉动。文献[12]中,低速段对非换相和关断相进行PWM调制,高速段对关断相进行PWM调制。文献[13]中,低速段采用两相导通方式,高速段采用两相导通和三相导通相结合的控制方式,根据不同的转速范围选择不同的电压矢量。这些方法虽然能够抑制全速范围换相转矩脉动,但是换相瞬间具有控制上的滞后性,难以对转矩进行实时补偿。为解决这一问题,预测控制方法得到广泛应用。文献[14]提出了一种基于有限状态模型的预测控制方法,该方法根据非换相相电流预测模型和代价函数选择最优开关状态,但是模型建立过于复杂。文献[15]采用电流预测控制对BLDCM的进行控制,但是对预测电流的给定值计算过程中进行了估算,计算过于粗糙。文献[16]在BLDCM直接转矩控制换相转矩分析过程中引入了三相交流电机分析过程使用的坐标变换理论,得到换相电流和换相时间的相关约束,最后使用图解法实现换相转矩脉动抑制。但是该方法使用的坐标变换增加了计算复杂度,并且在公式推导过程使用到电感参数,而实际电机电感难以精确测量,导致算法实现更加困难,算法有待优化。
由于直接转矩控制(以下简称DTC)有优异的转矩响应性能,大量学者对其展开了深入研究[17-20],文献[17]通过选择6个电压矢量和零矢量建立了传统6扇区BLDCM DTC矢量控制方案。文献[18]发现由于二极管续流,传统全关断零矢量作用效果相当于反矢量。文献[19]重新构造了BLDCM DTC零矢量,消除了二极管续流现象,同时建立了一种12扇区BLDCM DTC控制方案,有效消除了关断相电流,较大降低了转矩脉动。文献[20]在此控制方案基础上加以延伸,提出了12扇区BLDCM DTC占空比控制方法,其对非换相期间和换相期间转矩脉动都具有较强抑制作用。本文在此12扇区BLDCM DTC占空比控制方法基础上进行换相转矩脉动控制研究,提出一种以转矩控制环输出为预测电流给定的换相转矩脉动抑制策略。仿真验证了此算法的有效性。
1 两相导通BLDCM DTC数学模型
两相导通控制方式下,具有理想梯形反电动势波形的BLDCM能够得到最大转矩输出。BLDCM反电动势和电流波形图如图1所示。图1中,ea,eb,ec表示定子相反电动势;ia,ib,ic表示定子相电流。
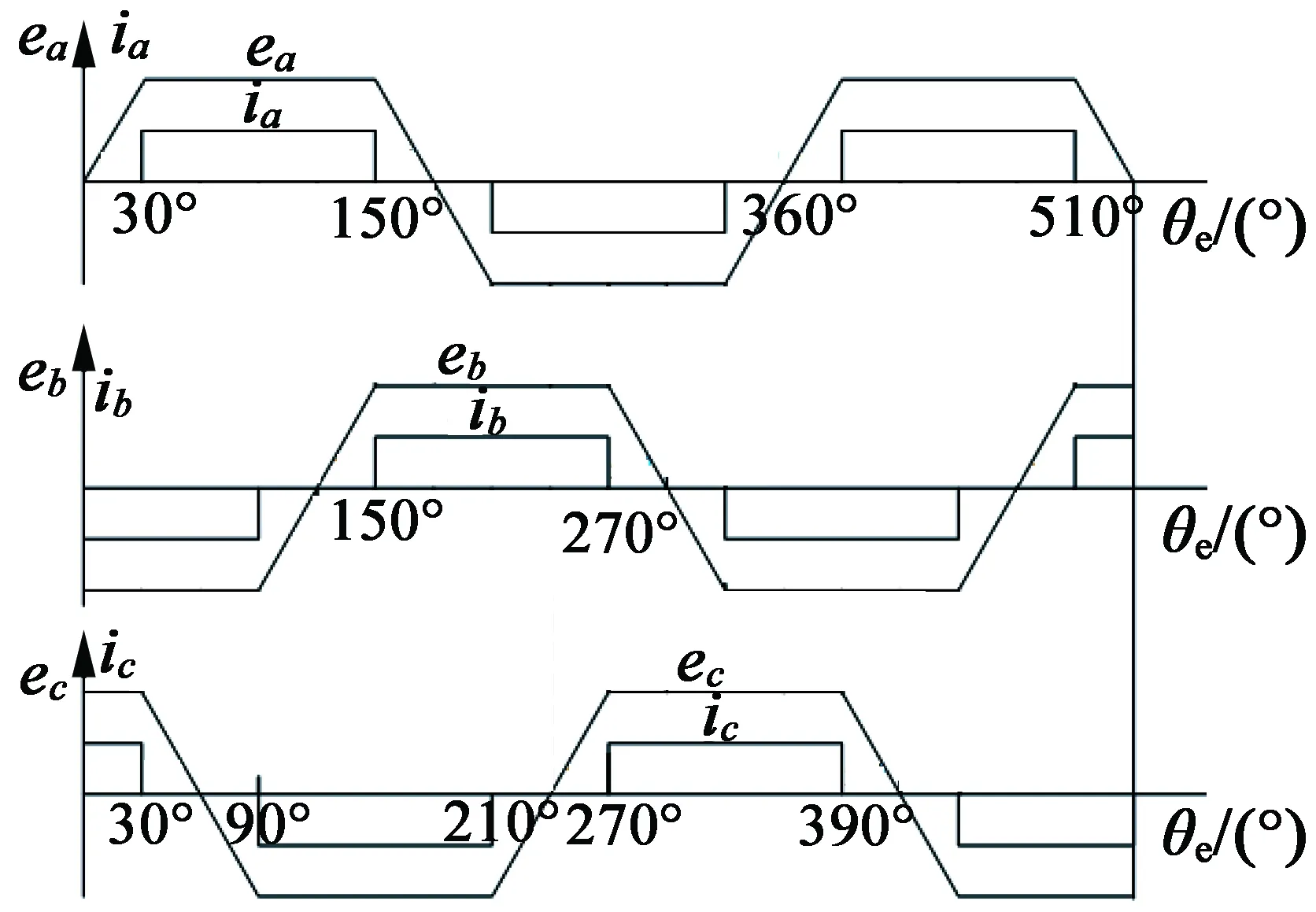
图1 BLDCM三相反电动势和电流波形
对于定子采用三相星型、无中线连接的BLDCM,其与电压型逆变器等效电路如图2所示。
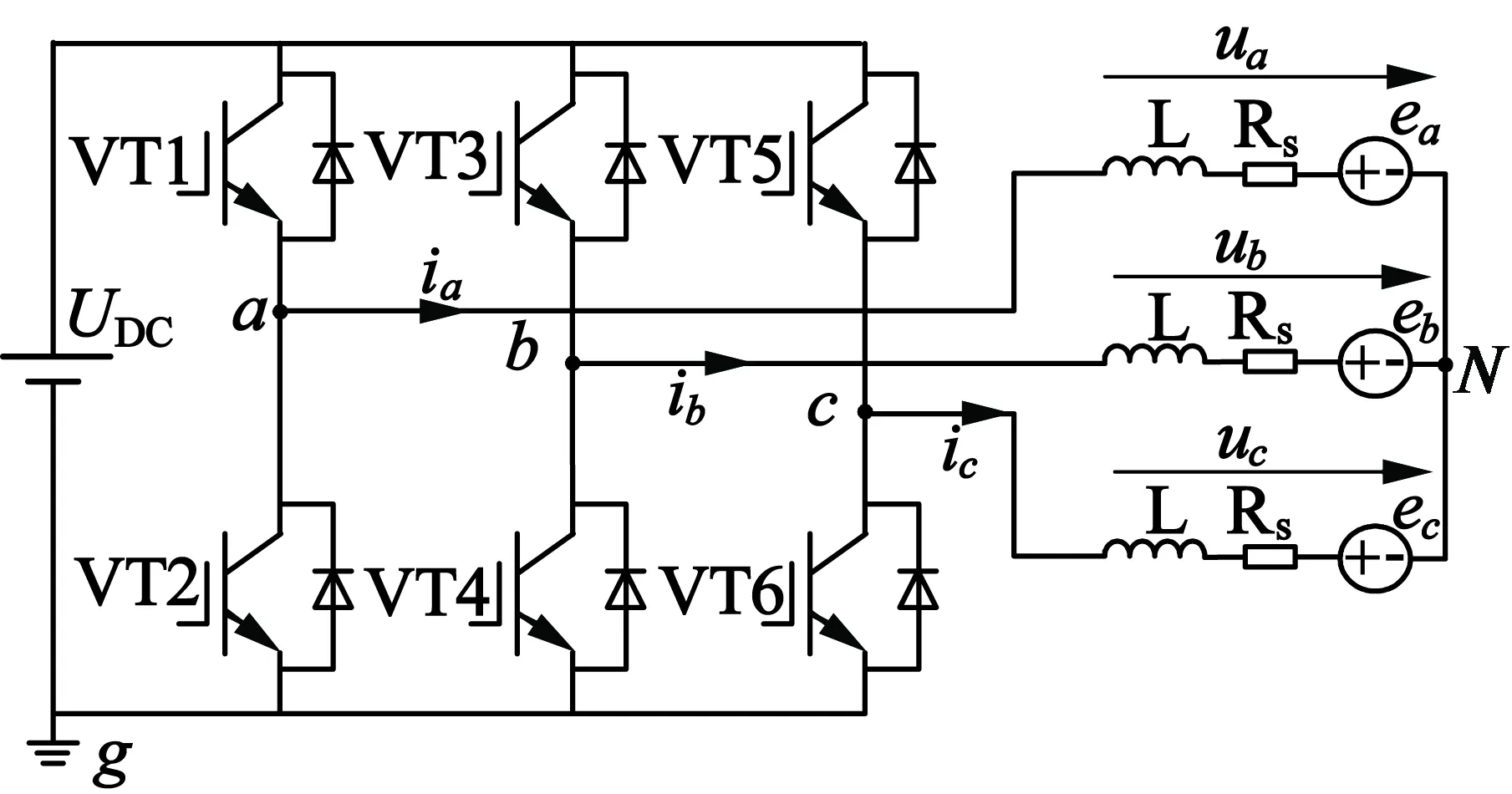
图2 BLDCM与逆变器等效电路图
其中,VT1~VT6表示6个开关管;ua,ub,uc为定子三相电压;Rs,L为定子每相电阻与等效电感;UDC为直流母线电压;N为中性点;g为直流母线地。
定子绕组采用星型接线的BLDCM端电压测量简单,其端电压方程:

(1)
uag,ubg,ucg分别表示三个端点的对地电压;Rs是定子相电阻;ia,ib,ic是定子三相电流;LM是定子等效电感;ea,eb,ec是三相反电动势;ung表示中性点对地电压。
转矩方程:
(2)
式中:Te表示电机转矩;Ωr表示转子机械角速度。
本文算法是基于12扇区BLDCM DTC占空比控制方案,将电机旋转360°电角度周期分为6个大扇区,每个大扇区根据不同零矢量划分为2个小扇区,矢量选择表如表1所示。
表1中,τ为转矩状态信号,τ=1是转矩增加信号,τ=0是转矩减小信号。Vxy为零矢量,其中x表示开关管导通状态:7表示导通两个上桥臂开关管,0表示导通两个下桥臂开关管;y表示扇区:由于4、5、6大扇区分别与1、2、3大扇区的零矢量开关状态一致,因此统一采用1、2、3大扇区内的零矢量标定,不再另行编号。

表1 BLDCM DTC 12扇区矢量选择表
2 两相导通BLDCM换相转矩脉动分析
由于相电感的存在,实际电机在换相时,导通相与关断相的电流变化率不同,导致非换相相电流波动,从而引起换相转矩脉动。换相过程电流转矩可能出现如图3所示的情况。

(a) 低速段

(b) 高速段
低速段,开通相电流上升速度大于关断相电流下降速度,导致换相转矩脉动。通过对开通相进行PWM斩波控制,抑制开通相电流上升速度,强制其与关断相电流下降速度相等,进而达到抑制换相转矩脉动的目的,同时,采用电流预测算法解决控制滞后的问题。
以A+C-到B+C-换相过程为例,换相过程开关状态和电流方向如图4所示。
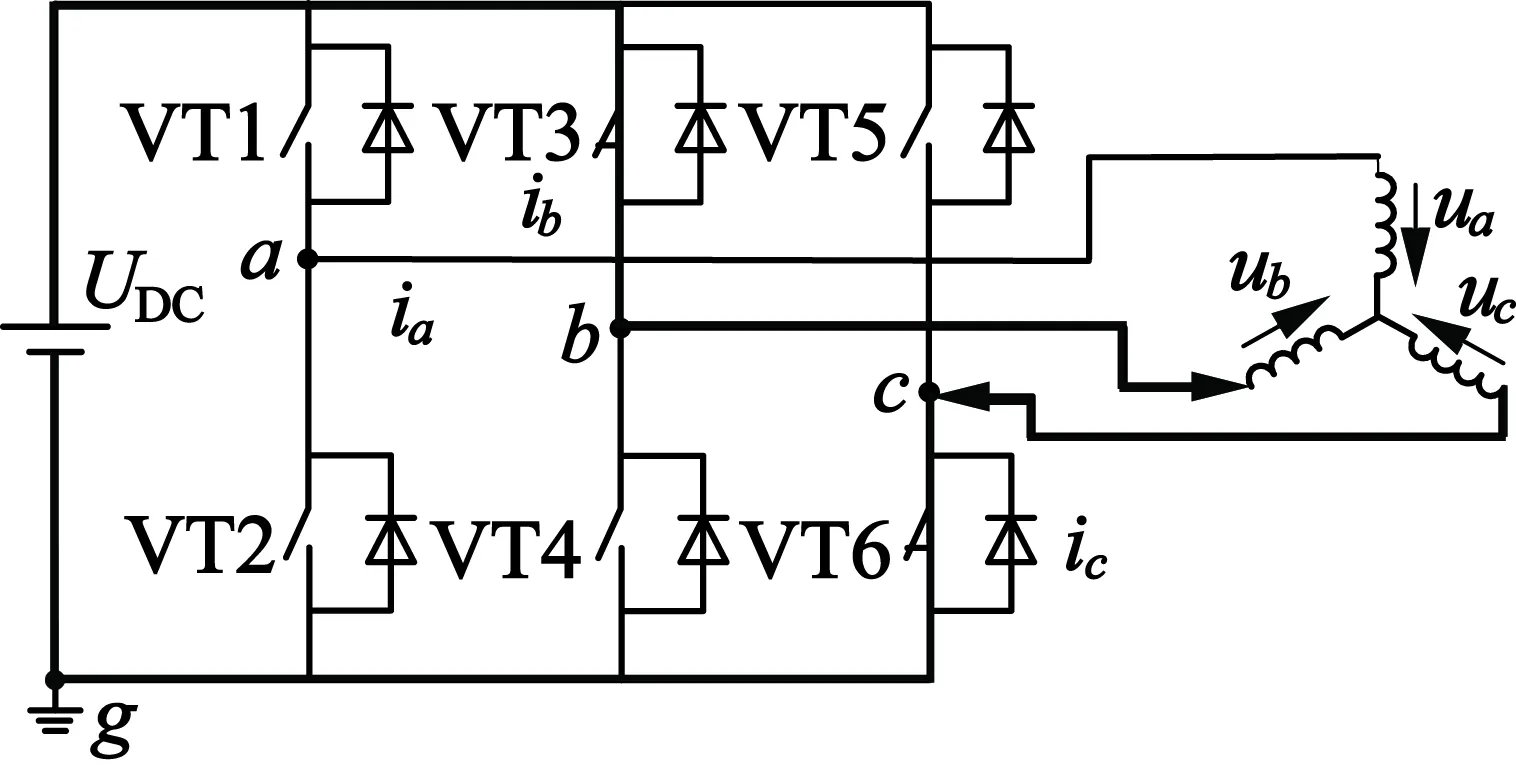
(a) 换相期间开通相导通
(b) 换相期间开通相关断
列写三相电压方程:
(3)
式中:Ua,Ub,Uc是定子三相相电压;D1为开通相占空比。由式(3)可得:
(4)
式中:Uac,Ubc为两相线电压;E为反电动势峰值,由式(4)可得:
(5)
要使换相期间转矩稳定,三相电流变化率需满足:
(6)
所以开通相占空比公式:
(7)
对式(7)进行离散化,可得:
(8)

(9)
式中:Ka=E/Ωr为反电动势系数。故非换相相电流预测值:
(10)
下一周期开通相预测占空比又可写:
(11)
高速段,开通相电流上升速度小于关断相电流下降速度,导致换相转矩脉动。此时开通相常开,通过对关断相进行PWM斩波控制,延迟关断相电流下降速度,强制其与开通相电流上升速度相等,进而达到抑制换相转矩脉动的目的;同时,采用电流预测算法解决控制滞后的问题。
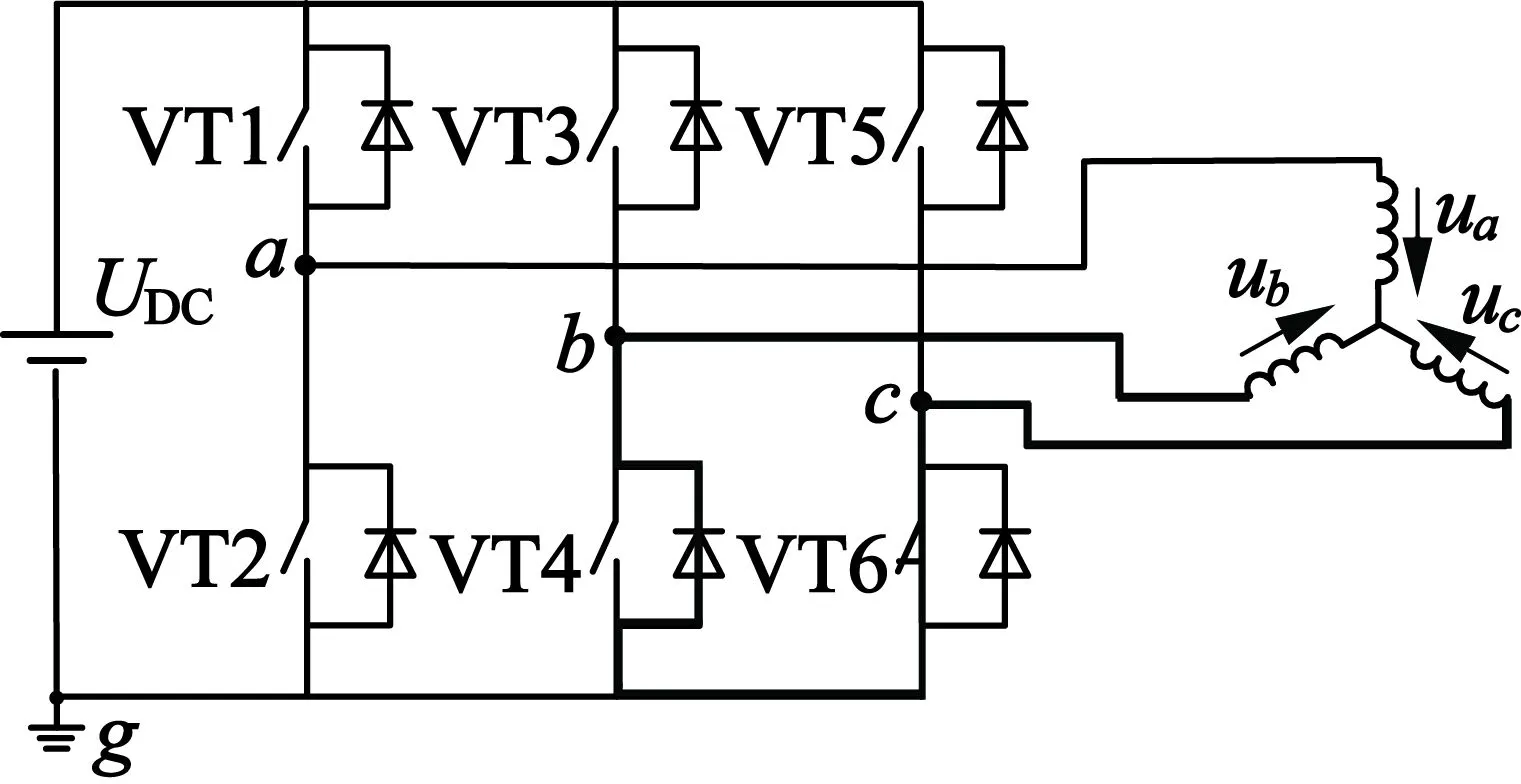
仍以A+C-到B+C-换相过程为例,换相过程开关状态和电流方向如图5所示。

(a) 换相期间关断相导通

(b) 换相期间关断相关断
列写三相电压方程:
(12)
同理,经过离散化可预测下一周期关断相占空比:
(13)
又可写为:
(14)
系统采用纯转矩环控制,控制框图如图6所示。
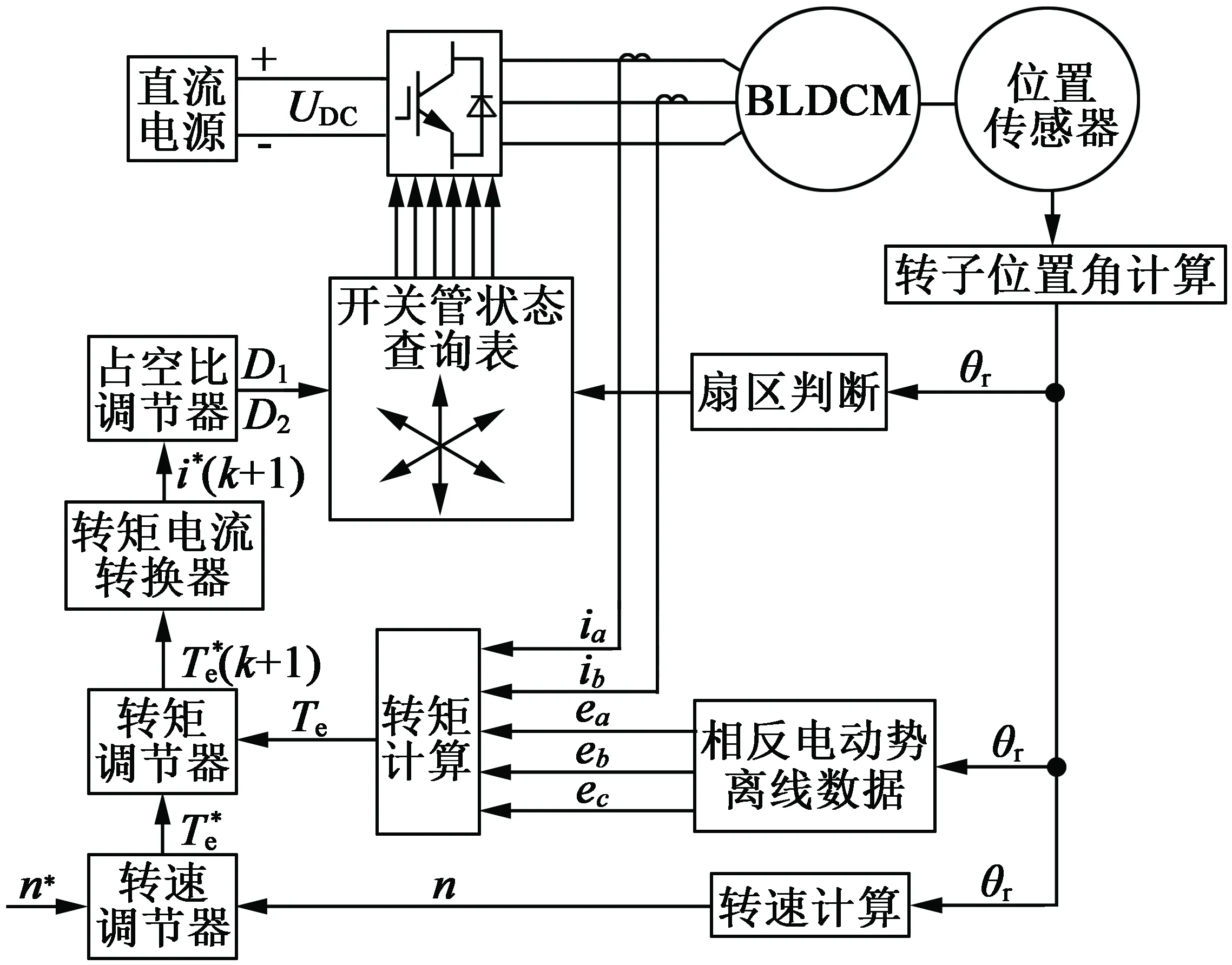
图6 BLDCM DTC控制框图
3 仿真验证
为验证理论分析的正确性,使用MATLAB/Simulink进行仿真建模分析,仿真控制周期60μs,BLDCM模型参数如表2所示。
表2 BLDCM参数
仿真在额定转矩(1.88N·m)下进行,分低速(100r/min)和高速(800r/min)两组分别进行,验证电流预测控制算法对换相转矩脉动的抑制效果。对比仿真为12扇区BLDCMDTC占空比控制算法(下称传统控制方法),其本身对换相转矩脉动就具有较强抑制作用。
额定负载1.88N·m,低速100r/min时,对比图7(a)和图8(a)转矩波形可知,电流预测控制方法下,换相转矩基本无脉动;对比图7(c)和图8(c)转矩、占空比、电流放大波形可知,传统控制方法下,换相占空比开始响应时刻比换相开始时刻延迟了1个控制周期,如图7(c)所示,这种控制上的滞后性,导致开通相过调制,开通相完全开通时刻比关断相完全关断时刻延长了2个控制周期,如图7(c)所示,最终导致转矩坠落;而电流预测控制方法下,换相占空比开始响应时刻和换相开始时刻相同,如图8(c)所示,其控制具有良好的跟随性,开通相完全开通时刻和关断相完全关断时刻相同,如图8(c)所示,换相转矩保持稳定。
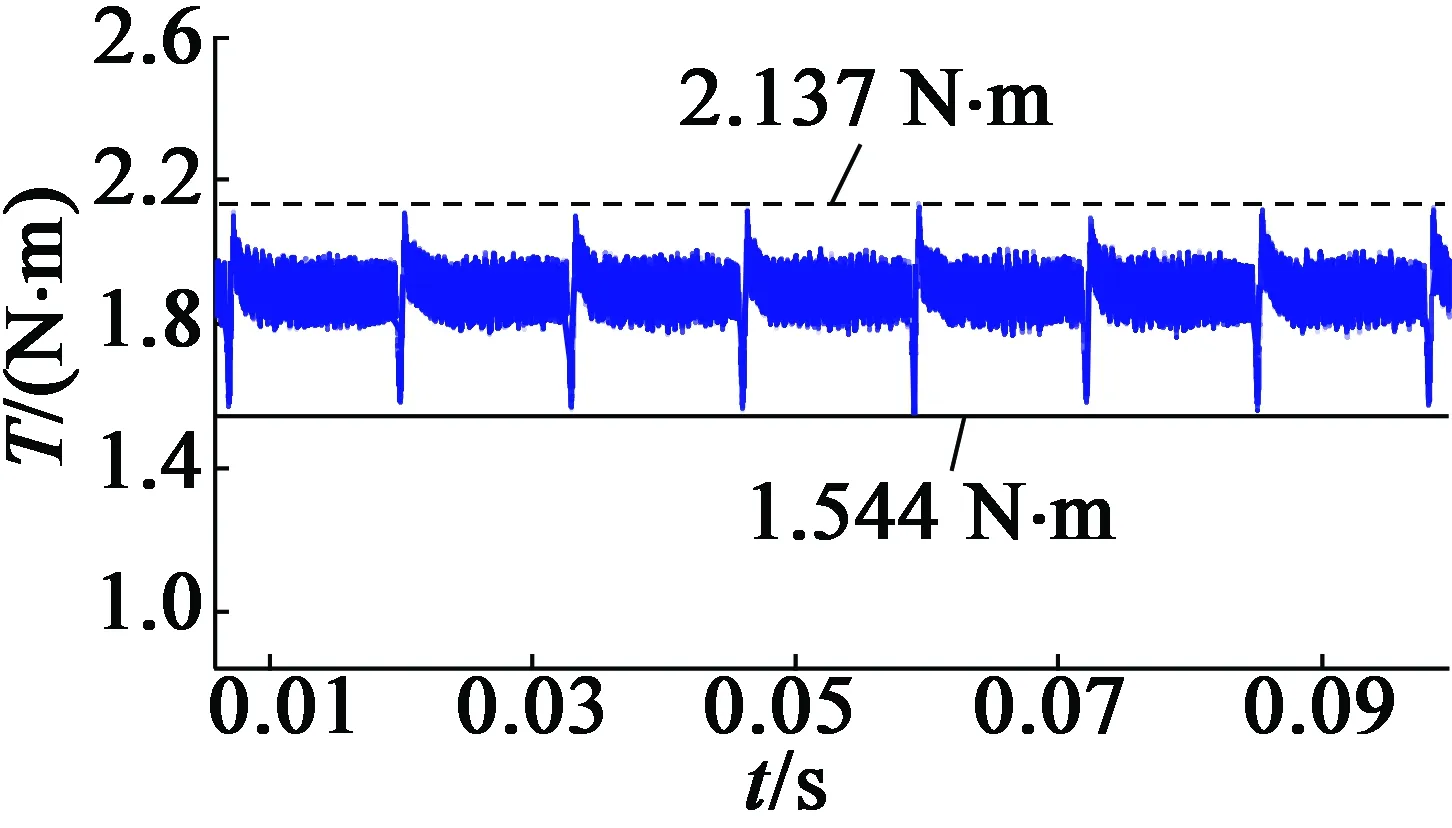
(a) 传统控制方法转矩波形
(b) 传统控制方法转矩、占空比、电流波形
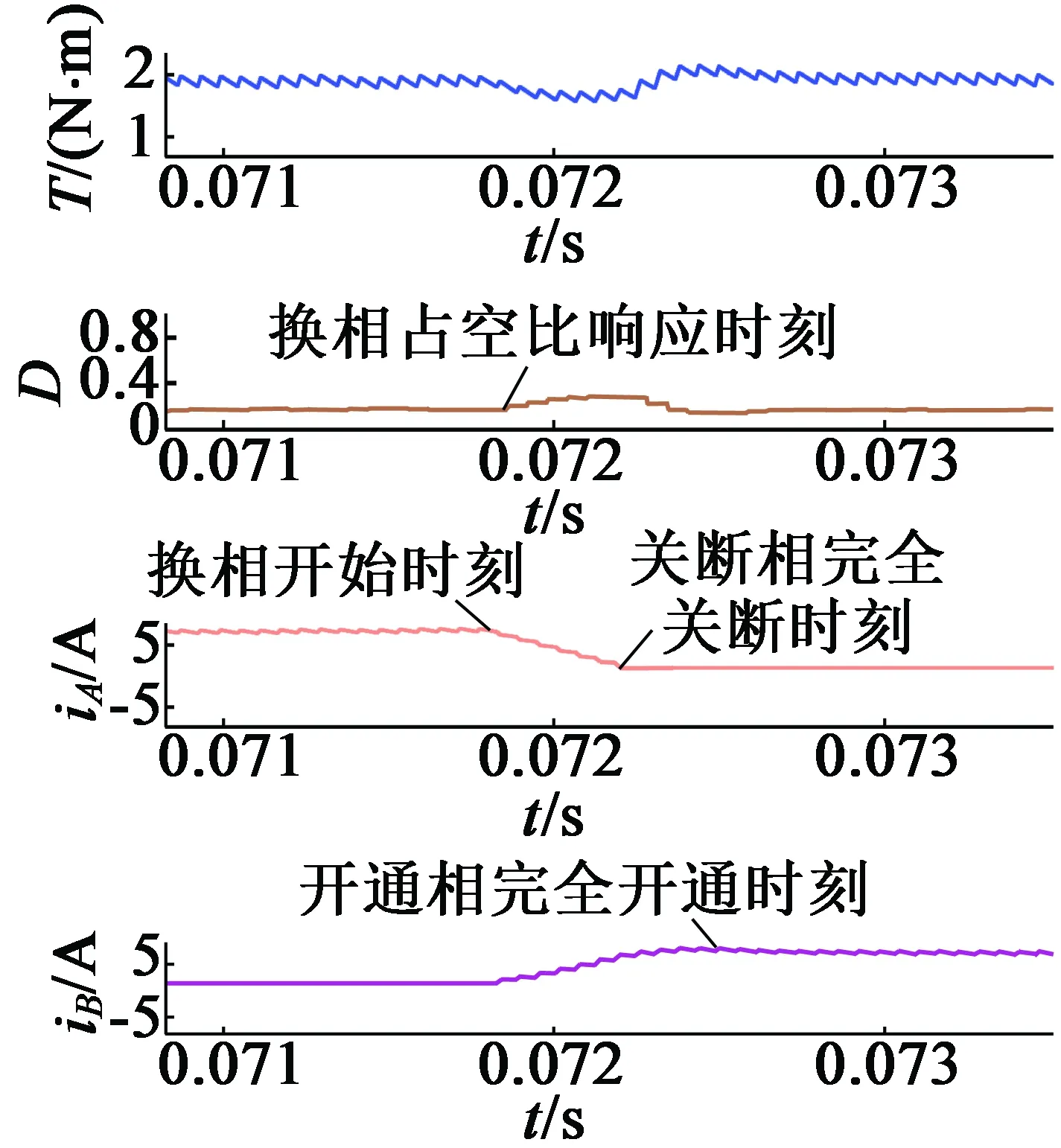
(c) 传统控制方法转矩、占空比、电流放大波形

(a) 电流预测控制方法转矩波形

(b) 电流预测控制方法转矩、占空比、电流波形

(c) 电流预测控制方法转矩、占空比、电流放大波形
额定负载1.88N·m,高速800r/min时,对比图9(a)和图10(a)转矩波形可知,电流预测控制方法下,换相转矩基本无脉动;对比图9(b)和图10(b),换相期间,传统控制方法没有引入关断相进行占空比控制,即使开通相保持恒通(占空比为“1”)也难以使开通相电流上升速率跟随关断相电流下降速率,最终导致转矩坠落;而电流预测控制方法引入关断相占空比控制,有效抑制了转矩坠落;对比图9(c)和图10(c)转矩、占空比、电流放大波形可知,传统控制方法下,开通相换相占空比开始响应时刻比换相开始时刻延迟了1个控制周期,如图9(c)所示,这种控制上的滞后性和电压幅值限制共同导致了开通相完全开通时刻比关断相完全关断时刻延长了4个控制周期,如图9(c)所示,最终导致较大的转矩坠落;而电流预测控制方法下,开通相完全开通时刻和关断相完全关断时刻相同,如图10(c)所示,换相转矩保持稳定。
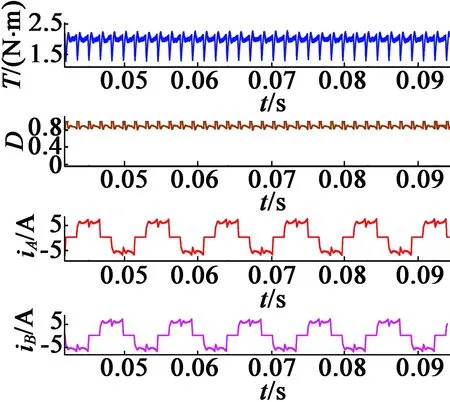
(b) 传统控制方法转矩、占空比、电流波形
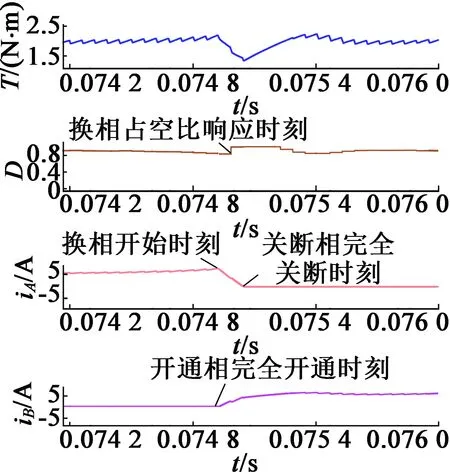
(c) 传统控制方法转矩、占空比、电流放大波形
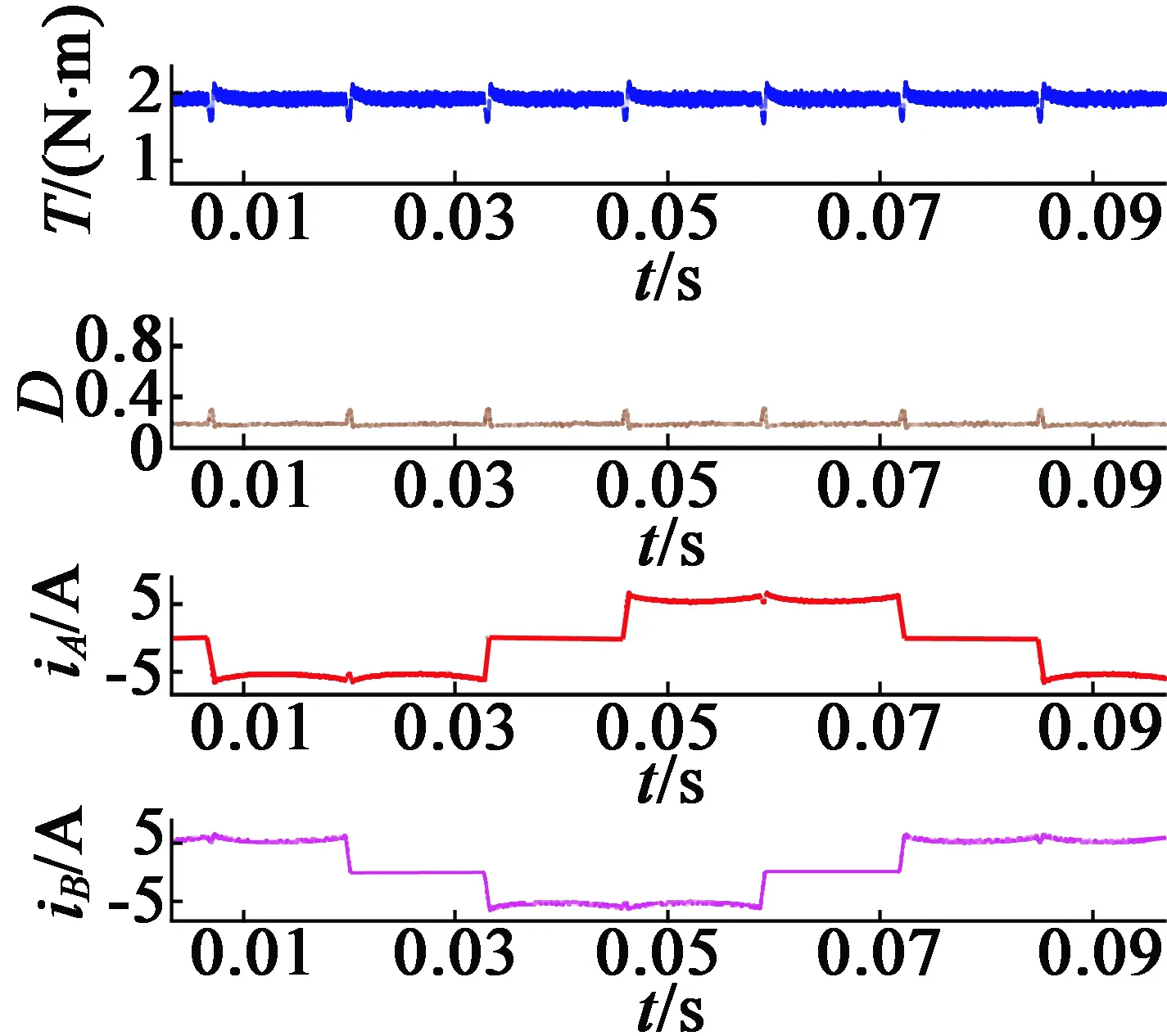
(a) 电流预测控制方法转矩波形
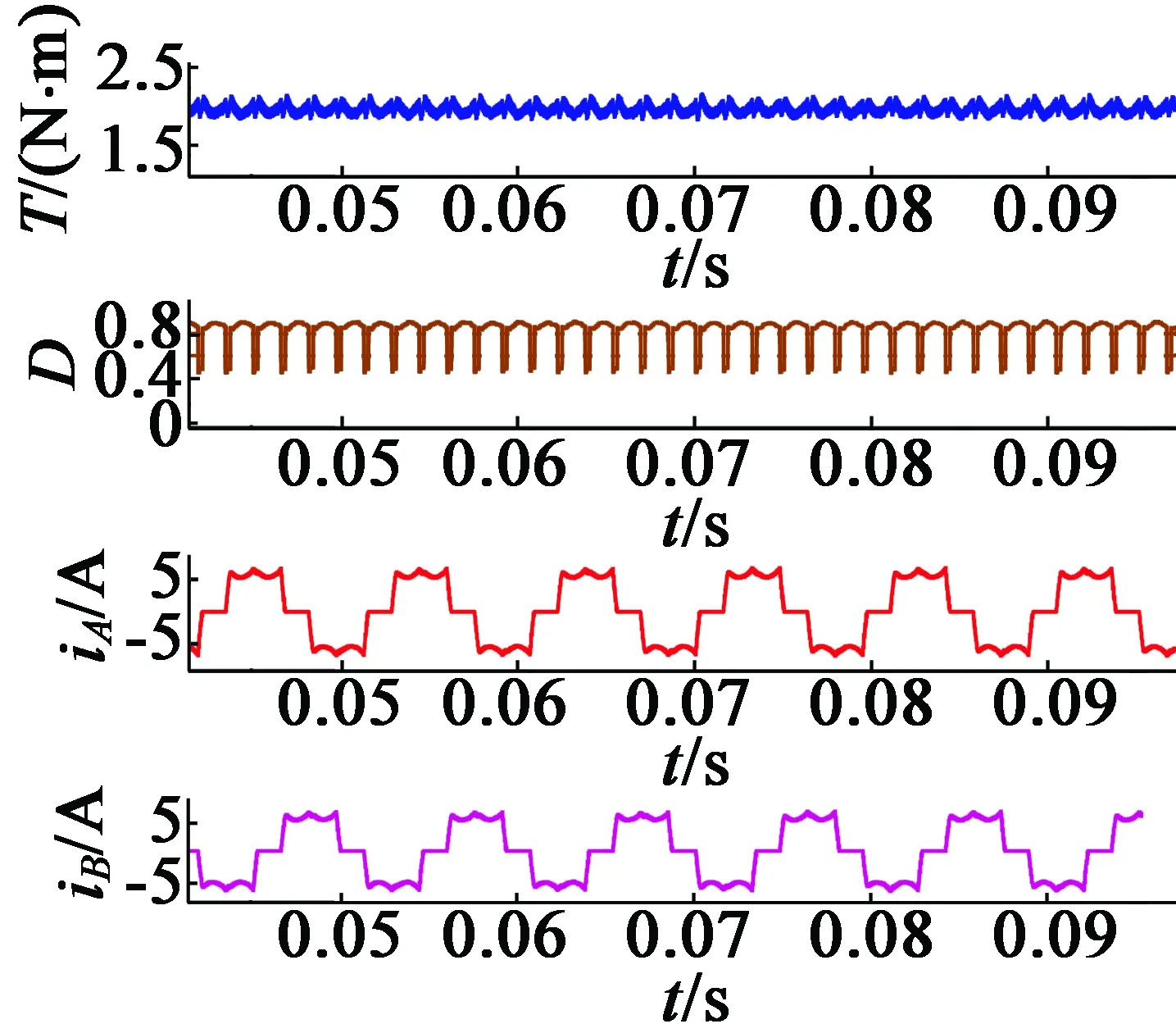
(b) 电流预测控制方法转矩、占空比、电流波形

(c) 电流预测控制方法转矩、占空比、电流放大波形
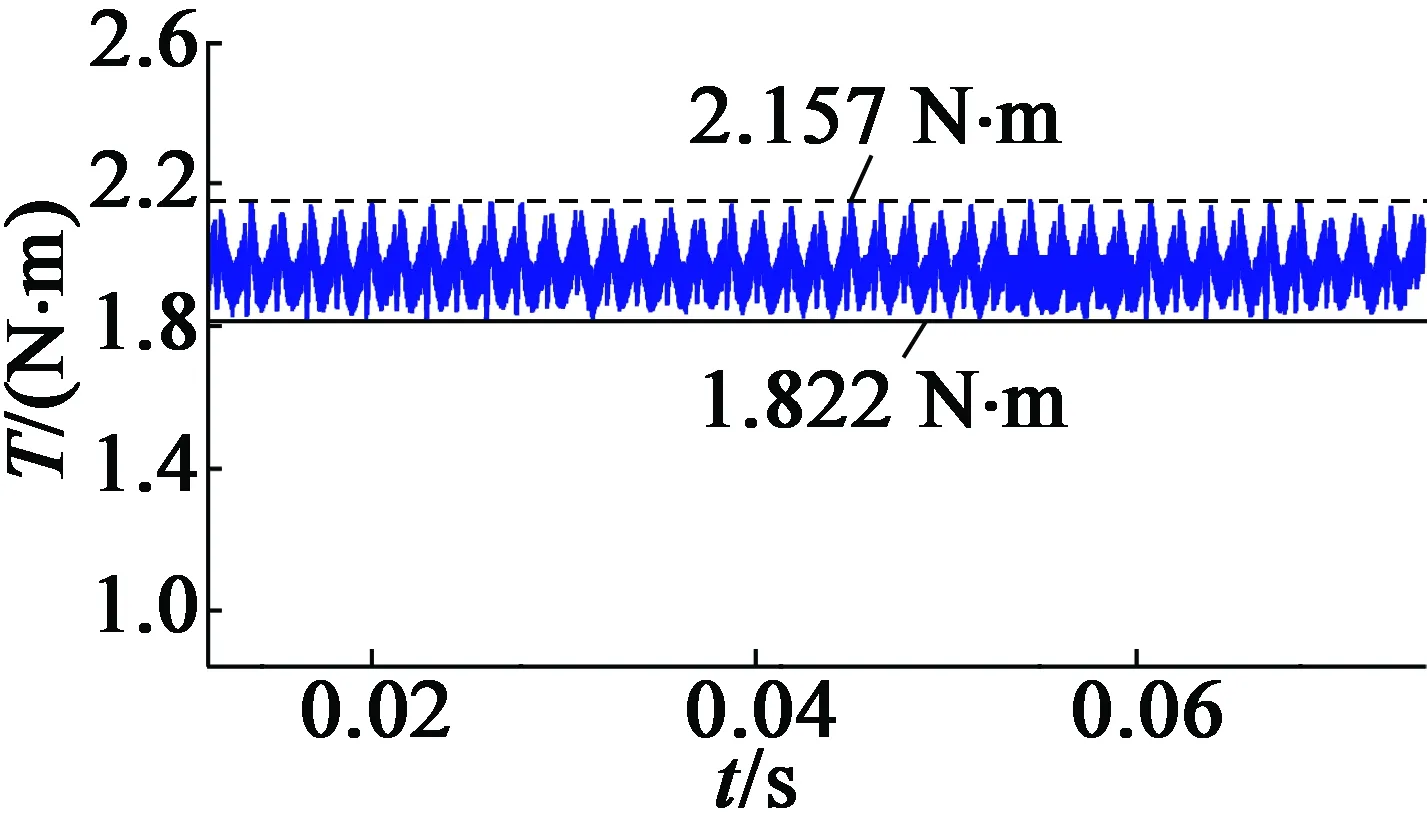
由表3分析可见,对比传统控制方法,电流预测控制方法在低速(100r/min)、高速(800r/min)的转矩脉动抑制率分别达到了18.46%和37.36%,转矩脉动抑制效果明显。
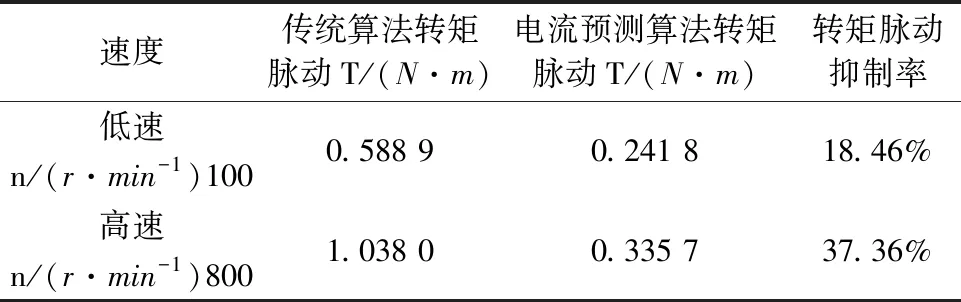
表3 转矩仿真结果对比
4 结 语
本文研究了一种基于电流预测控制的BLDCMDTC系统换相转矩脉动抑制方法。与传统方法相比,电流预测方法利用BLDCMDCT转矩控制环输出,经过转矩电流关系转换得到电流预测值。电流预测过程不依赖于电感等难以测量的电机本体参数,没有经过相关约去换算,因此电流预测算法计算简单、预测值精确,并且具有普遍适用性。仿真结果表明,电流预测控制算法能够有效抑制低速段和高速段的换相转矩脉动,与理论分析一致。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
家教世界(2023年25期)2023-10-09 02:11:56
中国特种设备安全(2022年3期)2022-07-08 02:21:56
南北桥(2022年2期)2022-05-31 04:28:07
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
阅读(低年级)(2018年5期)2018-05-14 15:47:44
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
西南交通大学学报(2016年4期)2016-06-15 20:29:36
计算机技术与发展(2016年10期)2016-02-27 00:44:08
