具有近似仿射尺度不变特征的快速图像匹配
2020-11-24 02:12:00高思莉李范鸣蔡能斌
光学精密工程 2020年10期
岳 娟,高思莉*,李范鸣,蔡能斌
(1. 中国科学院 上海技术物理研究所 智能红外感知重点实验室,上海 200083;2.上海市现场物证重点试验室,上海 200083)
1 引 言
近些年,随着摄影技术的发展与普及,基于多视角图像匹配的三维数字城市建模、城市规划与安全管理[1-2]以及各应用背景下的场景重构[3]、场景识别[4]正日益发展起来,这对传统图像匹配技术提出了挑战,迫切需要发展大仿射形变图像匹配技术。
目前,大仿射形变图像匹配方法主要可分为三类[5-6]:(1)采用局部特征稳定区域(Maximally Stable Extremal Regions, MSER),Harris-Affine,Hessian-Affine等算法提取原图中具有仿射不变性的区域,进行特征描述与匹配,这类方法不具备完全仿射不变性,对仿射形变大的场景匹配效果不够好[7-8];(2)首先采用SIFT,MSER等算法对原图进行粗匹配,计算出描述原图间几何形变关系的变换矩阵H;然后基于变换矩阵H,对原图间的几何形变进行纠正,得到一张原始图像的纠正图像;最后对该纠正图像和另一张原始参考图像再次进行SIFT匹配[9],这类方法匹配效果很大程度上取决于粗匹配结果,但如本文3.1节home场景SIFT匹配结果所示,对于这类大仿射形变场景,往往由于粗匹配点数量过少,不能或不足以准确计算H矩阵,则难以保证最终匹配效果;(3)ASIFT法。ASIFT算法首先采用近似穷举法的思想模拟相机光轴定向参数,对原图进行正仿射变换,分别模拟出两张原图的斜视仿射图像序列空间;然后在斜视仿射图像序列空间中,进行特征提取与SIFT匹配[8]。该方法以时间换空间,模拟出仿射图像序列进行匹配,来提升算法对图像仿射形变的鲁棒性,具有完全仿射不变性。
但是,ASIFT穷举法的思想带来大量的运算量,且对原始图像进行正仿射变换的物理意义不够明显。另外,在一般的应用场景下,ASIFT对大角度纬度上进行更多的经度角采样的现实意义并不大:如倾斜度t=8时,从2.1节仿射成像模型可知,此时纬度θ=cos-1(1/t)=82.82°,相机光轴与物方平面夹角很小,现实应用中一般很少出现这种情况,然而ASIFT算法却依然在该纬度上进行20次经度采样、仿射变换,造成较大的计算资源浪费。学者们在ASIFT算法的基础上,基于倾斜相机各镜头光轴的相对位置关系这一先验知识,进行不同视角影像间的几何畸变纠正[1,10],以减少仿射变换模拟次数,但仅限于基于倾斜相机的影像匹配这一特殊应用场景。
基于此,本文从逆仿射变换出发,提出一种具有近似仿射尺度不变特征的快速图像匹配算法Fast-AASIFT,进行仿射变形纠正,估计出原图(相机像平面v)对应的正射纠正图像(物方平面u),然后在正射图像上进行特征点提取、SIFT描述,最后进行SIFT优化匹配。与ASIFT算法相比,该算法具有更清晰的物理意义,且可基于图像信息大幅减少仿射变化次数,能在保证算法抗仿射形变鲁棒性的同时,又有效提高算法效率,具有应用价值,尤其对基于手机等电子设备拍照的场景重构、场景识别等具有重要意义。
2 Fast-AASIFT算法
2.1 图像逆仿射纠正

(1)
v=Au.
(2)
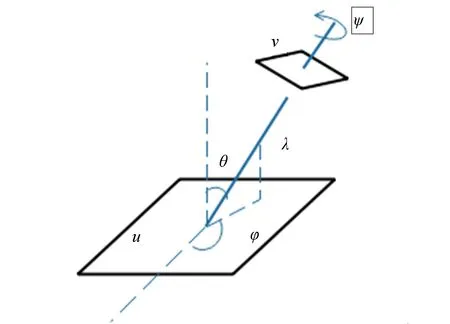
图1 仿射成像模型Fig.1 Affine imaging model
鉴于SIFT算法具有尺度和旋转不变性,可取λ=1,ψ=0,则仿射矩阵A可以简化为:
(3)
其逆变换矩阵A-1如下:
(4)
基于式(4),通过如下2个步骤实现仿射变形纠正,估计出原图对应的正射图像。
2.1.1 尺度变换/倾斜变换
(5)
基于式(5)进行尺度变换,变换过程如图2所示,其中xoy表示像平面坐标系,xIoIyI表示图像坐标系,两者坐标轴单位均为像素(pixel)。记原图I0宽为Wo、高为H0,尺度变换图It宽为Wt、高为Ht,则:
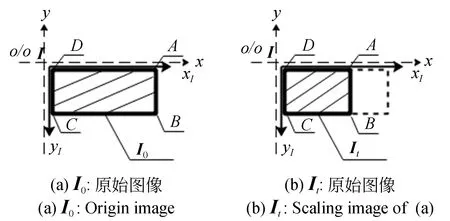
图2 尺度变换Fig.2 Scale transformation
(6)
2.1.2 旋转变换
逆仿射纠正的旋转变换分为以下两步:像平面坐标系下图像逆旋转变换与基于图像坐标系的图像变换。
(1)像平面坐标系下图像逆旋转
如图3(a)所示,基于变换矩阵A-1,尺度图像It绕像平面坐标系xoy的原点,顺时针旋转角度φ,实现逆转换。旋转后图像对应像平面坐标系下的纹理区域Ir。

图3 旋转变换Fig.3 Rotation transformation
记图像的4个角点分别为A,B,C,D,则像平面坐标系上,旋转前It的4个角点坐标分别为:A(xt1,yt1)=(Wt,0),B(xt2,yt2)=(Wt,-Ht),C(xt3,yt3)=(0,-Ht),D(xt4,yt4)=(0,0).
旋转后Ir的4个角点的坐标计算如下:
(7)
即:
(8)
(2)图像坐标系下图像变换
像平面坐标系下的纹理区域Ir最终转换至图像坐标系下,输出图像Ir_out。如图3(b)所示,图像坐标系xIoIyI以左上角为坐标原点,水平向右为x轴正,垂直向下为y轴正,故Ir须经R翻转、T平移才变换至最终纠正图像:
Ir_out=R×Ir+T,
(9)


图4 逆旋转示意图Fig.4 Reverse rotation diagram
(10)
记原图I0上像素点P(x,y),对应纠正图像Ir_out上像素点P′(x′,y′),P在像平面坐标系下的坐标为(x,-y),综上有:

(11)
根据式(11)可推导出:
(12)
综合式(10)~式(12),本文基于相机仿射形变参数(φ,t)对原图进行逆仿射变换,即可估算其正射图像。在缺少相机先验参数的前提下,虽无法准确获取图像拍摄时的仿射形变参数,但可以结合图1所示仿射成像模型与图像本身信息估计参数(φ,t)取值范围,通过多次模拟变换实现仿射形变纠正。常规拍摄时,相机光轴与物方平面法向量一般会存在一定夹角,即相机纬度,但该纬度不会太大,故可取倾斜度t=[1.1,1.4,1.7,2],对应相机纬度分别为θ=cos-1(1/t)=[24.6°,44.4°,53.9°,60°];常规拍摄时,各拍摄位置不会相差太远,结合图1,在各纬度上可取φ=[-20°,-10°,0°,10°],对相机拍摄位置经纬度参数进行采样模拟,即可实现较好的仿射纠正。
如图5所示为同一手机在不同位置对同一场景(Building)拍摄的两幅原始图像,如前文所述,场景原图不包含相机及拍摄位置等先验参数,但从图像本身可知,两幅场景原图存在较大的仿射形变,但两个拍摄位置相差不远,可以参考前文设置θ与φ,对两幅原图分别进行仿射纠正,得到如图6、图7所示的纠正图像序列。可见在不同的纠正图像中,不同位置处的倾斜的建筑物相继得以纠正:通过不同倾斜度模拟,还原出不同尺度上的场景;通过10°经度模拟,场景中右侧建筑物旋转仿射形变得到较好纠正;通过-10°与-20°的经度模拟,场景中左侧建筑物旋转仿射形变得到较好纠正。

图5 场景原图Fig.5 Origin images
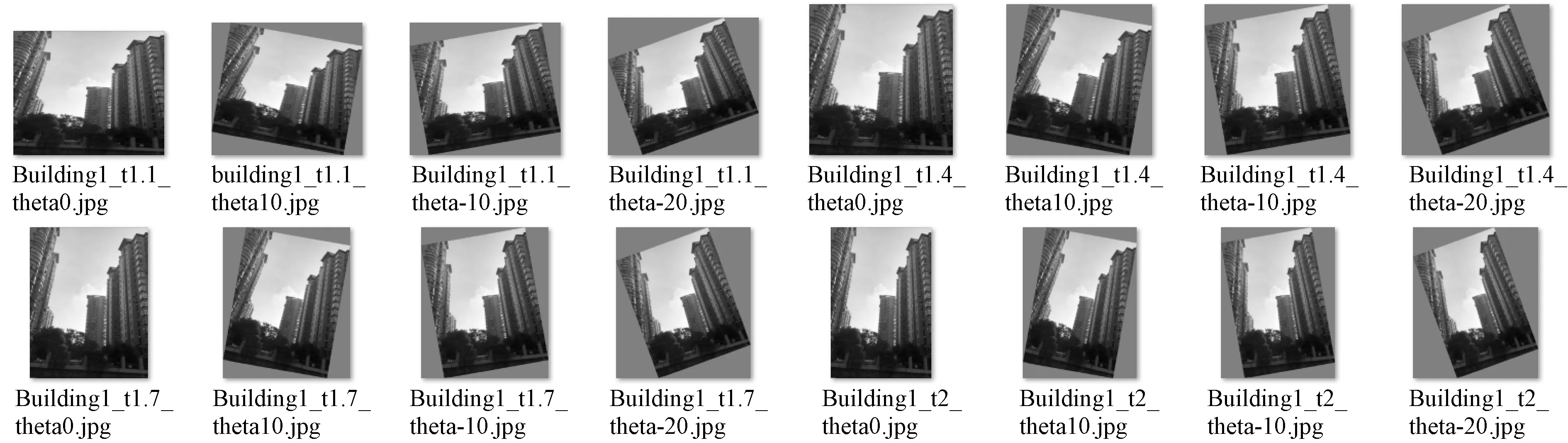
图6 Building1的纠正图像序列Fig.6 Block diagram of image measuring system
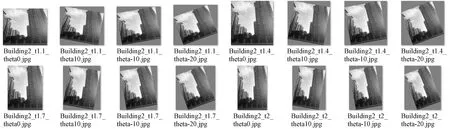
图7 Building2的纠正图像序列Fig.7 Block diagram of image measuring system
综上,本文通过16次模拟变换估计出16幅正射图像,用估计出来的正射图像序列模拟出原始图像正射图像的所有特征,实现对原图的仿射形变纠正。
2.2 纠正图像特征提取与匹配
本文按照如下步骤在纠正图像序列上进行SIFT特征提取与匹配[11-16],该内容相对成熟,不作详细阐述。
(1)在纠正图像上,提取高斯差分(Difference of Gaussian, DoG)特征点并建立SIFT描述子[15];
(2)进行SIFT特征匹配;
(3)进行基于单应约束及随机抽取一致性约束 (Random Sample Consensus, RANSAC)[16]的匹配优化,参照式(12)将特征点位置反算至原图进行匹配结果输出。本文在对比核线约束+RANSAC优化与单应约束+RANSAC优化两种匹配优化效果的基础上,最终选用后者进行匹配优化,下文将两种优化方法分别简称为核线优化法、单应优化法,并分别用字母F,H进行简易标识。
3 实验与分析
系统环境为Windows10,i5 CPU,8 GB RAM。
3.1 SIFT匹配优化及其局限性分析
3.1.1 SIFT匹配优化
本文在牛津大学计算机视觉实验室图像数据[17]的基础上开展匹配优化研究,并展示其中经典彩色Graf场景与灰色Boat场景的匹配效果图与匹配误差如图8~图9所示。从匹配效果图可见,该场景下两种方法都能匹配一定数量正确同名点。从误差图直观可见,两种方法匹配点数相当,但H法无误匹配点,且匹配精度更高:Graf场景下,F与H法匹配点数分别为31和25,boat场景下,F与H法匹配点数均为21个; 若将匹配误差>5 pixel的匹配点定义为误匹配点,则实验场景下,F法优化后仍存在2~3个误匹配点,而H法优化后无误匹配点;且从局部匹配误差图可见,在其他正确匹配位置上,H法匹配精度整体上优于F法匹配精度。

图8 graf优化匹配结果
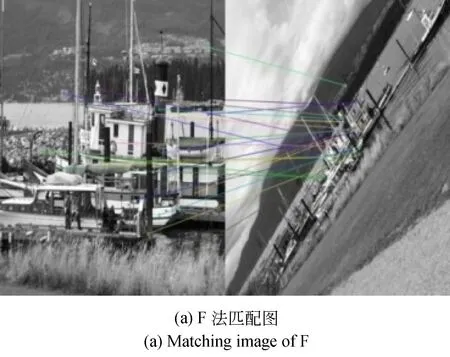
图9 Boat优化匹配结果
如式(12),本文定义优化度C进一步对比两种优化算法效果:
(13)
其中:U1,U2为优化前、后误匹配率,由优化前、后匹配点数N1,N2,以及优化后误匹配点数N3计算而来:
(14)
统计上述实验的优化度如表1所示,可见SIFT匹配算法下, H法优化度>F法优化度。因此,本文在图像匹配阶段采用H法对进行匹配优化。
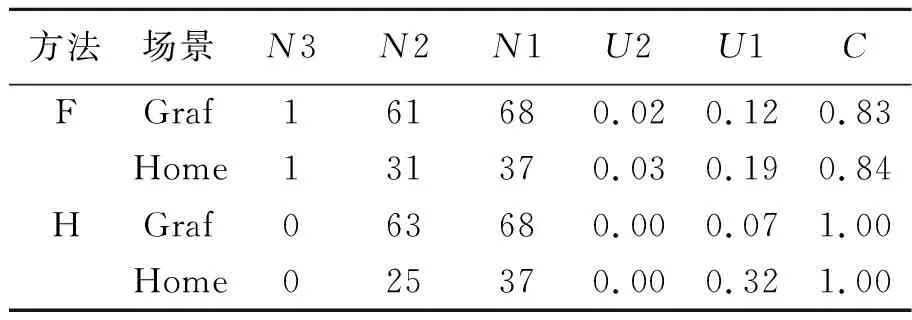
表1 匹配优化结果对比
3.1.2 SIFT匹配算法局限性分析
采用SIFT匹配+单应优化算法对如下仿射形变较大的场景图像进行匹配,其中图10(a)为Building图像匹配优化后结果,优化前后匹配点数分别为11和8;图10(b)为Home图像匹配优化前结果,匹配点数为0。

图10 SIFT匹配结果
可见,在这种仿射变换较大的场景下,SIFT匹配算法正确匹配点数极速下降,尤其当场景特征较少时,正确匹配点数甚至会减少为0,因此,SIFT匹配及其优化算法对大仿射形变场景存在应用局限性,而ASIFT算法以及本文提出的Fast-AASIFT算法正是对其应用局限性进行弥补的算法。
3.2 Fast-AASIF匹配算法实验
在3.1.2节基础上,本节对传统ASIFT算法与本文Fast-AASIFT算法的抗仿射形变性进行对比验证实验。
3.2.1 匹配效果分析
如2.1.2节所述,针对这类常规拍摄场景,本文Fast-AASIFT算法的参数设置为t=[1.1,1.4,7.2],φ=[-20°,-10°,0°,10°]。如图11和图12所示,分别为两个场景匹配优化的效果图和匹配误差,综合两个场景下SIFT,ASIFT与Fast-AASIFT的匹配结果如表2所示。可见,大仿射形变场景下,相比于单纯的SIFT算法,ASIFT与Fast-AASIFT两种算法匹配点数增加,且匹配误差低:对于Building场景,单纯的SIFT优化匹配算法只能成功匹配到8对优质特征点,然而ASIFT与Fast-AASIFT两种算法能成功匹配到不低于16对的优质特征点;尤其对特征较少的Home场景, SIFT匹配算法已无法正确匹配到特征点对,但ASIFT与Fast-AASIFT算法依然能优质匹配到10对以上特征点。另外,综合两种大仿射形变场景的匹配效果图和匹配误差可见,Fast-AASIFT算法具有与ASIFT算法相当的仿射匹配能力,其峰值匹配误差<2.5 pixel,平均匹配误差<1.2 pixel。

表2 算法匹配误差对比

图11 Building匹配结果Fig.11 Matching results of Building
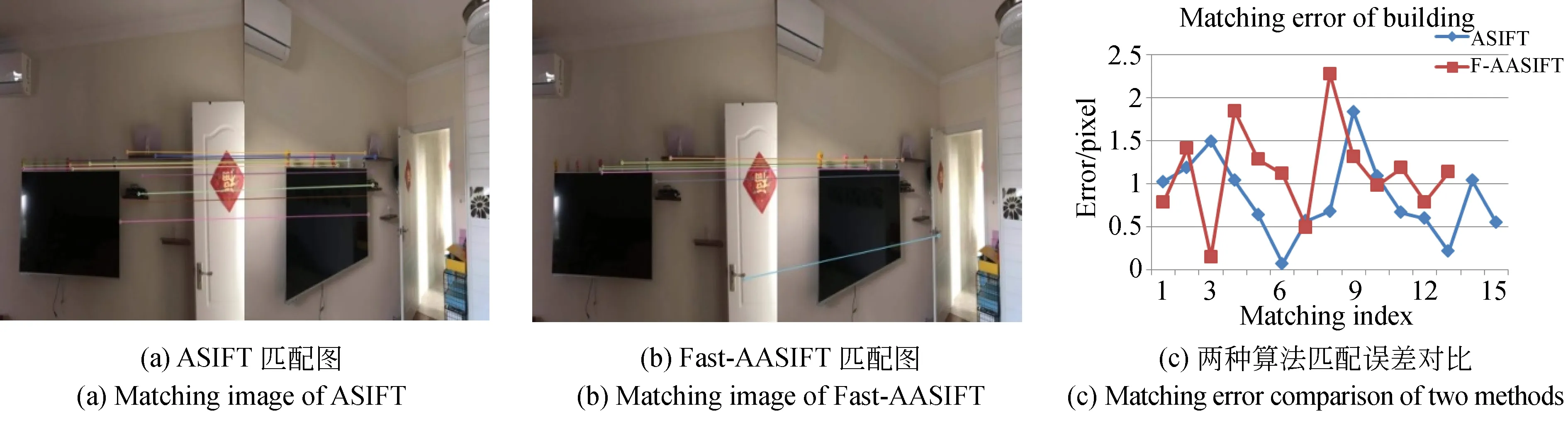
图12 Home匹配结果Fig.12 Matching results of Home
综上,由于算法对场景图仿射形变进行了有效的模拟补偿,对于实验中仿射形变较大的场景,Fast-AASIFT算法可突破SIFT算法的局限性,实现与ASIFT算法相当的匹配效果,正确匹配到足够数量的匹配点,以服务于后续基于图像匹配的场景重构、识别等应用。
3.2.2 匹配效率分析
匹配算法效率主要体现在特征提取与特征匹配两个阶段上。特征提取、特征匹配的计算量与图像面积、图像面积平方近似成正比[8]。

表3 算法耗时对比
4 结 论
针对SIFT等传统匹配算法抗仿射形变能力有限的问题,ASIFT算法以时间换空间,模拟出仿射图像序列进行匹配,来提升算法对图像仿射形变的鲁棒性,但运算量大,且物理意义不够明显。基于此,本文提出了具有近似仿射尺度不变特征的快速图像匹配算法Fast-AASIFT。实验结果证明:大仿射形变场景下,该算法能匹配足够多特征点,且峰值匹配误差<2.5 pixel,平均匹配误差<1.2 pixel,其抗仿射形变能力明显优于SIFT算法,与ASIFT算法相当;该算法耗时<0.3倍ASIFT,大幅改善了ASIFT算法的耗时问题,可见,本文算法既有效保证了算法抗仿射形变鲁棒性,又大幅提高了算法效率,在场景重构、场景识别等领域中具有应用前景。
猜你喜欢
孩子(2019年5期)2019-05-20 02:52:44
数学小灵通·3-4年级(2017年12期)2018-01-23 03:37:57
数位时尚(幼儿教育)(2017年12期)2018-01-05 01:23:30
计算机测量与控制(2017年6期)2017-07-01 16:23:31
小学生导刊(低年级)(2016年11期)2016-11-14 21:03:50
读写算·高年级(2016年3期)2016-05-30 01:53:46
火控雷达技术(2016年1期)2016-02-06 02:18:05
集美大学学报(自然科学版)(2015年1期)2015-02-28 01:13:32
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10 02:34:46
航天器工程(2014年4期)2014-03-11 16:35:37