基于图像特征的潘得路扣件区域标签的定位
2020-11-11 08:01冯婷立郑树彬李立明
智能计算机与应用 2020年6期
冯婷立, 郑树彬, 李立明
(上海工程技术大学 城市轨道交通学院, 上海201620)
0 引 言
钢轨固定是保障列车安全运行的重要手段,其中扣件检测是钢轨固定的关键问题之一。 目前大部分仍然常使用传统方法——人工检测,此方法效率低、不安全,虽然已经利用轨道检修车上线检测,但误检率仍然较高,存在一定的安全隐患。 近年来,国内外专家学者对扣件检测问题进行了积极的探索,尤其对轨道扣件检测算法进行了深入的研究。 其中有大量学者转向人工智能算法,此算法需要大量的训练数据,这些数据大部分需要人工进行标注。 人工标注,效率低,花费大量的时间在对目标的标注上,因此,一个能够自动标注的图像中扣件区域的标签方法显得尤为重要,能提高效率,减少人工,将更多的时间集中到优化人工智能算法中。
对扣件图像的扣件定位方法,刘馨[1]运用投影法和特定区域像素点扫描统计相结合的方法定位扣件区域,并使用灰度特征和HOG 特征描述特征向量,具有一定的有效性和可行性,对扣件背景要求较高,需灰度对比较强。 刘甲甲[2]利用枕肩、扣件和背景间的空间位置关系去除冗余繁杂的背景信息,通过提取PHOG 特征和MSLBP 特征加权融合,提取扣件宏观纹理特征,对扣件进行定位,有一定鲁棒性,在扣件背景复杂的情况下,特征点有待加强。 赵姗姗[3]对高速采集的图像进行扣件识别,利用SIFT提取扣件图片的局部特征,进而归一化为Fisher 向量,从而实现扣件定位,扣件复杂背景对其定位有影响。
以上学者们提出的算法在扣件检测中扣件区域定位方面,在实际应用中受扣件周围区域的繁杂背景信息影响比较大,基于图像特征的提取,Khan R.A.[4]在Harris-Shi-Tomasi 角点检测的基础上使用模板匹配的方法来识别扣件,检测速度上有待提高。李永波[5]采用两种相结合的方法,即梯度方向直方图和主成分分析方法,来进行提取扣件特征,以实现扣件识别。 范宏[6]改进的LBP 算法实现自适应噪声抑制,以更好地提取扣件的显著特征,利用模板匹配算法进行精确扣件区域定位,LBP 特征较为显著,有较好的鲁棒性和环境适应性,匹配速度上有待提高。
本文研究基于图像特征的潘得路快速弹条扣件自动标签定位,通过选定含有外触发模式同步控制的线阵相机,来确保此线阵相机在轨道检测车变速运行情况下仍能够采集到不产生纵向畸变的图像;对采集的图像进行预处理通过对数变换实现图像归一化,使得图像更加清晰,进而突出扣件目标区域,提出一种改进的OTSU 方法进行扣件背景分割;对扣件的固定螺栓的形状特征匹配,获取固定螺栓的中心坐标参数,利用扣件的先验空间位置信息从而获得扣件区域标签的定位。
1 图像采集的相机选择
工业相机按照传感器的结构特性可分为面阵相机和线阵相机。 线阵相机的像元是一维线状排列的,只有当相机与被拍摄物体在纵向相对运动时才能得到二维图像,适用于运动速度较快,分辨率有一定的情况。 面阵相机,可应用于多种测量如温度等,其优点是可直接获取二维图像,因而测量结果直观。但是像元总数多,线阵少,使得帧幅率受到一定的限制。 线阵相机特点是像元数一维,总像元数较少,且像元尺寸可以灵活多变,帧幅数比较高。 经过比较选择线阵相机更适合轨道扣件检测采集图像。
在实际采集图像时,一般情况,只有轨道检测车在钢轨上匀速行驶时,线阵相机采集的图像能够保证图像不产生纵向畸变(纵行的拉伸或压缩),使其比例基本与实际扣件大小一致。 因而,在采集图像时应尽量保持轨道检测车匀速行驶。
2 图像预处理
2.1 图像均值化
对线阵相机参数进行设定,采集到一系列的灰度扣件图像,其图像分辨率4096×2048,与实际中的扣件图像比例一致,为了减少噪声干扰,对原始扣件图像进行归一化处理,采用对灰度对数变换,对原图进行处理。 对数变换,就是将源图像中范围较窄的低灰度值映射到范围较宽的灰度区间,与此同时将范围较宽的高灰度值区间映射为较窄的灰度区间,实现了暗像素值的扩展,高灰度值的压缩,从而实现图像归一化能。
2.2 扣件前景与背景分割原理
前景与背景分离是对扣件识别的基础。 本文采用一种改进的OTSU 算法,以实现扣件与背景分离。
OTSU 算法是一种自适应的阈值确定方法。 算法思想是假设图像像素能够根据阈值基于图像的灰度特性,被分成前景目标和背景两部分。 然后计算的该最佳阈值,以该值来区分这两类像素,使得两类像素区分度最大。

图1 灰度变换前后对比Fig. 1 Comparison before and after gray level transformation
对于OTSU 算法的具体描述:将T 记为对图像的前景(即目标)和背景的分割阈值,将ω0记为前景目标的像素点占全图的占比,其μ0为平均灰度;将ω1记为背景像素点数占全图的占比,其平均灰度为μ1;全图的平均灰度记为μ,类间方差记为q。
假设图像大小为M × N,图像中如果将像素的灰度值低于阈值T 的像素个数记为N0,如果将像素灰度高于阈值T 的像素个数记为N1,则可得背景像素占比为
0~M 灰度区间的灰度累计值为

此方法优点是计算简单快速,不受图像亮度和对比度的影响,但结果图易产生大量噪点。 因此,本文提出一种改进的OTSU 算法,首先进行全局OTSU,得到的结果图中出现部分噪声,此时对结果图进行局部二值化,具体如下: 用一个大小为m ×n(10 列宽× 图像原始高度) 的水平滑窗,从图像的右往左逐像素滑动。 对于其滑窗内的像素计算方法是采用方差来估量。 若滑窗内的方差高于阈值,不作处理;若滑窗内的方差低于阈值,则是此滑窗的区域的像素设为1(白色)。 结果如图2、3 所示。

图2 OTSU 结果图Fig. 2 Otsu results

图3 局部二值化后结果图Fig. 3 Results after local binarization
3 扣件区域定位
3.1 算法总述
模板匹配是一种比较原始的模式识别方法。 模板匹配技术是指将一部分的图像作为一个模板,在待比较的图像中找到与之相同的模板位置,就是将模板图像与原始图像进行匹配比较,在原始图像中匹配与既定模板相同或相近的区块。
由于扣件的形状复杂,对整个扣件目标做匹配不仅计算量大,而且容易受到扣件在图像中的位置变化的影响。 可发现,预处理后的扣件图像结果图中螺栓、弹条轮廓清晰。 同时在扣件图像中,螺栓的位置较为固定,此潘得路扣件的螺栓形状特征明显,外圈是一个近似圆形,内圈是个近似菱形,是此类扣件的显著特征。
本文提出基于螺栓独特的形状特征的模板匹配。 针对采集的图像中扣件区域在图像中部位置,由结果图和先验知识可知,螺栓的位置在整个扣件图像的左下和右上区域,因此,在进行模板匹配的过程时,主要针对扣件图像的左下和右上区域进行匹配,不但减少了计算量而且提高了模板匹配的精度。本文提出采用Hu 轮廓不变矩进行模板匹配,利用归一化进行相似度测量,利用贪心算法降低运算量,在扣件图中找到螺栓位置,获取固定螺栓的中心坐标参数,利用扣件与螺栓的先验空间位置信息从而获得扣件区域标签的定位。
3.2 Hu 轮廓不变矩原理
在图像处理中,常用的描述图像信息的统计特征是不同阶次的矩,特点是具有一定的平移、旋转和尺度不变性。 由于高阶矩对图像噪声、变形非常敏感,常用的三阶Hu 不变矩具有较好的适应能力。Hu 矩可以用于模板匹配中,用去统计图像的灰度或者是区域原始特征,也可以应用于现状特征的描述,构造轮廓Hu 描述子矩[8]的原始定义为

其中,p 与q 是所有的非负数整数值;参数p +q称为矩的阶次。 对于图像的轮廓特征而言,其描述的是特定次序的统计特性,处理对象是处理后的二值轮廓而言的。 设在一个二维离散图像(M ×N) 的形状特征上的一点f(i, j) 的p + q 阶矩定义为
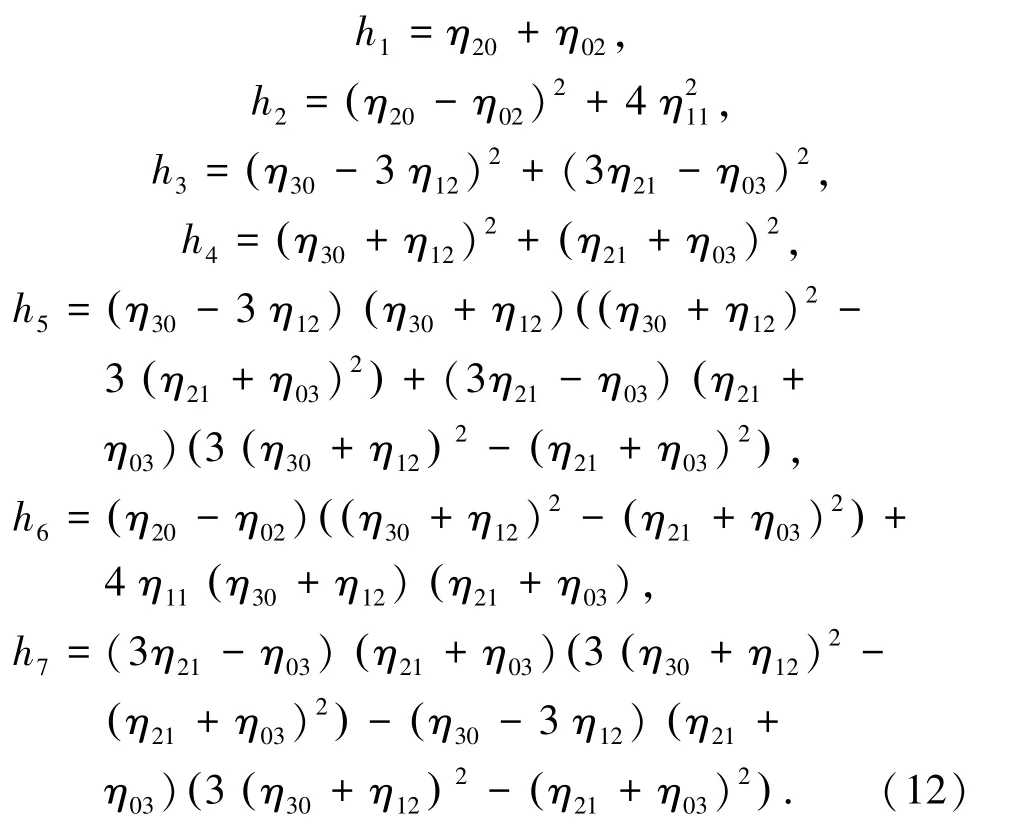
利用二阶和三阶归一化中心矩构造了7 个不变矩h1~h7:
3.3 相似度测量
度量的方法分为两种,一种是求差法,另一种是归一法。 本文采用归一化,当不变矩的产生微小变化时,不对相似度产生巨大的偏差,由此,比较适合用于相似度测量。 相似性度量公式为
Mi(i =1 ~7)表示模板图像的7 个轮廓不变矩和Ni(i =1 ~7)表示螺栓模板图像中动态的7 个轮廓不变矩,Rvalue表示匹配值,Rvalue∈(0,1) 越接近1,表示相似度越高。
3.4 贪心算法
采集的扣件图像,扣件位置在图中位置不一,不能只对图像的左下和右上区域进行匹配。 因此,提出贪心算法来减少匹配的时间。
贪心算法就是做出一系列选择使得原问题达到最优解。 在每一个决策点,都是做出当前看来的最优选择。 在本文中,如果将模板特征点与图像中的物体特征点的点积全部计算,会花费大量的时间,然而,其点积可以不全部计算,事实是当前匹配的数高于最小的匹配数mmin时,才能够获取一个可能的匹配实例。 用mj来表示前j 个点的点积的计算之和:
若式(16)成立,则在计算完mj后便终止计算。在实际应用中,如果让所有的部分和mj满足此条件mj<mmin,匹配的速度将很快,但不能保证找到图像中正确的目标,因此,将前一部分的模板点的匹配以一个相对可靠的停止标准来打断,剩下部分的点的匹配实现最小匹配分数mmin。 设定一个参数p 来判断哪部分的模板点,需执行提前停止计算策略。 若p =1,则所有的模板点执行绝对的提前停止计算策略;反之,若p = 0,则所有的模板点执行相对的提前停止计算策略标准。 由此,式(17) 成立时,点积的部分和就会提前终止匹配。 p 的值得设定是个关键,在0 ~1之间取值,因此,p 的值越大,更多的点执行绝对的提前停止计算策略,p 的值可以设置为0.8,增加模板点执行相对的提前停止计算策略标准。

3.5 实验结果
根据上述提出采用Hu 轮廓不变矩进行模板匹配,和利用贪心算法降低匹配运算量,在扣件图中找到螺栓位置,获取固定螺栓的中心坐标参数设为

利用扣件与螺栓的先验空间位置信息,左右两个扣件各自以其的螺栓中心坐标为参考点,从而获得扣件区域标签的定位,结果如下。
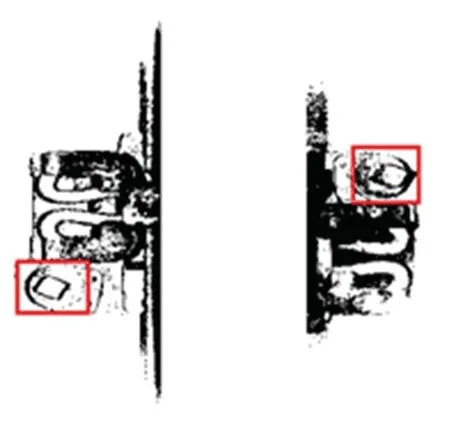
图4 螺栓匹配结Fig. 4 Bolt matching results
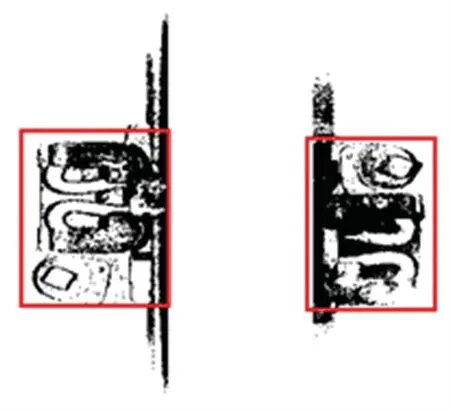
图5 扣件区域标签Fig. 5 Fastener area label
4 结束语
本文研究基于图像特征的潘得路快速弹条扣件区域标签的定位,通过选定和设定线阵相机,使其采集到不产生纵向畸变的图像;对采集的图像进行预处理通过对数变换实现图像归一化,提出一种改进的OTSU 方法进行扣件背景分割,有一定的鲁棒性;本文能够对扣件的固定螺栓的形状特征匹配,采用了Hu 轮廓不变矩匹配螺栓形状特征,利用贪心算法降低匹配时间,加快匹配速率,获取固定螺栓的中心坐标参数,利用扣件的先验空间位置信息从而获得扣件区域标签的定位,通过实验,实现了对潘得路扣件的自动定位。
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
时代汽车(2022年13期)2022-07-05
北京航空航天大学学报(2022年6期)2022-07-02
科技创新与应用(2022年14期)2022-06-02
集装箱化(2021年1期)2021-04-12
智能计算机与应用(2020年9期)2020-03-18
中国信息技术教育(2020年2期)2020-02-02
文萃报·周五版(2019年11期)2019-09-10
诗潮(2019年1期)2019-01-25
读者·原创版(2015年7期)2015-11-29