
基于轨道图像位置距离特征的扣件状态识别
2020-03-18 01:39:14冯婷立郑树彬李立明
智能计算机与应用 2020年9期
冯婷立, 郑树彬, 李立明
(上海工程技术大学 城市轨道交通学院, 上海 201620)
0 引 言
铁路固定完好的钢轨是保障列车安全运行和高效的重要手段,扣件检测则是钢轨固定的一个重要问题。目前大部分检测常使用传统手段即人工检测,效率低、安全低,虽利用轨道检修车上线检测,但仍然有较大误差,在特定情况下,安全隐患剧增。专家学者对扣件检测问题和算法深入的探索,也有大量的学者转向机器视觉算法,此算法大多借助相机采集的图像、图像分析、能提高效率,减少人工,将更多的时间集中到优化机器视觉算法中。
Yang采用方向场算法和模板匹配相结合检测扣件状态[1],但对扣件定位精确度和采集的图像质量有较高的要求。然而现场钢轨采集的图像受到各种环境因素影响,使得图像质量差异性显著,匹配精度大幅度下降;刘甲甲的思路是去除冗余繁杂的背景信息,通过枕肩、扣件的空间位置关系,通过提取PHOG特征和MSLBP特征加权融合,提取扣件宏观纹理特征[2],但是在扣件背景复杂的情况下,特征点有待加强;李永波采用梯度方向直方图和主成分分析方法,提取扣件特征,以实现扣件识别[3],但需提高检测速率;范宏改进的LBP算法达到自适应噪声抑制,可提取扣件的显著特征,利用模板匹配算法精确扣件区域定位[4],但匹配速度有待加强。
本文探索潘得路扣件扣紧和非扣紧状态的识别,主要思想是利用轨道图像位置距离特征进行判别,利用同步控制线阵相机对钢轨及潘得路扣件进行多次图像采集;对采集到的图像进行分类和归一化处理,将十字交叉法与霍夫变换相结合,实现钢轨扣件区域的定位并提取;利用算子进行轮廓提取,再对扣件区域的主要形状特征进行模板匹配定位,得到固定螺栓和绝缘帽的中心坐标参数,通过比较距离位置特征,实现扣件状态识别。
1 图像预处理
设定线阵相机参数,采集到一系列的灰度扣件图像,其图像分辨率为4096×2048,与实际的扣件图像比例一致。图像增强不会增加原始图像中的信息量[5],而只是对待处理的感兴趣区域的数据信息扩展其数值范围,更有利于显示目标区域并且方便分割、提取等操作的进行。为了减少噪声干扰,对原始扣件图像归一化处理,采用对灰度的对数变换。对数变换就是将暗像素值进行扩展,高灰度值进行压缩,从而实现图像归一化能。结果如图1所示。

(a) 采集的扣件图像原图

(b) 变换后扣件图
2 扣件定位
霍夫变换是一种基础的识别形状的图像检测方法,用于从图像中提取出具有某种相同显著特征的形状,如边缘直线等[6]。本文利用霍夫变换检测钢轨边缘,霍夫算法会在参数空间中执行投票来决定物体的形状,特征检测的结果是把图像上的点分为不同的子集,从而进行形状判别和检测直线。对采集的图像进行霍夫变换,结果如图2所示。图2显示检测到多条特征线,可找出部分确认钢轨和扣件区域边缘所在像素。由于采集的多幅图像中部分区域的钢轨亮度逼近255(亮度为255,图中显示为白色),此部分钢轨灰度与周围灰度形成鲜明的对比,最易识别。为简化识别流程,可用部分钢轨的两侧边缘代替整个钢轨的边缘。
对其进行垂直灰度和水平灰度投影,结果如图3所示。垂直灰度投影通过两个低谷所对应的像素确定,可得到较为准确的部分钢轨两侧边缘的像素,水平灰度投影通过两个高谷所对应的像素确定,可得到较为准确的扣件区域边缘所在像素,从而获得扣件的粗略定位。因主要对扣件状态识别,粗略扣件定位可以提高整个流程的效率。

图2 霍夫变换的检测结果图

图3 垂直和水平投影结果图
采用“十字交叉法”对扣件区域定位,其基本原理就是在原始采集图像中搜寻到特征显著的水平的横线以及垂直的竖线,利用此横线和竖线十字交叉的中心坐标来定位出粗略的钢轨扣件区域[7]。同时结合霍夫变换和垂直水平投影的结果,以及轨道扣件的先验位置数据,提取出钢轨两侧的扣件区域,如图4所示。
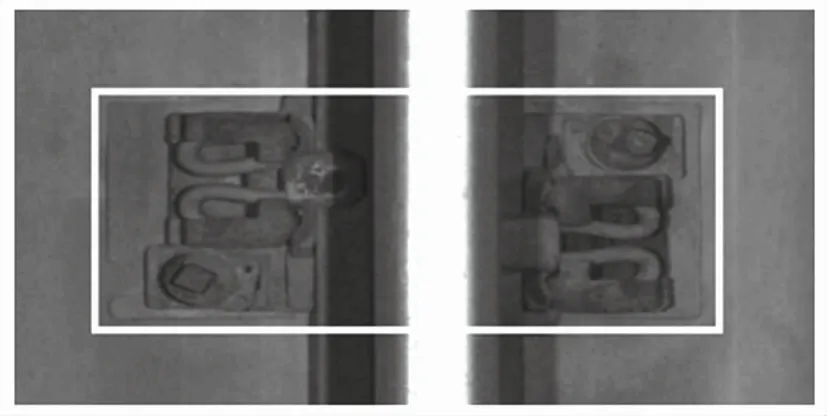
图4 扣件区域
3 扣件状态识别
3.1 轮廓识别
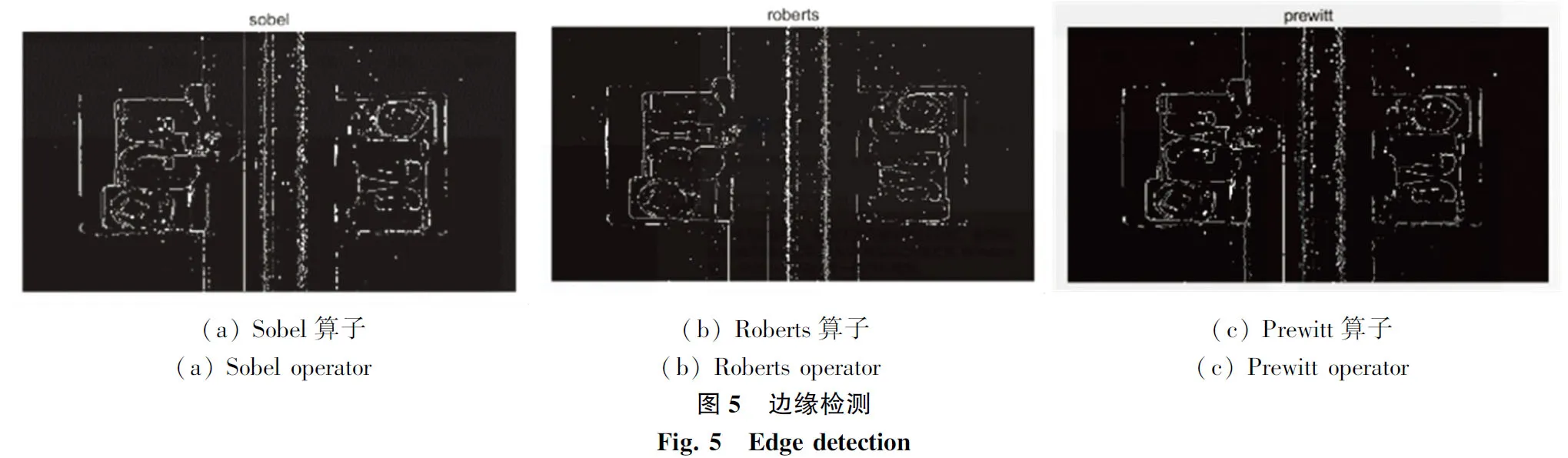
边缘检测算子的种类多样,而其基本原理都具有共同点,即通过对待处理图像中的各个像素点之间的灰度值变化速率来反映其边界信息,通常采用的卷积模版是基于灰度梯度值的,当模板与待处理图像中的某一个子图像重合时,对重合的像素点运用卷积计算,可以获取该区域中各个像素点的响应值,用来作为各个像素点的邻域灰度值的变化率,也成为灰度梯度值[4]。通过不断移动模板在整幅图像中进行卷积计算就得到了该图像的梯度图。常用算子为Sobel、Roberts、Prewitt算子,对图4结果图进行轮廓提取,结果如图5所示,其中Roberts算子提取效果较佳。
3.2 基于贪心算法的模板匹配
本文利用贪心算法来减少在原始图像中匹配到固定螺栓和扣件绝缘帽的时间,做出一系列选择使原始问题得到最快解决,即在模板匹配时,可选择哪一区域进行匹配,从而减少匹配时间。若将匹配模板中特征点与图像中的物体特征点的点积全部计算,需要庞大的计算量和时间,然而部分点积可以不计算。算法实行时,当匹配的数高于最小的匹配数mmin时,才可获取一个可能的匹配实例,以此再进行判断。用mj来表示前j个点的点积的计算之和,公式(1):
(1)
余下的点n-j的点积的和的计算公式(2):
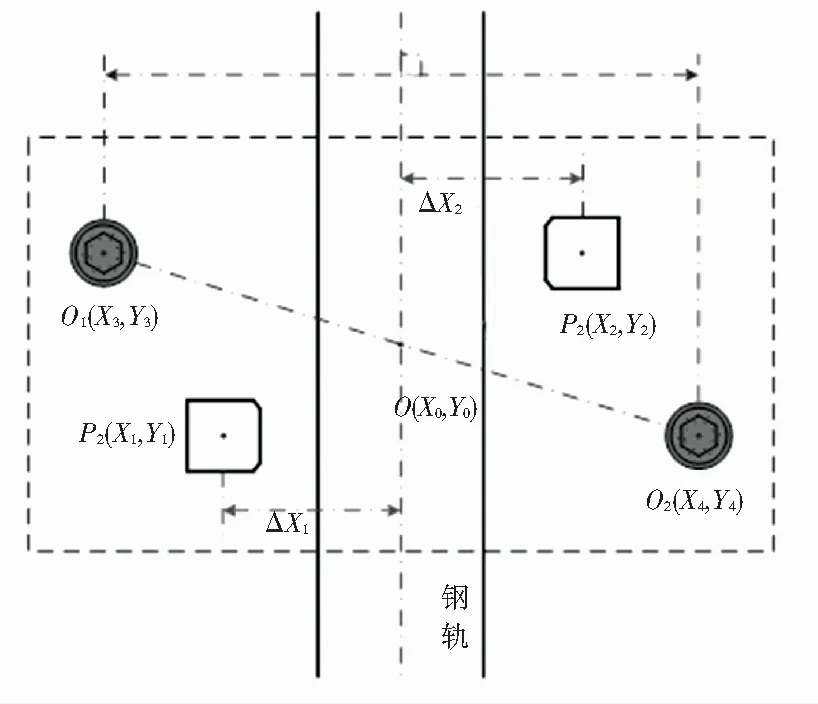
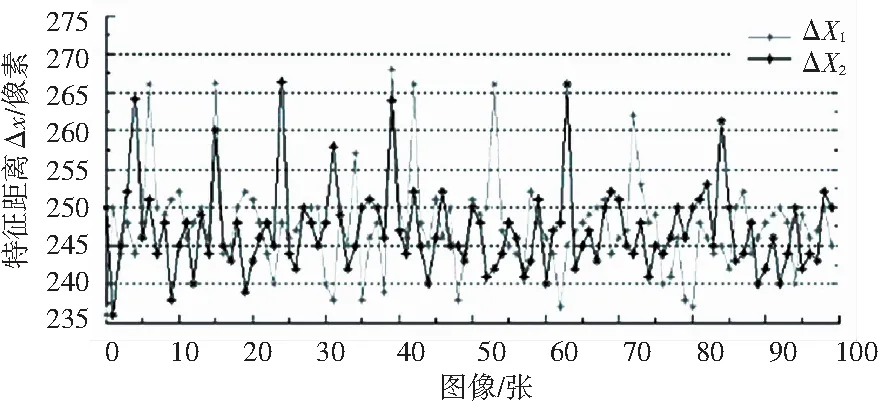
mj (2) 若公式(2)成立,则在计算完mj后便终止计算。在实际应用中,如果让所有的部分和mj满足此条件mj (3) 对处理后扣件区域进行分析,图像中的扣件绝缘帽(类方形)和固定螺栓(类圆形)具有较为稳定且均匀的灰度特征,因此将扣件绝缘帽区域及固定螺栓区域分别制作成子模板,采用基于贪心算法的模板匹配,对扣件区域图像进行多次模板匹配定位,取平均值,以获取扣件绝缘帽及固定螺栓的中心坐标参数。 基于位置距离特征的扣件状态识别算法,此为位置距离指的是一幅图像中左右两侧的扣件绝缘帽的中心位置距离钢轨中心线之间的绝对值距离。基于贪心算法模板匹配算法定位到的扣件区域多个特征位置,对扣件绝缘帽的特征区域的中心位置坐标进行计算,并与选定相对稳定的参考位置进行对比判断,统计所有特征距离,对其以一定标准分类,获取扣件状态信息,达成扣件状态识别的目标。此算法的优点之一是可以定量分析,获得当前待检测扣件状态的相对像素距离参数,可直观的在图中显示待进一步维修的扣件数目。 但此识别算法,需要选取一个相对稳定的参考位置。由于采集到的图像中整体的钢轨的边缘线并不具有显著区别于背景的灰度值,实验台搭载相机会随检测小车横向摆动,使得采集图像的钢轨中心线不稳定,获取不一定精确,因此钢轨区域的中心线不能作为相对稳定的参考位置。 而潘得路快速扣件本身具有的固定螺栓位置,相对固定的特点,钢轨左右两侧各一个,可以提取两侧固定螺栓的中心,具有良好的稳定性。因此,选取左右两个固定螺栓中点O1和O2连线的中点O(X0,Y0)作为特征距离参考点,参考坐标如图6示。 其中,O(X0,Y0)点坐标由算法定位得到的O1(X3,Y3)、O2(X4,Y4)坐标求得,如式(4): (4) 计算左右扣件绝缘帽中心点P1(X1,Y1)、P2(X2,Y2)和特征距离参考点O的水平相对距离ΔX1、ΔX2,如式(5): ΔX1=|X1-X0|,ΔX2=|X2-X0| (5) 图6 计算特征距离参考坐标 当ΔX1、ΔX2的值小于一定的像素阈值(该阈值通过先验实验求平均值所得),设该阈值为C1(pixel),若水平相对特征距离ΔX1、ΔX1小于该阈值C1,则扣件处于扣紧状态;相反,扣件处于非扣紧状态。 为了对算法进行验证,采用线阵相机实验台采集到1 000张扣件图像,由于扣件图像数量庞大,分为10组数据A1-A10,每组为100张,进行图像分析,图7即为扣件采集实验台。 图7 实验台装备 实验环境是在windows下运用OpenCV计算机视觉库,采用C++语言在Visualstudio2016境实现的。首先运用基于贪心算法的模板匹配,获取A1组扣件区域图像的固定螺栓及扣件绝缘帽的中心坐标参数OA1-1(X3,Y3)、OA1-2(X4,Y4)、PA1-1(X1,Y1)、PA1-2(X2,Y2), 基于位置距离计算,求取两个扣件绝缘帽的中心到两固定螺栓的中心线的相对特征距离ΔXA1-1、ΔXA1-2,选定判断阈值C(pixel),取先验实验的平均值分别为255(pixel)。重复上述步骤,对A2-A10组的扣件图像计算对应的相对特征距离ΔXAi1、ΔXAi2。其中,i=2,3…10。再利用Matlab2016a软件得到相对特征距离统计图,A1组和A2组的相对特征距离统计图如图8和图9所示。由统计结果及阈值C(pixel),可对这组图像的扣件状态进行分类,扣件状态识别结果见表1和表2。 图8 A1组的扣件状态识别特征距离统计图 图9 A2组的扣件状态识别特征距离统计图 表1 A1组扣件状态识别结果 表2 A2组扣件状态识别结果 将表1和表2检测的扣件状态与原始扣件图像的扣件状态加以比较,两者较为吻合,识别率达到99%。 本文探索潘得路扣件扣紧和非扣紧状态的识别,经过了图像采集、图像预处理、位置距离模板匹配,两固定螺栓的中心参数位置,扣件绝缘帽中心参数位置,计算相对位置特征距离参数。通过实验验证,发现选定的图像特征有利于扣件状态的识别,识别率接近99%,说明研究相对位置特征距离参数对扣件识别状态有效。
3.3 基于位置距离特征的扣件状态识别
4 实验与结论




5 结束语
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02高技术通讯(2021年3期)2021-06-09 06:57:48铁道建筑技术(2020年11期)2020-05-22 06:26:46西南交通大学学报(2018年5期)2018-11-08 10:58:08制造技术与机床(2017年8期)2017-11-27 02:10:22自动化学报(2017年5期)2017-05-14 06:20:56西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10 02:39:20光学精密工程(2016年1期)2016-11-07 09:01:59中国铁道科学(2015年5期)2015-06-21 06:53:20中国铁道科学(2015年4期)2015-06-21 06:46:04
