“新四化”背景下线控换挡器发展展望
2020-11-09 03:42栾伟胡锡胜黄锐景陈志勇王琪黄迅陈杰彬李瀛
汽车零部件 2020年10期
栾伟,胡锡胜,黄锐景,陈志勇,王琪,黄迅,陈杰彬,李瀛
(广汽零部件有限公司技术中心,广东广州 511447)
0 引言
在过去很长一段时间里,汽车换挡器一直唯机械挡杆独尊。随着整车电子电气架构的快速发展,线控技术(X-by-Wire)应用越来越广泛,特别是在线控底盘方面。线控底盘和驾驶息息相关的是线控换挡、线控转向、线控制动。自动驾驶中车辆行驶、转弯和制动依靠的即是这3种线控技术。线控换挡是实现智能驾驶的核心产品,其一方面省去传统机械式结构,换挡器体积小、布置灵活;另一方面可实现电控换挡,为辅助驾驶和无人驾驶奠定基础[1];线控换挡器能满足常规动力AT、DCT和新能源车型的换挡需求。目前,市场上主要的线控换挡器操纵机构形式有4种:(1)怀挡式,代表车型是奔驰、特斯拉;(2)挡杆式,代表车型有奥迪A8L、宝马5系、普锐斯;(3)按键式,代表车型有林肯MKZ、本田冠道;(4)旋钮式,代表车型是路虎极光、捷豹。这些新型线控换挡器的出现,相较于传统机械换挡器更安全、更智能、更易体现科技豪华感,线控换挡技术未来将会是国内外主流车型的标准配置。随着无线通信、人工智能、大数据及云计算等新技术不断应用到汽车领域,将不断驱动汽车智能化、网联化、电动化及共享化的研发与应用,汽车从单一的出行工具逐步转变为生活中的“第三空间”;线控换挡器的发展将面临诸多的机遇与挑战。
1 线控换挡器的应用
停车难是目前一二线城市中普遍存在的问题,因此自主泊车功能有着广泛的需求。目前,自动泊车技术已经接近成熟,但自动泊车仅仅是汽车找到车位后辅助驾驶者或者自动泊入停车位的过程,自主泊车作为自动泊车的高级形式,则是从汽车到达停车场到寻找车位、泊入车位都不需要人为干预,其智能程度远超自动泊车。实现自主泊车的车辆必须具有线控换挡的硬件基础。随着行业的发展,伴随着科技的进步以及基础设施的改进,未来,自主泊车系统必将成为一种潮流。同时,智能车库也是未来发展趋势之一,汽车停到车库入口处,车库会自主分配车辆位置,车辆自主泊车,这一切都将为线控换挡提供充分的应用市场空间。
智加科技使用林肯MKZ测试样车如图1所示,自动驾驶车辆中的算法最终控制执行机构的动作。线控技术不依赖驾驶员的力或扭矩输入,林肯MKZ混动版的刹车、油门和转向控制都使用线控技术,最重要的换挡采用按钮式线控换挡器,这正是实现自动驾驶的关键一步,使得林肯MKZ深受各大自动驾驶初创公司的欢迎,成为各大自动驾驶初创公司的主流样车。

图1 智加科技使用林肯MKZ测试样车
2 汽车电子电气架构进化及域控制器普及带来新变化
在传统整车电子电气架构体系下,控制器的设计通常基于特定的功能,即模块化和集成化设计思路。随着车辆的电子化程度逐渐提高,汽车ECU数量迅速增加,高端车型里的 ECU 数量平均达到50~70个,个别车型甚至超过100个。这样的架构存在着非常大的局限性:线束长度和质量剧增、传输信号带宽的局限、数据资源无法共享以及大量运算资源被浪费。域控制器DCU(Domain Control Unit)因为有强大的硬件计算能力与丰富的软件接口支持,让更多核心功能模块集中于域控制器内,系统功能集成度极大提高。这样外围感知与执行功能的硬件要求将降低,逐步变成只具备基本功能标准零件。
未来集中式汽车电子电气架构将分为3层,如图2所示,顶层为云计算服务平台,中层为车载计算控制平台(即域控制器),下层为机电一体化的标准化执行器和传感器控制器。一般将汽车电子电气系统分为5个功能域,分别是动力总成域、底盘域、车身域、信息娱乐域和辅助/自动驾驶域[2],线控换挡器归属底盘域。目前的线控换挡器系统有两种存在形式,一种的特点是集成式由2部分构成:换挡操纵机构GSM和换挡执行器SCU,GSM采集驾驶员的换挡动作综合逻辑判断后直接驱动SCU进行挡位切换。另一种的特点是模块化由3部分构成,换挡操纵机构GSM、换挡执行器控制器ACM和换挡执行器SCU,GSM采集驾驶员的换挡动作综合逻辑判断后向CAN总线发送挡位请求,ACM从CAN总线收到换挡请求后驱动SCU进行挡位切换。域控制器普及后,GSM仅保留换挡动作采集和发送挡位请求功能,底盘域控制器将集成原GSM的换挡逻辑处理软件包,SCU将集成在变速箱中并由变速箱控制器TCU驱动,ACM随之取消,线控换挡器极大简化。

图2 未来汽车电子电气架构构成
3 车载以太网、5G技术、高级别自动驾驶下的发展
高级别自动驾驶汽车需要域控制器、以太骨干网和5G技术的支持。新奥迪A8是第一款自称L3级别自动驾驶的汽车,拥有多个第一,例如第一个使用激光雷达,第一个使用域控制器,第一个使用车载以太网做骨干网的运算架构。即便如此,奥迪A8仍然不能算严格意义上的L3级别自动驾驶。5G技术为车联网带来更大的通信带宽和更低的延迟。使用以太网为车载网络骨干,集成动力总成、底盘、车身、多媒体、辅助驾驶,真正形成一个域级别的汽车网络[3]。各个域控制器在实现专用的控制功能的同时,还提供强大的网关功能。这种基于域控制器的架构将改变传统的车载网络中ECU到ECU点到点的通信方式,如:(1)在底盘控制域内部,各部件通过CAN、LIN总线实现数据共享(类似于传统车载网络架构);(2)在娱乐子网中,娱乐域控制器与其子部件的通信通过以太网实现;(3)当一个域需要与其他域交换信息时则经由网关、以太网路由实现。未来高级别自动驾驶的汽车将把域控制器、以太骨干网和5G技术作为标配。在车载以太网、5G技术和高级别自动驾驶的普及下,线控换挡器依旧挂在底盘域控制器下,换挡操纵机构GSM、换挡执行机构SCU和底盘域控制器之间通信采用CAN总线。车载以太网域级别架构如图3所示。
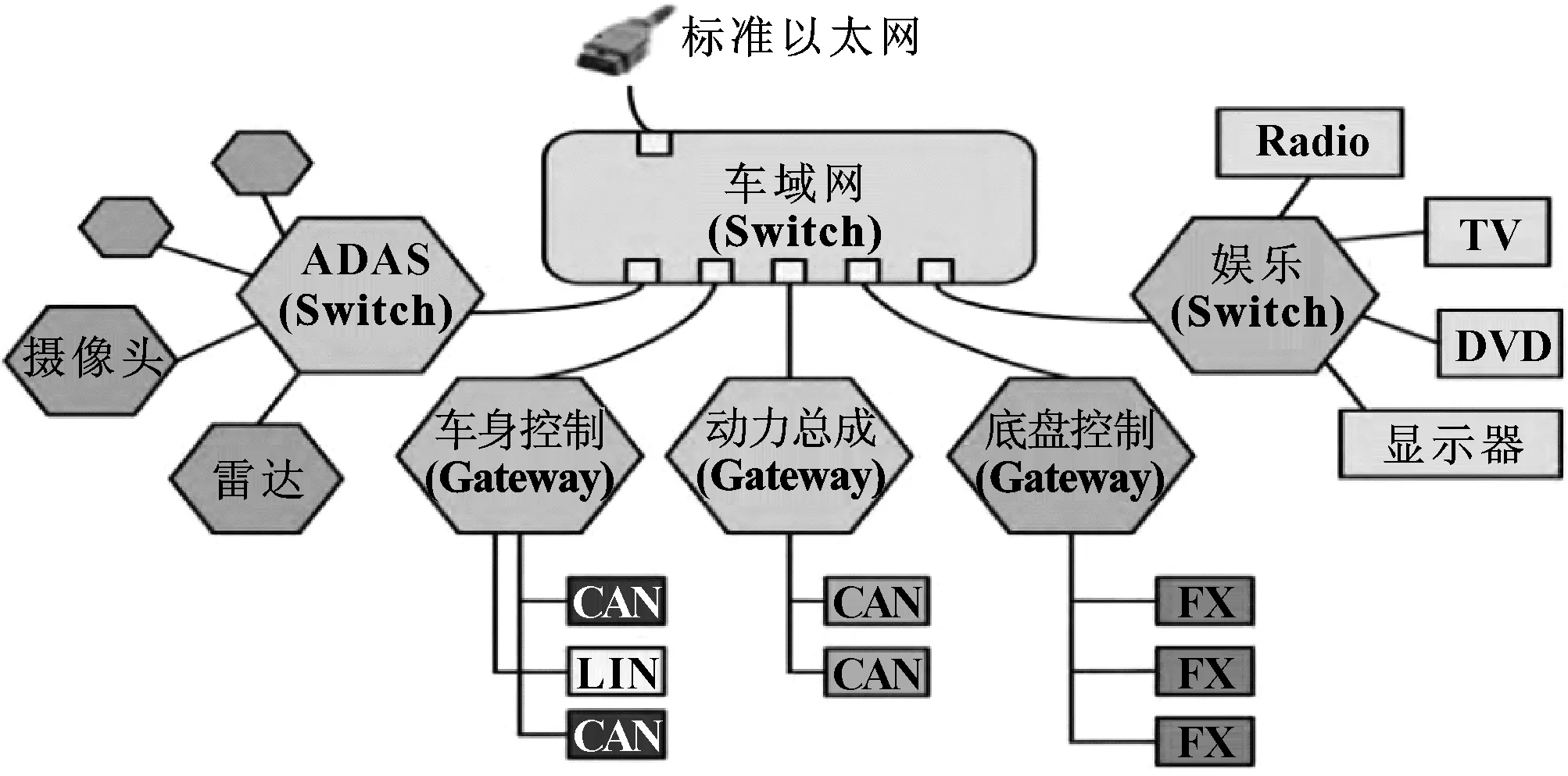
图3 车载以太网域级别架构
4 智能座舱的线控换挡器
随着消费者需求层次的不断提升,其对汽车的需求亦从单一的出行工具逐步转变为生活中的“第三空间”。
智能座舱发展大致有4个阶段:(1)电子座舱阶段。车载人机交互系统逐步整合,构成“电子座舱”。(2)智能助理阶段。触屏、语音、手势等多模交互技术应用[4],推动交互方式升级,生物识别技术应用,催生驾驶员监控系统迭代,增强车辆感知能力。(3)人机共驾阶段。语音控制和手势控制技术取得突破,基于多模感知手段的融合,使感知更精准和主动。(4)第三生活空间阶段。与其他“空间”不同,车辆自带可移动的属性,可以通过网联功能轻松实现线上与线下体验的无缝连接,基于车辆位置信息,融合信息、娱乐、餐饮、互联等功能为消费者提供加倍的便捷体验。
随着触摸、语音、手势等多模交互技术的突破,GSM传统的怀挡、挡杆、按键或旋钮等机械操纵结构将消失,其重点将是利用多模交互技术准确采集换挡交互动作,GSM体积将进一步缩减,可布置在任意方便使用的位置。中央处理器集成GSM的换挡动作识别软件包、换挡逻辑处理软件包和挡位请求发送功能,将ACM取消后,SCU集成在变速箱中并由TCU驱动。广汽ENO.146概念车座舱如图4所示。

图4 广汽ENO.146概念车座舱
5 结束语
在当前严峻的经济形势和市场环境下,当务之急是练好基本功,做好线控换挡器的可靠性设计和成本管理。随着汽车朝着智能化、网联化、电动化及共享化的不断发展,需要及早做好布局和预研,保持对用户潜在需求的关注,只有这样,才能在未来汽车行业发生巨变时从容应对。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车之友(2021年23期)2021-12-24
汽车零部件(2021年4期)2021-04-29
小猕猴智力画刊(2019年8期)2019-09-12
通信产业报(2017年6期)2017-03-27
通信产业报(2017年3期)2017-03-24
安徽理工大学学报·自然科学版(2016年2期)2016-12-22
企业技术开发·中旬刊(2014年7期)2014-09-23
科技资讯(2012年28期)2012-07-09