基于大数据云服务的交叉路口车辆信息共享系统
2020-11-09 03:41魏春鹏张鲁楠
汽车零部件 2020年10期
魏春鹏,张鲁楠
(北京汽车研究总院有限公司,北京 101300)
0 引言
随着城市化的快速推进,城市路网复杂化,道路路口视野死角将变得更多,路口交通事故数量亦随之不断增多[1]。城市交叉路口和车辆的庞大数量基数,使得整个交通系统的数据量非常庞大,这就是交通数据3V(大容量、多样性、高速度)特性之一:交通数据大容量的表现。仅以杭州市内道路卡口数据为例,每天达到约15 GB的数据量[2](该统计包含了微波采集技术、视频采集技术、环形线圈感应式采集技术等数据量)。车辆的位置及速度实时变化,这些数据具有连续不间断、规模巨大的特点,因此要求处理系统具有实时、连续处理大数据的响应能力。数据实时采集是智能分析预测的基础。大数据实时处理技术的发展,促进了大数据信息实时处理及行为结果预测技术的发展。
在交通数据分析方面,展示以下一个基于交通大数据分析,进行数据分析处理的具体案例。该数据分析平台是基于商用计算机构建小机集群,并使用Hbase进行大数据存储,通过MapReduce系统完成数据的分布式计算,并实现对交通数据的分析,以及未来趋势的预测[3]。在交通大数据处理平台中引入大数据实时处理系统,成为一种具有实时数据流处理的平台。此平台业务涉及各类交通应用场景并采集了相关数据,但没有涉及在获取如此巨大的实时数据后对车辆反馈指引方面工作。
文中在智能交通大数据处理平台上利用大数据实时处理系统,获取路口周边实时车辆位置和速度数据,并综合处理计算得出该路口是否会发生威胁某些车辆的危险事件,并给出相应处理意见。效果图如图1所示。本文作者主要从系统构建上给出一种可行性方案,不针对具体业务系统进行论证。
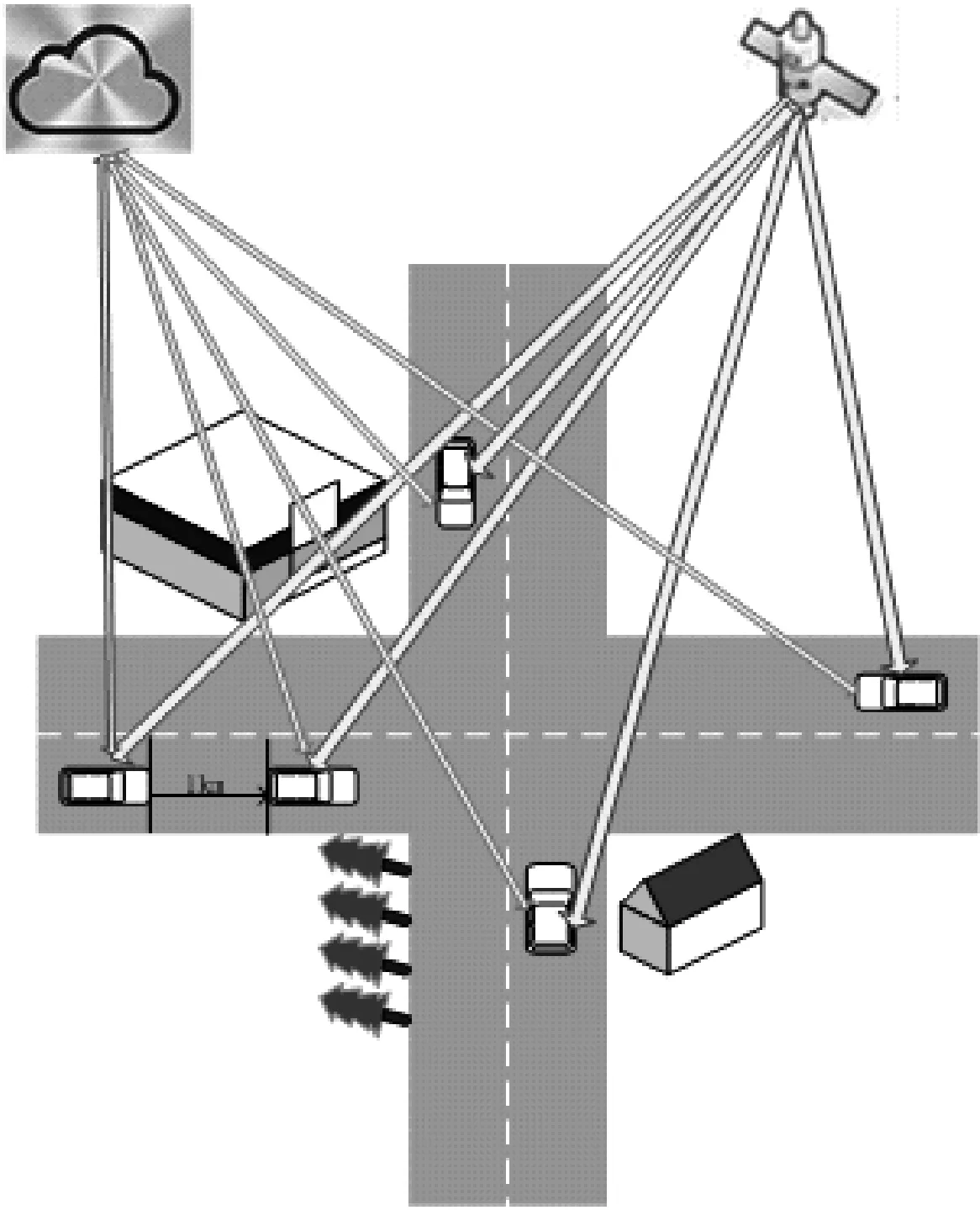
图1 交叉路口车辆信息共享示意
1 交叉路口车辆信息共享系统的功能需求与逻辑框架
1.1 车辆数据批量时效性分析技术
如上所述,交叉路口车辆信息共享系统需要的不仅仅是大数据采集存储,也不仅仅是处理速度实时性要求高的单一需求,该系统需要具有实时处理大数据能力,只有这样,才能更早地将预测的结果通知给驾驶者,从而引导驾驶人作出正确的行为。
云计算应用领域按照数据处理的时间性需求,可分批处理分析、近实时分析、实时分析。目前实时分析平台主要分为通用性分析平台(S4,Storm)及复杂事件处理平台两大类。复杂事件处理(Complex Event Progressing,CEP)是一种新兴的基于事件流的技术,它将系统数据看作不同类型的事件,通过分析事件间的关系,建立不同的事件关系序列库,利用过滤、关联、聚合等技术,最终由简单事件产生高级事件或商业流程[4],CEP平台主要有Hstreaming、StreamBase Complex Event Processing(CEP)/StreamBase LiveView、StreamBase SQLStream、OpenCQ等。
表1列出了S4、Storm、Hstreaming的平台特点。

表1 实时分析平台特点
1.2 终端数据采集
由于车辆在路上行驶,其位置实时变化,实时处理系统只有尽可能地准确获知其坐标位置,才能使得整套系统的危险预测更有利用价值。
(1)A-GPS定位技术
A-GPS通信技术,是一种结合网络基站信息和GPS信息对终端进行定位的技术,既利用全球卫星定位系统GPS,同时也利用了移动运营商的基站网络,是一种移动网络与GPS系统融合的定位技术。相较于传统的GPS系统,A-GPS技术具备了开机后快速完成首次定位、定位精度更高的特点。
(2)惯性制导定位技术
惯导系统是以加速度传感器及陀螺仪为主要器件的导航数据计算系统,惯导系统由陀螺仪输出的参数建立坐标系,并按照加速度传感器输出的数据计算车辆在坐标系中的具体位置以及速度等参数。惯导推算模块通过上述参数以及车速等信号进行实时计算,得出车辆具体的经纬度位置参数。
(3)视觉定位导航技术
视觉导航依据视觉图像,结合视频处理、标志物识别及动态算法处理等技术,通过视频捕捉车辆的运动状态及位置坐标,运用智能视觉计算,实现车辆的导航。
1.3 交叉路口车辆信息分析处理系统
智能交通系统(Intelligent Traffic System,ITS)是一套复杂而庞大的系统网络,通过将先进的信息技术、数据通信传输技术、电子控制技术以及计算机处理技术等有效地运用于整个运输管理体系,使人、车、路密切地配合,和谐地统一,从而建立起一种在大范围内,全方位发挥作用的实时、准确、高效的运输综合管理系统[5],提高了交通运输效率,缓解交通阻塞,提高路网通过能力。
文中仅涉及智能交通大数据处理平台中的实时处理子系统,整体系统逻辑框图如图2所示。

图2 整体系统逻辑
该框图主要分三部分:位置坐标获取、传输层、应用层。由于各种误差的存在,在车辆上采取了多种途径进行位置误差的修正,以追求位置的尽可能精确;传输层主要是车与云端的数据传输;应用层是基于云端地图的大数据处理,结合车辆位置坐标,确认车辆即将进入的交叉口,并汇总该交叉口的其他路口车辆信息(位置、速度、方向灯状态等),并通过算法策略预测出对驶入路口的每个车辆的危险事件。最终将有危险的结果反馈给驾驶人员。由于采用实时处理系统,所以该结果会不断更新。
2 交叉路口车辆信息共享系统构建
根据前面所述,该系统必须具有低延迟、高实时性、高容错性的特性,支持异构环境(基于成本和分步实现系统考虑),其核心技术包括大数据实时处理技术和终端数据精确定位技术。
整体系统示意图如图3所示。其中,基站提供了传输网络和LBS服务,卫星GPS提供了位置服务,云端提供了数据处理预测服务。未在示意图中体现出该方案为了使定位更加精确而采用的两项技术:惯性制导和视觉制导。
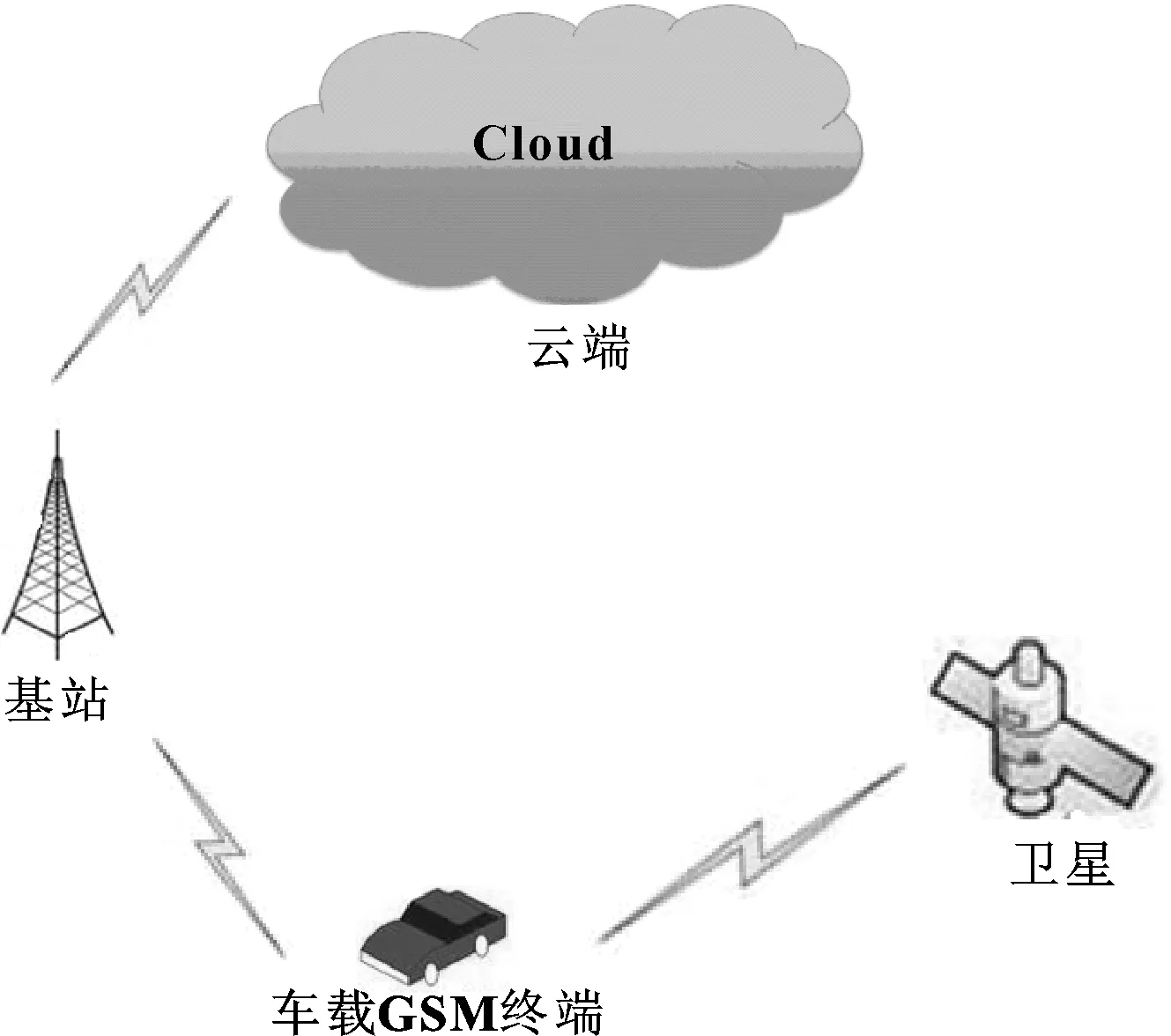
图3 整体系统示意
有效地精确定位加上实时的大数据处理系统,构成了方案的架构。
图4、图5为整个系统中上行和下行逻辑图。上行逻辑图里的位置数据修正,主要是依据LBS、惯性制导和视觉导航进行处理。具体见第2.2节。
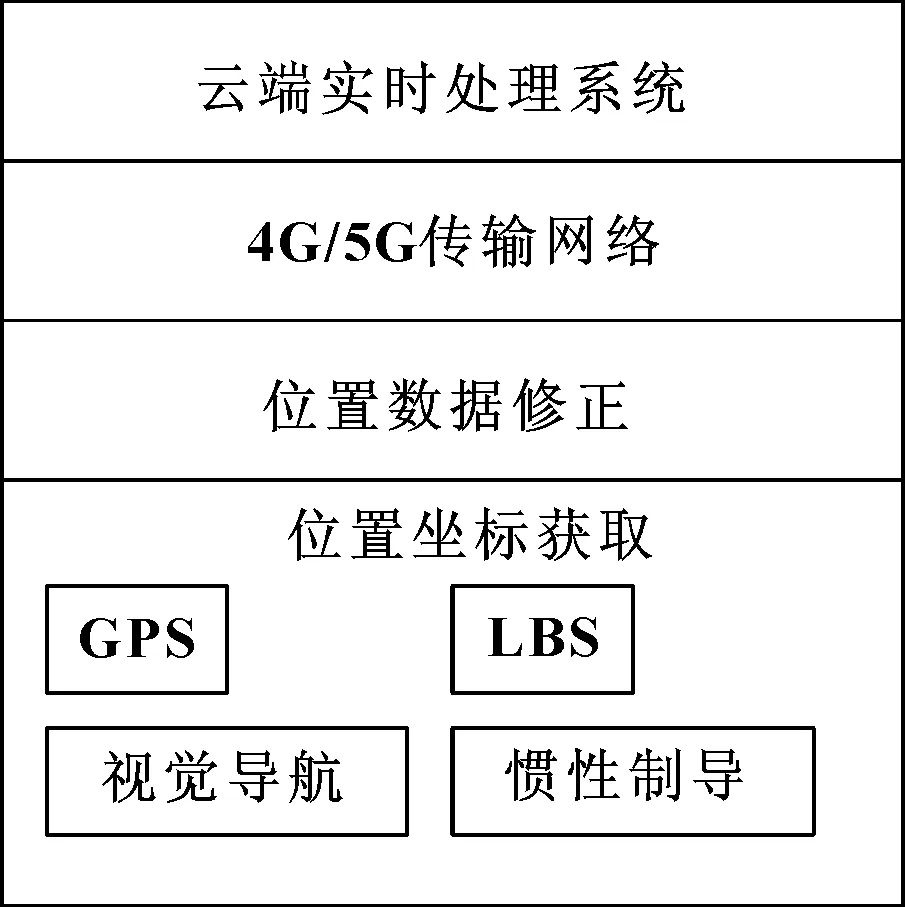
图4 上行逻辑

图5 下行逻辑
2.1 实时数据处理系统
鉴于Storm的特性:可被用于“连续计算”(Continuous Computation),对数据流做连续查询,在计算时就将结果以流的形式输出给用户[4]。该系统采用Storm框架作为实时处理系统。
Storm框架的数据流是通过运行一个Topology的拓扑实现数据流转,类似于Hadoop上运行的是MapReduce jobs。但Storm会持续不断地处理达到的数据,而不会自动结束该Topology。
Storm框架提供的基础组件有:Spout和Bolt。其中的Spout组件是信息源,即从外部数据源读取数据,并发送给Topology;逻辑处理组件Bolts,是用于将所有的消息处理逻辑被封装在Bolts里面,可以发送多条消息。Bolts可以一级一级处理传递,因此一个Topology的数据流如图6所示。

图6 Topology结构
Storm集群中共包含了两个主要节点,即控制节点(Master Node)和工作节点(Worker Node)。每一个工作节点上面运行一个叫作Supervisor的节点。整个工作机制如图7所示。
2.2 终端数据采集系统
该系统终端数据采集分两部分:一部分是位置数据、速度和车辆转向灯的状态等数据的采集;另一部分是从云端获取即将驶入的交叉路口周边车况的影响情况,并获得云端给出的危险提示。文中仅先讨论位置坐标精确定位,而对于实时数据处理的算法策略和终端获取云端数据信息放在下一步展开讨论。
由于传统的GPS定位系统受环境影响明显,尤其阴天、雾霾天气。首次定位时间长,甚至无法定位,对于该系统如果出现无法定位,则整个系统将因此而无法有效工作。为此采用A-GPS,利用移动基站的LBS服务,提高首次定位及由于天气带来的糟糕的定位效果。
传统GPS定位在车辆驶入高架桥或隧道时会出现定位无效。为此该方案在数据采集终端中采用惯性导航方案,集成陀螺仪和加速度传感器,以实现无GPS信号时的连续定位或驶入立交桥时无效定位变得可以保持精确定位。同时接受GPS定位坐标修正。
当车辆驶入多车道时,为了能精确判断车辆在一个路口的精确位置(如哪个车道,是否驶入转向车道)而不仅仅是距离路口的距离,同时由于惯性制导存在累计误差特性。数据采集终端采用视觉导航,主要利用摄像头拍摄路面信息,通过与车载地图比较,及车道上交通标线的识别,从而修正惯性制导误差,提高车辆坐标位置确认。
3 结束语
文中主要介绍了交叉路口车辆信息共享系统的基础理论及核心方案。首先,介绍了整个系统的开发背景、功能需求以及逻辑框架,并据此展开介绍了具体方案,同时着重介绍了其中的核心技术。其次,具体介绍了该系统针对交通信息的大数据分析,以及在交通大数据实时计算方面的可行方案。最后,介绍了系统原型的构成,并据此论证了方案的可行性。
通过上述成果,将进一步展开具体开发及验证工作,并着重对实时交通大数据的数据流处理及分析算法等方面展开重点研究。
猜你喜欢
价值工程(2019年18期)2019-07-25
世界家苑(2018年6期)2018-07-23
中国房地产业·上旬(2018年3期)2018-05-14
海峡姐妹(2018年2期)2018-04-12
人大建设(2018年12期)2018-03-21
杂文选刊(2018年1期)2018-01-09
建筑建材装饰(2016年22期)2017-08-14
人民交通(2009年9期)2009-10-29
小朋友·快乐手工(2009年4期)2009-04-28
中学英语之友·上(2008年1期)2008-03-20