
第三代自动泊车辅助系统
2012-07-09 22:04王伟华
科技资讯 2012年28期
王伟华
摘要:第三代PLA是一种通过探测车辆周围环境信息来找到合适的泊车位,从而控制车辆的转向、速度,使得车辆能够自主驶入泊车位的系统。自动泊车系统提高了车辆的智能化水平和安全性,进一步降低了新手司机驾驶车辆的难度,也为将来实现车辆的自动驾驶打下基础。
关键词:自动泊车 PLA2.0 传感器
中图分类号:U463 文献标识码:A 文章编号:1672-3791(2012)10(a)-0079-01
1 系统组成
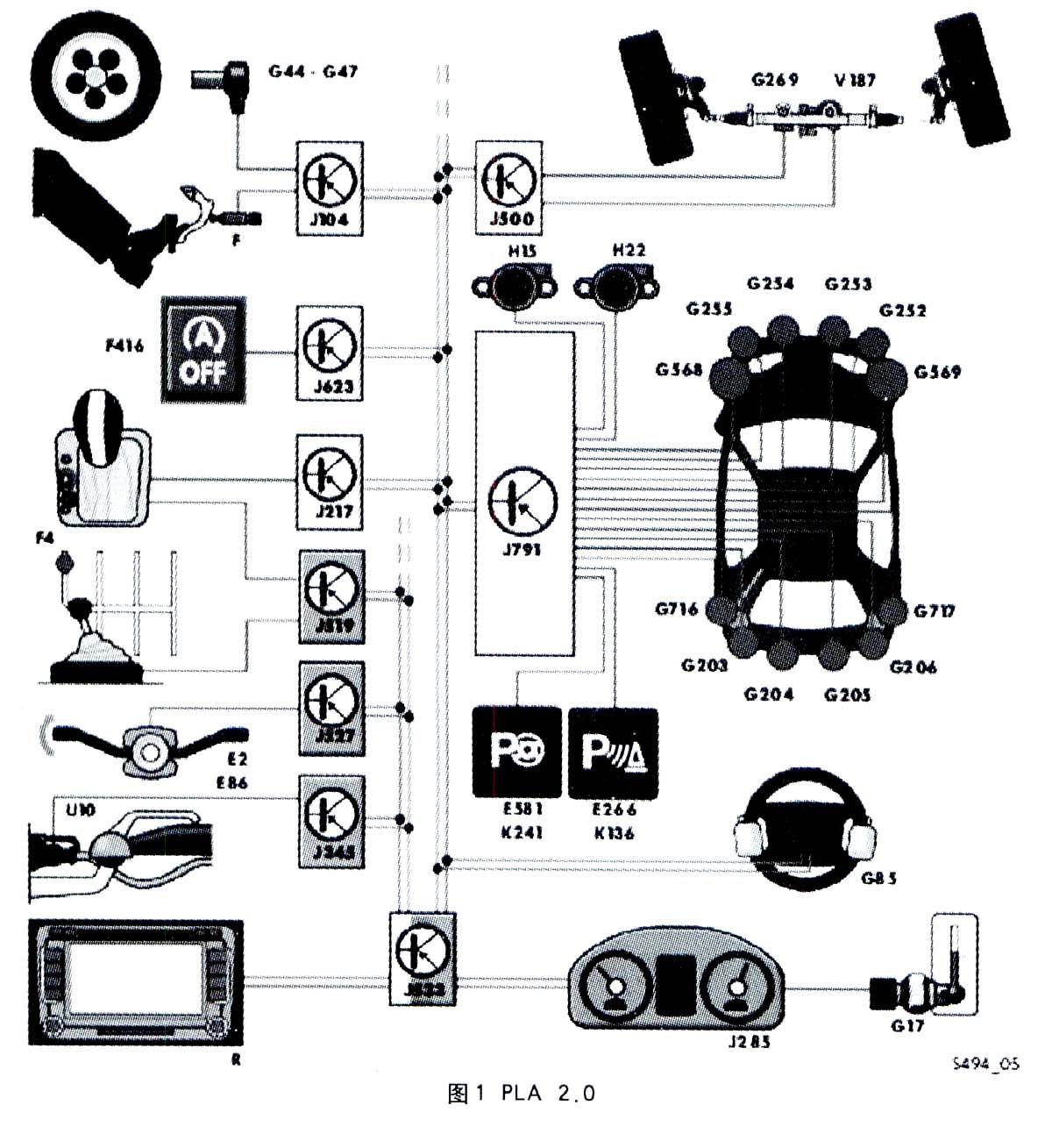
PLA2.0功能主要包括泊车辅助功能(泊车距离控制功能)和自动泊车辅助功能(即泊车过程的自动转向功能)。要实现自动泊车这样一个复杂的功能,需要车辆的八个子系统协同工作。下面是PLA2.0系统示意图(如图1所示)。
PLA2.0由以下器件组成:PLA系统控制单元(J791)、PLA按键(E581)、超声波传感器12个、系统警告蜂鸣器2个等。PLA2.0要完成自动泊车还需要其他关键的系统协助才能实现:电控机械式助力转向系统、制动系统、ABS、发动机和变速箱管理系统等。PLA2.0其中核心部件有以下几点。
1.1PLA控制单元J791
它通过动力CAN总线与其他控制单元通讯以获得相关数据,包括:ESP控制单元提供车速、行驶方向,方向盘的转向角度,坡路保持控制防止在泊车时溜车以及仪表控制单元负责信息显示,提供自诊断功能等。
1.2传感器
PLA2.0的传感器分为PLA传感器和泊车辅助系统传感器两类,它们均是超声波传感器。
PLA传感器用于探测泊车位,共有四个,前后保险杠两侧各装一个。其中前保险杠两侧的传感器,除了用于测量可用的泊车位,还用于在泊车过程中监测与旁边停泊车辆或障碍物的侧边距离,信号还会影响到驶过角的计算。而后保险杠两侧的传感器输出的信号一方面用于测量在垂直泊车时泊车位的实际宽度和位置,同时还用来评价车辆是否停入泊车位的正中间,以及用于监测在泊车过程中与侧边障碍物的距离。
泊车辅助系统传感器共有8个,前后各4个,均安装在前、后保险杠的塑料外板上。它们的位置布局使信号的覆盖范围产生少许重叠,所以不存在任何障碍物探测死角。这类传感器的信号被用来控制泊车距离,也用于实现自动转向功能。两种功能都需要通过测量车辆之间的距离以及车辆与其他物体之间的距离来实现,只要有一个传感器损坏,即会导致整个系统失灵。
2 功能与操作
2.1测量泊车位长度和激活PLA2.0系统
PLA2.0在向驾驶员提供转向帮助之前,必须先对泊车位进行测量,并识别车辆相对于泊车位的位置。即使系统未开启,车前后超声波传感器仍保持工作状态。在车辆前行过程中,当车速低于40km/h(平行泊车位)或低于20km/h(垂直泊车位)时,两个位于车前端的传感器便会测量车两侧所有可停入的泊车位。
每次进行泊车过程前都需要通过按键E581(如图1所示)来启动PLA2.0。亮起的PLA2.0指示灯K241表示系统已开启。组合仪表显示器上可能会显示已存在存储器里的泊车位,也可能还未确认和保存任何泊车位。然后就会要求驾驶员继续行驶。当启动后,在组合仪表显示屏上会出现提示:“请打开转向灯,挂入倒车档”。当车速在40~50km/h之间(针对平行泊车位)或20~50km之间(针对垂直泊车位)时,PLA切换至被动模式(待机模式)则系统不会被激活,同时仪表上会提示“车速过高”。
2.2入位操作
在测量到合适的泊车位且确定车辆位置恰当后,便可以开始进行泊车。在驾驶员开始进行自动泊车之前,必须先挂入倒车档,并在静止约0.5s后开动车辆。静止时间是指从挂入倒车档后到车辆真正开动的时间。在这段时间里,所有相关系统都会启动,并开始计算行驶路线。在自动泊车过程中无需驾驶员操控方向盘。由PLA来控制对方向的操作,并按照计算好的行驶路线驶入泊车位。在多次移车入位的过程中,驾驶员可以在组合仪表显示屏上看到前行或后退的操作提示。位于后部的两个轮速传感器G44和G46可以识别车辆是在前行还是后退。此外,在倒车过程中还将额外用到8个泊车辅助系统传感器和4个侧面PLA传感器来监控距离。当泊车过程结束后,组合仪表显示屏会提示自动转向辅助已完成。如果在自动泊车过程中识别到车辆所处位置有危险情况,或驾驶员介入了方向盘控制,自动泊车就会中止。
猜你喜欢
中学生数理化·高二版(2022年4期)2022-05-09
大众汽车·学术版(2019年1期)2019-10-20
小猕猴智力画刊(2019年8期)2019-09-12
汽车观察(2019年11期)2019-02-02
检察风云(2017年17期)2017-09-08
中学数学杂志(初中版)(2017年4期)2017-08-28
中学科技(2015年11期)2015-11-25
现代语文(2006年1期)2006-10-13