
基于机器视觉的植物水势测量装置设计
2020-10-17 01:16杨俊杰左志宇毛罕平张晓东王天宇
农机化研究 2020年11期
杨俊杰,左志宇,毛罕平,张晓东,徐 超,王天宇,缪 鹏
(江苏大学 现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
0 引言
水势是植物细胞和组织的重要水分生理参数。植物水势的大小对植物的生长影响重大,常被作为合理灌溉的重要生理指标之一[1-3]。
目前,国内外植物水势的测量方法主要有小液流法、压力室法和露点法:小液流法操作繁琐,结果不够精确;露点法每次测量前需静置较长时间,效率较低;压力室法因其简便易行,测量迅速而被广泛使用[4-5]。
压力室法判断水势测量终点需要操作者对待测样本截面渗液状况进行观察,以确定水势测量终点。由于观察者对出现渗液的判断标准不同,容易造成较大测量误差[6-9]。为了解决这个问题,有学者提出了采用探针、电极等接触待测样本截面渗液进行水势终点判断的方法,但均需要待测样本整个截面充满渗液才能进行判断,且具有一定延迟性,测量不够精确[10-11]。
本文利用待测样本截面出现渗液时光线发生折射、截面图像的灰度值出现变化的现象,提出了一种基于机器视觉的植物水势测量方法,并设计了相应的检测装置。利用机器视觉代替人眼进行观察,通过待测样本截面图像的灰度值变化量来判断水势测量终点,实现水势测量终点的准确判断。
1 整体结构
基于机器视觉的植物水势测量装置由检测台、控制箱、压力传感器、压力室、待测样本、环形光源、可调焦镜头、USB摄像头、光源支架、二位三通电磁阀、比例阀、减压阀,以及高压氮气瓶组成,如图1所示。
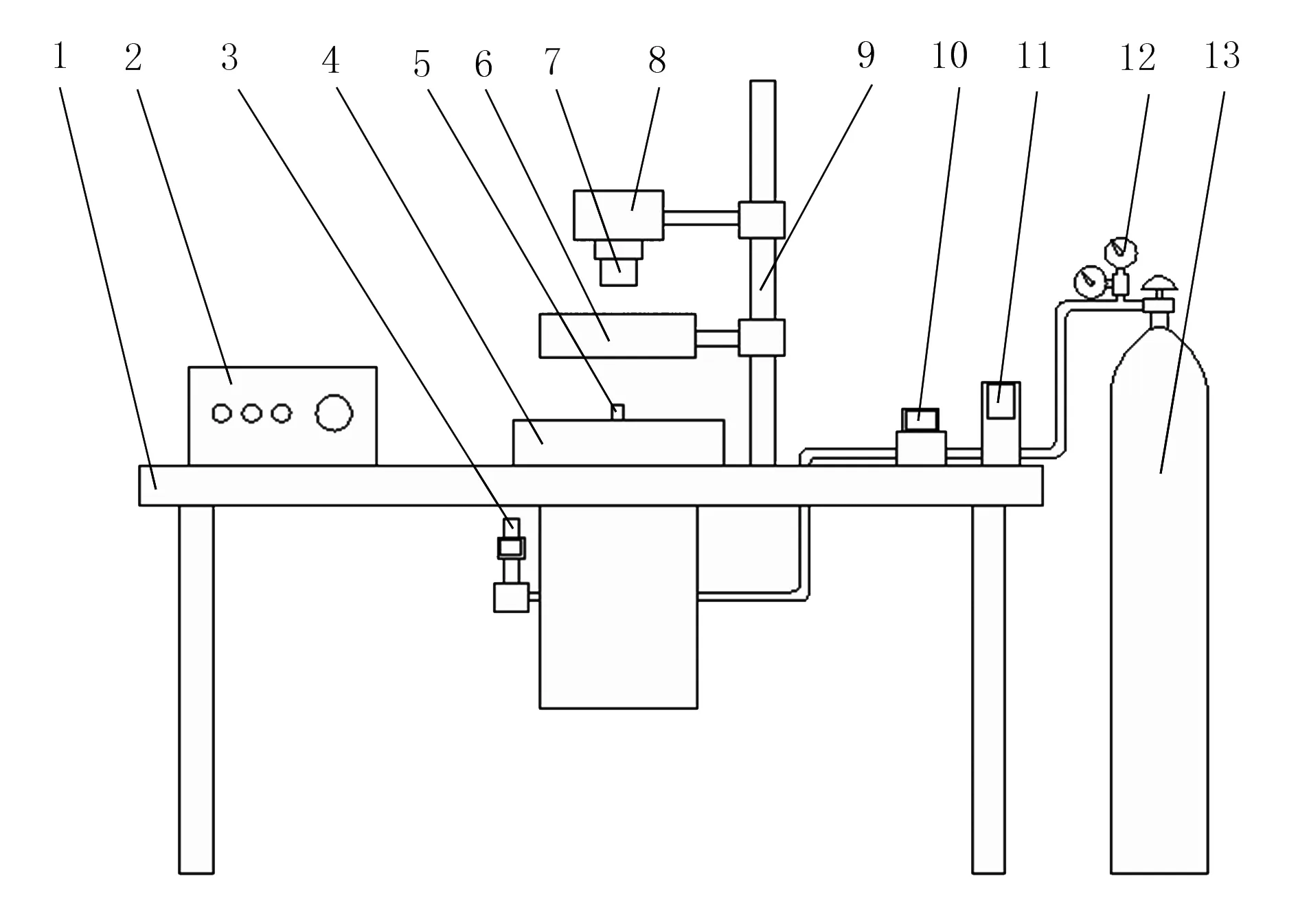
1.检测台 2.控制箱 3.压力传感器 4.压力室 5.待测样本 6.环形光源 7.可调焦镜头 8.USB摄像头 9.光源支架 10.二位三通电磁阀 11.比例阀 12.减压阀 13.高压氮气瓶图1 结构示意图Fig.1 Structural representation
测量装置工作原理:将待测样本装入压力室检测部位后,调节可调焦镜头使USB摄像头采集到清晰的待测样本截面图像;高压氮气瓶内氮气通过减压阀、比例阀、二位三通电磁阀对压力室加压,比例阀控制加压速度,同时由压力传感器采集压力室内压强、USB摄像头采集待测样本截面图像;控制箱内检测软件对待测样本截面图像进行处理、分析并判断是否出现渗液。如果出现渗液,则设定当前时刻为水势测量终点,停止加压,并记下当前压力室内压强作为待测样本的水势;否则继续加压,直至出现渗液。
2 控制系统硬件
控制系统由主控单元、数据采集单元、人机交互单元和执行单元组成,如图2所示。
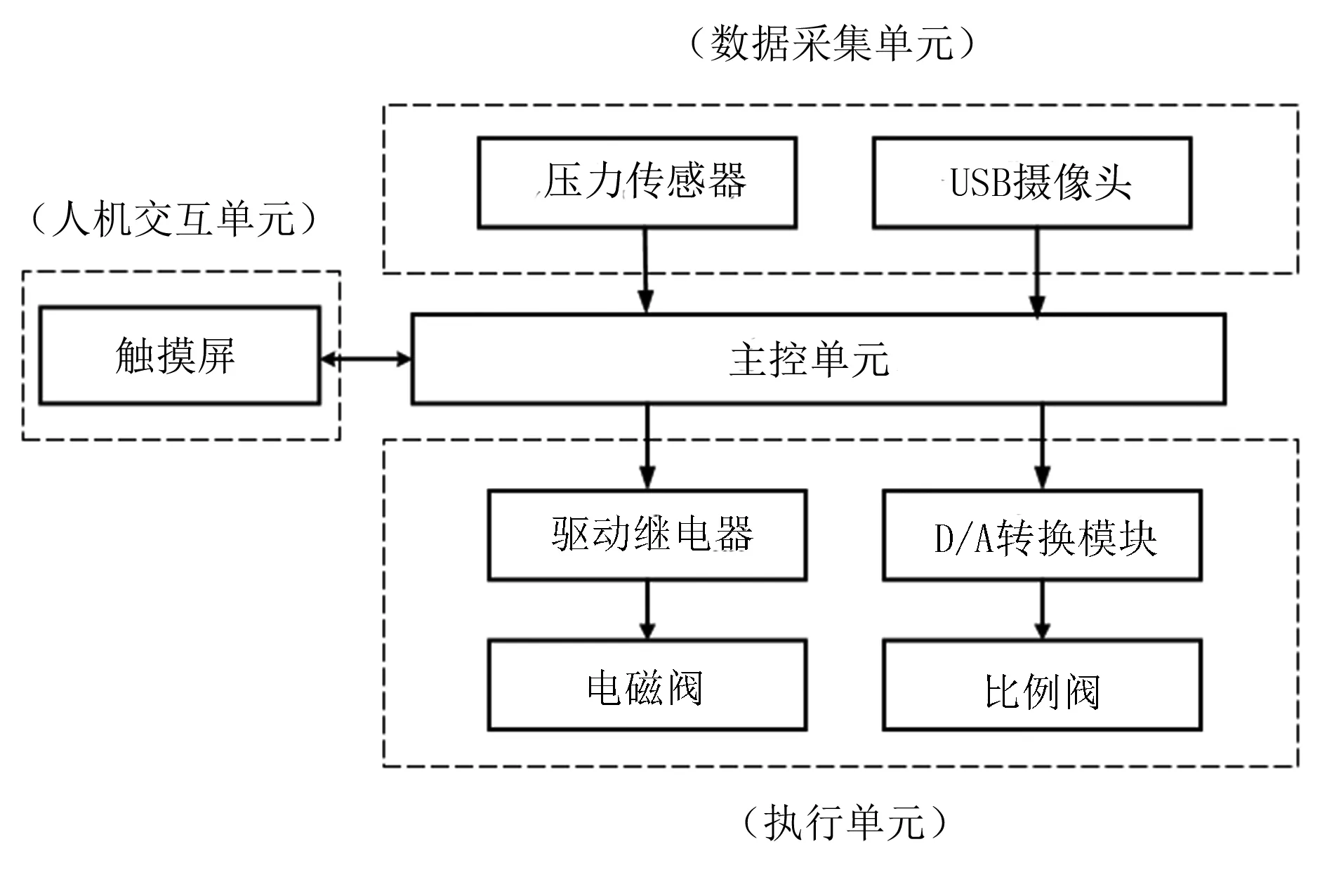
图2 原理框图Fig.2 Functional block diagram
2.1 主控单元
主控单元选用IMX6Q开发板,采用飞思卡尔ARM Cortex A9四核处理器,运行主频最高可达1.2GHz,标配2GB DDR3内存及8GB EMMC存储,系统支持Linux-QT/Android/Ubuntu操作系统,支持RGB/HDMI显示、双路USB接口、RS232串口等,能满足系统的工作要求。
2.2 数据采集单元
数据采集模块包括USB摄像头和压力传感器。USB摄像头选用QSC500N型彩色摄像头,采用1/2.5彩色CMOS图像传感器,支持YUYV/MJPEG图像格式,免驱支持Linux系统,摄像头通过USB接口连接时系统使用Linux内核中的V4L2驱动接口连接。为了获得不同样本截面的清晰图像,配置一个可调焦镜头,焦距范围为6~12mm。
压力传感器选用MIK-P300型压力传感器,传感器内的集成电路可以将传感器毫伏信号转换成标准电流信号。
2.3 人机交互单元
人机交互单元选用群创TQ070TN92C型7寸触摸屏,用于显示作物名称、系统工作状态、压力信息及水势值等信息,接收用户的功能选择和参数设置等输入信息。
2.4 执行单元
执行单元包括二位三通电磁阀和比例阀。二位三通电磁阀选用正泰N3V210型,采用开关量控制,由驱动继电器进行驱动,控制测量装置压力室的进气、保持和泄压等状态。比例阀选用SMC ITVX2030型比例阀,采用模拟量控制,控制测量装置的加压速度。
3 控制系统软件
3.1 水势测量终点判断算法
通过机器视觉检测水势测量终点,其原理是:在水势测量终点,压力室内的压力等于或稍大于待测样本水势,待测样本截面出现渗液,造成光线折射,引起待测样本截面图像灰度值发生变化。因此,通过待测样本截面图像灰度值的变化,可以判断待测样本截面是否出现渗液,当前是否到达水势测量终点。
水势测量终点判断算法包括以下步骤:
1)图像灰度化。由于摄像头采集到的图像均为RGB图像,因此首先需要将RGB图像转化为灰度图像,即图像灰度化。灰度化处理的方法主要有最大值法、平均值法和加权平均值法3种方法。
其中,加权平均值法最为合理,可以根据重要性和其他指标给R、G、B赋予不同的权值。灰度值Vgray计算式为
Vgray=WrR+WgG+WbB
(1)
式中Vgray—灰度值;
R、G、B—红、绿、蓝三颜色通道的分量;
Wr、Wg、Wb—红、绿、蓝三颜色通道的加权值。
当Wr=0.3、Wg=0.59、Wb=0.11时,能得到最合理的灰度图像[12]。待测样本截面灰度图像如图3(a)所示。

(a) 灰度图像 (b) 二值化图像 (c) 分割图像图3 灰度图像、二值图像和分割图像Fig.3 Gray image,binary image and segmentation image
2)图像二值化。图像二值化就是将图像上像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程,从而能凸显出目标的轮廓。
Otsu阈值法[13]是一种使类间方差最大的阈值确定方法,基本原理:把图像中的像素按灰度值用阈值T分成两类:C1和C2。C1由灰度值在[0,T]之间的像素组成;C2由灰度值在[T+1,L-1]之间的像素组成。两类之间的类间方差σ(t)2计算式为
σ(t)2=ω1(t)ω2(t)[μ1(t)-μ2(t)]
(2)
式中σ(t)2—类间方差;
ω1(t)—C1中包含的像素数;
ω2(t)—C2中包含的像素数;
μ1(t)—C1中所有像素的平均灰度值;
μ2(t)—C2中所有像素的平均灰度值。
其中,T在[0,L-1]范围依次取值,使σ2最大的T值即为Otsu法的最佳阈值。待测样本截面二值化图像如图3(b)所示。
3)背景去除。用二值化图像减去灰度图像,将获得的图像进行互补取得分割图像,实现将待测样本截面从灰度图像中提取出来,如图3(c)所示。

(3)
CUA—去除白色背景的像素点灰度值;
|CUA|—去除白色背景的像素点个数。
5)水势测量终点判断。将计算得到的样本截面图像灰度平均值与前一次的值相减,将变化量作为判断依据。当变化量在2~20之间,设定为待测样本截面出现渗液,即到达水势测量终点。
3.2 控制系统工作流程
控制系统工作流程如图4所示。系统上电初始化完成后,通过触摸屏设置待测样本的种类及测量部位。首先,采集待测样本截面图像,计算并记录其灰度平均值;然后,开始加压,主控制器进行水势测量终点判断。若没有到达水势测量终点,则判断压力室内压强是否接近当前样本预设水势下限;若没有接近预设水势下限,则返回加压步骤;若接近预设水势下限,则减小加压速度,返回加压步骤;若已到达水势测量终点,则记录当前压力值为待测样本水势,然后泄压。
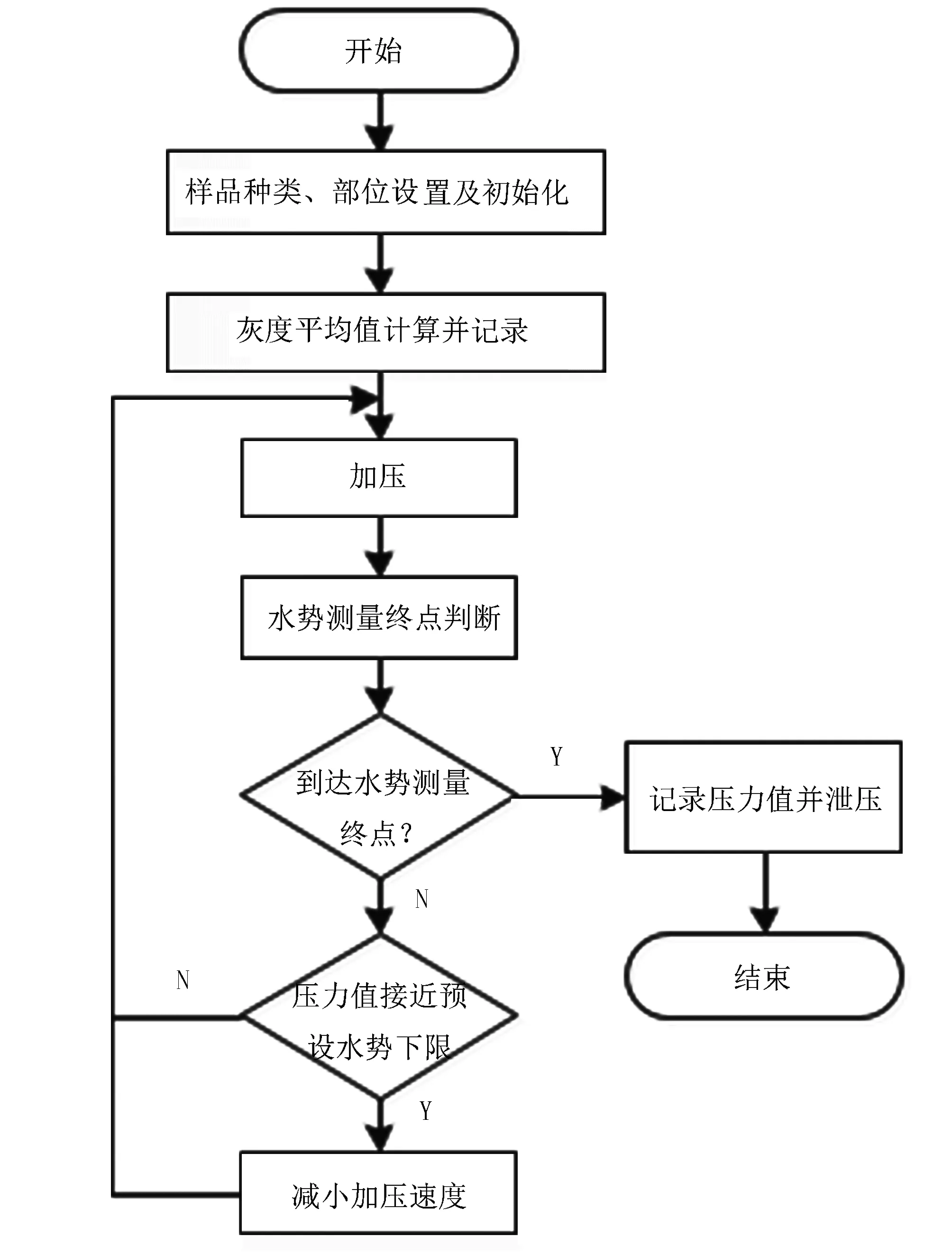
图4 控制系统工作流程Fig.4 Control system workflow
系统流程图中水势测量终点判断子程序如图5所示。在USB摄像头采集待测样本截面图像传送给主控制器后,进行图像灰度化、图像二值化、背景去除处理,计算灰度平均值;将该灰度平均值与前一次的值相比,若差值未大于2,则输出0,表示待测样本未出现渗液,未达到水势测量终点;若差值大于2,则输出1,表示待测样本出现了渗液,已达到水势测量终点。

图5 水势终点判断子程序Fig.5 Water potential terminal judging subroutine
4 样机性能试验
待测样本选用合作908粉红番茄20株,通过山崎番茄营养液配方培育8周。基于机器视觉的植物水势测量装置的光源选用环形光源,照明方式设为漫射照明,照明方向为垂直照射,光照强度定为3000Lux,如图6所示。
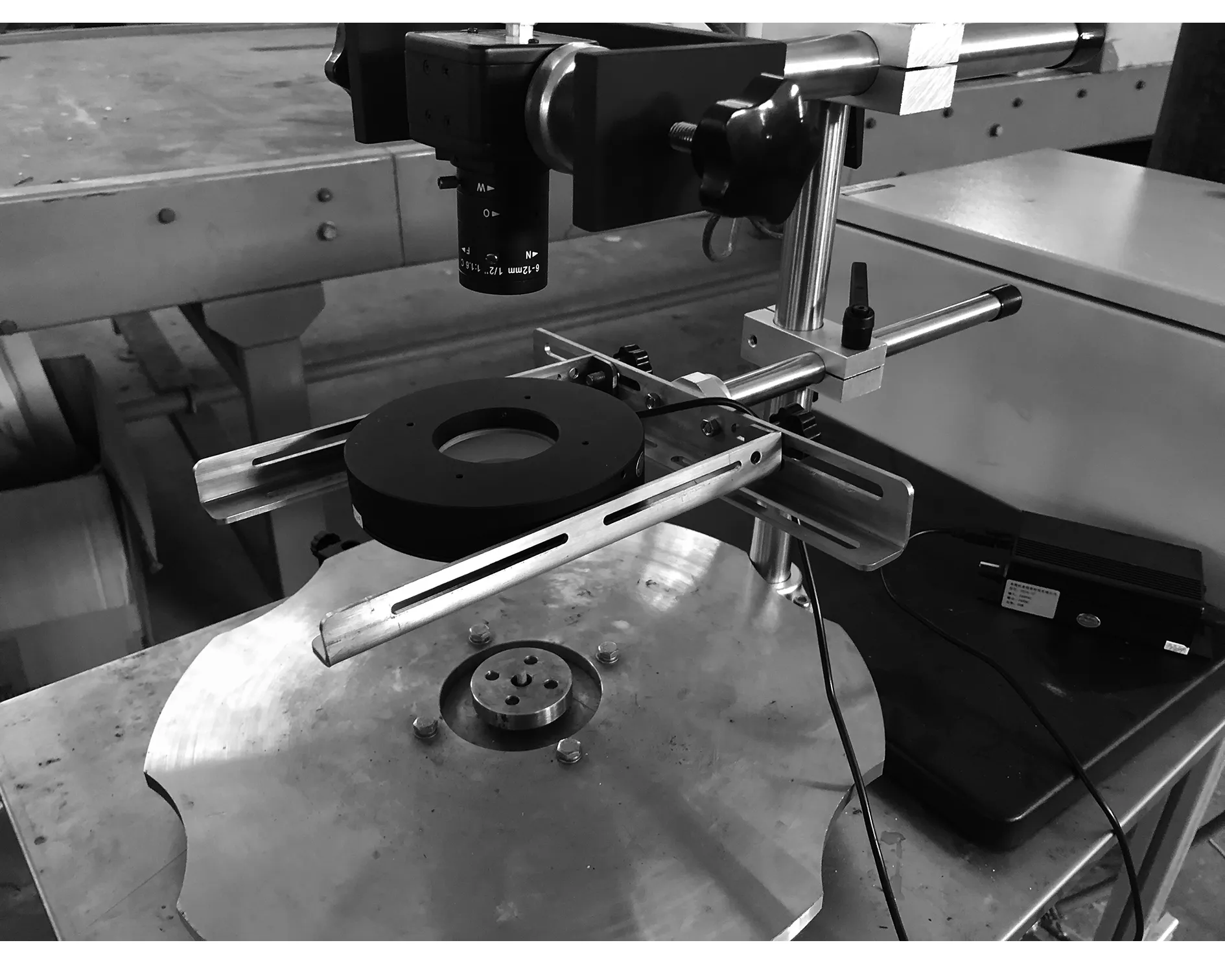
图6 试验中的水势测量装置Fig.6 The water potential detection device in experiment
样机和人眼观察同时对同一株水势进行判断、测量。样机自动测量和记录番茄样本水势和测量耗时,记为A组;人眼观察、判断并手动记录番茄样本水势和测量耗时,记为B组。为减少人为误差,采用3人同时观察并分别记录数据,以3人记录的平均值作为B组数据。试验中的水势测量装置如图6所示,待测样本水势数据如表1所示。
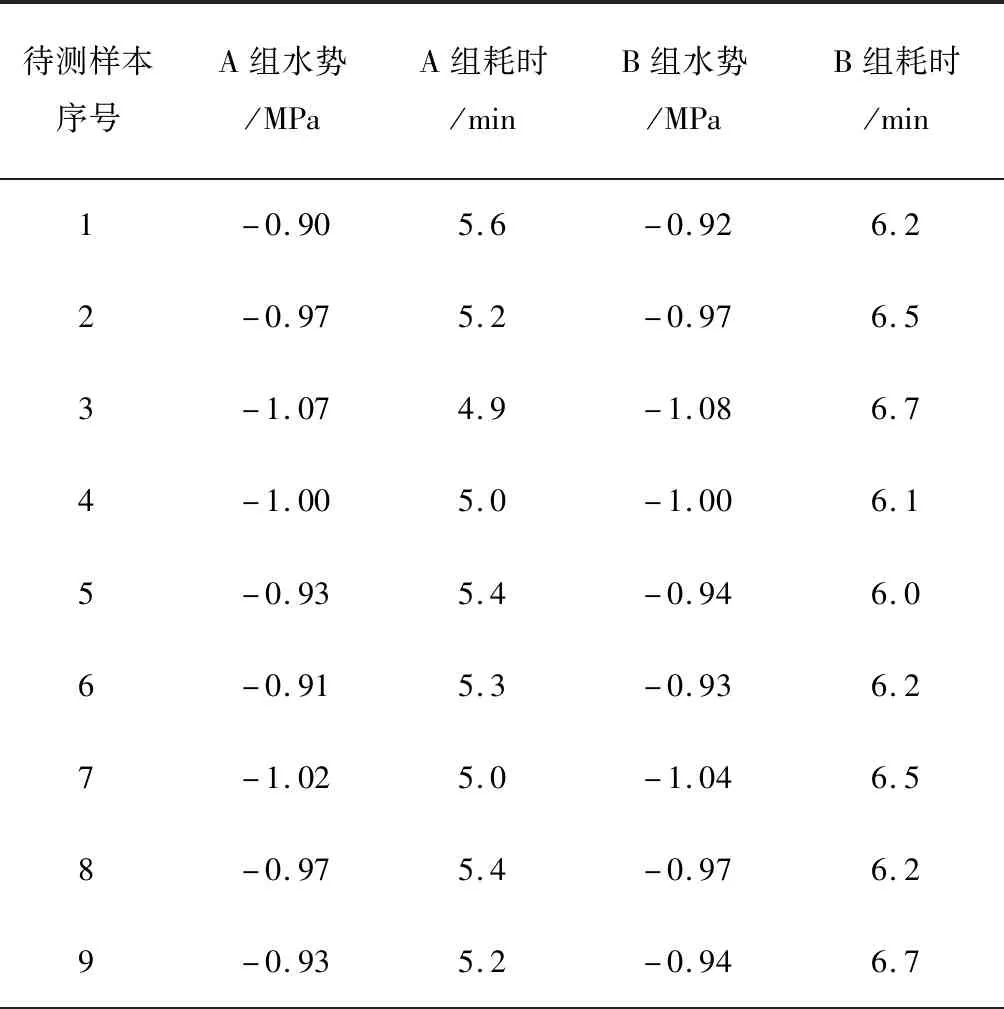
表1 待测样本水势数据Table 1 Water potential data of samples
样机测量一个样本平均用时为5.2min,人眼观察测量一个样本平均用时为6.2min,样机平均节约用时16.1%。与人眼观察法相比,水势测量平均误差为0.01MPa,相对误差为1.11%。
5 结论
提出了一种基于机器视觉的压力室法植物水势测量终点判断方法,并开发了相应的测量装置。试验结果表明:基于机器视觉的压力室法水势测量方法可行,测量速度更快,测量精度较高。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
中国医学创新(2021年1期)2021-05-06
健康必读·下旬刊(2018年9期)2018-10-09
电子测试(2018年13期)2018-09-26
锦州医科大学学报(2018年1期)2018-03-22
水利科技与经济(2016年3期)2016-04-09
水利科技与经济(2016年4期)2016-04-09
水利科技与经济(2016年2期)2016-04-09
汽车维修与保养(2015年8期)2015-04-17
