
基于参数优化的植保无人机飞控系统性能分析
2020-10-17 01:16张莉
农机化研究 2020年11期
张 莉
(永城职业技术学院,河南 永城 476600)
0 引言
近年来,我国农业植保无人机的技术飞速发展,应用覆盖面逐年提升,业内不少专家学者对其展开更为深入与精确的研究,针对植保机的飞行姿态控制、耦合性能优化及轨迹传感融合等方面均有涉及。用于农田喷药或灌溉的植保无人机动作控制属于牛顿欧拉与动量平衡模型,以自动升降、远程操控、无人作业为特征。为进一步改善其作业的效率及飞控系统的执行性能,拟以飞控核心控制参数优化为切入点,选择飞控系统的平稳度作业区间为研究对象,以整机性能指标稳定高效为目标,考虑空间停留位置及角度等信息,基于轨迹与驱动的核心算法展开讨论。
1 植保机飞控系统原理
图1为某田间植保无人机施药作业现场。根据植保无人机的主要结构性能参数(见表1),可将该植保无人机的飞控系统执行原理简要概述为:机体执行变量/定量喷洒模式,经地面控制中心监控与宏观调整,用手持遥控装置对无人机的飞控系统给出相关指令;控制系统接收指令信号后,经数据处理与转换为可被喷施装置执行的命令,各喷施部件展开相应动作。其间,机体飞行气流、喷洒雾滴与飞行高度、速度等参数互相影响变化,从而形成指令化的田间控制施药作业。植保无人机控制流程如图2所示。

图1 植保无人机施药作业现场Fig.1 Pesticide spraying operation scene of the crops protection unmanned aerial vehicle

图2 植保无人机的飞控系统控制流程简图Fig.2 Flow chart of the flight control system of the plant protection UAV

表1 植保无人机的主要结构性能参数Table 1 Main structural and performance parameters of the crops protection UAV
植保机动力提供源泵体的均匀化参数调控与设置是实现该飞控系统准确控制的核心环节之一,主要包含泵的流量与压力、电机的执行参数及药液的体积控制等。经初始化的飞控系统需对飞控指令进行等值化匹配及飞行参数判定,才能输出正确的执行动作,以符合指令停止参数为最终判定依据,执行一次控制作业。
2 参数分析及系统优化
2.1 数学模型建立
植保无人机飞控参数与喷洒作业参数密切相关,以平稳自然条件为前提,保证作业的均匀性为目标,建立植保无人机作业参数控制模型,即
CV=β0+β1T+β2P+β3H
(1)
式中CV—植保机飞控系统作业指标变异系数;
T—植保无人机配备的喷施装置类型;
P—植保无人机喷施装置压力(MPa);
H—植保无人机作业的喷施高度(cm);
β0、β1、β2、β3—植保无人机作业参数模型回归系数。
植保无人机的飞控系统核心控制模型,如图3所示。由图3可知:整机控制在变异系数初始值r(t)的条件下展开,通过设定参数值与位姿值的对应关系,在控制系统的跟踪目标ym(t)的实时调整下,NNC与NNI间接配合,输出植保机飞控系统的参数控制值;此时,设定初始值与实际作业运行值的差距e(t)被及时反馈至初始位置,形成闭环控制模型。

图3 植保无人机的飞控系统核心控制模型Fig.3 Schematic diagram of the core control model of the plant protection UAV flight system
以参数优化为手段,飞行能耗与误差之间的平衡点为最佳设计指标,针对整机飞控系统的控制装置,建立飞控系统的二次型性能指标控制模型,即
(2)
式中u—任意变化值;
Q—指标模型半正定常数矩阵;
R—指标模型正定常数矩阵。
2.2 系统硬件优化
参数综合优化后,对整机飞控系统硬件配置进行结构布置,如图4所示。主控制模块主要由定时器、IIC、USART等组成,与数据传输接口、远程控制接口、姿态测量接口和电机驱动接口实现远程智能调控,针对轨迹偏离与着落位姿态进行解算通信,完成无人控制功能,并对电机的PWM幅度的调控进行内部输入输出控制。
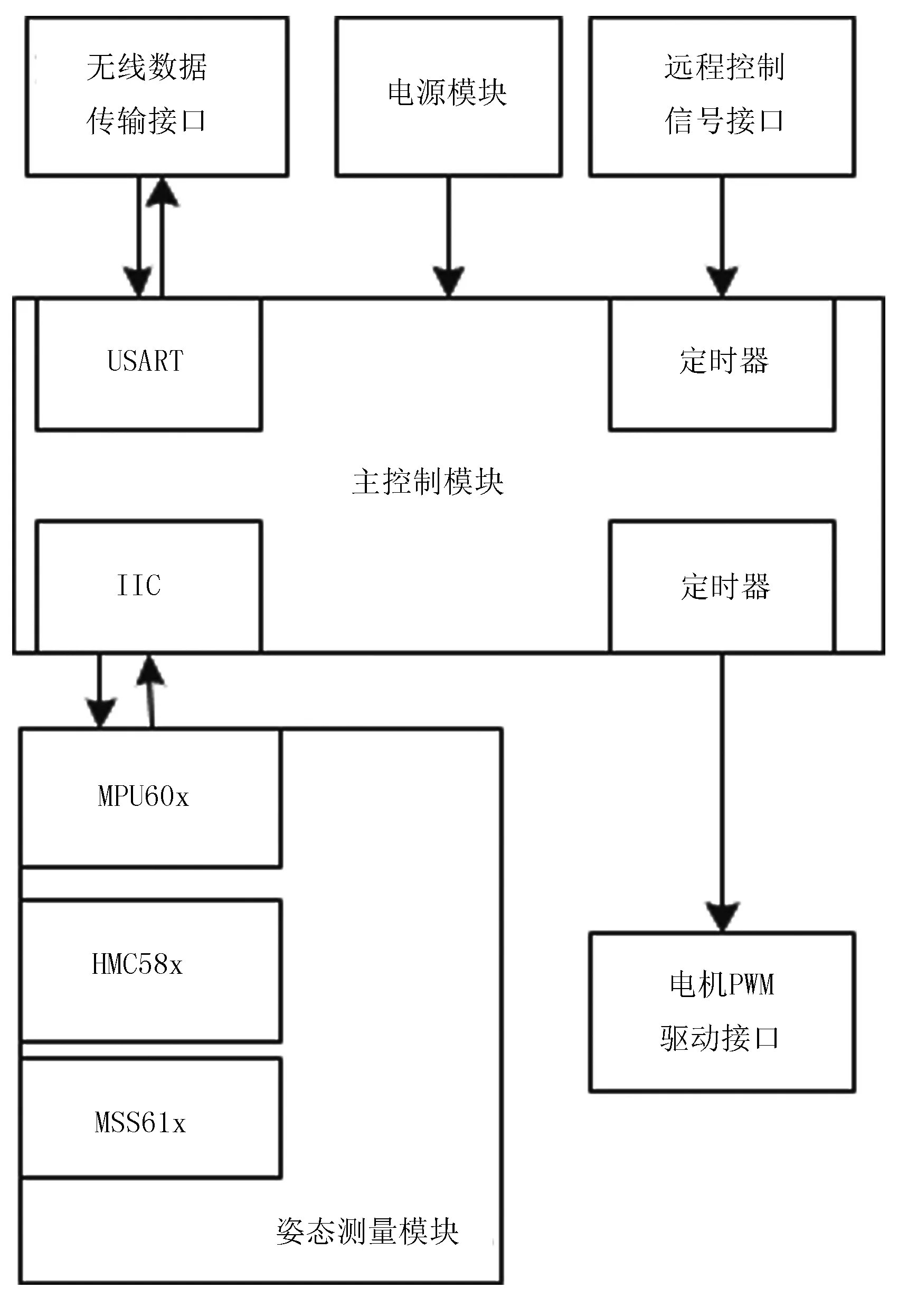
图4 植保无人机飞控系统硬件结构布置简图Fig.4 Diagrammatic sketch of the hardware layout of the UAV flight control system
为确保控制装置的性能稳定,增设抗干扰控制装置,图5给出了植保无人机的飞控姿态内部关系。
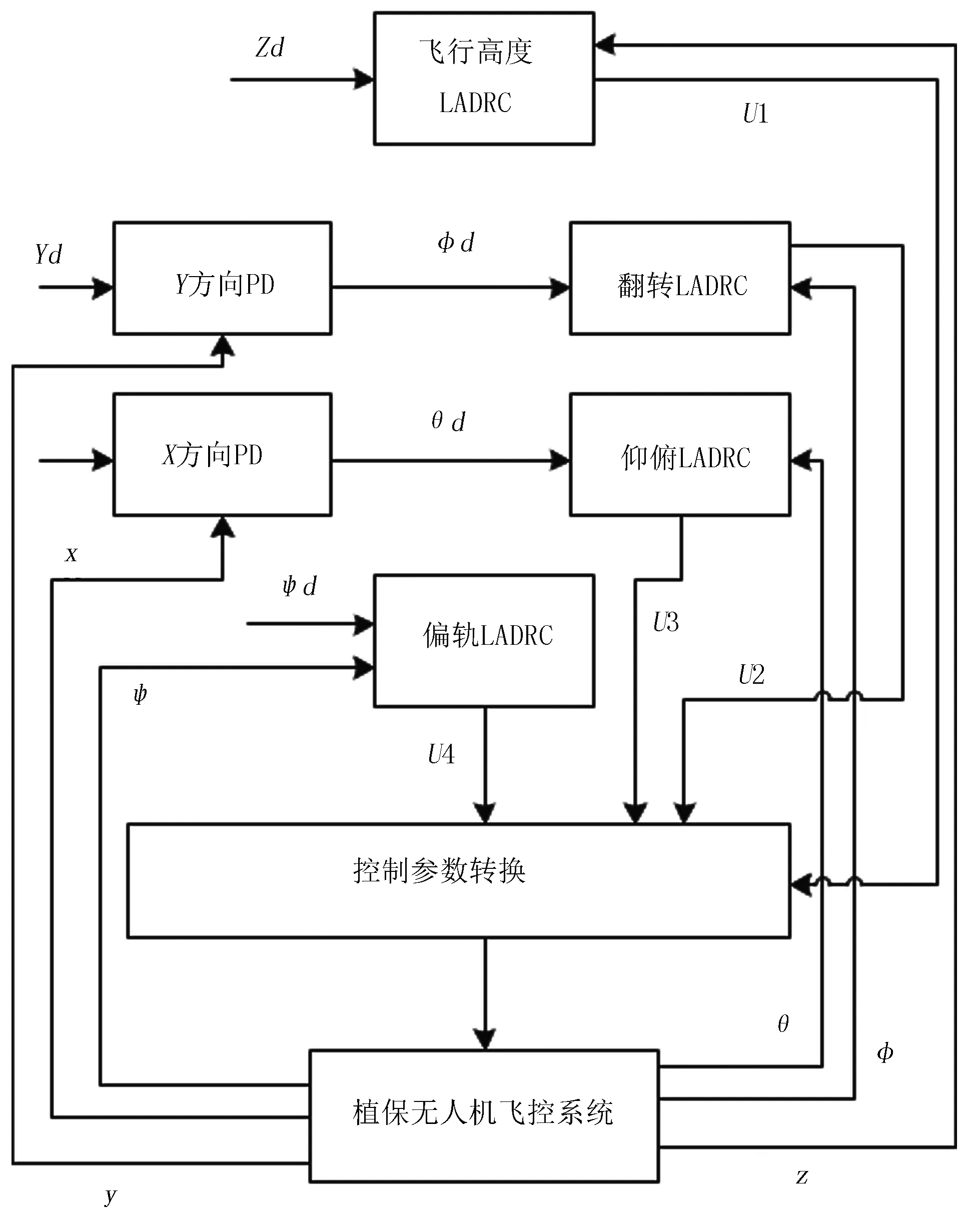
图5 植保无人机飞控姿态内部关系简图Fig.5 Internal relationship diagram of flight control posture of the crops protection UAV
由图5可知:X、Y方向与机体翻转、俯仰角度在控制参数转换系统中实时进行,确保飞行位姿与作业参数的强耦合度;同时,远程监控基于ANDROID平台,针对着陆模块增设自主避障控制指令,信号的采集、滤波与控制转换形成多通道的精准参数处理模式,最终经控制执行反馈装置达到预期的作业轨迹。
2.3 系统软件调控
无人机飞控系统软件关键参数配置,如表2所示。
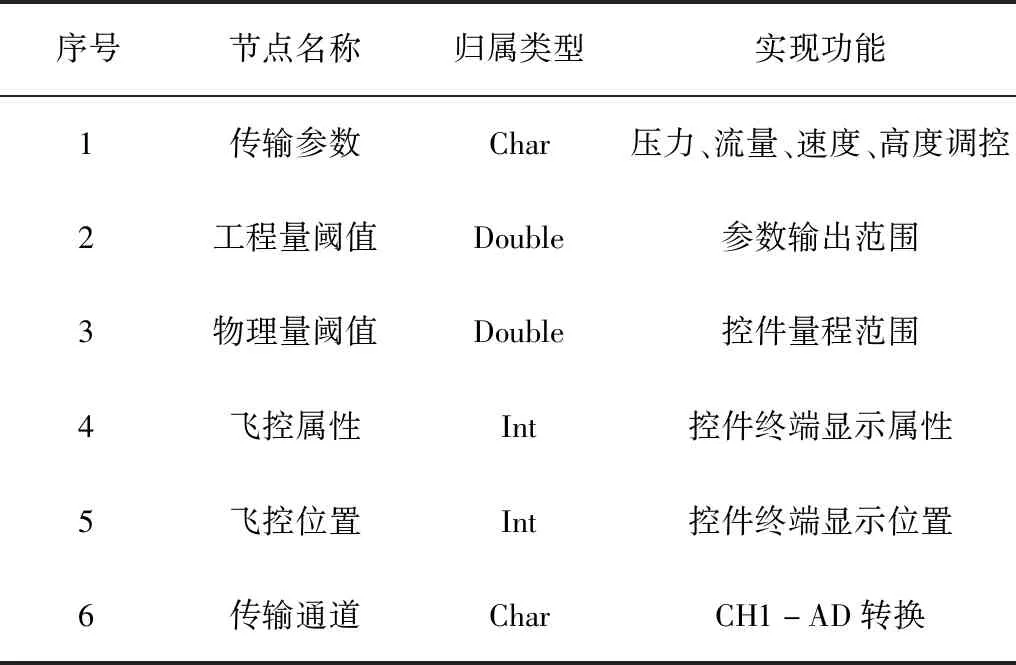
表2 植保无人机飞控系统软件关键参数配置Table 2 Key parameters settings of flight control system software for the crops protection UAV
针对飞控系统软件,建立控制参数的信息处理综合应用系统,以控制迭代算法为工具,设计功能简图(见图6),通过数据链路处理,实现系统配置、界面管理与性能测试等。
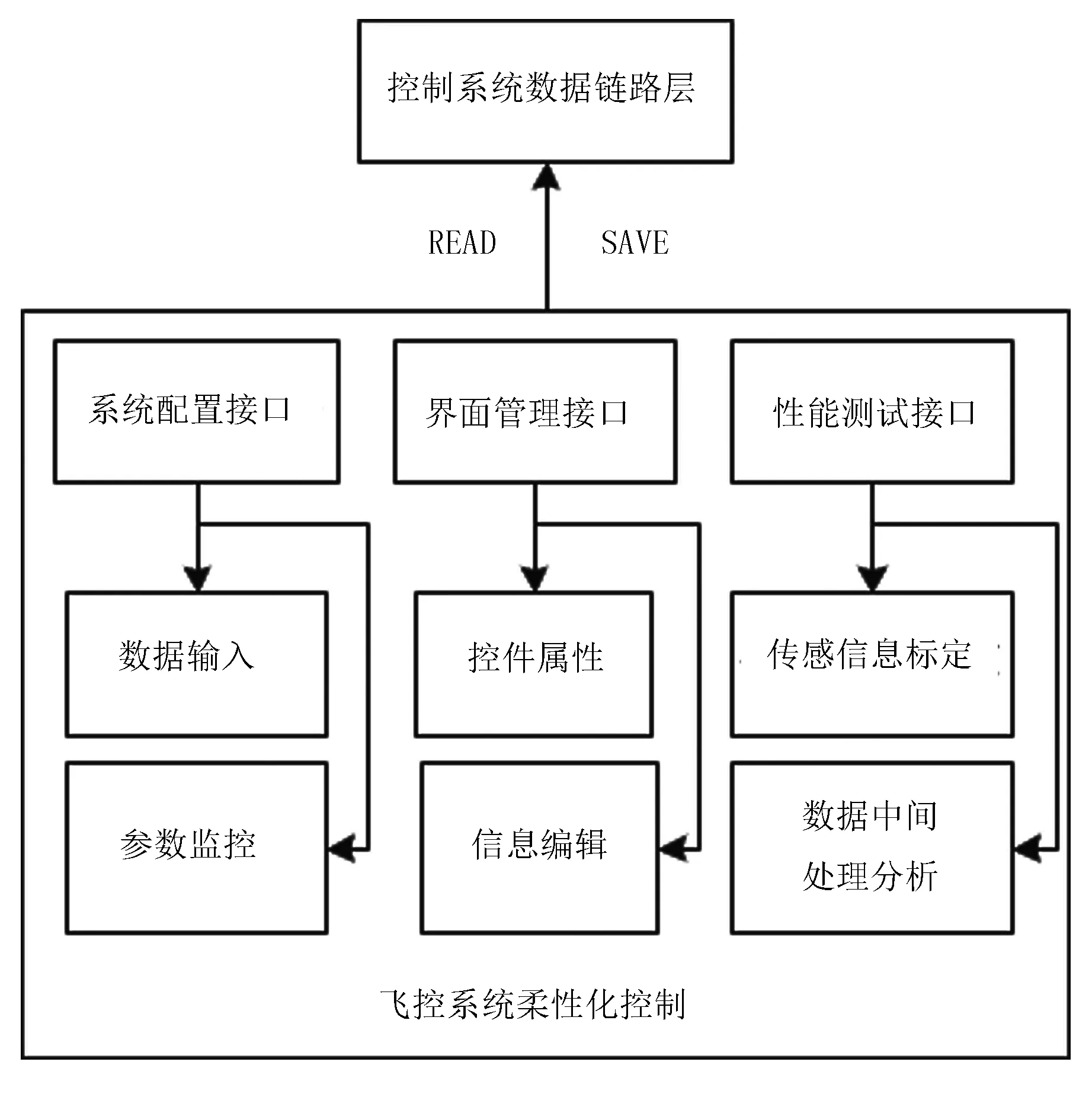
图6 植保机飞控系统软件配置功能简图Fig.6 Diagrammatic sketch of the software configuration function on the crops protection UAV control system
3 植保无人机飞控试验
3.1 条件设置
进行植保无人机飞控系统的性能稳定性及参数优化可行性试验,设置如表3所示的飞控系统主要试验参数。试验时,变化植保机作业的不同程度占空比,对比植保机的各项参数如初始位置、初始速度、惯性矩阵等变化情况,设置如下前置条件:①外界干扰系数一定;②提供源动力泵体弹模量一致;③无人机喷施管路系统运行平衡;④控制参数范围变化幅度相同等。

表3 植保无人机飞控系统试验参数Table 3 Key parameters settings of flight control system software for the crops protection UAV
3.2 过程分析
经后台监测软件提取可得到智能飞控系统性能试验的PID参数设置友好型界面,如图7所示。试验表明:结合传统的PID与核心模糊控制算法,实现了可视化的参数匹配及飞控系统位姿各参数的实时调控,如飞控系统俯仰角、翻滚角及偏航角等。

图7 植保无人机的飞控系统性能试验PID参数设置Fig.7 PID parameter settings for performance test of plant protection UAV flight control system
整机飞控系统的执行频率在7Hz、飞行速度为1.5m/s的条件下,进行数据规模化统计并处理得到如表4的试验数据。由表4可知:植保机飞控系统理论轨迹偏差与试验轨迹偏差间的误差可控制在±0.2%范围内,且在一定的占空比区间20%~60%范围内,飞控系统测试数据符合实际,随着占空比的比例增大,轨迹偏差呈现出下降趋势;试验过程整机性能具有较好的稳定度,验证了基于参数优化的飞控系统各部件执行动作的可行性。

表4 植保无人机飞控系统试验主要数据统计Table 4 Main data statistics of the flight control system test of crops protection UAV %
4 结论
1) 通过充分理解植保无人机飞控系统运行机理,确定了控制系统的主要参数,并利用植保机喷施分布与飞控参数的内在关系,考虑整机作业轨迹控制与避障动作因素,建立植保无人机作业参数精准控制算法模型。
2) 进行了植保机飞控系统硬件配置与软件调控,并融入PID与模糊控制理论结合,最大限度降低周围干扰影响程度。
3) 飞控系统性能试验得到了可视化的参数调控界面,结果表明:在频率与飞行速度一定条件下,植保机飞控系统理论轨迹偏差与试验轨迹偏差间的误差较小,占空比与轨迹误差存在负相关关系;试验过程整机系统性能运行稳定,以参数优化为切入点的思路对于植保无人机的精准调控与远程监控效率方面有较好的参考价值。
猜你喜欢
广西植保(2021年4期)2022-01-06
今日农业(2021年17期)2021-11-26
家庭影院技术(2021年3期)2021-05-21
铁道通信信号(2020年5期)2020-09-21
民用飞机设计与研究(2019年2期)2019-08-05
电子测试(2018年23期)2018-12-29
新农业(2017年2期)2017-11-06
中国公共安全(2017年7期)2017-10-13
计算机测量与控制(2017年6期)2017-07-01
新农业(2016年22期)2016-08-16
