
塔式起重机运行参数模拟方法及生成系统研究
2020-10-13 02:57郭钦朝高崇仁殷玉枫王向梅
太原科技大学学报 2020年5期
郭钦朝,高崇仁,殷玉枫,王向梅
(太原科技大学机械工程学院,太原 030024)
塔式起重机应用越来越广泛,在使用过程中,它的工作状态、频繁程度、超载违章等情况无法掌握会给塔机的使用寿命评估带来困难,也无法有效实施塔机的运行、报废制度。如今随着IT技术的发展,“黑匣子”技术已不仅应用在飞机上,也可以推广到大型建筑起重设备上,“黑匣子”对塔机各时刻运行状态下的各参数进行实时记录,但目前普遍缺乏强有力的数据分析软件的配合,难以对数据进行具体分析[1-3]。为了解决数据分析软件研发过程中数据来源的问题,本文提供了塔式起重机运行参数模拟生成的理论方法及软件的编程思路。所述模拟生成的理论方法为依据文献[4-8]中的公式、标准来模拟塔机动作过程中各参数的变化规律。通过LABVIEW软件中循环结构、平铺式顺序结构来对理论部分进行编程实现塔机运行参数数据模拟快速生成。本文所述成果表现为一种数据模拟快速生成软件。可实现模拟速率为实际采集速率10倍的自动数据生成,能进行access或Excel的保存,生成一系列符合塔机运行规律的数据,解决了数据来源的问题,能够及时的对塔机“黑匣子”进行下一步的数据分析软件研发。本研究在塔机运行参数数据模拟方面实现了理论与软件的结合,对塔机“黑匣子”体制的完善与塔机寿命的评估有一定的推动作用。
1 塔式起重机运行参数模拟的方法
1.1 塔式起重机运行各参数
本文中塔式起重机运行各参数包括:运行时刻、起重量、起升高度、变幅位置、回转角度、风速、风向。起重量:钢丝绳所受的拉力;起升高度:起吊重物到臂架的垂直距离;变幅位置:动作小车距离回转中心的距离;回转角度:在回转平面内臂架与初始零点所成的角度。
1.2 塔式起重机运行过程及子过程划分
本文中涉及塔式起重机的四个动作过程:起升过程、回转过程、变幅过程、降落过程。起升:起升拉紧过程、拉紧振动过程、起升加速过程、起升匀速过程、起升减速过程;变幅:变幅加速过程、变幅匀速过程、变幅减速过程。回转:回转加速 过程、回转匀速过程、回转减速过程。降落:降落加速过程、降落匀速过程、降落减速过程、降落放松过程。
表1揭示了塔机部分运行参数与动作过程的关系。

表1 模拟中的塔机动作示意图Tab.1 Tower crane action in simulation
1.3 塔式起重机运行变速过程模拟方法
本文中涉及的所有变速过程,可依据表2进行模拟的选定,我们选定运行速度1m/s,使用中高速的运行设备,即加速时间4 s,加速度0.25 m/s2.其中起升速度变化示意图[9]如图1:

表2 起升加速时间与加速度值Tab.2 time and acceleration
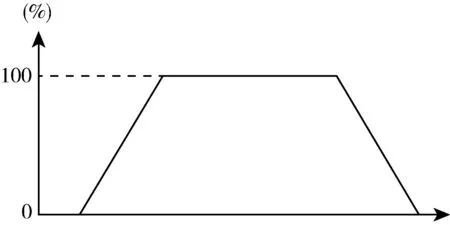
图1 起升速度曲线Fig.1 Lifting speed curve
1.4 塔式起重机运行风速、风向过程模拟方法
本文中所述塔机运行参数中风速的模拟方法为运用LABVIEW中的循环结构在每10个单起吊周期中产生5以内的随机数进行模拟。本文中所述塔机运行参数中风向的模拟方法为运用LABVIEW中的循环结构在每个单周期中产生一个360°范围内的随机数。
1.5 塔式起重机运行过程中起重量的模拟方法
本文主要对起重量模拟的方法进行研究。模拟中拉紧、放松过程中起重量的模拟:由文献[9]给出的起升绳拉力,依据如图2所示。

图2 起升绳拉力Fig.2 lifting rope tension
起升时钢丝绳在时刻间隔为3 s时拉紧,起重量增加迅速,可选定一个拟合度较高的函数W进行模拟:
W=10t+d
(1)
式中:t表示时刻间隔,t=1 s、2 s、3 s,d表示0至1的随机数。
模拟振动过程由起升动载曲线,如图3.

图3 起升动载受力曲线Fig.3 lifting dynamic load curve
可知振动有一定的简谐性,以如下函数表示振动的简谐性:
X=sint/t
(2)
此过程起重量的第一部分起重量的基础上增加一个Y:
(3)
式中:t表示时刻间隔,t=1 s、2 s、3 s,PQ表示起重机的起升载荷,φ2表示起升动载系数;C表示该过程前一个过程的最终起重量; 变幅加速过程中,起升绳最大摆角,示意图见图4.
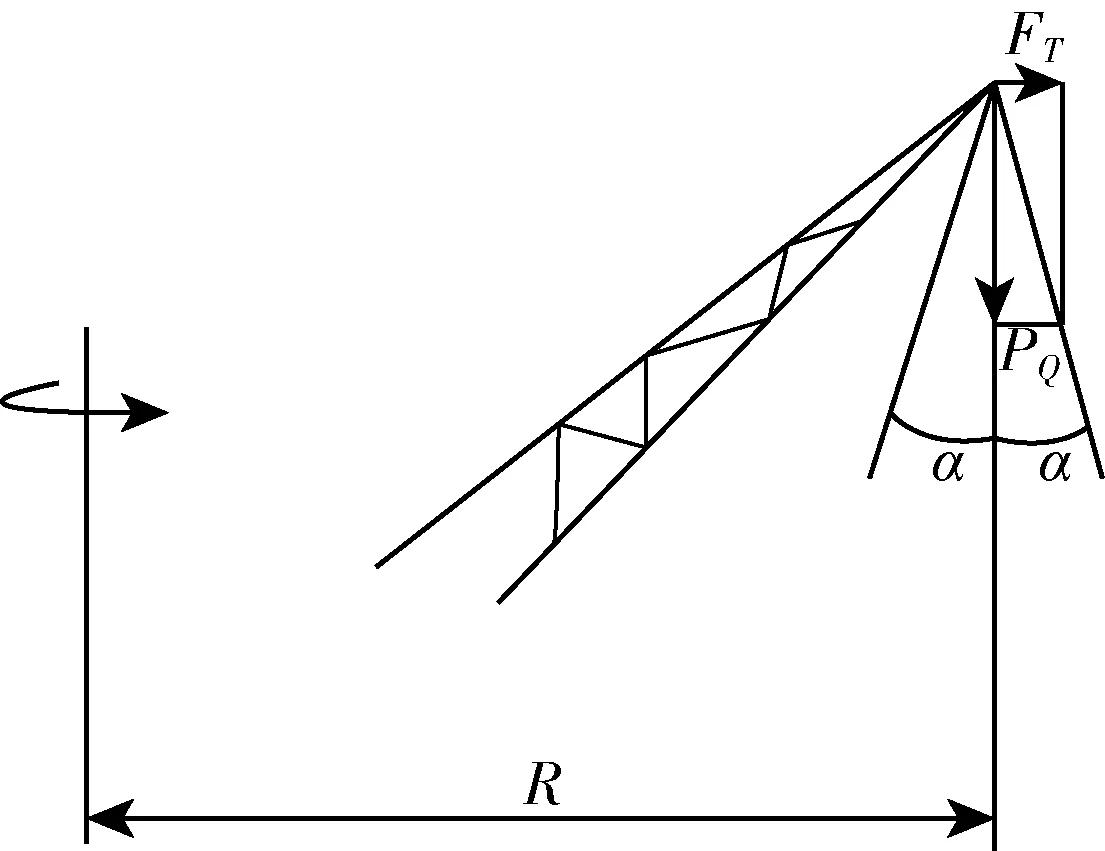
图4 起重机回转、变幅起升绳的偏摆角Fig.4 Deflection angle of crane slewing and variable amplitude hoisting rope
在塔机平面(起升高度与变幅位置组成的平面)会有一个最大吊重摆角,根据文献[4-8]起重量的模拟按FL变化:
(4)
式中:PQ为起升物品吊重,α根据表3选取为12°;

表3 起重钢丝绳最大摆角Tab.3 Maximum swing angle of hoisting wire rop
回转过程类比于变幅过程,其中吊重摆角最大变化为18°.
2 塔式起重机运行参数生成系统
基于LABVEIW对塔式起重机运行参数生成方法进行编程。LABVEIW作为一种编程语言—G语言,即图形化语言,G语言简单易学,通过一些图形控件连接进行编程[10]。本文中模拟塔机运行参数生成系统是依据所述塔式起重机运行参数模拟生成的方法通过LABVIEW中的循环结构内嵌平铺式顺序结构实现的,平铺式顺序结构具有自左到右同步有序执行的特点,包括一个或多个顺序执行的子程序框图,每个子程序框图都包含塔机四个运行过程的各个子过程的图形化程序,可模拟出塔机单起吊周期的运行参数,塔机运行时,经起升、变幅、回转、降落的过程为一单起吊周期;利用循环结构可实现塔机运行参数多起吊周期的模拟。为了防止数据发生泄露,利用LABVEIW时间等待控件来实现每0.1 s产生一组相邻时刻的数据,模拟速率为实际数据采集的十倍。本章节主要介绍塔式起重机运行过程中的几个过程的程序框图,包括:起升拉紧过程、起升振动过程、起升匀速过程、变幅加速过程(回转加速过程类比于变幅加速过程),塔机其它各个运行过程可类比于所述过程。根据上述塔式起重机运行参数模拟方法结合LABVEIW编程,各个运行过程的具体程序框图如图5-图8(即平铺式顺序结构各个部分)。

图5 起升拉紧过程程序框图Fig.5 Block diagram of the hoisting and tensioning process

图6 起升振动过程程序框图Fig.6 Block diagram of the lifting vibration process
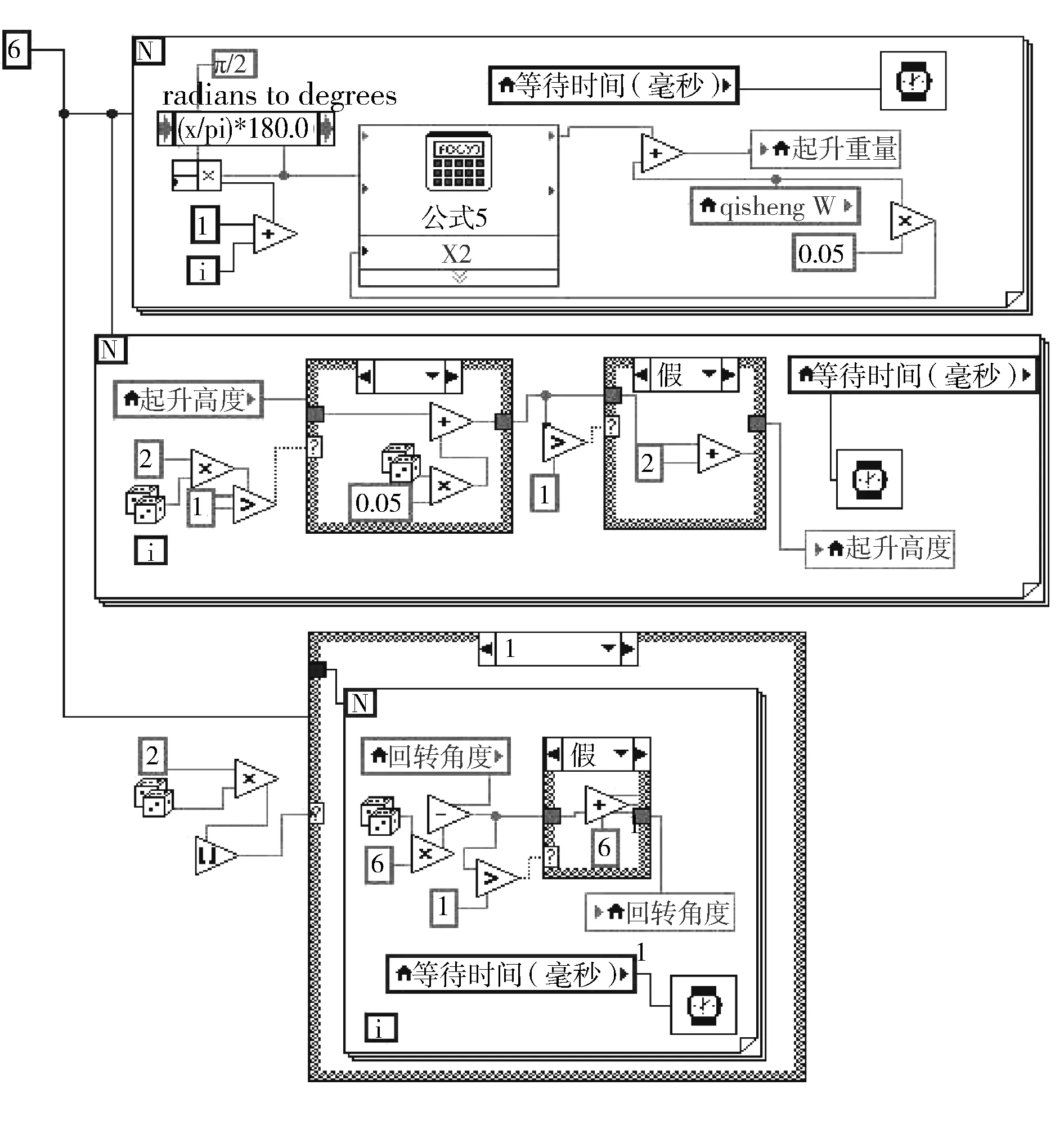
图7 变幅加速过程程序框图Fig.7 Block diagram of variable amplitude acceleration process
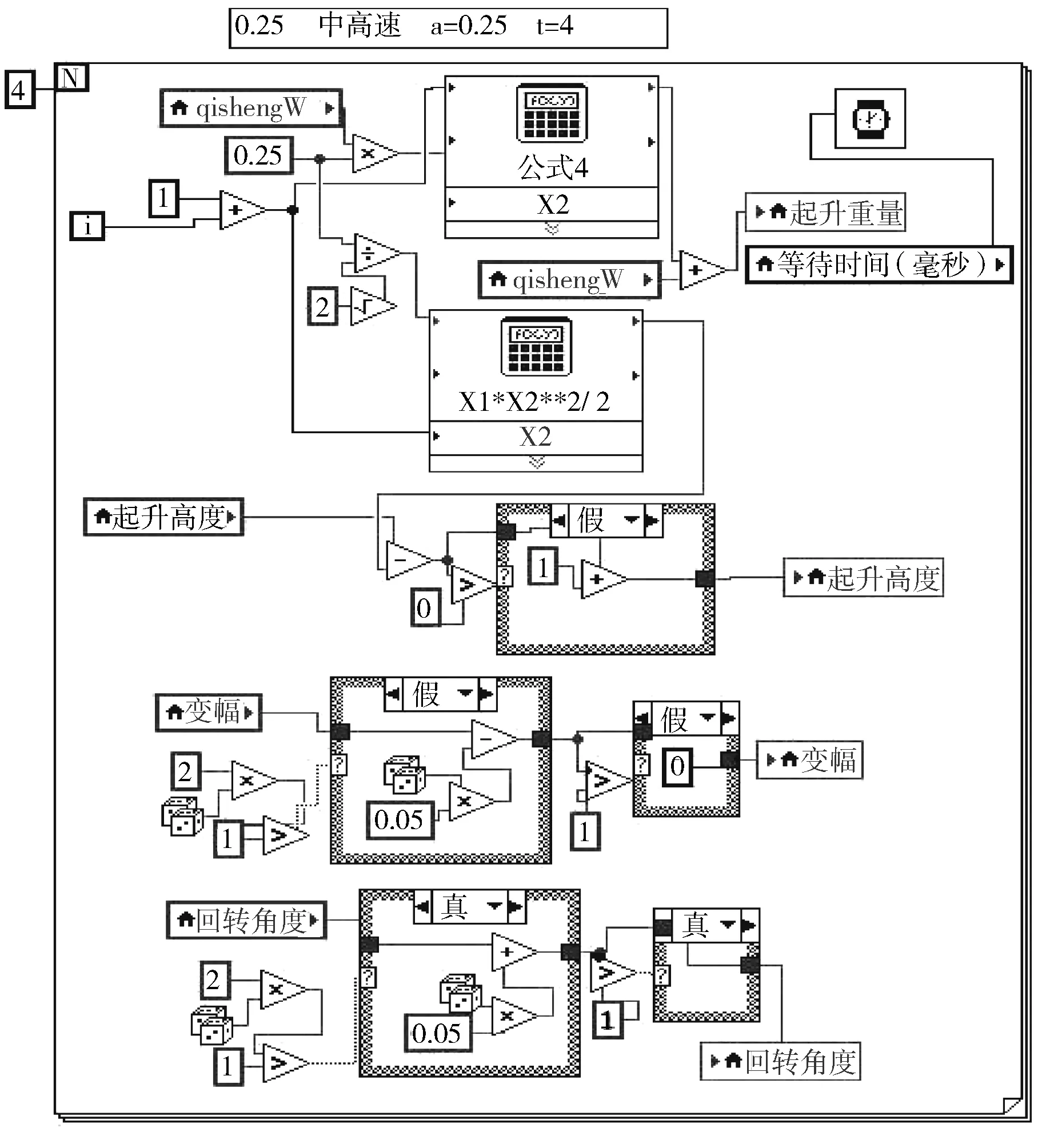
图8 起升匀速过程程序框图Fig.8 Block diagram of hoisting constant speed process
3 结论
本文主要介绍关于模拟塔机“黑匣子”所采集参数(塔机运行参数)的数值。现实中,塔机“黑匣子”普遍缺乏对数据的分析、处理机制,由于数据源缺乏的问题,未能及时研发并完善塔机“黑匣子”机制。就数据短缺问题本文提出了对其进行数据模拟的方法和系统,最终快速模拟出塔机“黑匣子”所记录的各参数值。解决了由于数据源问题而不能及时对塔机“黑匣子”进行数据分析、处理的问题。
本文依据所述塔机动作相关原理将塔机动作过程相应的理论知识结合LABVIEW编程来模拟快速生成符合塔机运行参数的值,实现数据从理论到自动生成。成果表现为一种自动快速生成类似于塔机“黑匣子”所记录的各参数值的软件,有益于塔机“黑匣子”数据分析、处理机制的研发与完善。数据以EXCEL或ACCESS的形式保存,其可视化窗口、数据模拟成果、各运行参数数据变化曲线如图9-图12所示。

图9 塔机运行参数生成系统界面Fig.9 System interface of tower machine operation parameters generation

图10 模拟生成塔式起重机各参数数据Fig.10 Simulation to generate the tower crane parameters data
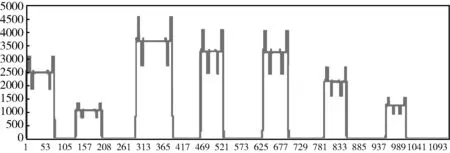
图11 起重量变化曲线Fig.11 lifting weight curve

图12 起升、变幅、回转变化曲线Fig.12 Rising,changing amplitude and turning curve
猜你喜欢
施工技术(中英文)(2022年21期)2022-12-12
科技视界(2022年16期)2022-07-12
中国特种设备安全(2022年3期)2022-07-08
城市建筑空间(2022年4期)2022-05-20
农业装备与车辆工程(2021年10期)2021-11-03
中学生数理化·高一版(2021年1期)2021-03-19
农业装备与车辆工程(2021年2期)2021-02-27
科技视界(2020年24期)2020-07-12
北京航空航天大学学报(2019年8期)2019-09-10
中学生数理化·高一版(2019年1期)2019-06-26
