南海海区航标遥测遥控系统完善与优化
2020-07-23 12:49桑凌志洪四雄
中国航海 2020年2期
桑凌志, 洪四雄
(1.中国交通通信信息中心, 北京 100011;2.交通运输部南海航海保障中心, 广州 510235)
航标是重要的航运基础设施,对保障船舶航行安全、宣誓国家海域主权有着极其重要的意义。遥测遥控系统是利用航标通信实现远距离测量、控制和监视的系统,由监控中心、数据采集终端和通信系统组成。[1]遥测遥控系统可使航标主管部门远程、快捷地确定航标故障,发布航标信息[2],进而提高航标工作的稳定性,提高航标管理的效率和效能,降低维护成本,为船舶航行安全提供可靠的保障。
航标遥测监控系统在美国、日本和加拿大等国均已得到成功应用,国际航标协会(The International Association of Marine Aids to Navigation and Lighthouse Authorities, IALA)曾就数据标准和通信链路推荐过技术讨论意见。[3]我国的航标遥测监控系统开发建设在20世纪90年代中期得到了快速发展,经过前期探索和全面应用之后,2010年交通运输行业标准《航标遥测遥控系统技术规范》[1]对该系统的组成、功能、技术要求、试验方法和检验规则作出了规定,航标遥测遥控开始规范化发展,系统品质得到进一步提升。
在航标遥测遥控系统的功能、组成和技术实现等规范化建设方面,很多学者对数据采集、数据控制、数据传输和数据处理等方面进行深入分析,并在上海[4]、烟台[5]、大连[6]、长江航道[7]和黑龙江[8]等水域进行系统开发与应用。例如:李国祥等[9]结合长江航道数字化建设情况,提出系统应实现基础数据库互通,进行标准化建设;陈宏等[10]、高岩松等[11]和李子富等[12]认为需丰富系统功能,通过数据统计与分析,面向需求输出相关结果,为实际工作提供支持;刘均辉[13]根据厦门的情况,将无线视频引入遥测遥控系统;宋成果等[14]等设计集成溢油、水文和气象传感器的多功能航标系统,以提高船舶的安全性。对于航标终端本身的可靠性和终端多核系统软件的远程升级也有学者[15-16]进行了研究。例如:文献[17]和文献[18]针对终端定位精度、浮标位置漂移和撞击分析等关键问题开展研究,取得了相应成果。在经历建设期之后,航标遥测遥控系统建设在2010年得到规范,但各水域系统因通信和数据等标准不同,体现出的问题逐步显现,系统发展进入瓶颈,亟需面向业务进一步完善和优化。
南中国海是我国与世界各地联系的重要海上通道,在政治、军事安全和经济发展等领域具有极其重要的战略价值。有效监测南海海域航标的运行状态,面向业务需求开发南海海域航标遥测遥控系统,可有效保障南海海域船舶的安全航行,更好地服务国家南海战略,促进中国和东盟的发展,助力交通强国建设,践行“一带一路”倡议。本文面向南海海域区航标遥测遥控系统,对数据准确、终端在线、监测预警、资产管理和系统平台等5个方面的问题进行分析,完善系统功能,经完善优化的系统已经在南海海域全面使用并发挥重要作用。
1 南海海域航标遥测遥控系统存在问题
1.1 航标运行环境
将南海海域的航标运行环境分为工作环境、电器环境和无线电通信环境,对航标正常工作的适应性需求进行分析。
1.1.1工作环境
由于南海海域纬度相对较低,航标灯器的工作温度较高,夏天甚至可达70 ℃;同时,由于灯器工作环境的相对湿度较高,灯器内的相对湿度过大,灯器会出现短路等故障;阳光的光照强弱决定着灯器在夜晚自动开启光照工作,在白天自动关闭光照工作。因此,需准确监测环境温度、灯器内相对湿度和光照强度等外部工作环境信息。
1.1.2电器环境
为保证灯器正常工作,需要太阳能板、蓄电池和发光控制模块等设备的支持。因此,航标灯器在电器环境方面,需实现对灯器工作电压、电流,太阳能充电电压、电流,蓄电池放点电压、电流等参数的有效监测,以帮助判断灯器、蓄电池和太阳能板等设备的工作状态。
1.1.3无线电通信环境
南海海域航标的布设水域可分为港区水域、近岸偏远水域、远海岛礁水域等3种典型水域。绝大部分航标分布在港区水域,公共网络覆盖较好,但信号不稳定的趋势日益突显;部分航标布设在离城区和港区偏远的近岸水域,这类水域的电信基础投入不足,基础公共网络覆盖效果较差。我国近年在南海海域的远海岛礁水域建设了必要的灯塔等基础性航海保障设施,但其没有基础公共网络条件。因此,需通过航标遥测遥控系统建设,解决全水域航标的实时监测问题;需对必要的监测数据进行准确、实时的监测,实现准确预警,保证航标能正常发挥其助导航功能,进而保障航行安全。
1.2 系统主要问题
现阶段南海海域的航标遥测遥控系统使用广泛,各管理部门都建立有应用系统,但对业务的支撑能力严重不足,主要存在以下5个问题。[19-20]
1) 数据准确方面,终端的传输数据欠缺有效规范,数据的准确性得不到保证,导致航标遥测数据难以被进一步准确利用。
2) 终端在线方面,部分航标所在水域无基础公共网络覆盖,缺乏有效的无线电通信方式,覆盖范围有限。为保证时效,终端往往选择与服务器的长连接通信,但通信数据较少,通信基站会关闭这些闲置连接以优化网络,进而导致终端掉线。终端会频繁挤占连接,形成掉线的恶劣循环。
3) 监测预警方面,现阶段的报警信息是终端通过自主判断得到的,但终端的计算能力严重不足,报警有效性低,导致基层人员难以有效使用系统。
4) 资产管理方面,由于缺少有效的管理方式,维护人员无法准确记录航标与终端、终端与SIM(Subscriber Identity Module)卡之间的关系,不清楚航标、终端和SIM卡的具体使用情况。同时,为保证通信,大量混乱的SIM卡持续缴费,严重浪费资源。
5) 系统平台方面,南海海域开发了统一的遥测遥控系统,但系统功能单一,且终端接入数量不足;部分终端厂家提供的系统仍在使用,数据无法互联互通,信息孤岛严重;厂家提供的系统平台是终端硬件产品的免费配套,系统简单,无法满足工作需要。因此,系统平台使用效率极低。
2 系统完善与优化
2.1 系统功能完善
2.1.1海图平台功能完善
(1) 海图平台展示。在基础电子海图平台上对各类物标进行直观展示,包括航标展示、管理机构展示、船舶自动识别系统(Automatic Identification System,AIS)和差分定位系统(Differential Global Positioning System,DGPS)等各类基站的展示。
(2) 海图标绘。需在海图上对各类航标、管理机构和基站进行自定义的标绘。
2.1.2航标运行监测功能完善
(1) 航标、终端和通信号码绑定。针对使用中的航标遥测遥控终端,需实现航标编号、终端编号和通信号码三者之间的两两自动绑定,准确记录航标、终端和通信号码的具体使用情况。
(2) 航标运行状态数据显示。系统能读取航标终端上报的最新航标遥测数据,并能通过数字、图形等形式展示。
(3) 遥测遥控指令发送和记录查询。平台发送相应遥测或遥控指令,终端及时应答并上报相应数据,指令发送和接收记录可显示并查询。
(4) 后台监测门限设置。设置相应的报警门限,包括航标后台监测门限和系统后台监测门限两部分。
(5) 故障展示与处理。按辖区显示记录存在的航标故障情况,通过数字记录航标未处理故障数量;提供故障处理通道,便于现场维护。
(6) 历史数据查询。按时间、类别等查询系统各类数据的历史信息。
(7) 航标报表。利用航标状态的历史数据生成辖区内航标的24 h报表。
(8) 航标碰撞追踪。根据航标碰撞报警时间,利用AIS数据搜索途经船舶,协助锁定肇事船舶。
(9) 厂商准入管理。只有经过测试予以准入的航标厂商灯器才能接入平台并显示。
2.1.3业务统计报表功能完善
(1) 航标运行历史状态。根据时间段查询航标电流、电压等数据,通过图表显示航标的运行状态。
(2) 遥测遥控终端统计。对航标遥测遥控终端的生产厂家、类型和通信方式等进行统计,生成相应的统计数据表和对比表。
(3) 航标运行故障统计。既可按照不同的故障名称进行统计并生成报表,也可按航标故障种类、等级和区域等属性进行热力图显示,帮助分析险情规律。
(4) 航标故障处置统计。根据不同的故障类型对不同部门的故障处理信息进行统计并生成报表,形成故障分析报告。
2.2 前端通信方案优化
优化设计南海海域航标遥测遥控系统与终端的通信方案,满足系统在数据准确、终端在线方面的需求。
2.2.1通信信道
在原通用分组无线服务技术(General Packet Radio Service,GPRS)的基础上,增加各类适用的移动公共网络(如GPRS、CDMA、3G和4G等)和移动卫星网络,以及AIS、北斗卫星无线电定位系统(Radio Determination Satelite System, RDSS)等专用网络,实际使用时需根据各网络的应用特点选择相应的终端,保证遥测遥控系统对航标监测的全面覆盖。
2.2.2标-岸交互方式
原方案的交互方式包括终端主动上报、服务器指令下发两种,交互简单,不能满足实际需求。新方案将服务器与终端之间的交互模式重新分为服务器查询终端运行状态信息、服务器设置终端运行状态信息、终端主动上报运行状态报警信息和终端上传状态参数数据等4类。由于状态参数又进行4个分级处理,终端上传状态参数数据有4个分级,因此实际交互方式有7种。
2.2.3数据分类分级
新方案将交互数据分为基础报文信息、工作状态信息、灯器设备信息、能源设备信息、雷达应答器信息、终端报警信息和工作参数信息等7类。基础报文信息包括报文交互模式、终端信息、数据采集时间和报文属性等。其他6类信息按回传频次需求,从高到低分为4个级别,其中:第一级状态参数是需要频繁上报的数据;第四级状态参数是静态信息,仅根据遥测指令回传。
2.2.4报文长度控制
新方案在数据分类分级的基础上对报文进行积木式处理,最大程度地精简报文。保证在任何通信方式下,一级状态参数的数据都能用一条报文传输;在回传全部一级、二级和三级非静态参数信息时,都能用两条连续报文传输。
2.2.5数据准确性
新方案在对每个数据项的单位、值域、误差和比特数进行规定,保证数据传输的准确性。例如:规定经纬度单位“度”的值域为0~89,单位为(°);“分”的值域为0~599 999,单位为1/600 000°;“电压”的值域为0~6 500,单位为0.1 V,数据误差为±0.1 V。解决第1.2节中的问题1。
2.2.6网络通信连接
原方案为保证时效,选择TCP(Transmission Control Protocol)长连接通信,实际上网络连接上的通信数据不多,通信基站在必要时会关闭这些连接,以提高网络利用率,终端会频繁占用连接,以提高在线率,造成恶劣循环。新方案在采用移动公共网络通信时,优先选择TCP短连接,充分保障每次标—岸通信过程中,信道连接稳定有效。解决第1.2节中的问题2。
2.3 后端终端运行故障判断方法优化
将系统后端中终端运行故障来源分为终端主动上报和系统后台运算判断两类,分别解决监测预警方面的需求,即解决第1.2节中的问题3。
1) 由终端主动上报运行状态报警信息,主要负责时效性要求高的故障,如航标碰撞和简单逻辑判断可得到的故障,包括灯质错误、白天灯亮、晚上灯灭、发电机油位不足和市电停电等。
2) 系统根据终端状态数据,通过系统的后台运算判断得到故障,如航标移位、终端数据丢失、工作环境异常、各类电压和电流异常、终端在线率低、终端老化和终端链路可靠度低等。
2.3.1基于力学分析的航标位移判断
对于现阶段的航标位置判断,首先设定航标漂移距离阈值l0,然后根据终端定位芯片位置与航标设计位置的距离计算漂移距离l,最后通过比较l0与l的大小进行判断。但是,航标漂移距离阈值l0的设定主要以经验为主,水流速大的区域取150~200 m,水流速小的区域取50~100 m,没有准确的取值依据。因此,需采用力学分析的方法准确估算航标的理论最大漂移距离L,将航标漂移距离阈值l0的设定控制在L以内,以更好地判断航标的位移情况。
设浮筒重量为m浮,浮筒半径为r浮。设有N节重量为m0的单环锚链,链头外径为r2,内径为r1,连接部分长为l,其中不沉底锚链有n节。
单环锚链的浮力力F单为

(1)
浮筒浮力F浮为

(2)
将浮筒与不沉底锚链作为一个整体进行分析,则纵向上的浮力与重力相等,即
F浮+nF单=(m浮+n·m0)g
(3)
将式(1)和式(2)代入式(3),可得到浮筒沉没深度h浮为

(4)
第n节锚链需满足
n=min[(F浮-m浮g)-(i-1)(m浮g-F单)]
i=1,2,…,n
(5)
(F浮-m浮g)-(i-1)(m浮g-F单)≥0,
i=1,2,…,n
(6)
利用式(6)可求得不沉底锚链数量n的值。
设水流速度为v,则在时间t内水流移动距离为vt。设第i节不沉底锚链的水平夹角为θi,浮筒受水流作用的纵向投影面积为S=2r浮·h浮,锚链受水流作用的纵向投影面积S0为
S0=2l·(r2-r1)·sinθi+π·2r2·2r2sinθi-
π·2r1·2r1sinθi)=2l·(r2-r1)·sinθi+
(7)
根据动量定理mv=Ft,浮筒与锚链所受海水推力F推浮和F推链分别为
(8)
(9)
分别对浮筒和第1节锚链进行力学分析,结果见图1。
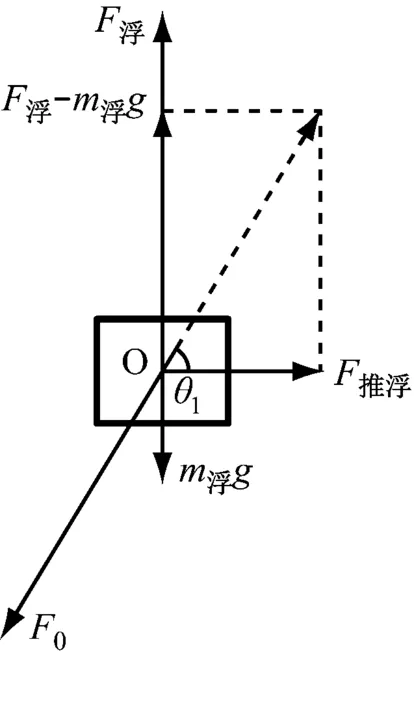
a) 浮筒受力分析

b) 第1节锚链受力分析
(10)
由式(10)可得到第1节锚链的水平方向夹角为
(11)
(12)
由式(11)得到第2节锚链的水平方向夹角θ2为
(13)
由式(13)可得第i节不沉底锚链的水平夹角θi为
(14)
最大漂移距离L为N-n节沉底锚链的总长,加上不沉底锚链的横向投影距离之后,可得
(15)
设定的漂移距离阈值l0应满足l0≤L。
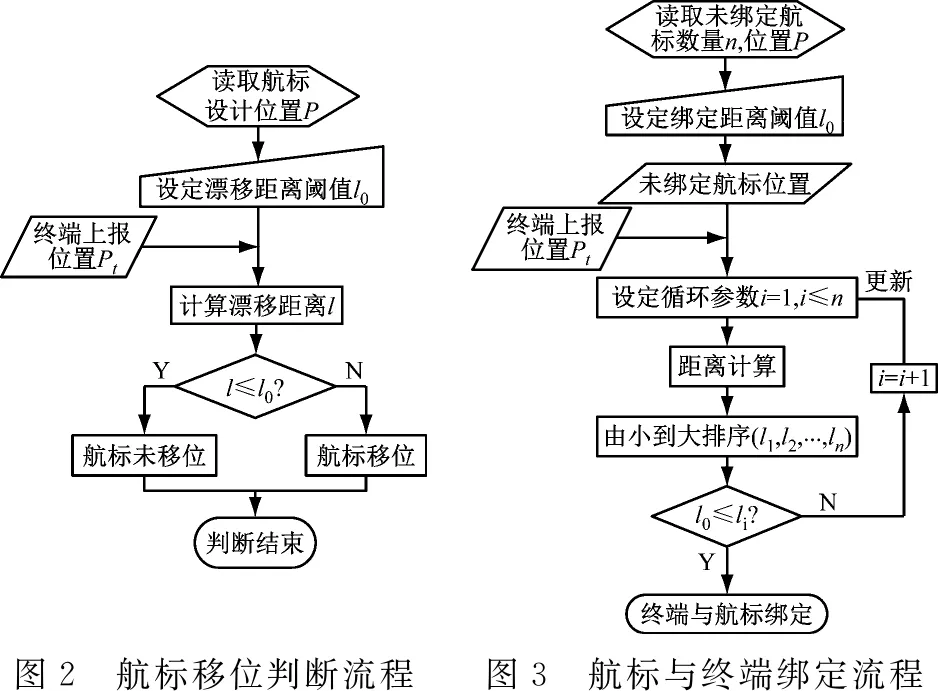
在航标的设计位置P的基础上,利用终端实时上报位置Pt,则可计算得到实际漂移距离l。通过将实际漂移距离l与设定的漂移距离阈值l0相比对,可对航标移位进行判断。航标移位的后台判断流程见图2。
2.3.2航标、终端、卡号的自动识别与绑定
利用终端上报的位置和航标的设计位置进行距离比对,实现航标与终端的自动识别和绑定;在通信方案中设计卡号不匹配报警,实现终端与卡号之间的自动识别和绑定,以满足资产管理方面的需求,即解决第1.2节中的问题4)。
2.3.2.1 航标与终端的自动识别与绑定
终端上报位置后,根据未绑定航标设计位置得到终端与设计位置的距离,根据距离实现后台对航标与终端的自动识别和绑定。具体流程见图3。
2.3.2.2 终端与卡号自动识别与绑定
利用终端读取SIM卡号的国际移动用户识别码(International Mobile Subscriber Identification Number, IMSI),若与记录不一致,则利用短消息发送卡号不匹配报警至系统短信平台,利用短消息识别SIM卡号,实现终端与卡号自动识别和绑定。具体流程见图4。

图4 终端与卡号绑定流程
2.4 系统后端数据处理模块
系统后端数据由数据接入模块、数据分析模块和数据决策模块分别处理(见图5)。

图5 系统数据处理模块
1) 数据接入模块根据外部的航标静态信息基础数据库和航标遥测信息获得航标各类基础数据。
2) 根据实际数据情况,数据分析模块对航标终端运行情况进行分析。
3) 根据数据分析结果,结合航标上报的预警信息,数据决策模块对各类状态报警情况进行判断,对外提供航标资产管理和动态维护方面的决策支持,提供航海保障服务支持。同时,数据接入模块和数据决策模块的数据构成航标运行状态基础数据库。通过进一步优化数据处理模块,解决第1.2节中的问题5。
南海海域航标遥测遥控系统经优化与完善后,在南海海域全面使用。优化之前南海海域内最少有6套不同的航标遥测遥控系统对约1 200座航标进行监测,使用效率低下。优化完善后,实现了利用1套系统对南海海域89.1%航标进行有效监测,全面覆盖了中越边境水域航标和西、南沙水域航标。
3 结束语
遥测遥控系统在船舶航行安全保障方面具有重要作用,在《航标遥测遥控系统技术规范》实施后得到了快速发展,但因通信、数据等标准不同,进入了瓶颈期。南海海域的航标遥测遥控在数据准确、终端在线、监测预警、资产管理和系统平台方面存在一定的问题。
本文根据这些问题和需求,对南海海域航标遥测遥控系统的功能进行了分析完善。对系统与终端的通信方案进行优化设计,满足系统在数据准确和终端在线方面的需求。利用力学分析的方法,准确估算航标的理论最大漂移距离,帮助控制航标漂移距离阈值的设定值,以更好地判断航标的位移情况。实现航标与终端的自动识别与绑定和终端与卡号之间的自动识别与绑定,以解决资产管理方面的需求。对系统后端数据处理模块进行优化,解决数据孤岛问题,实现功能的丰富和统一。优化完善后的系统已在南海海域全面使用,建设覆盖率达到89.1%,实现了对中越边境水域和西、南沙水域航标的全覆盖,为南海海区船舶航行提供了可靠的保障。
猜你喜欢
江苏船舶(2022年4期)2022-10-10
探测与控制学报(2022年1期)2022-03-21
船海工程(2021年6期)2021-12-17
珠江水运(2021年20期)2021-12-09
珠江水运(2021年20期)2021-12-09
计算机测量与控制(2021年9期)2021-10-08
船舶标准化工程师(2020年1期)2020-06-12
计算机测量与控制(2020年3期)2020-04-07
珠江水运(2017年3期)2017-03-24