高分七号卫星激光测高仪热设计及验证
2020-07-15 09:36黄金印潘福明傅伟纯王甜甜殷亚州姜紫庆张新伟
航天器工程 2020年3期
黄金印 潘福明 傅伟纯 王甜甜 殷亚州 姜紫庆 张新伟
(1 北京空间飞行器总体设计部 空间热控技术北京市重点实验室,北京 100094) (2 北京控制工程研究所,北京 100094)(3 中国科学院上海技术物理研究所,上海 200083)
星载激光测高仪具备主动获取全球地面目标三维信息的能力,支持快速获取全球立体测绘图,同时在极地冰盖测量、植被高度及生物量估测、云高测量、海面高度测量以及全球气候监测等方面都可以发挥重要作用[1]。2003年,美国发射了世界上首颗用于探测地球表面冰层、云层和地表层高度的激光高度计一号卫星(ICESat-1)[2]。2019年11月3日,我国首颗亚米级分辨率的立体测绘卫星高分七号(GF-7)成功发射,激光测高仪为其核心载荷之一。
本文针对高分七号卫星激光测高仪任务特点、空间外热流环境、构型布局等约束,给出了基于环路热管的多热源热量传输与控温设计方案,并对地面热平衡试验和在轨飞行验证进行了总结。
1 激光测高仪热设计任务分析
激光测高仪安装在高分七号卫星上的布局如图1所示,除遮光罩从+Z方向伸出星体以外,其余部分均在载荷舱内部。激光测高仪主要分为前光机组件和后光路组件。其中,前光机组件包括主镜、主框架、次镜、次镜支撑筒等;后光路组件包括激光器、后光路电子设备和头部电子设备。
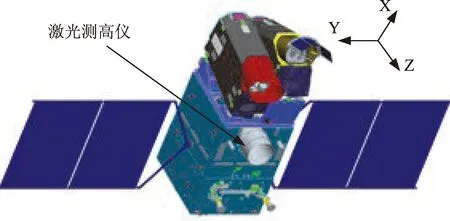
图1 激光测高仪布局图Fig.1 Layout of the laser altimeter
1.1 技术指标分析
为了实现高分七号卫星高程分辨率优于1 m的任务目标,激光测高仪主体必须具有良好的温度稳定性。一方面,激光测高仪主结构和光机组件的温度波动和温度梯度使光路系统的光学间隔发生变化,导致光学主轴偏离设计指标[3-4];另一方面,激光测高仪采用的半导体激光器是一种高功率密度的器件,对工作温度变化非常敏感,温度变化引起的微小电流将导致输出能量的显著变化和器件参数(如激射波长、噪声性能等)的变化[5]。因此,激光器测高仪主要热控指标要求见表1。

表1 激光测高仪主要热控指标Table 1 Main thermal control indicator of the laser altimeter
1.2 空间热环境分析
高分七号卫星运行在轨道高度为500 km、降交点地方时为10:30的太阳同步轨道,寿命期间β角在16°~26°之间变化。激光测高仪辐射器布置在卫星+Y侧,遮光罩和前光机组件直接暴露于空间。轨道外热流对激光测高仪热设计的影响主要体现在两个方面:一方面,同一轨道周期内,到达卫星+Y面和+Z面的外热流变化较大;另一方面,随着季节的变化,太阳光照强度和阳光与轨道面的夹角始终在变化,从而影响到达+Y面和+Z面外热流的强度。因此,激光测高仪热设计需要考虑上述外热流变化对温度稳定性的影响。
1.3 工作模式分析
根据任务需求,激光测高仪在轨工作模式分为待机模式和测量模式。测量模式每轨工作一次,每次工作20 min,总功耗172 W,其中,头部电子学设备热耗133 W,激光器热耗20 W,后光路电子设备热耗19 W。工作时间以外为待机模式,功耗均为0 W。
不同工作模式下激光测高仪热耗的巨大差异,一方面要求热控系统既能够保证工作模式下能够将热量顺利排散至星外,让激光器等工作在合适的温度水平;另一方面要求在待机模式下具有保温能力,维持设备温度的稳定性。
2 激光测高仪热设计
根据空间热环境和载荷工作模式分析结果,激光测高仪采用被动热控与主动热控相结合的设计思想。
2.1 光机结构热设计
激光测高仪遮光罩共长400 mm,分成内外两段;外遮光罩外表面喷涂SR107-ZK白漆,避免阳照区遮光罩温度过高;内遮光罩与主镜筒隔热安装,降低遮光罩温度变化对镜筒的影响;内遮光罩外表面粘贴控温加热片,再在其外表面包覆10单元多层隔热组件。
主镜筒、次镜框、次镜支撑筒等外表面包覆10~15单元多层隔热组件,降低星内其它区域温度波动对光机结构的温度的影响。
遮光罩、次镜支架、次镜框、主镜室、主镜筒等结构内部均进行发黑处理,一方面减小杂散光对成像的影响,另一方面减小光机内部元器件之间的温度梯度。
此外,为了进一步提高光机结构轴向以及周向的温度均匀性,在内遮光罩、次镜背面以及次镜框、主镜筒等组件外表面根据温度水平布置薄膜加热器,并采用高精度控温仪对加热回路通断进行控制,实现光机结构的精密控温。
2.2 激光器及后光路热设计
激光测高仪主体的发热部件(主要包括激光器、后光路电子学设备和头部电子学设备)全部集中在后光路部分,使得后光路组件单位体积内峰值热耗达到525.6 W。为了保证激光器等核心部件的温度水平、减小后光路组件温度对光机结构的影响,后光路组件采取的热控措施包括:①将光机结构与后光路组件之间进行隔热,并且将后光路组件外表面包覆10单元多层隔热组件;②激光器、后光路光学组件等温度水平要求高的部分与头部电子学设备之间进行隔热处理,减小头部电子学设备温度波动对激光器和后光路光学组件温度的影响;③采用一套基于环路热管的毛细泵驱流体回路作为主要热沉,实现后光路组件热量收集、传输以及控温。上述措施中前两点与光机结构的实施方式基本类似,以下详细介绍基于环路热管的毛细泵驱流体回路的设计与实现。
1)环路热管原理
环路热管主要由蒸发器、冷凝器、储液器、蒸气管路和液体管路等组成(见图2)。环路热管中一个完整的传热过程包括:液态工质在蒸发器中的毛细芯外表面蒸发,吸收热量,产生的气态工质经蒸气管路流向冷凝器,在冷凝器中释放热量并凝结成液体,液态工质流经储液器后,通过液体管路向蒸发器毛细芯内部供应液态工质,液态工质流经毛细芯,最后到达毛细芯表面再次受热蒸发,如此完成一个循环。

图2 环路热管示意图Fig.2 Schematic of a loop heat pipe
与轴向槽道热管相比,环路热管具有热传输距离远、传热能力大、管路布置灵活、逆重力工作能力强、单向传热以及可控温的特点[6]。因此,环路热管特别适合于将仪器设备(热源)的热耗传输至散热面(热沉)进行排散,从而实现仪器设备的温度控制。
环路热管一般用于单点热源与热沉之间的传热。为适应多热源的热量传输,戈达德航天中心(Goddard Space Flight Center)设计了一套复杂的槽道热管网络,先采用普通槽道热管将测地激光高度计系统(Geoscience Laser Altimeter System,GLAS)三台激光器的热量收集起来,再通过一套丙烯工质的环路热管传输至辐射器,其本质还是单点热源与热沉之间的传热[2]。2004年,文献[7]采用安装在环路热管毛细泵上的电加热器作为驱动热源,驱动工质在两个大面积的热源和热沉之间多次往返,最终经由热沉回到储液器,通过一套深冷环路热管实现了大面积热量收集和传递,但是该项目未对环路热管运行温度水平和稳定性进行主动控制。
2)传热链路设计
基于激光测高仪的设备布局、在轨工作模式、载荷发热及控温需求,设计了如图3所示的基于环路热管毛细泵驱流体回路系统。系统传热主要传热链路为:头部电子学设备、后光路电子学设备和激光器产生的热量分别通过槽道热管传输至毛细泵、蒸发器3、蒸发器1和蒸发器2;然后由环路热管传输至安装在卫星+Y、-Z散热面内表面的冷凝器,最终通过散热面排散至星外。
由于环路热管是整个传热链路上的核心部件,为保证热控子系统可靠度,设计了主备两套环路热管;两套环路热管状态完全一样,设计状态下仅主份工作,备份处于阻断状态。

图3 激光测高仪散热路径示意图Fig.3 Heat diffusion path ofthe laser altimeter
3)多点热源传热与控温

(1)
式中:λ为环路热管工质的气化潜热。


图4 基于环路热管的毛细泵驱流体回路原理Fig.4 Schematic of a capillary pump drive fluid loop based loop heat pipe
为了保证激光器、后光路电子学设备温度的一致性,蒸发器1入口处工质需为两相状态。因此,在冷凝器1与蒸发器1之间设置了控温加热器,通过控温加热补偿实现蒸发器1入口处工质的两相状态。补偿功率Qpre为
(2)
式中:Qsubcool为预加热器鞍座入口过冷量。
干度为x3的工质依次流过蒸发器1~3,吸收测高仪激光器和后光路电子学设备的热量后部分液态氨蒸发吸热,干度变为x4。蒸发器1~3的总吸热量为
(3)
干度为x4的工质通过热辐射器2,将激光器与后光路电子学设备产生的热量排散至空间热沉,并冷却为具有一定过冷度的液体,并经液体管路回流进入储液器和毛细泵,实现一次完整的循环。
式(1)~(3)合并可知
Qpre+QEVA1~3=Qpump·(x4-x2)+Qsubcool
(4)
假设环路热管预加热器加热功率刚好补偿预加热器鞍座入口过冷量,即蒸发器1入口工质为饱和状态(x2=x3=0)。则有
QEVA1~3=Qpump·x4
(5)
即环路热管蒸发器总吸热量等于毛细泵吸热量与蒸发器3出口干度的乘积。为了蒸发器1~3温度的稳定性,蒸发器3出口工质应该保持在气液两相状态,即x4<1。并且,x4越小,不同工作模式下激光器与后光路电子学设备温度波动越小。因此,为了确保环路热管内工质的流量满足测高仪激光器和后光路电子学设备散热的需求,同时避免因蒸发器3出口处工质干度过大而引起的温度波动,毛细泵吸收热量必需大于环路热管外回路的总吸热量。
由于激光测高仪为间歇工作模式,受其自身热容等因素影响,测量模式下头部电子学设备133 W的热量只有部分传递给环路热管蒸发器。为了确保环路热管始终稳定运行,在环路热管毛细泵上设置了辅助运行加热器。当激光测高仪不工作时,环路热管可以依靠辅助运行加热器的驱动,维持低功率运行状态;当测高仪由待机转为测量模式时,环路热管内部工质质量流量能够保证将激光器和后光路电子学设备热量完全吸收并传输至冷凝器2。
3 热设计验证
3.1 地面热平衡试验验证
为了验证激光测高仪热控设计的正确性,根据在轨外热流条件、整星温度边界和在轨工作模式,在空间环境模拟罐进行了激光测高仪正样热平衡试验。
激光测高仪正样热平衡试验过程中,激光测高仪主体以及所属热控产品均为正样状态;采用红外笼模拟遮光罩入口外热流,采用加热器模拟散热面的外热流,采用试验工装模拟整星温度边界;环路热管试验件(见图5)固定在激光测高仪背部,其中毛细泵、蒸发器1~3与其对应安装面之间填充导热硅脂,蒸发器1入口加热器鞍座隔热安装,减小管路向其安装支架的漏热。
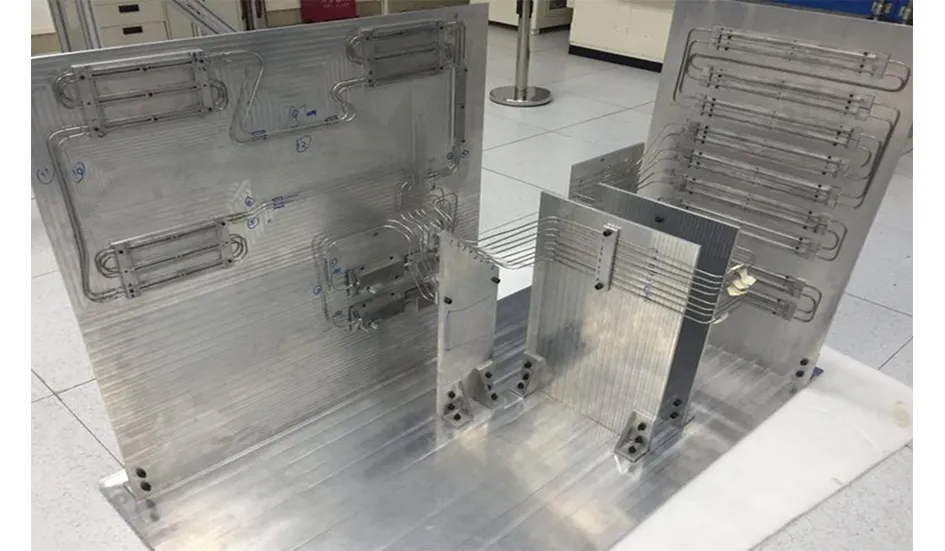
图5 激光测高仪环路热管Fig.5 Loop heat pipe for the laser altimeter
冷凝器翅片固定在散热面模拟板内表面,翅片与热沉之间填充导热硅脂;环路热管冷凝器2出口至储液器入口段管路进行隔热处理,尽可能减小环境漏热对环路热管运行的影响;环路热管其它部分及其安装支架均包覆多层隔热组件,减小环路热管与环境之间的热交换。激光测高仪热平衡试验共进行高、低温两个工况。
低温工况下,头部电子学设备、激光器和后光路电子学设备无热耗。主镜筒温度在19.3~19.5 ℃之间,次镜框温度在19.2~20.2 ℃之间,次镜温度在19.0~19.2 ℃之间,满足光机结构温度水平和稳定性要求。环路热管依靠安装在毛细泵上的辅助运行加热器维持温度运行,并通过储液器控温加热器将环路热管储液器温度水平控制在(16±0.3)℃,蒸发器1~3温度稳定在17.0~20.0 ℃,从而将后光路光学组件和激光器温度控制在20~20.7 ℃之间。
高温工况下,光机组件温度水平如图6所示。主镜筒、次镜框及次镜温度在19.2~19.6 ℃之间;环路热管蒸发器1~3温度稳定在14.8~16.7 ℃之间,头部电子学设备、激光器和后光路电子学设备峰值热耗分别为96 W、20 W和16 W;激光测高仪工作周期为95 min,每个周期工作20 min(见图7)。不同工作模式下,依靠储液器控温加热器,蒸发器1~3温度稳定在15.2~16.5 ℃。从而将激光器温度控制在19.5~20.3 ℃之间;后光路光学组件温度在21.6~22.0 ℃之间。

图6 高温工况光机组件温度分布Fig.6 Optical-mechanical component temperature in hot case
激光测高仪热平衡试验结果表明:不同工作模式及外热流环境下,激光测高仪光机组件及后光路组件温度水平及稳定度均满足设计指标要求,验证了热设计的正确性。
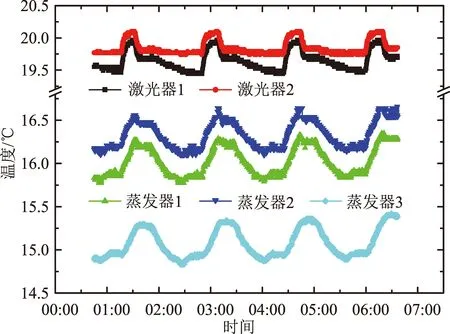
图7 高温工况激光器及环路热管温度分布Fig.7 Laser and loop heat pipe temperature in hot case
3.2 在轨飞行验证
激光测高仪在轨温度达到平衡后,主要部组件的温度随时间变化曲线如图8和图9所示。在轨飞行数据表明:主镜筒温度在19.4~20.3 ℃之间,次镜框温度在19.1~20.6 ℃之间,次镜温度在19.6~19.8 ℃之间,后光路底板温度稳定在20.2~20.8 ℃之间,满足光机组件温度水平和稳定性要求。

图8 光机组件在轨温度Fig.8 Optical-mechanical component temperature on orbit
卫星入轨后,主份环路热管工作在控温运行模式,备份环路热管处于阻断状态。在储液器控温加热回路的控制下,主份环路热管运行温度稳定在(19±1)℃,从而蒸发器1~3温度控制在17.8~19.9 ℃之间,激光器温度控制在19.8~20.4 ℃之间,满足设计指标要求。

图9 激光器及环路热管在轨温度Fig.9 Laser and loop heat pipe temperature on orbit
4 结束语
针对高分七号卫星激光测高仪的热设计任务需求,本文提出了被动热控加基于环路热管的毛细泵驱流体回路的散热方案,并通过地面热平衡试验和在轨飞行数据验证了方案的正确性。激光测高仪热设计及其验证结果表明:
(1)基于精细化热分析,合理设置遮光罩散热面、电加热回路以及多层隔热组件等热控措施,保证了激光测高仪在轨工作在良好的温度条件;尤其是次镜、激光器等关键部件,温度波动控制在±0.3 ℃以内,较好地实现了激光测高仪的精密控温。
(2)通过基于环路热管的毛细泵驱流体回路,不仅解决了激光测高仪头部电子学设备的散热问题,而且实现了激光测高仪4台激光器和后光路组件的热排散和高精度控温。此外,通过槽道热管将环路热管毛细泵与激光测高仪头部电子学设备进行传热耦合,有效地利用了电子学设备的废热,这一设计在空间复杂空间布局多点热源热量收集、传输以及高精度控温热控系统中具有很好的应用潜力。
猜你喜欢
无线互联科技(2022年4期)2022-05-11
化工进展(2022年4期)2022-04-26
制冷与空调(2022年1期)2022-03-22
客车技术与研究(2022年1期)2022-03-03
城市道桥与防洪(2022年1期)2022-02-25
汽车工程师(2021年12期)2022-01-17
河北工业大学学报(2021年4期)2021-09-23
全球定位系统(2021年3期)2021-08-07
航天返回与遥感(2021年1期)2021-03-16
科技风(2019年21期)2019-09-04