某型飞机光电雷达自检状态不截获问题分析
2020-07-04 06:27张晓明江苏金陵机械制造总厂
航空维修与工程 2020年4期
张晓明/江苏金陵机械制造总厂
0 引言
光电雷达由红外定向仪和激光测距器构成,其功能是根据空中目标的热辐射,搜索、发现和自动跟踪目标,并测量目标角坐标,测量到空中目标的距离[1]。光电雷达具有以下工作状态:用60°×10°大场的搜索扫描状态、用20°×5°小场的搜索和跟踪状态、带扫描目标指示的运行状态、不带扫描目标指示的运行状态、截获和跟踪状态、激光测距器值班状态和工作状态、自检状态。其中,自检状态是光电雷达的一项关键性能指标。
1 自检状态
自检状态是一项光电雷达在机上能够进行测试的原位检测项目,基本涵盖了光电雷达各个方面的性能指标,大致可分为6 个测试阶段。
1)在大场搜索状态下,测试内装式发射源线光源的坐标。如果光电探测器产生的信号经过视频放大组件通道放大后,满足没有连续通道故障、总故障通道数量少于5 个、30 ~35 中心通道没有故障通道,则进入下一阶段,线光源熄灭,点光源点亮。
2)在大场搜索状态下,测试内装式发射源点光源的坐标。当点光源坐标与目标指示坐标的偏离不大于±1°时,则进入下一阶段,由大场搜索状态转入小场搜索状态。
3)在小场搜索状态下,测试内装式发射源点光源的坐标。如果被跟踪目标的坐标对程序给出的目标指示坐标的偏离不大于±1°,则进入下一阶段,由大场扫描状态转入带扫描目标指示的运行状态。
4)在带扫描目标指示的运行状态下,如果角度传感器的输出端在方位和俯仰位置对程序给出的目标指示坐标的偏离不大于±40′,则进入下一阶段,由带扫描目标指示的运行状态转入截获和跟踪状态。
5)在截获和跟踪状态下形成被跟踪目标的坐标,如果被跟踪的目标对程序给出的目标指示坐标的偏离不大于±10′,形成程序中红外定向仪良好的指令,专用数字计算机中带地址260 字的第26 位置为“1”,则进入下一阶段,由截获跟踪状态转入带扫描目标指示的运行状态。
6)在带目标指示的运行状态下检查激光测距器,如果专用计算机中带地址260 字的第25 位置为“1”,专用计算机中带地址260 字的第24 位给出距离测试标记,状态为“0”和“1”跳变,则形成程序中激光测距器良好的 指令。
自检状态中,截获目标是红外定向仪良好的一个重要指标,同时也是高故障率的指标。
2 截获目标
截获目标包括两个阶段:扫描跟踪目标阶段和截获目标阶段。
2.1 扫描跟踪目标
测试内装式发射源位于整流罩中,整流罩灯座СП 灯点亮产生点光源信号,经过整流罩灯座45°反射镜,穿过整流罩透镜,经过扫描反射镜反射和腔体内部的45°固定反射镜,到达物镜组件,经过物镜组件上的调制器反射镜传输到64 元光电探测器上的光敏元件进行光电转化,形成电信号,电信号经过光电探测器前端的放大器,形成10mV的脉冲信号与噪声信号的混频信号,传输到视频放大组件,进行信号放大,同时进行滤波,滤除噪声信号,形成目标信号为1 ~15V 的脉冲信号。光路走向详见图1。
2.2 截获目标
电子部件在接收到目标信号后开始下达带扫描目标指示,调制器反射镜以25Hz的频率进行振动,形成稳定的信号,中心视频放大器组件视频放大板对从光电探测器传来的信号进行放大,形成光学状态的信号,中心视频放大组件匹配板对信号进行识别,形成∑6k 和∑64k信号,中心视频放大组件光圈控制板通过光圈传动机构调节光通量,调整信号的大小,同时传输给电子部件,电子部件下达截获指令,调制器反射镜的振动频率由25Hz 转化为100Hz,形成截获信号,光电雷达稳定截获。截获流程详见图2。
在整个截获目标过程中,不同元器件的故障将导致不同的故障现象,可以根据故障现象来分析可能发生故障的元器件,进而定位故障。

图1 光路走向图
3 不截获的问题分析
在整个截获目标过程中共出现了4种信号,4 种信号的产生有一定的先后顺序,下面对这4 种信号出现的不同现象进行分析。
3.1 无法搜索到目标信号
目标信号是一个单脉冲信号(见图3),在扫描反射镜扫描到目标时形成,由整流罩灯座СП 灯产生的光源经过光路的传输到达光电探测器,由光电探测器上的光敏元件进行光电转化,光信号转化为电信号,经过前端运算放大器放大形成目标信号。光路的偏差和信号过小都将导致无法搜索到目标。大致可分为三种类型的故障。
1)安装位置导致的光路偏差,包括整流罩灯座СП 灯的灯管角度偏差、整流罩灯座45°反射镜角度偏差、扫描反射镜角度偏差、物镜组件安装位置偏差、光电探测器位置偏差。

图2 截获流程图
2)机械位置导致光路偏差和信号过小。倾斜传动机构通过控制光电探测器与调制器的相对位置,对扫描反射镜的扫描范围进行光路补偿,如果倾斜传动机构无法正常工作,将导致扫描反射镜的扫描范围缩小和扫描目标偏差。
3)扫描到目标后,光信号需要转化为电信号,光电探测器和视频放大组件工作异常,将导致转化后的电信号过小,此类运算放大倍数过小,导致的信号过小。
以上故障排除的过程一般为:
1)检查倾斜传动机构的位置是否在零位。
2)在带扫描目标指示的运行状态下检查视频放大器组件的信号大小。
3)依次检查整流罩灯座СП 灯灯管角度、整流罩灯座45°反射镜角度、扫描反射镜角度、物镜组件安装位置、光电探测器位置。
3.2 搜索到目标信号后无法形成光学状态信号
光学状态信号是一个频率为25Hz的脉冲信号(见图4),此时扫描反射镜停在指令传输的位置,调制器产生25Hz 的驱动信号,调制器反射镜开始振荡,能够跟踪到3°×3°范围内的目标。如果存在扫描发射镜停留位置偏差、调制器反射镜无法正常振荡、调制器安装位置偏差等情况,都将导致光学状态信号不正确。大致可分为三种类型的故障。
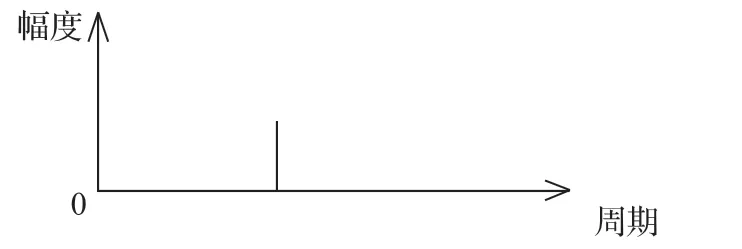
图3 目标信号

图4 光学状态信号
1)扫描反射镜是由方位、俯仰角度传感器来记录位置的,逻辑组件对角度传感器的信号进行处理,角度传感器和逻辑组件故障,角度传输不正确,将导致扫描反射镜无法停留在正确的位置。
2)调制器反射镜是通过调制器和调制器逻辑驱动电流形成器进行工作的,若调制器、调制器逻辑、电流形成器发生故障,将导致调制器反射镜无法 工作。
3)调制器反射镜振荡,能够跟踪到3°×3°范围内的目标,如果能够跟踪到的目标范围缩小,调制器反射镜光路产生偏差,将导致跟踪不到目标。
以上故障排除的过程一般为:1)测量调制器信号是否正确。
2)根据转台灯管照射到扫描反射镜上时反射光标与发射光标重合的原理,使用转台和光电雷达自身的基准镜,检查扫描反射镜角度传感器回传的角度与光学角度是否存在偏差。
3)根据校准平台灯管照射到调制器反射镜上时反射光标与发射光标重合的原理,使用调制器光学校准平台,检查物镜中调制器的位置是否存在偏 差。
3.3 光学状态的信号无法转化为∑6k 和∑64k 信号
∑6k 信号是光学状态下中心视频放大组件6 路视频放大器信号的取和,而∑64k 信号是光学状态下所有64 路视频放大器信号的取和。∑6k 和∑64k 信号通过视频放大组件的信息处理板处理,由中心视频放大组件匹配板取和形成。信息处理板故障和中心视频放大组件匹配板故障将导致这两个信号无法形成。在带扫描目标指示的运行状态下,检查∑6k 和∑64k 的信号是否形成正确,大致分为以下两种类型的故障。
1)若∑6k 信号不正确,检查中心视频放大器组件视频放大板和信息处理板。
2)若∑6k 信号正确、∑64k 信号不正确,检查周围视频放大组件的信息处理板是否正常,检查周围视频放大组件视频放大器是否正常,不正常可能导致部分信号故障,继而求和之后的信号故障。由于中心视频放大组件的匹配板是将∑6k 和∑58k 信号求和,中心视频放大组件匹配板故障将导致∑64k 信号不正确。
3.4 光学状态的信号无法转化为截获信号
截获信号是一个频率为100Hz 的脉冲信号(见图5),此时扫描反射镜停在指令的传输位置,中心视频放大组件光圈控制板根据∑6k 和∑64k 信号的大小,控制光圈传动机构,通过调整光通量来调节信号的大小,调制器产生的驱动信号由25Hz 转化为100Hz,调制器反射镜开始加速振荡,能够自动跟踪40′×40′范围的目标。如果存在光路偏差、信号干扰、调制器反射镜无法正常振荡、调制器安装位置偏差、光圈传动机构不正常工作等情况,将导致光学状态信号不正确。大致可分为以下三种类型的故障。
1)光路偏差和信号干扰。调制器产生的驱动信号由25Hz 转化为100Hz,调制器反射镜开始加速振荡,能够自动跟踪40′×40′范围的目标,能够跟踪到的目标范围进一步缩小,截获信号对光路的要求更为严格。同时,点光源信号受到的微小干扰也将导致40′×40′范围内跟踪的目标不正确。
2)调制器反射镜的不正常工作。

图5 截获信号
3)光圈传动机构的原理是,由中心视频放大组件光圈控制板根据∑6k 和∑64k 信号的大小,向光圈电流形成器输出控制信号,驱动光圈电机控制光圈的放大缩小,从而控制光通量。如果存在中心视频放大组件光圈控制板、光圈电流形成器、光圈电机方面的故障,将导致光通量过小。
以上故障排除的过程一般为:
1)测量调制器信号是否正确。
2)中心视频放大组件光圈控制板、光圈电流形成器、光圈电机的故障将导致光通量过小。
3)整流罩灯座СП 灯的灯管角度偏差、整流罩灯座45°反射镜角度偏差、扫描反射镜反射角度偏差、物镜组件安装位置偏差、光电探测器位置偏差、调制器安装位置偏差等都将导致光路 偏差。
4)整流罩灯座СП 灯的灯管膜层受损、整流罩灯座45°反射镜膜层受损、扫描反射镜膜层受损,将导致点光源信号受到干扰。
3.5 中转信号故障
电子部件是光电雷达中转信号接收处理、指令转化的重要部件,在自检状态截获目标的整个过程中的各个阶段都起到作用。电子部件通过接插件与光电雷达壳体相连,可以优先通过串件来进行故障排除。
4 结束语
光电雷达自检状态截获目标的过程是光电雷达能跟踪的目标范围不断缩小、信号源位置不断被精确锁定的过程。在这一过程中,形成阶段信号的电气元件发挥了重要作用,而随着光路的允许偏差范围不断缩小,光路的精确度也发挥着重要作用。本文通过对光电雷达自检状态截获目标的过程进行分析,从阶段信号和光路两个角度来分析故障器件,为此类故障的修理工作以及修理思路提供参考。
猜你喜欢
新能源科技(2022年9期)2022-11-20
道路交通管理(2022年2期)2022-03-11
导航定位学报(2021年3期)2021-06-19
合肥工业大学学报(自然科学版)(2020年7期)2020-08-05
空间控制技术与应用(2019年6期)2020-01-09
电子制作(2019年15期)2019-08-27
航天返回与遥感(2019年2期)2019-05-17
航天返回与遥感(2018年6期)2019-01-07
CHIP新电脑(2016年3期)2016-03-10
消费电子(2016年2期)2016-03-01