多电机机器人模糊PID控制仿真研究
2020-07-03 05:03杨小庆赵振华
中国工程机械学报 2020年3期
杨小庆,赵振华
(1.重庆工商职业学院智能制造与汽车学院,重庆400052;2.武汉工程大学电气信息学院,湖北武汉430073)
20世纪80年代,我国工业逐步开始使用自动化来完成生产任务,使机器人技术得到了迅速的发展,从而提高了企业的生产效率。机器人的应用也越来越广泛,要求也越来越多样化,机器人的研发技术也在逐步提高[1]。从机器人诞生到现在,主要经历3个阶段:①模仿型机器人。在工作时,可以将储存在内部的指令调用出来,然后编译,只能在一定精度范围内实现重复动作。②感应机器人。传感技术为机器人技术发展提供强大的动力,机器人可以通过感知系统处理声、光及图像等信息。③现代化智能机器人。机器人有多种多样的传感控制装置,可以处理多种信号,从而适应不同环境,具有自主学习功能。
随着时代的发展,机器人控制方式也在不断的变化。为了适应社会的发展,机器人采用多电机控制系统也越来越多,在传输控制系统中,要求各个电机保持协调[2]。若协调不好,不仅会影响系统的精度,还会影响到系统的稳定性。因此,多电机驱动系统协调控制精度备受关注,研究其控制精度具有重要的应用价值。
当前,机器人控制方法受到了越来越多科研人员的关注,从而产生了多种理论和方法。例如:文献[3-4]研究了机器人分数阶PID控制器,建立机器人平面简图模型,引用粒子群算法并进行改进,将改进粒子群算法用于优化传统PID控制器,通过仿真验证电机旋转阶跃响应,提高了机器人反应速度和稳定性,精度较高。文献[5-6]研究了机器人结构设计和控制方法,建立了机器人结构布局简图,分析了机器人结构动力学,采用单片机作为控制系统,推导出机器人末端执行器运动学正解和逆解,最后对控制算法进行了验证,从而提高了机器人生产效率。文献[7-8]研究了冗余驱动机器人控制系统,设计了机器人控制系统总体方案,运动平台采用PLC控制系统,通过实验验证控制系统的效果,从而提高了控制精度和响应速度。以往研究的机器人大多是单电机驱动系统,对于多电机驱动控制系统研究较少。对此,本文以三关节机器人模型简图为研究对象,给出了机器人动力学方程式,设计了机器人多电机协调控制方案。引用了传统PID控制器,通过模糊推理规则对传统PID控制器进行了改进,给出了多电机机器人模糊PID控制流程。在不同扰动环境下,采用Matlab软件对多电机机器人控制效果进行仿真验证,为进一步研究多电机机器人控制方法提供参考方法。
1 机器人多电机控制
1.1 机器人动力学
本文研究机器人为三关节连杆结构,如图1所示。
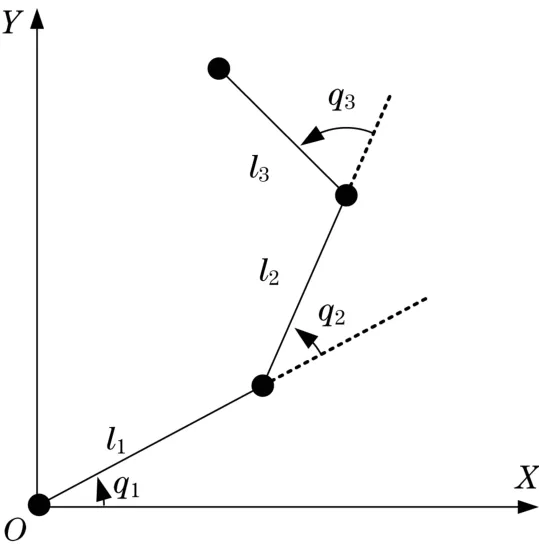
图1 三关节机器人Fig.1 Three joint robot
图1中:机器人关节连杆长度分别用l1,l2和l3表示;机器人关节角位移分别用q1,q2和q3表示。由拉格朗日定理可得,机器人动力学方程式[9]为

式中:q为机器人关节角位移向量;q'为机器人关节角速度向量;q''为机器人关节角加速度向量;M(q)为惯性矩阵;H为重力和摩擦力组成向量;C(q,q')为科里奥矩阵;u为控制力矩矩阵。
1.2 多电机控制
采用多电机控制机器人关节运动,各个电机之间是相互独立的,在控制过程中,根据输入信号要求,按照一定的比例传输给电机控制信号。关节运动的速度和位置信号反馈给电机控制器,并进行在线计算,然后传递给电机进行信号补偿,其控制流程如图2所示。

图2 机器人多电机控制流程Fig.2 Robot multi motor control process
采用多电机控制方式具有以下优点:①多电机控制方式在启动和停止两个阶段同步性能较好;②不同电机的控制不受距离的影响,符合同步控制要求;③各个电机模块相互独立,某一个电机模块出现大的扰动时,其他电机模块不受影响,能够保持正常的工作状态。
2 模糊PID控制
2.1 PID控制原理
PID控制原理是根据输入与输出之差,按照比例、积分和微分进行线性组合,对控制对象进行在线调节,其控制原理如图3所示。

图3 PID控制原理图Fig.3 PID control schematic diagram
PID控制输出误差定义为

式中:r(t)为输入信号;y(t)为输出信号。
PID控制方程式[10-11]为

式中:kp为比例系数;ki为积分系数;kd为微分系数。
2.2 模糊控制器
模糊控制器具有自适应在线调节功能,其控制结构如图4所示。
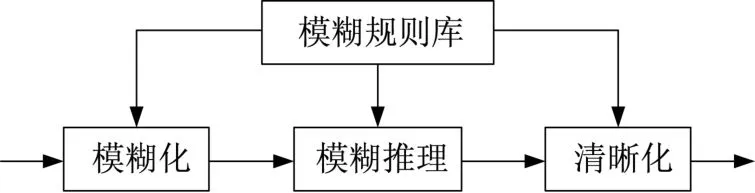
图4 模糊控制结构Fig.4 Fuzzy control structure
(1)模糊化。在确定模糊控制器后,对输入信号进行采集并且进行模糊化,共有9个区域,如图5所示。

图5 模糊区域Fig.5 Fuzzy region
通常情况下,若把区间[a,b]的精确量x转换为[-n,n]的离散量y(模糊量),则可以推导出
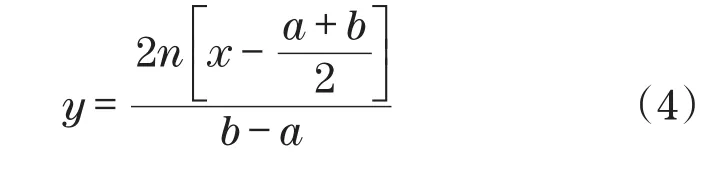
(2)模糊规则库。采用条件语句和模糊语言变量组成,通过模糊逻辑表达的控制规则,可以反映出控制专家的知识和经验,规则采用If为条件,Then为结论。
(3)模糊推理。具有类似人的推理能力,它实际上采用多重条件语句,能够表示被控制变量论域。模糊推理的目的是选择激活的模糊规则,确定输入到输出模糊集的映射[12]。
(4)清晰化。主要将被控制对象模糊推理得到的模糊量转换为实际控制精确量,主要包含两个部分:①被控制对象通过反模糊化转换为精确量;②精确量变换成为实际控制量。
模糊PID控制器通过在线反馈偏差e和偏差变化率ec进行调整,可以达到不同时刻控制对象对偏差e和偏差变化率ec的要求。采用模糊理论对PID控制进行在线调节,形成自整定模糊PID控制器,其控制流程如图6所示。
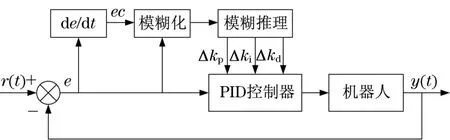
图6 机器人模糊PID控制流程Fig.6 Robot fuzzy PID control process
模糊PID控制过程如下:根据偏差e和偏差变化率ec反馈信息,调整PID控制参数,使控制参数达到最优值[13-14]。在控制系统运行过程中,不断检测e和ec,然后对kp,ki和kd进行在线校正,从而满足机器人控制的动态性能要求。由于微分环节调节难度较大,因此,只对比例环节和积分环节进行修正,其修正过程如下:
(1)当误差e变大时,说明控制系统输出误差绝对值变大,则调节Δkp,使其变大,从而提高系统的响应速度。但是,为了避免ec瞬间过大,同时调节Δki,使其变小,通常取值为Δki=0。
(2)当误差e保持中等大小时,为了保证系统响应速度和超调量,Δkp取较小值,Δki取较大值。
(3)当误差e变小时,为了保持控制系统处于良好的控制性能,应该同时调节Δkp和Δki,使其增大。
根据模糊规则对kp和ki进行调节,其调节方程式[15]为

式中:kp和ki为设置值;Δkp和Δki为变量值。
模糊控制器的输入误差e和误差变化率ec的范围称之为基本论域。假设误差论域为[-emax,emax],误差变化论域为[-ecmax,ecmax],控制论域为[-umax,umax]。误差模糊子集论域为X=[-n,-n+1,…,0,…,n-1,n],误差变化模糊子集论域为Y=[-m,-m+1,…,0,…,m-1,m],控制量u模糊子集论域为Z=[-l,-l+1,…,0,…,l-1,l]。通常情况下,误差论域范围n≥6,误差变化论域范围m≥6,控制量的论域范围l≥7。
误差的量化因子表达式为

误差变化的量化因子表达式为

控制量比例因子表达式为

3 仿真及分析
为了验证机器人多电机模糊PID控制器的控制效果,采用Matlab软件对机器人不同关节角位移跟踪进行仿真,并且与PID控制跟踪进行对比。机器人仿真参数设置如下:机器人关节连杆质量为m1=m2=m3=1 kg,关节连杆长度为l1=l2=l3=1.0 m,比例系数设置为kp=4.5×105,积分系数设置为ki=1.9×105,微分系数设置为kd=6.8×105。假设机器人关节角位移为q1=q2=q3=4cos(πt/2)。
假设多电机机器人关节在小波形(y=cos(2πt))扰动环境中运动时,采用PID控制器和模糊PID控制器,关节角位移跟踪结果如图7所示。

图7 多电机关节角位移跟踪结果(一般扰动)Fig.7 Tracking results of joint angular displacement of multi motor(general disturbance)
由图7可知:在一般扰动环境中移动时,多电机驱动机器人采用PID控制器,各个关节角位移跟踪误差较小;而采用模糊PID控制器,各个关节角位移跟踪误差较小。因此,两种控制器都能较好地实现机器人关节角位移的跟踪任务,跟踪精度较高。
假设多电机机器人关节在大波形(y=20cos(2πt))扰动环境中运动时,采用PID控制器和模糊PID控制器,关节角位移跟踪结果如图8所示。
由图8可知:在大扰动环境中移动时,多电机驱动机器人采用PID控制器,各个关节角位移跟踪误差较大,超调量较大,控制系统不稳定;而采用模糊PID控制器,各个关节角位移跟踪误差较小,超调量较小,控制系统较为稳定。因此,模糊PID控制器能较好地实现机器人关节角位移的跟踪任务,跟踪精度较高。
机器人采用PID控制器,只能适应精度要求不要的场合或者在一般扰动环境中,才能完成机器人关节角位移跟踪任务。但是,采用模糊PID控制器,能够抑制外界扰动波形对机器人关节角位移跟踪的影响,超调量较小,系统反应速度快,更适合机器人关节运动精度较高的场合。
4 结论
针对机器人关节运动过程中角位移跟踪误差较大问题,设计了多电机联合控制,并采用模糊PID控制器,通过仿真验证其控制效果,主要结论如下:①采用并行多电机控制,机器人各个关节驱动电机模块相互独立,某一个电机模块出现大的扰动时,其他电机模块不受影响,能够保持正常的工作状态;②在一般扰动环境中,机器人关节角位移采用PID控制器和采用模糊PID控制器,都能较好地实现关节角位移跟踪任务,跟踪误差较小;③在大扰动环境中,机器人关节角位移采用PID控制器,跟踪误差较大,而采用模糊PID控制器,跟踪误差较小。因此,模糊PID控制器可以抑制外界环境的干扰,从而提高机器人角位移跟踪精度。
猜你喜欢
计算机仿真(2022年2期)2022-03-15
北京航空航天大学学报(2021年7期)2021-08-13
哈尔滨工程大学学报(2021年7期)2021-07-13
机电信息(2021年17期)2021-07-01
成都信息工程大学学报(2021年6期)2021-02-12
内燃机与配件(2020年22期)2020-09-10
空间科学学报(2020年6期)2020-07-21
中国惯性技术学报(2019年3期)2019-10-15
计算机与数字工程(2019年8期)2019-09-03
中国惯性技术学报(2019年6期)2019-03-04