
电液比例放大器双边驱动电路设计及颤振信号比较研究*
2020-06-28 11:50游有鹏
机电工程 2020年6期
刘 宁,游有鹏
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引 言
电液比例放大器是电液比例阀的控制核心,直接影响电液比例阀的控制性能。目前,电液比例放大器主要有模拟式和数字式两种。其中,模拟式比例放大器通过运算放大器等电子元件实现计算,原理简单、电流控制精确(颤振信号叠加方便),但功耗温升大、对电路元件依赖性强;数字式比例放大器通过微处理器实现恒流控制,不仅数据处理能力强,有利于复杂算法的实现,而且驱动电路采用脉宽调制(PWM)信号,控制绝缘栅场效应管(MOS)工作在截止区和饱和区,功耗和发热更低,已逐渐成为当今比例放大器的发展主流[1]。
本文针对现有数字式比例放大器的不足,围绕影响性能较大的驱动电路和控制信号颤振叠加开展分析设计:对常用的反接卸荷式驱动电路存在的问题进行分析和改进设计;给出颤振叠加的实现方法,并对颤振叠加信号的类型和参数进行仿真分析与实验比较。
1 驱动电路设计
数字式比例放大器主要包括控制电路和驱动电路两部分。控制电路以微处理芯片为核心,计算并输出PWM控制信号;驱动电路负责将控制信号功率放大驱动比例阀。为了保证控制精度和抗干扰性能,常引入阀芯位置反馈和电流反馈[2]。
整个比例放大器构成如图1所示。
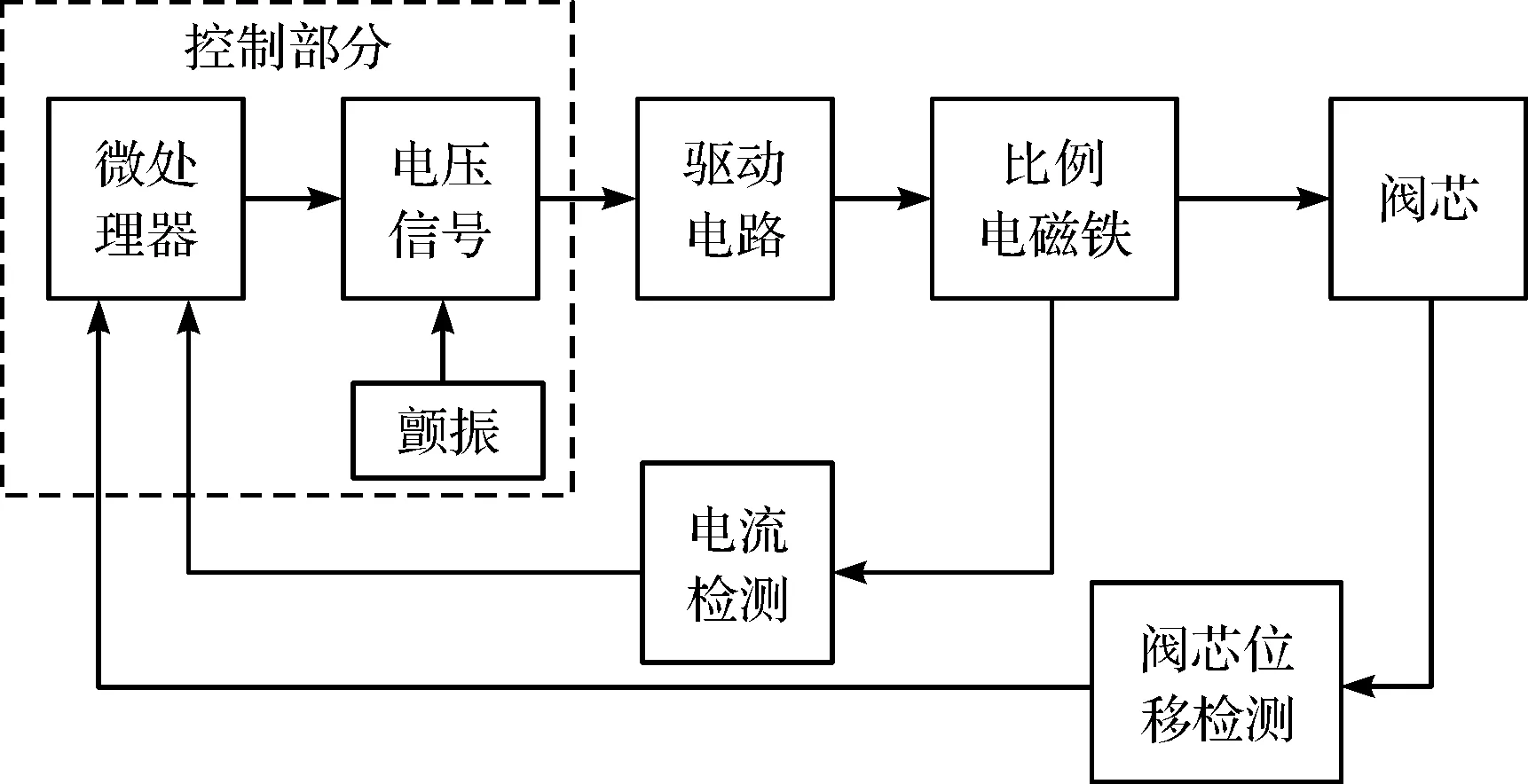
图1 比例放大器系统框图
目前,数字式比例放大器大多采用反接卸荷式驱动电路[3-4],其电路原理简图如2所示。
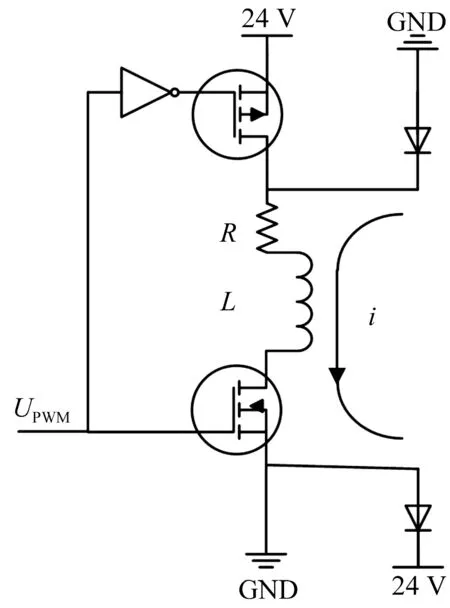
图2 反接卸荷式电路原理简图
图2中,由MOS管控制的上、下桥臂同时导通或关断,当UPWM由逻辑1跳变到0时,上、下桥臂同时关断,由于比例电磁铁电感的续流作用,会在线圈两端产生反向的驱动电压,导致电流迅速泄放完毕。
这种方式下驱动电路的动态频宽好,不仅可用于电液比例阀驱动,也适用于柴油机电子燃油喷射等高频响系统。
但由于电流泄放速度快,当UPWM占空比小于50%时,可能导致比例电磁铁电流不连续,即断流现象,从而导致低占空比时阀芯驱动能力迅速下降,影响阀的控制性能。
为解决这一问题,本文将反接卸荷式驱动电路上桥臂和下桥臂的MOS管控制端分开独立控制,构成双边驱动电路。
双边驱动电路原理简图如图3所示。
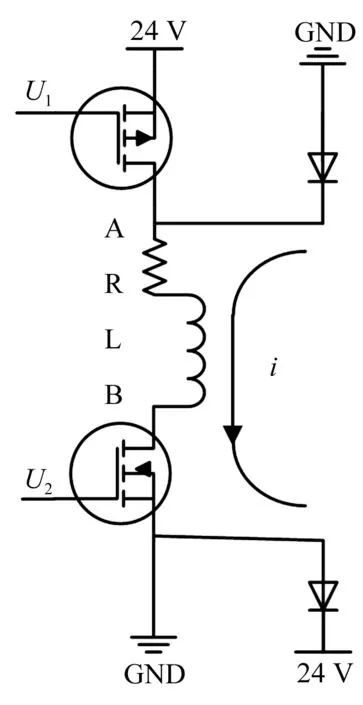
图3 双边驱动电路原理简图
笔者通过设计不同的控制逻辑,形成驱动电路的多种工作模式。
模式1。上、下桥臂同时输入PWM波,电路为传统反接卸荷式驱动电路;
模式2。上桥臂导通,下桥臂输入PWM波,电路为低边驱动形式,通过调整PWM占空比调节电流。下桥臂关断时电流通过二极管续流泄放较慢,电流连续;
模式3。上、下桥臂同时关断,电路为反接卸荷形式,在反向24 V作用下电流迅速泄放,可以与模式2配合使用。
双边驱动电路的3种工作模式及其对应的控制逻辑如图4所示。
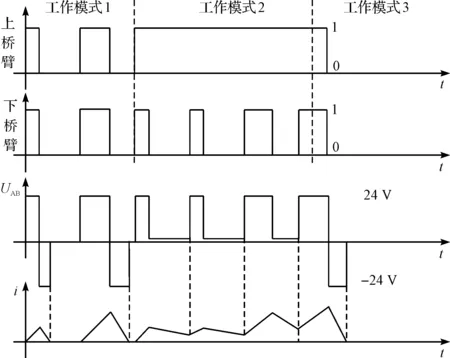
图4 双边驱动电路工作模式上、下桥臂导通为逻辑1,关断为逻辑0;UAB—阀两端电压;i—比例电磁铁电流
图4可知:
利用双边驱动电路可以灵活组合出多种驱动电路形式。如将其应用于电液比例方向阀的控制,只需模式2与模式3配合使用:同向调节比例阀开口大小时,可用模式2保证比例电磁铁电流连续,避免小占空比时反接卸荷式驱动电路的断流问题;切换方向时,可用模式3实现电流迅速泄放,提高换向速度。
因此,通过双边驱动电路及组合控制逻辑,不仅克服了反接卸荷式驱动电路PWM信号低占空比的断流问题,提高了阀芯定位精度,还可方便地实现比例方向阀快速换向控制。
2 颤振叠加与分析比较
由于阀芯与阀套间静摩擦大于动摩擦,阀芯运动灵敏度会降低并且带有滞环。比例放大器常通过叠加颤振信号提高灵敏度、改善滞环[5]。
2.1 颤振叠加电路设计
数字式比例放大器的驱动信号为PWM波,颤振信息的叠加只能通过PWM波占空比体现。叠加的实现方法有软件和硬件两种,但通过软件编程进行叠加不便,本文采用硬件实现,思路是先将微处理器产生的PWM信号经过滤波成为直流,线性叠加颤振信号后,再将其调制为PWM波[6],此时的PWM波占空比便带有了颤振信息。
颤振信号线性叠加到直流信号采用加法电路实现,如图5所示。
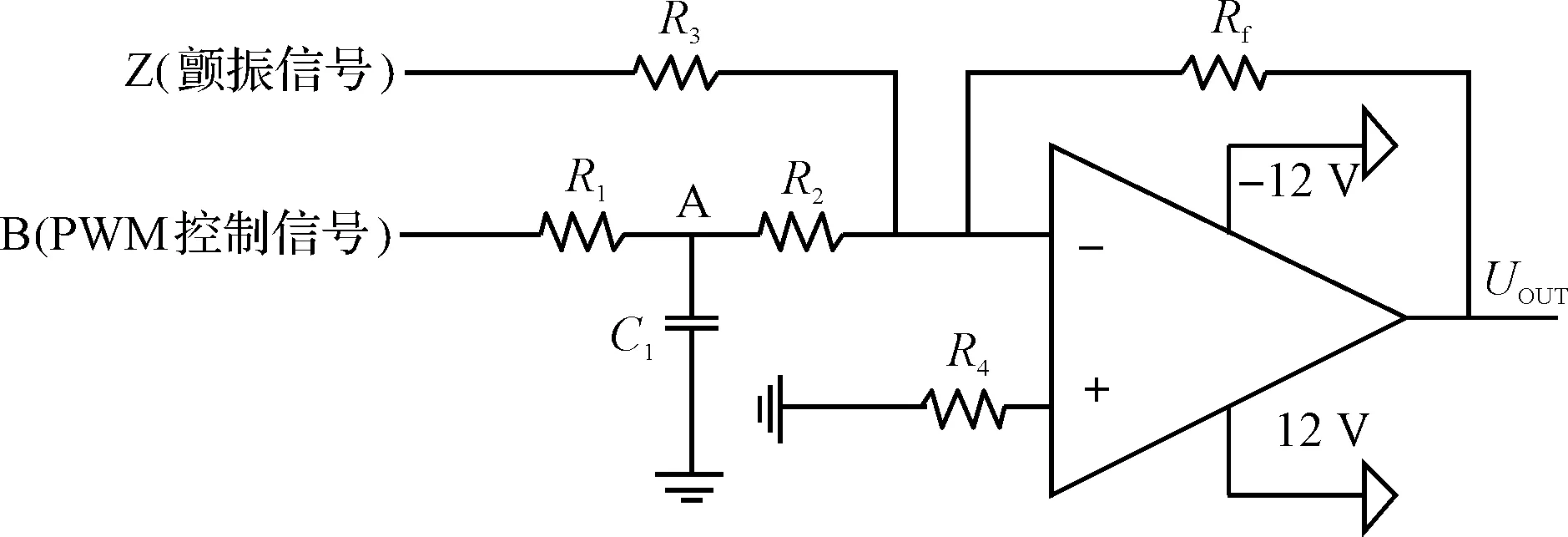
图5 颤振线性叠加电路
当PWM控制信号频率大于R1和C1组成的低通滤波器截止频率的10倍时,认为高频谐波完全滤去,PWM控制信号在A点变为稳定直流信号,即:
(1)
通过式(1)计算,可选择合适的电阻电容值。根据相关资料,此处取电阻R1=5 kΩ,电容C1=100 nF,这样运算电路工作稳定可靠、元件廉价易得[7]。
加法电路输出端与B、Z两输入端之间的关系可以近似表示为:
(2)
式中:UBdc—B点PWM控制信号的平均值;UZ—Z点颤振电压值。
由式(2)可知:通过调整UZ或R3可独立调整颤振幅值;由于运算放大器输出反相,需后接反相器调相[8]。
同时,PWM调制的三角波频率决定了后级驱动电路中MOS管的开关频率,为了降低MOS管功耗和温升,开关频率不宜太高,但是开关频率太小也会导致比例电磁铁电流寄生颤振[9],因此,这里笔者选择三角波频率为1 000 Hz。
2.2 颤振信号的比较分析
工程上常用的颤振信号主要有三角波、正弦波、方波3种,如何选择其类型以及幅值、频率将直接影响比例阀性能。为此,本文以阀芯微动幅值大小和滞环改善情况为评价指标,通过建模仿真和实验对3种颤振信号及其参数进行评价和优选。
首先本研究通过仿真比较3种颤振信号的优劣。
根据电路组成结构,笔者在Simulink中建立比例阀及其放大器的开环模型,如图6所示。

图6 系统仿真模型
其中,颤振信号叠加和调制部分根据前文电路搭建;比例阀电流惯性环节和阀芯位移环节的具体模型推导可参见有关资料[10]。
仿真时,笔者给定控制信号为1.65 V阶跃信号,分别叠加3种颤振信号后比较阀芯处的微动幅值;颤振信号频率为100 Hz、150 Hz和200 Hz,颤振幅值为20%。
实验得到3种颤振叠加的阀芯微动幅值如表1所示。
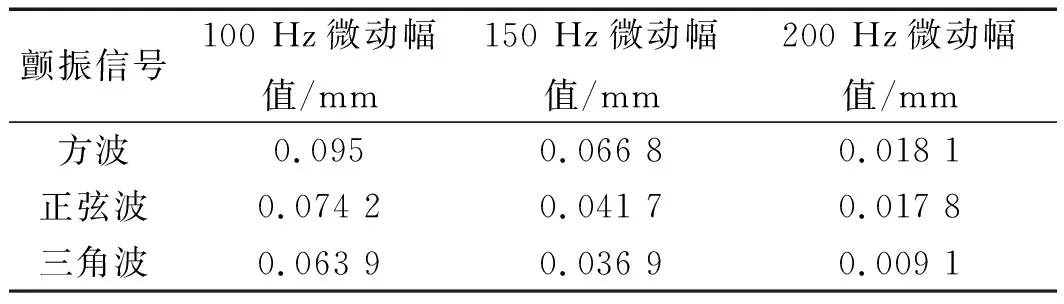
表1 阶跃信号下不同颤振叠加的阀芯微动比较
从表1可以看出:
叠加方波颤振后阀芯微动值最大,原因可能是方波包含多次谐波,即使有部分高次谐波被平滑滤去,仍有部分谐波保留为阀芯微动做出贡献;同时,一定范围内阀芯微动幅值随颤振信号频率增加而下降。当给定控制信号为幅值3.3 V、频率为5 Hz正弦波,仿真上述3种颤振叠加时的阀芯微动情况,仍然是叠加方波颤振后阀芯微动幅值最大。
可见,正弦波、三角波、方波3种颤振叠加信号中,方波的颤振效果最好。
2.3 实验及结果分析
为验证数字比例放大器的颤振叠加效果,笔者将前述电路制板并进行实验。实验中,通过比例阀LVDT装置反馈的阀芯滞环大小Ufb评判颤振叠加效果。
首先比较相同参数下方波颤振、三角波颤振和正弦波颤振对阀芯滞环的影响。为方便观察,笔者选择颤振信号频率为100 Hz,颤振幅值为20%。
改变PWM控制信号占空比,控制阀芯位移从0到极值再返回到0,得到同一占空比下阀开口增大和减小时的阀芯位移反馈值Ufb+和Ufb-,将其作差得到阀芯位移滞环值Ufb,通过最小二乘拟合后,3种颤振叠加20%的阀芯滞环对比如图7所示。
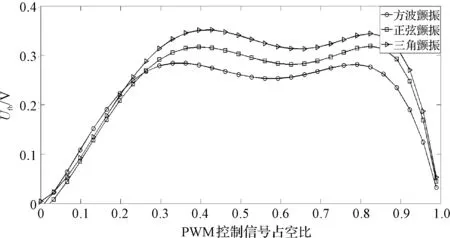
图7 3种颤振叠加20%的阀芯滞环对比
从图7可得,叠加方波颤振后阀芯滞环小于叠加三角波和正弦波的阀芯滞环,说明了相同参数下方波颤振信号效果更佳。
为比较不同振幅的颤振信号对阀芯滞环的影响,笔者分别设定振幅为0、10%、20%、30%的颤振方波,重复上述实验。
实验可得出的阀芯滞环值如图8所示。
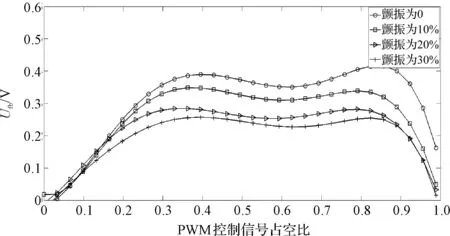
图8 叠加不同振幅方波颤振的阀芯滞环对比
从图8可得,在一定范围内,阀芯滞环随颤振幅值增大而减小,叠加20%的颤振方波时,阀芯滞环比无颤振时减小近40%。
为了保证阀芯运动精度,实际应用中叠加20%的颤振信号即可,无需加大颤振幅值。
3 结束语
本文对数字式比例放大器的驱动电路和控制信号颤振叠加进行了分析与设计,在驱动电路方面,分析了反接卸荷式电路的不足,并提出了双边驱动电路及其工作模式;在控制电路方面,给出了一种颤振叠加电路方案,对颤振信号类型和参数的作用效果进行了建模仿真和实验验证。
研究结果表明:方波颤振在提升阀芯运动灵敏度和减小滞环方面优于三角波和正弦波颤振;叠加20%的方波颤振比无颤振叠加的阀芯滞环减小近40%,可显著改善比例阀的定位精度。
本研究可对数字式比例放大器的驱动电路设计和控制信号颤振叠加提供一定的参考。
猜你喜欢
仪表技术与传感器(2022年6期)2022-07-27
机械管理开发(2022年2期)2022-05-12
四川工商学院学术新视野(2021年2期)2021-11-02
航空发动机(2020年3期)2020-07-24
中华建设(2019年3期)2019-07-24
浙江工商职业技术学院学报(2019年2期)2019-07-09
减速顶与调速技术(2018年1期)2018-11-13
减速顶与调速技术(2018年2期)2018-11-09
电子制作(2017年22期)2017-02-02
光学仪器(2015年2期)2015-05-20
