
考虑耦合件的耦合模块化设计方法及应用研究*
2020-06-28 11:50陈周娟陈俊杰
机电工程 2020年6期
陈周娟,陈俊杰
(运城学院 机电工程系,山西 运城 044000)
0 引 言
机械产品模块化设计[1-2]主要利用相似性原理,将机械系统分解为不同的模块,进行设计、制造与装配,从而达到以尽可能少的投入,生产出尽可能满足不同需求的、令用户满意的个性化机械产品。利用模块化设计可以缩短产品的开发周期,实现分布式协同设计,降低产品生产的复杂度,使产品设计、调试和维护等操作简单化。基于这些优点,模块化设计在大规模的产品设计中得到了广泛应用,如减速器、计算机、机床、家具、玩具等[3]。目前,为满足用户的多样化、个性化需求,模块化设计的方法也在多品种、小批量、重用次数少的机械产品设计中得到了深入研究和应用,如轮毂轴承清洗机[4]、机器人[5-6]、各种航空航天的机械装置[7]、工程机械[8]和一些复杂产品的模块化设计[9]等。
目前,模块化设计方法有很多,国内外学者从不同的角度和深度进行了研究。SUH N P[10]认为模块化设计是一种从功能需求域到设计域的参数的映射结果;STONE B R和WOOD L K[11]认为模块化设计是客户需求域到产品结构的一个映射,提出了用黑箱模型对机械产品进行功能分解,并根据输入、输出流之间的关系,采用了启发式模块设计方法,以零件之间的关系作为产品功能模块划分的依据;ULRICH K和TUNG K[12]强调了功能模块划分时一定要考虑机械产品的特点,而且模块的结构和功能尽可能相似并对应,从而使得模块的物理结构之间尽量独立,不耦合;PAHL G和BEITZ W等[13]认为在模块化系统的开发中,功能结构的建立尤为重要,同时还从模块技术和经济优化的角度出发,将使用很少的变体从模块中删除掉了,使得模块更适应大规模制造;KRENG B V和LEE T[14]提出了一种非线性规划方法来识别可分离模块,同时优化模块的数目的方法,并将模块化设计分为功能和物理相互作用分析、识别模块化驱动器外形的影响、使用非线性规划模型以及使用分组遗传算法优化模块化设计等4个阶段;LI Jun和ZHOU Jing-kai等[15]提出了通过机械产品的特征来定义模块,并根据模块特征信息和语义关系将相似模块划分为一个集合,生成了模块族,进而提出了3种模块化设计方法;HONG E和PARK G[16]提出了用公理化设计方法,将概念设计阶段的功能需求映射到结构设计矩阵,并通过模糊逻辑、遗传算法和距离惩罚算法,对设计参数进行了聚类和定义模块;MUTINGI M等[17]认为产品设计应该考虑环境的保护与可持续性,面对产品整个生命周期,当设计信息不完全时,提出了一种多准则模糊分组遗传算法,用于评价可能的模块化设计;SAKUNDARINI N等[18]通过优化算法,对模块库中的模块进行了重新排列或更改,以增加产品品种。
贾延林认为模块化划分是建立在对系统功能分析和产品规格的基础上的;高卫国等[19]在分析具有相同功能的不同模块及其变形的基础上,抽象出了一种柔性模块;章海峰和谭建荣等[20]提出了面向广义工程更改的产品模块划分;侯文彬等[21]则将模块划分为无需更改的核心共享模块、局部尺寸变化的柔性模块和尺寸结构需要较大改动的参数化设计模块,然后分别采用了不同算法设计模块。
以上方法都是面向大规模定制的机械产品的模块化设计方法,模块划分的结果是想得到独立性较强、耦合性最小的结构模块,从而有利于模块的组合与连接,便于模块大规模的推广和应用。这些研究从不同的角度,为模块的划分层次提出不同的思想,或侧重于功能模块的划分,或侧重于结构模块的划分。侧重于功能模块的划分,从设计便利的角度出发,没有考虑到用户对结构模块的简单需求;而侧重于结构模块的划分,从产品及其零部件的结构考虑,便于产品的变型设计,但提高了设计者的功能划分难度。
目前,对于单批量、多规格、结构模块耦合的机械产品模块化设计少有研究,笔者针对这种机械产品模块化设计,从有利于设计者和用户的角度出发,提出一种考虑耦合件的机械产品耦合模块设计方法,并以舱门开关机构设计为例,对提出的方法进行验证。
1 机械产品模块化设计方法分类
在模块化设计时,一般首先把机械系统按照功能原理划分为若干个功能模块,然后再以这些模块为基本单元分别进行设计,最后加工、装配出结构模块。
模块化设计过程是设计者的设计活动到客户需求的一个映射,设计域到需求域的映关系如图1所示。
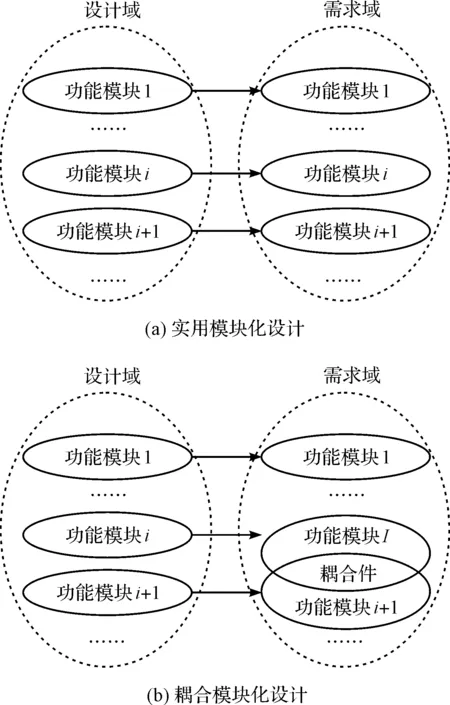
图1 设计域到需求域的映射关系
功能模块是面向设计者从有利于设计的角度划分的模块,结构模块是面向用户从有利于应用的角度划分的模块。设计者希望提高机械产品的设计效率和质量,而用户却希望模块组合简单、满足需求,二者考虑问题的角度不同,因而功能模块和结构模块之间可能会存在多种对应情况。
如果功能模块能与结构模块一一对应,那么划分的功能模块就是一个“实用模块”,这种设计方法称为实用模块化设计,如图1(a)所示。实用模块的特点是模块整体性强,模块之间的边界清晰,基本没有耦合性,接口通用性好,有利于模块互换。用户很容易通过不同的组合方式,得到不同种类和不同规格的机械装置;而且因为其良好的互换性,具有很高的装配和维修速度。通过将模块标准化、通用化的设计,实用模块化设计非常有利于机械产品的大规模推广和应用。但是刻意强调模块之间的颗粒性,则会导致模块结构设计复杂,体积变大,零件利用率降低。
如果满足设计要求的功能模块在结构化以后,结构模块之间出现交叉,在某一个要素上发生强耦合,则称为耦合模块化设计,如图1(b)所示。图中结构模块i和结构模块i+1之间在某一要素上重叠,这时称该要素为耦合件。耦合件被两个结构模块公用,不能强行将其拆解。如果被强行拆解并入任一模块,则另一模块将会散掉。这种功能模块的结构松散,不能称之为真正意义上的模块,故称之为耦合模块。
相比实用模块化设计时尽量避免耦合件的出现,考虑耦合件的模块化设计中的耦合件则是有意引入的。耦合件会使机械产品结构变得紧凑,同时提高了零件利用率,但要注意耦合件是在不影响机械产品功能的基础上引入的。耦合模块化设计非常适合于单批量、多规格的机械新产品快速设计。
当模块化的机械产品在不同规格的产品中互换,且该耦合件正好是置换件时,耦合件的引入在某种程度上反而提升了模块装配的重复度,导致装配和维修时间和难度增加。此时,解耦就成为耦合模块化设计的关键问题。
2 考虑耦合件的耦合模块化设计方法
考虑耦合件的耦合模块化设计流程如图2所示。
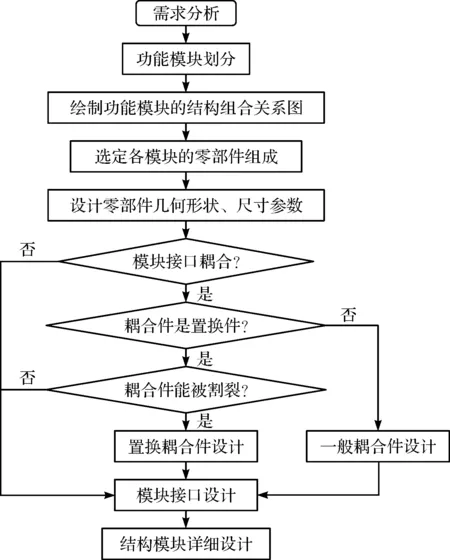
图2 考虑耦合件的耦合模块化设计流程图
从图2中可以看出:该方法主要是针对功能模块独立,结构模块耦合的模块化设计。设计过程主要包含:需求分析与功能模块的划分、功能模块的构建、模块接口设计以及结构模块的详细设计。
2.1 需求分析和模块划分
考虑耦合件的模块化设计过程中,首先是将客户需求进行整理,按所提出的技术要求作出分析,明确机械产品的功能需求;然后利用功能原理和相似性原理等,将总功能逐步分解为若干个独立的、功能单一的、有解的、接口良好的功能模块(称为功能元),最后选定功能模块的传动方案。
该过程可以通过创建功能树实现。功能树的创建方法一种是自顶向下的方法,另一种是自底向上的方式。一般先采用自顶向下的方法进行功能模块的划分,然后再用自底向上的方法进行修正。自顶向下的设计方法从机械系统的总功能出发,逐步进行划分,直到划分的功能单元可以求解出具体的传动方案和物理结构,划分过程中同时还要确立各模块之间的相互关系。
2.2 功能模块的构建
机械系统功能的实现需要依靠具体的机械结构来实现,功能模块的设计过程就是功能域向需求域的映射过程。这一步主要是对功能模块的初步结构化进行设计,得到各模块的基本结构和基本尺寸。为了搞清楚各模块之间的装配关系,笔者首先需要绘制功能模块结构的组合关系图,然后选择组成各模块的零部件,并对其进行几何形状和尺寸参数的初步设计。设计过程中需要考虑模块的接口零件是否需要耦合,并对耦合件进行设计,最后对各模块的接口进行设计。
2.2.1 功能模块结构组合关系图的绘制
从结构组合的角度描绘出各功能模块的关系图,不仅可从结构上详细规划各功能模块之间的功能传递关系,还可从中体现它们之间的约束关系。
功能模块的结构组合关系是一种基于结构组合的功能模块关系,具体如图3所示。
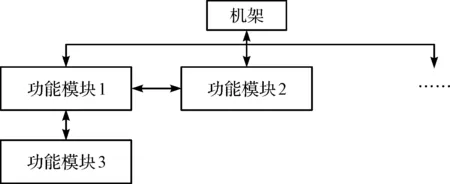
图3 功能模块的结构组合关系
绘制功能模块的结构组合关系图一般应从机架开始,按照功能传递关系绘制各个模块。图3中,双箭头表示两功能模块之间在结构上存在直接连接关系,功能模块结构化过程中可能存在耦合件。
2.2.2 各模块零部件组成与连接关系的选定
根据功能模块的方案,笔者设计选定组成各模块的零部件的类型、特点及性能等,同时确定各零部件之间的连接关系及各模块之间的接口关系,然后绘制机械产品的功能模块零件组成与连接关系,如图4所示。
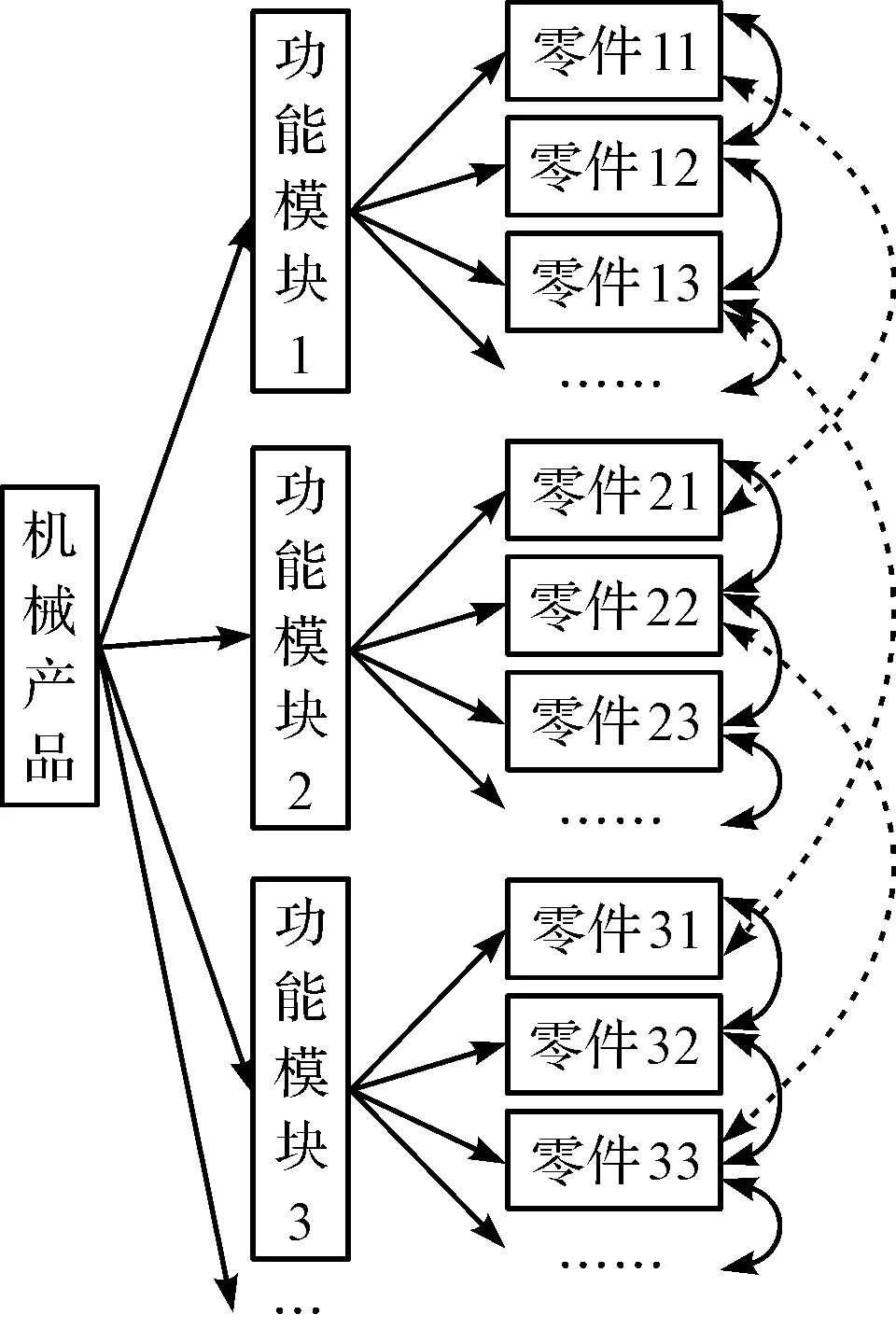
图4 功能模块的零件组成与连接关系
图4中,双箭头实线代表零部件之间有连接关系,虚线代表两模块之间有接口。
2.2.3 零部件几何形状和尺寸的设计
根据选定的零部件,设计其具体的几何形状,初步选择尺寸参数,以便确定模块接口之间是否耦合。
2.2.4 耦合件的设计
耦合件处于两个串联模块的接口处,设计时需要考虑:(1)模块之间的功能输入、输出的传递关系,确保功能顺利传递,如串联机构中前一个机构中从动件输出的运动一定要满足后一个机构中主动件的运动要求;(2)确保模块之间不产生空间位置、运动的干涉;(3)耦合设计后结构尺寸变得紧凑,但不影响拆装效率;(4)耦合件是否是置换件。
在设计之前,一定要先判断耦合件是否是一个置换件,如果不是就按照一般耦合件进行设计,此时只需考虑将两个模块的接口零件进行合并,并按照一般的零件接口进行设计。
如果耦合件是置换件,在置换时就会影响拆装效率,一种解决办法是仍然采用原来的办法,将两个模块独立设计;另一种办法是根据功能要求将耦合件割裂成许多大小不等的块,然后根据尺寸、规格要求在各块之间设计动态接口,将耦合件设计成尺寸可调的零部件。耦合块之间的接口主要是满足不同尺寸调整需要的,所以螺纹连接设计居多。需要注意的是:割裂耦合件的时候,一定要保证模块之间的连接性能和机械系统的整体性能不能受到损失。
2.3 模块接口设计
模块接口是指结构模块在组合时,各模块之间的满足一定几何、物理关系的结合面,是模块之间进行对接交互的方式,接口设计的好坏直接影响模块的装配问题和机械装置的强度、刚度、稳定性和精度等性能。
模块接口在设计时应遵循以下原则:(1)结构简单,便于连接和分离;(2)满足机械系统的强度、刚度等性能要求;(3)便于机械产品通用化、标准化和规格化;(4)便于加工制造。
具体设计时,首先对各功能模块之间的技术要求进行分析,选择适用的接口形式。结构模块之间的接口有动态和静态之分,动态接口主要通过运动副或机械动连接的形式实现,静态接口主要是通过机械静连接的方式实现;然后在保证功能需求的基础上,根据接口综合性能选择出接口的基本形状,并给出接口的参数;最后对设计的接口进行强度、刚度、稳定性、耐磨性、经济性等方面进行分析计算。
2.4 结构模块的详细设计
完成上述初步设计后,笔者根据各个模块的基本结构和基本尺寸,综合考虑零部件的工作能力、装配、调整、润滑和加工工艺等,完成所有零部件的详细设计及零件图和工作图的绘制。
3 舱门开关机构的设计要求
笔者研制的舱门开关机构用于测试不同型号的舱门运动性能,适合采用考虑耦合件的耦合模块化设计方法进行设计。
3.1 舱门开关机构的设计要求
舱门开关机构的具体设计要求如下:
(1)一套开关机构可完成直径不同的多个型号舱门的开关试验,舱门除外形尺寸有所差别外,结构基本相同;
(2)试验时舱门竖直安装在测试空间内,门轴在上,需要使用开关机构操作舱门上两个转动手柄和一个把手;
(3)操作两个转动手柄的转动机构均要求双向任意角度转动,输出力矩接近;
(4)开关机构安装在测试空间内舱门门框上;
(5)限制测试装置的重量。
3.2 功能模块的划分
根据上述设计要求可知,开关舱门需要先后操作两个转动手柄和一个把手,故舱门开关需要3个独立的机构分别实现对两个转动手柄和舱门把手的操作,同时还要能够方便地安装在直径大小不同的舱门门框上。
由于舱门上的两个转动手柄转动要求相似,可以采用同一种机构分别对这两个手柄进行操作。笔者根据机械系统功能原理及相似性原理,将整个机械系统分为3个功能模块:手柄转动模块、把手推拉模块和支撑模块。
4 舱门开关机构的耦合模块化设计
4.1 功能模块的结构组合分析
舱门开关机构中的两个手柄转动模块和把手推拉模块均需固定在支撑模块即机架上,所以这3个模块与机架之间都有可能存在耦合件。
4.2 各模块零部件组成
舱门开关机构的各模块零部件组成如图5所示。

图5 舱门开关机构的各模块零部件组成1—拨杆;2—拨杆梁;3—传动轴;4—托盘;5—圈梁;6—减速器1;7—电机1;8—电机2;9—减速器2;10—传感器;11—轴承座;12—转轴;13—上连杆;14—横梁立柱连接块;15—下连杆;16—舱门;17—门框;18—纵梁;19—横梁;20—立柱;21—门框立柱连接块
从图5中可以看出:支撑模块由纵梁、横梁和立柱组成,纵梁与横梁之间通过嵌入方式和螺纹连接在一起,横梁和立柱、立柱和门框之间分别通过横梁立柱连接块和门框立柱连接块进行连接。
把手推拉模块的动力经电机2、减速器2、转轴、上连杆、下连杆传递给舱门把手,力矩传感器2装在转轴上,间接测量开(关)门力。整个传动装置安装在轴承座上,轴承座固定在支撑架横梁上。轴承座与横梁的连接即是这两个模块之间的接口,连接简单,不存在耦合关系。
手柄转动模块主要由电机1、减速器1、传动轴、力矩传感器1、托盘、拨杆梁、拨杆等组成,动力从伺服电机1开始,经过减速器1、传动轴、拨杆梁传递给拨杆,其传递关系如图5所示。力矩传感器1安装在托盘和传动轴之间,托盘与减速器通过一个圈梁连接在一起,从而使得所有零部件组成一个完整的独立的模块。圈梁也是手柄转动模块与支撑模块的接口,通过轴孔配合的方式保证安装精度,然后通过螺纹连接在纵梁上。
4.3 耦合件设计
以上3个模块独立成一体,各自之间有良好的接口,但是该设计方法的结果使支撑模块上的纵梁宽度占据舱门直径一半以上,导致整个开关机构体积庞大,重量增加;同时,在不同直径舱门上使用时需要替换不同的纵梁,会导致装配时间过长,生产成本高,还可能影响零件之间的配合精度降低。
笔者通过分析,手柄转动模块上的圈梁和支撑模块上的纵梁可以合二为一,耦合在纵梁上。但是,为适应不同直径的舱门上的手柄和把手位置,当开关机构安装在不同直径的舱门上时,需要更换纵梁,所以纵梁属于置换件。按照耦合模块的设计方法,笔者将耦合件纵梁割裂成两大块——纵梁上段和纵梁下段,二者之间通过螺纹连接方式进行连接与尺寸调整,实现耦合件——纵梁的解耦。
纵梁解耦设计结果比较如图6所示。
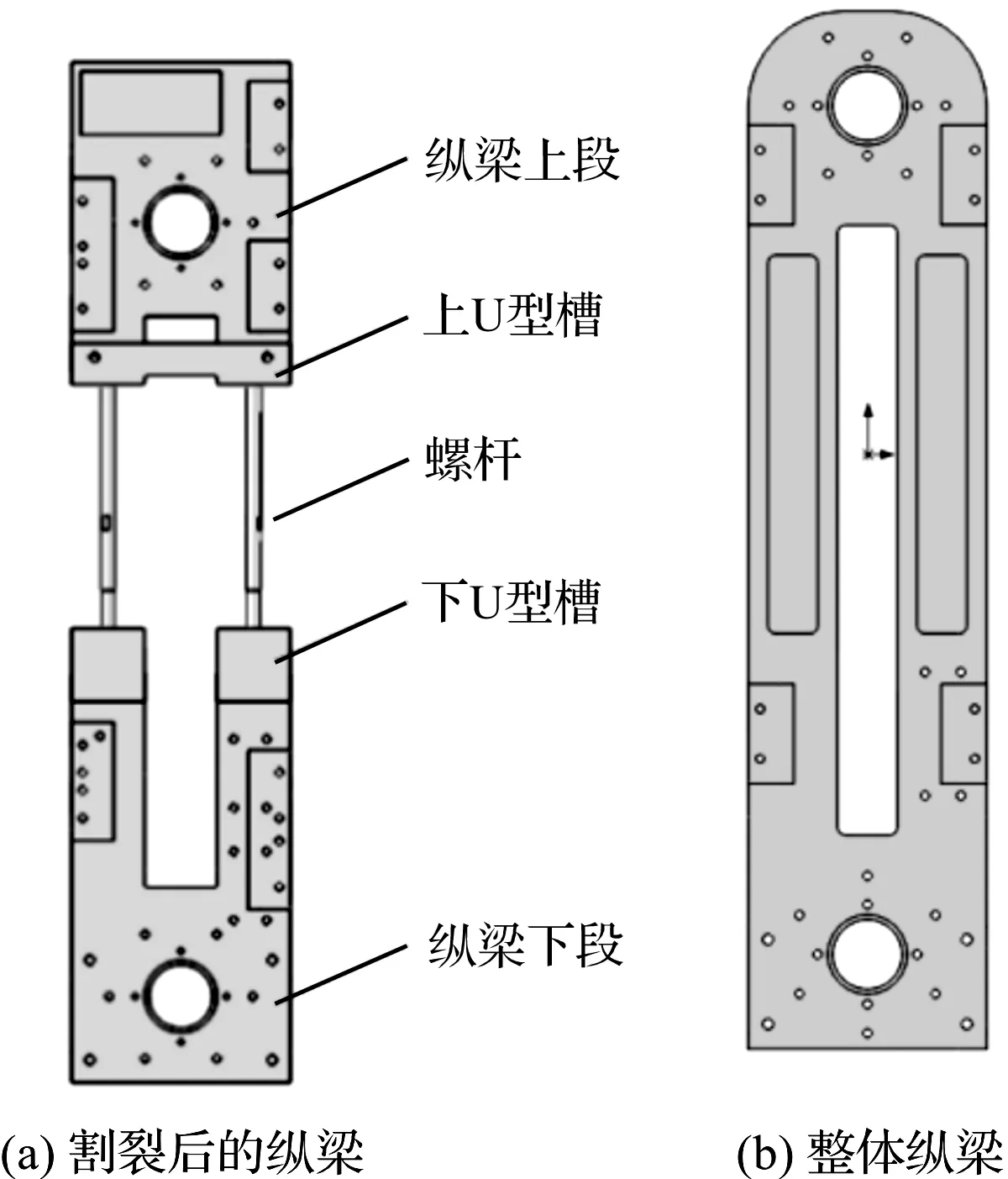
图6 纵梁解耦设计结果比较
通过图6可以看出:割裂后的纵梁相比整体纵梁,既满足了在不同直径舱门上测试时两个转动手柄不同中心距的要求,又避免了纵梁的置换,同时还减轻了重量。
5 结束语
笔者提出了一种考虑耦合件的耦合模块化设计方法,通过引入耦合件使得机械产品结构变得紧凑,功能模块之间尺寸可调;同时给出了耦合件尤其是置换件及其接口的设计方法。
笔者结合航天器舱门开关机构的设计要求,应用考虑耦合件的模块化设计方法将该机构划分为3个模块进行并行设计,将手柄转动模块和支撑模块的接口进行耦合,将耦合件—纵梁设计成尺寸可调的模块,既不影响纵梁的支撑作用,还有效解决了两个手柄中心距的调节问题。实验证明:该机构能够顺利完成在热真空环境下的舱门开启测试问题。
该模块化设计方法既有利于并行设计,提高了设计效率,又提高了零件利用率,还不影响整个装置的使用效率。设计方法适用于单批量、多规格的机械新产品的设计。
猜你喜欢
设备管理与维修(2021年10期)2021-06-22
汽车实用技术(2021年4期)2021-03-05
民用飞机设计与研究(2020年4期)2021-01-21
民用飞机设计与研究(2019年2期)2019-08-05
模具制造(2019年3期)2019-06-06
民用飞机设计与研究(2019年4期)2019-05-21
软件导刊(2016年9期)2016-11-07
通信电源技术(2016年5期)2016-03-22
自动化仪表(2015年11期)2015-04-01
浙江科技学院学报(2014年6期)2014-02-28
