
一种利用栅格光源特征编码的室内定位技术
2020-06-08 04:51牛小骥夏朋飞王智英
导航定位与授时 2020年3期
张 拓,牛小骥,夏朋飞,王智英,陈 昊,黄 亮
(1.武汉大学测绘学院, 武汉 430079;2.武汉大学 GNSS技术研究中心, 武汉 430072;3.中国民航科学技术研究院法规标准研究所, 北京 100028)
0 引言
随着城市的现代化发展,集居住、商业、办公、酒店、休闲等功能于一体的高层城市建筑综合体必然大量涌现[1],人们越来越多的时间将是在这些城市建筑综合体内部度过的。因此,在图书馆[2]、酒店、商场等室内环境下[3]对定位服务的需求必将日趋强烈。传统的卫星导航定位系统在室外空旷环境下可以达到较高的定位精度[4],但是,在室内或者城市峡谷环境下,由于建筑物的遮挡效应,卫星信号弱,定位精度大大降低甚至无法定位。为了解决室内精确定位的问题,目前急需一种或多种高效、便捷、准确的定位技术来填补空白,实现室内环境的精确定位。
目前,主要的室内定位算法分为以下四种:1)临近信息法:通过某种信号检测待匹配点是否在某个参考点附近;2)场景匹配法:将待匹配点的可测量特征向量与数据库中的特征向量进行比对,从而匹配待测点位置;3)几何定位法:根据待测点处接收到的参考点发出信号的到达角(Angle of Arrival,AOA)、到达时间(Time of Arrival,TOA)和到达信号强度(Strength of Arrival,SOA)等,利用几何原理,解算待测点位置;4)航迹推算法:依据初始位置和运动过程中的惯性传感器输出,对被定位对象的行为进行估算[5-6]。根据这些算法,衍生出了多种定位技术,如基站定位、WiFi定位[7]、无线射频识别(Radio Frequency Identification,RFID)定位[8]、超宽带(Ultra Wideband, UWB)无线电定位[9]、蓝牙(Bluetooth)定位和ZigBee定位[10]等室内定位技术[11-13]。然而,目前在这些定位技术中,基站定位和WiFi定位的定位精度不足,RFID定位和蓝牙定位的信号覆盖距离短,UWB定位的成本高,ZigBee定位易受环境干扰,因而这些室内定位方法无法满足室内位置服务(Location Based Services,LBS)的要求[5,6,14]。
近年来,随着高亮度白光发光二极管(Light-Em-itting Diode,LED)的飞速发展,可见光通信(Visible Light Communication,VLC)作为一种新兴的无线通信方式,在许多方面得到了广泛应用,基于VLC的室内定位技术也成为了研究热点。目前的研究中,可见光定位算法可分为三类[15]:1)三角测量法:通过对距离或者角度的测量来实现定位,包括测量AOA、TOA、到达时间差(Time Diff-erence of Arrival,TDOA)[16]和接收信号强度(Received Signal Strength,RSS)[17];2)场景分析法:将接收到的光强信息与已知光强分布进行匹配来实现定位;3)ID法:控制终端将位置信息通过编码调制加载到LED灯具上, 使每个LED灯具携带各自独有的位置信息,LED将信息以光信号的形式发射出去,在接收端接收后,通过对光信号的识别判断接收的ID信息来实现定位。有关文献[18-19]对基于ID法的室内定位技术做了研究。本文在此基础上尝试了一种利用栅格光源特征编码的室内定位方案,使用一套更加简洁高效的栅格光源特征编码方式,利用普通投影仪作为可控的闪烁光源,发出包含了位置特征编码的闪烁光,在手机用户端接收闪烁光,识别其中的特征编码,即可确定用户位置。定位算法简单,快捷准确,并通过实验评估了其精度和可靠性。
1 光源特征编码定位原理
自从LED面世后,随着光效的逐步提高,其应用从显示领域逐步扩展到照明领域,并且发展迅速。LED采用电场发光和低电压供电,具有寿命长、光效好、稳定性高、安全性好、无辐射、低功耗、可靠耐用等一系列优点。同时,LED又具备响应时间短、可高速调制的特性,因此使得LED从照明领域拓展到了通信领域,能够实现照明和通信的双重功能[20]。通过在公共基础照明设施上增加数据传输功能,可构建室内可见光无线通信网络[21],将信息从灯具发送到客户端。各种建筑物内部均有可见光光源,可为室内用户随时随地提供便捷的数据服务[22]。
相比于运用WiFi、Zigbee、RFID、UWB、蓝牙和蜂窝网络等各种类型基站的常规室内定位技术,基于可见光通信的室内定位技术具有以下几点明显优势:
1)可见光频带资源极为丰富,而射频信号的频段还需要申请。
2)射频信号极易受到环境内其他信源的影响,使其定位精度降低,同时,这些信号在传播过程中还存在非视距传播和多径效应会对其精度产生影响。对于可见光信号,有关文献[23]研究结果表明,一般室内LED照明光反射耗损较大,因此,室内反射光的影响在一定的室内环境条件下可忽略不计。因此,本文仅考虑光直线传播(Line of Sight,LOS)的情况。
3)基于LED可见光通信的室内定位采用LED光源,兼顾照明与定位。在室内场合推广使用,成本很低。
为了实现利用光信号进行室内定位的目的,必须使得光信号获得携带信息的能力。利用LED灯具可以高频闪烁的特性,可以控制LED光源以较高的频率进行明暗间歇闪烁,这样的闪烁频率极高,因而人的肉眼无法识别,但是可被光传感器识别。将光源的明状态编做“1”,暗状态编做“0”,则光源连续的明暗闪烁即对应在时间维度上的一串“0”和“1”的序列,即可用该序列来传递信息,如图1所示。
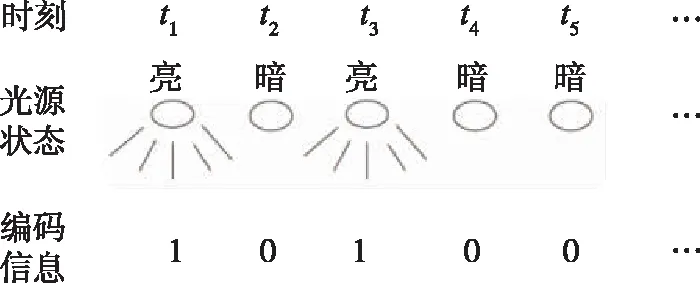
图1 利用光源明暗闪烁来编码信息Fig.1 Use light source blinking to encode information
本文介绍的利用栅格光源特征编码的室内定位技术是将一个LED灯具发光区分成若干个栅格区域进行控制,使得灯具照射到的区域也形成若干个规则的栅格,对每一个栅格给予一个唯一的身份特征编码。通过控制灯具发光区的不同栅格区域光源按照不同的编码方式发射闪烁光信号,使得在照射区的每个栅格内受到的信号光都携带了本栅格的特征编码,用户端处在不同的栅格内就会接收到不同的闪烁特征编码,如图2所示。
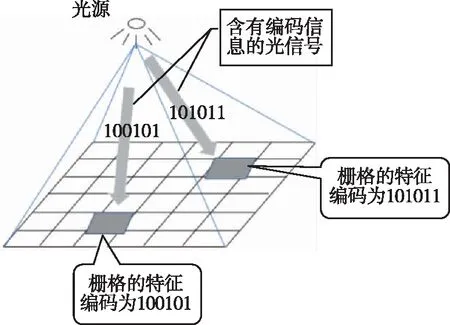
图2 光源向每个栅格区域发送其身份特征编码Fig.2 The light source sends its identity code to each raster
在实际应用中,光源的控制依靠LED灯前的电控透光玻璃[24]灯罩。LED灯前的灯罩由栅格电控透光玻璃组成,保持LED灯亮,利用电控系统控制每一块栅格的透光玻璃,按照栅格光源编码规律改变其透光性,由此形成栅格光源的明暗闪烁。
在用户端,使用光传感器获取光信号。市售智能手机自身携带多种传感器[25],基于智能手机的用户端可以借助其自身的光敏感器或者内置摄像头来获取携带有特征编码的闪烁光信号,并提取出其中的特征编码,便可确定用户在某一个光源照射区内所处的栅格位置;同时利用预装数据库或借助移动网络通信获取所有光源的位置及栅格划分情况,便可实现用户终端的高精度室内定位。
2 编码规则
利用栅格特征光源编码的室内定位基本过程是,先将发光区分栅格进行控制,每个栅格按照其栅格特征编码进行闪烁,发出包含栅格特征编码的闪烁信号光;然后用户端接收闪烁信号光并从中提取出特征编码,结合光源编码的数据库信息进而确定用户位置。在这一过程中,栅格特征编码是用户准确定位的关键,如何设计简洁且不易产生误读的编码就成为了该定位方案的重中之重。
本文采用的栅格编码按照如下规则设计:完整的特征编码由起始码、信号源码和栅格坐标码组成,如图3所示。起始码位于特征编码的首位置,依靠其特殊的编码序列,用于从一串循环的特征编码序列中找到特征编码的起始位置,从而实现同步,避免误读;信号源码标识了用户所处的光源照射区,区分了用户所处的大区域;栅格坐标码标识了用户处于该光源下的具体栅格位置,实现了在大区域中的进一步精细定位。信号源码与栅格坐标码均隐含了用户的位置信息,因此被合称为信息码,用来标识用户位置。

图3 光源特征编码的结构和功能Fig.3 Structure and function of light source feature coding
起始码的编码序列较为特殊,以包含n位信息码的特征编码为例,其起始码设计位数也为n位,与信息码位数相等。这n位起始码的前半部分全为0(或1),后半部分全为1(或0),中间只存在1次0与1的翻转,翻转可以在中间任意位置,例如00111111,11111110,11110000等。按照这种方式设计的起始码形成了一段特殊的序列,该序列中只存在一次0和1的翻转,且翻转前后0或1的位数固定。完整的特征编码有2n位,由于受到长度限制,特征编码中不存在另一个满足1)序列中只有1次翻转;2)翻转前后0或1的位数是固定值的n位序列(除非信息码和起始码序列相同,但是这种情况下并不会影响信息码的正确读取)。因此,起始码可以有效地确定特征编码的起始位置,不会造成因起始位置不对而造成的误读。
信息码包含信号源码和栅格坐标码。信号源码的设计方式较为灵活,可以直接用二进制码对光源进行编号,也可以像栅格坐标码那样按照行列对光源进行编号。栅格坐标码由行编码和列编码组合而成,而行(或列)编码按照格雷码的编码方式,行(或列)号与其编码对应的关系如表1所示。对应于第7行第8列的栅格,其栅格坐标码为101100,其中101对应第7行,100对应第8列。由此规律可以得到全部的栅格坐标码(以8行8列为例),如表2所示。
基于以上规律设计出的特征编码具有以下优点:
1)特征编码与栅格位置对应简单直接,不需要采用几何计算的方式,定位方便快捷;
2)使用了起始码的特殊序列,可以准确地从一段任意位置开始的特征编码序列中找到起始位置,避免了误读;
3)栅格坐标码采用格雷码的编码方式,相邻栅格的坐标码只有1个位数发生变化,编码高度相似,因此当用户处于跨2个相邻栅格区时,仍可将用户位置的模糊度固定到这2个栅格区内,保证了定位的连续性和稳健性。

表1 行(或列)号与其编码的对应关系

表2 8×8栅格特征编码的栅格坐标码
3 实验验证
为了验证本文介绍的利用栅格光源特征编码的室内定位技术的可行性,在实验室中以投影仪代替LED光源,使用计算机控制投影仪输出闪烁信号光,模拟出在1个光源下的8×8栅格的定位区域。栅格特征编码的起始码设置为111000,由于仅存在1个光源,因此未设置信号源码,栅格坐标码按照表2中的8×8栅格特征编码的栅格坐标码设计,构成总长为12位的特征编码。在用户端,使用市售的华为荣耀8手机调用光敏传感器接收光信号。
3.1 将光强值转化为编码
在实验环境中进行5min的光信号接收,其光强值分布如图4和图5所示。
从图4和图5中可以看出,一段时间内的采样光强分布于高光强和低光强2个区域内,分别对应于光源的明和暗两种状态。但是由于环境的细微影响和实验设备的不稳定,明暗两种状态下的光强值并不固定,而是在某一中心值附近波动,数据量呈现从中心向外逐渐减少的分布特征。从图中可以看出,全部光强值均落入低光强区域(20~100)或高光强区域(480~580)。这两段区域的区域范围较小,同时,这两段区域有较大的空白间隔,界限十分清晰。对于全部数据,只需要设置一个合理的阈值,就可以确定光强采样值位于哪一个区域,进而准确地将光强值转化为01编码,不会产生对于编码的误判。

图4 采样光强值分布Fig.4 Sampling light intensity distribution

图5 各光强区间内数据个数占比Fig.5 The proportion of data in each light intensity interval
3.2 静态定位
将测试手机放置在(2,2)、(2,4)、(7,6)、(8,3)这4个不同栅格内,利用手机上的定位软件进行静态定位。将采集到的光强值输入到MATLAB中绘图,同时进行解码,得到的解码结果如图6所示。
4次数据均较好地完成了解码,没有出现异常情况。经过解码,再经过起始码111000的匹配,正确提取到的4个特征编码分别是111000001001, 111000001010, 111000101111, 111000100011。可以发现,在4个位置接收到的特征编码与4个栅格在表2中的特征编码完全一致,即静态时的定位解算完全正确。

图6 解码结果Fig.6 Decoding results
3.3 动态定位
在实验室环境下,控制用户端手机不断移动,同时利用手机上的定位软件实时进行解算,定位得到的轨迹与实际运动的轨迹如图7所示。

图7 动态轨迹对比Fig.7 Dynamic track comparison
图7中,阴影位置是手机端定位软件确定的用户位置栅格轨迹,黄色线条为测试手机的实际轨迹。通过对定位轨迹和实际轨迹的对比可以发现,在动态定位过程中,定位轨迹与实际轨迹在整体上吻合得很好,两者经过的栅格都相同。但是,受限于定位原理,用户位置只能被确定在某个栅格内,定位精度只能达到以栅格为最小单位的水平,而更加细微的位置信息是无法得到的,因此在一个栅格内部的定位与实际轨迹有所区别。利用栅格光源特征编码的室内定位技术定位精度在半个栅格,在实际使用中,可以通过改变光源分栅格的密度来控制栅格的大小,以保证满足用户所需的定位精度。
4 总结
本文介绍了一种利用栅格光源特征编码的室内定位方案,详细阐述了其编码原理以及定位实现过程。该方案定位原理简单,算法计算量小,同时该方案定位所需要的LED灯具广泛存在,成本极低,可满足应用推广的需要。实验证明,在理想条件下,该方案的定位精度达到半个栅格,定位准确度达到100%,可以满足室内定位的需求,具有可行性。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
重庆理工大学学报(自然科学)(2022年1期)2022-02-18
家庭影院技术(2021年9期)2021-11-05
导航定位学报(2021年4期)2021-08-29
北京航空航天大学学报(2021年5期)2021-06-09
上海工艺美术(2021年4期)2021-04-24
家庭影院技术(2021年2期)2021-03-29
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
