
非视距误差神经网络改正的超宽带定位模型研究
2020-06-08 04:50刘培原盛坤鹏韩厚增
导航定位与授时 2020年3期
刘培原,王 坚,盛坤鹏,韩厚增
(北京建筑大学测绘与城市空间信息学院,北京 102616)
0 引言
随着科技不断发展,人们越来越习惯使用手机等智能终端来获取自己所需要的位置信息,对于室内高精度定位的需求也日益增长。由于全球卫星导航系统(Global Navigation Satellite System,GNSS)在室内信号严重失锁而无法精确定位,于是基于各种传感器的室内定位技术应运而生,室内定位技术也得以飞速发展[1-2]。由于室内环境复杂, WIFI、蓝牙等传统的室内定位技术[3-5]在定位精度、覆盖范围及功耗上无法达到人们的要求,于是超宽带(Ultra-Wide Band,UWB)定位技术因具备穿透能力强、传输速率快和时间分辨率高等优点,在室内定位领域受到了很多国内外学者的青睐。由于UWB定位技术的时间分辨率高,所以常用基于时间差的方法来获取2个基站之间的距离,因此也经常会受到非视距(Non-Line-Of-Sight,NLOS)误差的影响。研究如何削弱UWB的NLOS误差的影响,成为现阶段急需解决的问题[6]。
UWB的NLOS误差对定位精度的影响极其严重,由于障碍物的存在,基站发射的信号通过折射、反射及穿透障碍物才能被标签接收。与视距(Line-Of-Sight,LOS)场景相比,增加了信号的传播时间,由d=(c×t)/2可知测距值大于实际距离,造成与真实位置的偏差[7-8]。在降低UWB的NLOS误差,提高定位精度的方法中,有很多学者提出了自己的见解。文献[11]提出了UWB/INS数据融合的室内定位方法,对组合定位系统的测量误差数据进行预处理,将UWB测距值进行线性拟合,抑制UWB定位中NLOS误差的影响。文献[12]基于UWB的室内协同定位方法,将UWB技术和协同定位技术相结合,引入最小二乘残差法剔除测距误差较大的节点,以提高系统的定位精度。文献[13]提出了自适应抗差Kalman滤波方法,利用LOS环境下的阈值构造抗差因子削弱NLOS测距误差,在此基础上推导了UWB定位的线性模型,再利用Kalman滤波方法来提高UWB的定位精度。文献[14] 提出了一种将UWB与行人航迹推算(Pedestrian Dead Reckoning,PDR)相结合的方法,并通过建立UWB与PDR的非线性扩展Kalman滤波器,来自适应地实现定位结果估计。文献[15]提出了一种伪距差分法来提升室内NLOS的定位精度,即通过阐述信号传播特性和测距数据处理方法, 推导出一种基于几何关系的定位算法。文献[16]提出了一种基于改进Kalman滤波的动态定位方法。该方法首先利用线性拟合剔除测距信息中的标准偏差,将改正后的测距信息作为改进Kalman滤波的量测信息,通过设定阈值调整Kalman滤波增益,从而剔除NLOS误差。
在室内环境下,信号容易受到墙面的阻隔和反射,从而影响UWB节点的定位精度,因此研究如何在NLOS环境下提升UWB的定位精度具有重要的意义。由于室内环境非常复杂,使UWB在测量时产生的NLOS误差来源众多,所以现有的大部分方法存在应用范围较窄、改正精度较差等问题。人工神经网络具有自适应学习功能,对非线性数据的拟合能力很强,可映射任意复杂非线性关系,而且学习规则简单,较其他模型更便于计算实现。神经网络中的反向传播(Back-Propagation,BP)算法具有很强的函数复现能力,因此,为提高NLOS环境下UWB的定位精度,本文提出了通过自主学习的反向传播神经网络(Back-Propagation Neural Network,BPNN)预测方法,建立了UWB的NLOS误差改正模型,并将该模型和多项式拟合模型以及多面函数拟合模型进行对比实验。实验结果表明,该模型的稳定性更高,可应用范围更广,精度更高。
1 UWB传播的NLOS误差模型
在LOS下的测距模型中,建模表达式为式(1)和式(2),其中Trelay表示设备响应延迟时间,Td表示脉冲信号在标签和基站中本身的固定时间附加延时误差,以及环境中温度和湿度等条件引起的误差,这两项误差被并称为标准偏差,记为TSD。
(1)
(2)
当标签和基站之间电波传播的LOS路径被遮挡时,电波只能以反射、折射、衍射等NLOS传播方式进行传播,在此情况下除了有标准偏差以外,测量值中还会产生一个附加超量延时,这个延时带来的误差值被称为NLOS误差。由于增加了传播时间,所以最终会导致测定距离比实际距离大,在NLOS环境下,NLOS误差被认为是一个正值的随机变量,在较为复杂的室内环境中,NLOS误差将会更加明显。NLOS环境下的测距表达式为式(3),其中Lk(ti)为标签与基站之间的真实距离,εk为标准偏差,nk(ti)为NLOS误差。
Lk(ti)=dk(ti)+εk+nk(ti)
(3)
由墙面阻隔造成NLOS误差的原理图如图1所示,提取某个点位的UWB的NLOS测距值与LOS测距值以及真值的描述如图2(a)所示,UWB的NLOS误差与LOS误差的对比如图2(b)所示。从图中可以看出,UWB的NLOS能够对测距精度产生极大的影响。

图1 非视距误差原理图Fig.1 Schematic diagram of non-line-of-sight error

(a)非视距测距值、视距测距值和真值对比

(b)非视距误差与视距误差对比图2 非视距误差测绘Fig.2 Non-line-of-sight error mapping
2 NLOS误差改正模型
NLOS误差是影响UWB的定位精度的主要原因,因此本文提出了基于BPNN的预测方法,通过建立函数模型优化测距值来对NLOS误差进行分析,并对比了BPNN模型与多项式拟合模型和多面函数拟合模型的精度提升效果。以下对BPNN模型进行介绍。
2.1 BPNN模型
BPNN能学习和储存大量的输入—输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。其在输入和输出端建立了一种高度非线性的映射关系,如图3所示。神经网络通常由输入层(x1,x2,…,xm)、输出层(y1,y2,…,ym)和隐含层构成,层与层之间的神经元采用全互连的方式,每层的神经元之间不连接。通过调整BPNN的连接权值和网络的规模 (包括输入输出和隐含层节点数),可以任意精度逼近任何非线性函数。BPNN算法步骤如下。
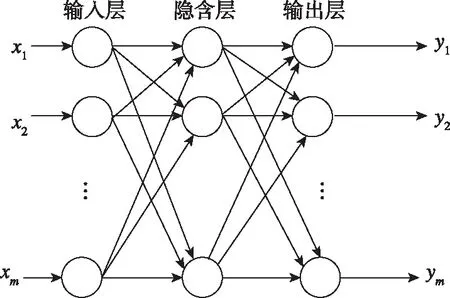
图3 典型BPNN模型Fig.3 Typical BPNN model
1)给定数据点集合{(xi,yi),i=1,2,…,n},作为神经网络的训练样本集。
2)输入层i神经元输出为式(4)
yi=f(xi)
(4)
隐含层h神经元输入为式(5)
Ih=ΣnwhiIi+θi
(5)
式中:whi是神经元之间的连接权值;θi是神经元的阈值。
隐含层h神经元输出为式(6)
yh=f(lh)
(6)
3)计算输入层j神经元的输入为式(7)
Ij=ΣnwjhIh+θi
(7)
式中:wjh是神经元之间的连接权值;θi是神经元的阈值。
真实输出值为式(8)
yj=f(Ij)
(8)
4)计算输出误差,见式(9)
(9)
5)重新计算并改正输出层和隐含层的权值以及阈值。
6)判断初始样本是否训练完毕,如果不满足条件,就选取新的样本继续训练,继续进行第二步;如果满足的话,就进行下一步。
7)计算神经网络的误差总和,见式(10)
(10)
判断E是否小于误差ε,如果满足条件就结束训练,不满足的话就判定是否达到指定的训练次数;若达到指定的训练次数就结束训练,未达到就返回到第二步继续进行实验,直到满足条件。其学习过程如图4所示。

图4 神经网络学习过程Fig.4 Neural network learning process
在本文的BPNN中,给定数据点集合{(xi,yi),i=1,2,…,n},作为神经网络的训练样本集。由于输入样本为2维的输入向量,因此输入层一共有2个神经元;网络只有1个输出数据,因此输出层只有1个神经元。选取其中85%的数据作为训练数据,15%的作为验证数据,输入样本后经神经网络不断进行迭代,逐渐调整网络各层的权值和阈值,使总的误差向减小方向变化,直至达到设定误差性能。学习过程结束,最后可得到BPNN预测的模型。
2.2 多项式曲面拟合模型
NLOS环境下UWB脉冲信号穿过障碍物造成测距误差,顾及入射角度,将测距值拆分成2个分量x和y,建立曲面拟合模型降低测距误差,可得式(11)和式(12)
(11)
(12)
其中,α为入射角度,d为基站和标签之间的距离,x、y分别为测距值在X、Y轴上的距离分量。
多项式曲面拟合模型的一般模型为式(13)
ξ=ψ(x,y)+ε
(13)
式中,ξ为测距异常,ψ(x,y)为ξ的趋势值,ε为误差。构建曲面拟合函数,可表示为式(14)
ψ(x,y)=a0+a1x+a2y+a3x2+a4xy+a5y2
(14)
式(12)写成矩阵形式为
ξ=AX+ε
(15)
式中
通过最小二乘间接平差计算,可以求得参数阵X,最后得到拟合二次曲面ψ(x,y)。
2.3 多面函数拟合模型
多面函数拟合模型的一般形式为式(16)
(16)
其中,K为参数,Q(x,y,xi,yi)为核函数。文中选正双曲面作为核函数,其函数式为(17)
(17)
式中:(xi,yi)为核函数的中心点。
建立拟合模型:ξ=ψ(x,y)+ε,写出误差方程:V=QK-ξ,矩阵形式为式(18)
(18)
通过最小二乘间接平差计算,可以求得参数阵K,最后得到多面函数拟合模型ψ(x,y)。
3 Kalman定位模型
Kalman滤波算法适用于解决噪声为高斯噪声的线性问题,且将Kalman滤波技术应用到无线定位技术中能够有效达到动态跟踪定位的效果。
标准Kalman滤波的矩阵形式的状态方程为
Xk=FXk-1+ωk
(19)

那么UWB定位系统的量测方程为
Zk=HXk+Vk
(20)
式中:Zk为量测向量;H为量测矩阵;Vk为量测噪声量,Vk的协方差矩阵为Rk,且有
(21)

基于式(16)和式(17),UWB室内定位系统为线性系统,其标准Kalman滤波算法预测过程为
(22)
更新过程为
(23)

4 精度评定
4.1 NLOS误差精度评定
测距精度评定指标一般要用到绝对误差和相对误差。误差的绝对值称为绝对误差(Absolute error),本文记作Δ。绝对误差与真值之比,称为相对误差(Relative error),本文记作μ。绝对误差与相对误差的计算公式分别为式(24)和式(25)
Δ=X*-X
(24)
(25)
式中:X为基站和标签间的真实距离;X*为基站和标签间的NLOS测距值。
4.2 定位精度评定
本文选取均方根误差指标评定测距误差改正前后的定位精度,均方根误差公式为
(26)

5 技术路线
NLOS误差的UWB定位的研究主要从数据后处理方面入手。基于这一认识,本文通过BPNN算法建立了误差改正模型对UWB的NLOS的测距和定位精度进行研究。首先根据测距误差进行拟合计算,建立误差改正模型;再提取检核点数据信息,根据模型计算测距和定位误差,实现UWB在NLOS环境中测距和定位精度的提升。技术路线如图5所示。
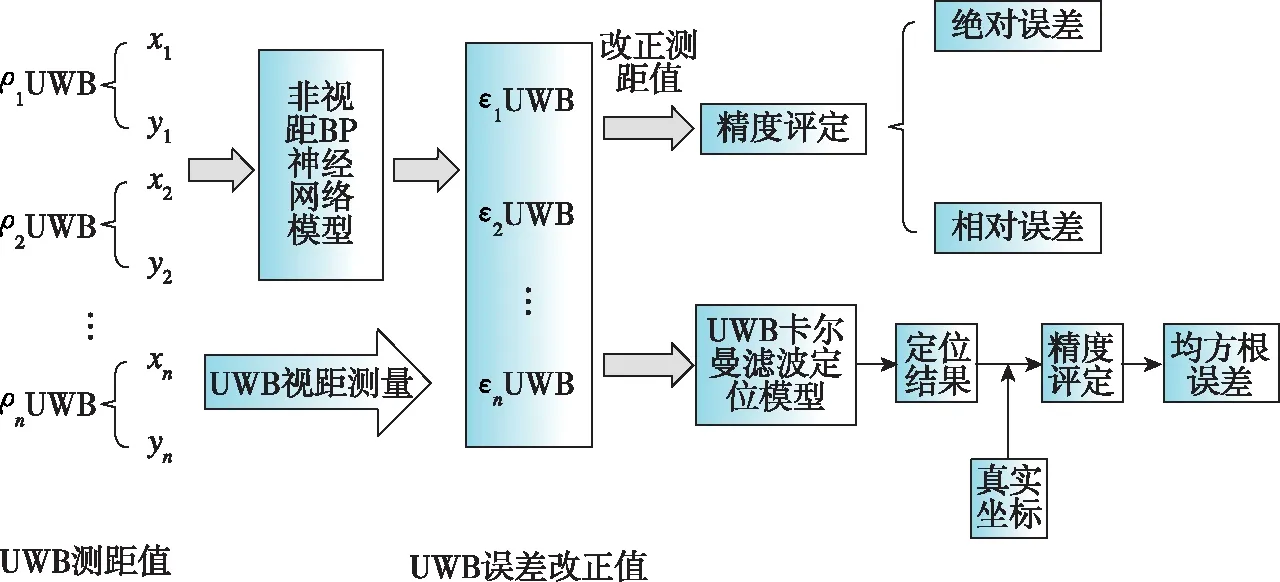
图5 考虑非视距误差的超宽带定位技术路线Fig.5 UWB positioning technology considering non-line-of-sight error
首先通过采集数据,统计得到49个测试点位的测距误差均值,选取其中5个点位作为检核点,不参与建模。BPNN采用一般设计原则,经测试,中间神经元个数选择为4个时预测精度最好。把参与训练的44个点位数据输入到BPNN训练函数中,神经网络通过不断调整权值和阈值,使网络模型的误差平方和最小,最终完成学习得到预测结果。把5个检核点的数据代入构建成功的改正模型中,经过计算可以得到检核点的误差改正值。使用误差改正值对5个检核点进行测距改正,将改正后的测距值用于Kalman滤波定位模型,可计算得到检核点的定位信息。统计经改正前后的绝对误差和相对误差进行测距精度评定,统计定位改正后的均方根误差进行定位的精度评定。最后对比分析BPNN模型和多项式曲面拟合模型、多面函数拟合模型测距和定位的精度提升效果,最终得出结论。
6 实验验证
文章实验采用基于UM100核心模块的UWB产品,实验场景为8m×12m的实验室内。基站设置在距墙体1m处的走廊里,标签放置在实验室内设计7m×7m的方格阵上,保持基站与标签在同一水平面内,将走廊的墙体作为遮挡物,使基站和标签无法通视,模拟NLOS环境,实验总体设计图见图6。实验场景见图7。实验内容为根据建立的相对坐标系求出49个测试点的坐标值及真实距离,49个测试点的各数据值如表1所示。
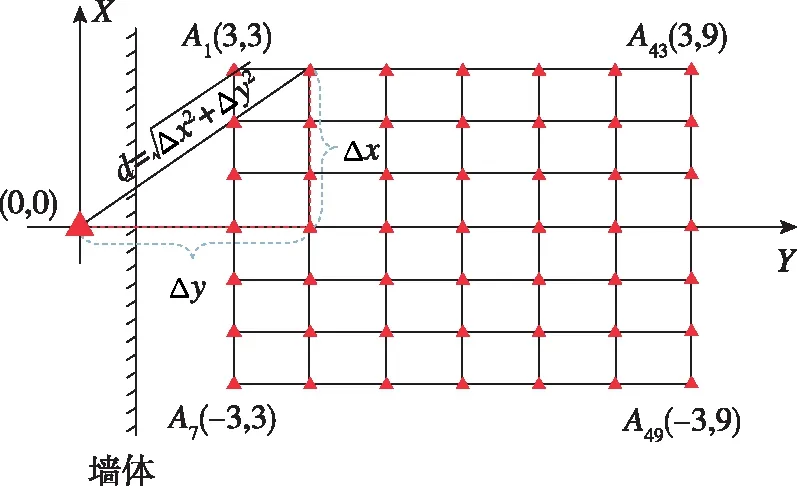
图6 实验总体设计图Fig.6 Overall design of the experiment

图7 实验数据采集现场Fig.7 Experimental data collection site
表1 49个测试点位数据统计表
Tab.1 Statistics of 49 test points

点号实际距离/m测距均值/m测距误差/mA14.245.110.87A23.614.160.55A33.164.080.92A43.003.530.53A53.163.740.58A63.614.330.72A74.245.210.97A85.005.450.45A94.474.990.52A104.124.560.44A114.004.530.53A124.124.840.72A134.475.130.66A145.005.450.45A155.836.140.31A165.395.730.34A175.105.480.38A185.005.360.36A195.105.680.58A205.395.910.52A215.836.360.53A226.716.940.23A236.326.590.27A246.086.550.47A256.006.760.76A266.086.640.56A276.326.880.56A286.717.230.52A297.628.500.88A307.287.740.46A317.077.750.68A327.007.940.94A337.077.530.46A347.287.960.68A357.627.950.33A368.549.080.54A378.258.590.34A388.068.740.68A398.008.390.39A408.068.430.36A418.258.660.41A428.548.950.41A439.499.820.33A449.229.600.37A459.069.690.62A469.009.430.43A479.069.460.40A489.229.670.44A499.4910.110.61
注:A16、A18、A30、A32、A34为本文检核点。
采集这些点位的NLOS测距值,每点位采集300个历元,采样频率1Hz。统计各点位的测距平均值和测距误差,实验场景见图7。A16点300历元的NLOS原始观测序列如图8所示。

图8 A16点非视距测量原始观测值Fig.8 Original observation value of non-line-of-sight measurement at point A16
6.1 NLOS误差改正
1) BPNN预测
BPNN模型采用学习率可变的最速下降BP算法进行学习,选择观测数据解算得到的坐标序列为训练样本进行误差神经网络模型的构建。中间层神经元选择为4个,按照BPNN的一般设计原则,中间层神经元的传递函数为S型正切函数,输出层神经元的传递函数设定为S型对数函数,对测距误差进行预测。网络输入端为测距的x和y方向分量,输出端为测距误差。神经网络迭代145次达到精度要求。图9所示为BPNN的训练状态,图10所示为误差的下降曲线,图11所示为神经网络的预测输出。
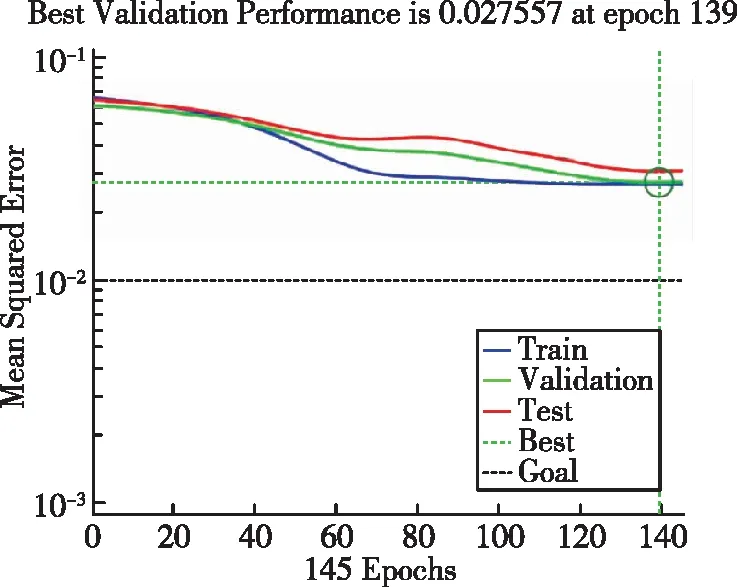
图9 BPNN的训练状态Fig.9 Training state of BPNN

图10 误差下降曲线Fig.10 Error decline curve

图11 BPNN预测输出Fig.11 BPNN prediction output
2)多项式曲面拟合
根据数据构建多项式曲面拟合模型得出测距值与测距误差的函数关系,拟合图形如图12所示。
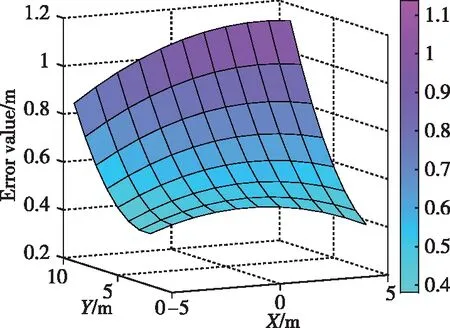
图12 多项式曲面改正模型Fig.12 Polynomial surface correction model
从图12可以得出,基于多项式曲面拟合模型下的图形满足同入射角度、同测距值的测距误差近似相同的规律;Y轴方向的测距误差随距离的增大逐渐累积,但Y轴两侧的测距误差却出现递减趋势,这违背了UWB信号强度随距离衰减的基本规律。
3)多面函数拟合
综合考虑核函数、平滑系数、核点个数、核点位置4个影响因素,经过试验选用得到残差相对较小的多面函数拟合结果;根据数据构建多面函数拟合模型得出测距值与测距误差的函数关系,拟合图形如图13所示。

图13 多面函数拟合模型Fig.13 Polyhedral function fitting model
从图13可以得出,多面函数模型拟合的曲面也大致遵循等入射角度、等测距值的测距误差近似相同的规律;Y轴方向及两侧的测距误差随距离的增大逐渐累积,符合UWB信号衰减的基本规律。
4) NLOS误差精度评定
接下来选取A16、A18、A30、A32、A34点来验证三种模型对测距值的改正效果,统计检核点测距值改正前后的绝对误差和相对误差。各检核点的数据如表2所示。

表2 检核点的数据统计表
表2中的实际距离为基站与标签之间的真实值,改正前测距值为基站与标签之间的NLOS测距值,改正后测距值为多项式曲面模型改正后的测距值。从表2可以看出,5个检核点的NLOS测距值与实际距离相差50~100cm不等,说明NLOS环境对UWB测距精度的影响较为严重。选用拟合模型进行改正后,检核点的测距误差从分米级缩小到厘米级。从表2中可以看出,BPNN模型较多项式拟合模型A16点测距精度提高52%,A18点测距精度提高44%,A30点测距精度提高65%,A32点测距精度提高28%,A34点测距精度提高45%;BPNN模型较多面函数拟合模型A16点测距精度提高11%,A18点测距精度提高16%,A30点测距精度提高41%,A32点测距精度提高28%,A34点测距精度提高45%,如图14所示。由此可见,通过误差改正模型改正后可以降低该布设范围内的NLOS测距误差,但由于多项式曲面拟合和多面函数拟合存在函数较为固定、参数较少等内在的局限性,导致部分点位的测距误差的改正效果不理想。采用BPNN模型改正后,测距误差改正效果得到提升,测距精度均可提高60%以上,不会出现拟合模型进行改正后某些点改正不明显的情况,改正效果更加稳定,测距精度改正效果显著。
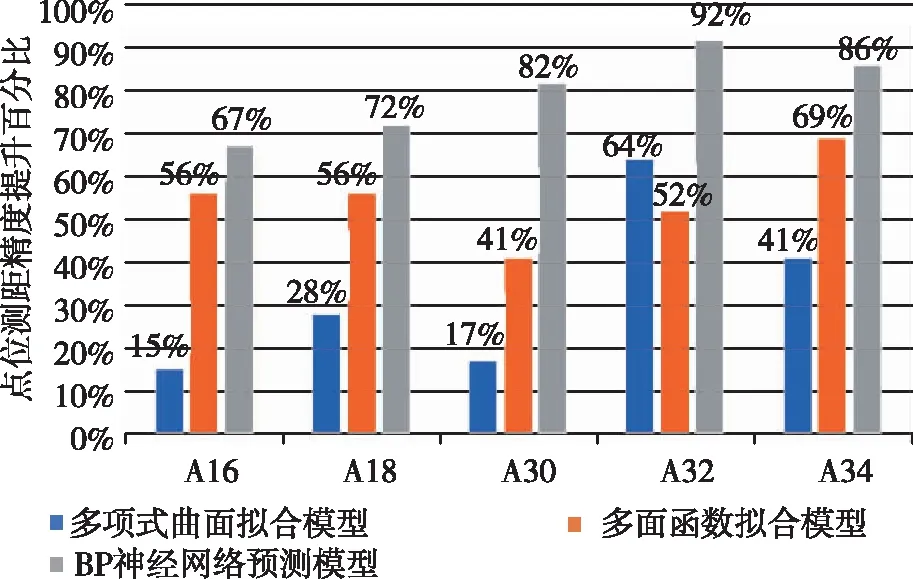
图14 点位精度提升百分比Fig.14 Point accuracy improvement percentage
6.2 定位模型验证
定位实验使用4个基站进行定位。在NLOS基站保持不动的基础上,再添加3个LOS环境下的基站,且保持添加的3个基站与原有NLOS基站高度一致,均为2m,使本实验中4个基站处于同一水平面上,在二维平面上分析NLOS测距误差的分布规律,实验示意图如图15所示。然后对布设好的未参与拟合的5个检核点进行定位实验,每个点位采集数据约300个历元,分析利用测距误差改正模型进行NLOS测距改正前后的定位结果。

图15 定位基站布设图Fig.15 Layout of positioning base station
1) 定位误差改正
提取A16、A18、A30、A32、A34这5个点坐标序列,分别通过BPNN预测模型、多项式曲面拟合模型和多面函数拟合模型进行改正,提取经BPNN改正后A16点位X和Y方向误差序列如图16所示,绘制A16点定位解算值和真值图像如图17所示。统计改正前后坐标如表3所示,改正前后X和Y方向坐标偏差如表4所示。从表中可以看出,多项式拟合模型在X和Y方向的定位精度分别提升25.3%和54.3%;多面函数拟合模型在X和Y方向的定位精度分别提升57.6%和57.5%;BPNN预测模型在X和Y方向的定位精度分别提升66.7%和83%。

(a)BPNN模型改正后X方向误差序列

(b)BPNN模型改正后Y方向误差序列图16 A16点BPNN改正后X和Y方向误差序列Fig.16 Error sequence in X and Y directions after point A16 BPNN correction

(a)原始定位结果

(b)BP模型定位结果

(c)多项式定位结果

(d)多面函数定位结果
表3 检核点位坐标统计表
Tab.3 Check point coordinates statistics

点号真实坐标/m定位坐标/mBPNN预测/m多项式曲面拟合/m多面函数拟合/mA16(2,5)(2.24,5.20)(2.08,5.05)(1.83,4.80)(1.91,4.89)A18(0,5)(0.21,5.28)(0.07,5.08)(-0.38,4.85)(-0.22,4.89)A30(2,7)(2.37,7.45)(2.15,7.06)(1.59,6.78)(1.82,6.88)A32(0,7)(0.54,7.70)(-0.15,6.93)(-0.18,6.98)(0.17,7.26)A34(-2,7)(-1.69,7.51)(-2.12,7.08)(-2.37,6.83)(-2.11,7.18)

表4 改正后坐标偏差
2) 定位精度评定
根据本文精度评定方法,经计算得到3种误差改正模型改正后的均方根误差,并进行对比分析,如表5所示。
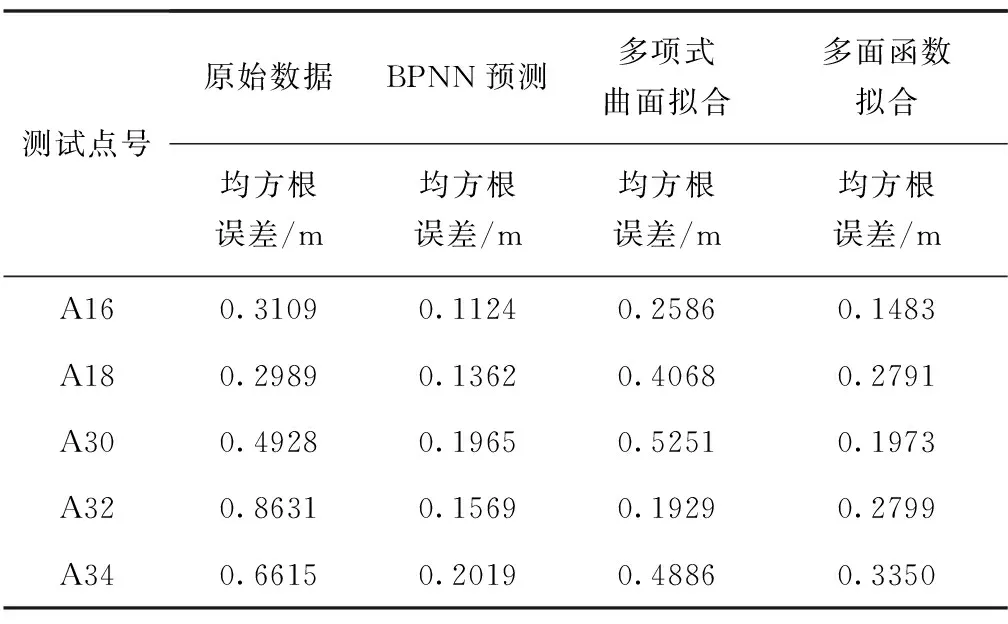
表5 定位精度评定
从表5可以看出,5个检核点经过拟合模型改正后,均方根误差值明显减小。BPNN模型较多项式曲面拟合模型A16点定位精度提高46%,A18点定位精度提高47%,A30点定位精度提高77%,A32点定位精度提高4%,A34点定位精度提高43%;BPNN模型较多面函数拟合模型A16点定位精度提高11%,A18点定位精度提高55%,A30点定位精度提高31%,A32点定位精度提高14%,A34点定位精度提高20%,如图18所示。由以上数据可以看出,本文提出的BPNN预测改正模型的改正效果较好,且较为稳定,可以把NLOS状态下的误差基本改正到接近LOS状态,定位的均方根误差在30cm之内,基本接近于LOS情况,有效提高了定位精度。

图18 定位精度提升百分比Fig.18 Positioning accuracy improvement percentage
7 结论
随着室内定位的广泛应用,提升室内定位精度已经成为我们必须要解决的问题,NLOS误差也是室内定位误差的主要来源。针对NLOS环境对UWB定位精度的影响,本文提出了一种NLOS误差BPNN改正的UWB稳健定位模型,实验结果表明:
1) 在实际的室内环境中,影响因素更为复杂,本文提出的NLOS误差BPNN改正的UWB稳健定位模型可以根据不同环境的数据自适应学习,映射其中复杂的非线性关系,而且学习规则简单,较其他模型更便于计算实现。
2) 本文模型的改正结果更为稳定,其中较多项式拟合模型UWB测距精度提高46.8%,定位精度提高43.4%;较多面函数拟合模型UWB测距精度提高28.2%,定位精度提高26.2%。可以看出,本模型较其他方法具有明显的优势。
3) BPNN的算法还存在局限性,BPNN结构的选择至今尚无一种统一而完整的理论指导,一般只能由经验选定。网络结构选择过大,训练中效率不高,可能出现过拟合现象,造成网络性能低,容错性下降;若选择过小,则又会造成网络可能不收敛。未来可以进行改进BP算法的研究,建立改进的模型来提高UWB室内定位的精度。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
航天返回与遥感(2021年6期)2022-01-11
全球定位系统(2021年4期)2021-09-14
导航定位学报(2021年4期)2021-08-29
电子产品世界(2021年8期)2021-01-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
中国计算机报(2019年49期)2019-02-07
