
基于差动共焦显微技术的微区拉曼光学系统构建与实验研究
2020-05-29 08:48姜静子高思田连笑怡
计量学报 2020年4期
姜静子, 高思田, 黄 鹭, 李 琪, 连笑怡
(1. 浙江理工大学 机械与自动控制学院,浙江 杭州 310018;2. 中国计量科学研究院,北京 100029)
1 引 言
基于拉曼散射原理,微区共焦拉曼光谱技术通过显微物镜将光聚焦到样品表面微小区域进行光谱探测[1,2]。应用该技术的光谱探测系统不仅保持了传统显微技术的图像获取功能,还具备探测物体表面微小区域拉曼光谱信息的能力,可广泛应用于矿物分析、材料学、生物技术等领域[3]。
目前,常用的拉曼光谱技术有表面增强拉曼光谱技术、傅里叶变换拉曼光谱技术、激光共振增强拉曼光谱技术等[4]。
应用表面增强拉曼光谱技术的探测系统具有增强基底稳定性差、易损耗的缺点;应用傅里叶变换拉曼光谱技术的探测系统容易产生温度漂移并且试样移动范围小;应用激光共振拉曼光谱技术的探测系统具有荧光干扰严重的缺陷[5~7]。利用上述技术研制装置较为困难、并且要求具有测试条件严苛的光谱探测系统;而应用微区共焦拉曼光谱技术的光谱探测系统具有整体结构简单,测量实验操作简便,试样移动范围广等优点。但是,传统的共焦拉曼光谱探测系统没有强调系统的定焦能力,导致实际光谱探测位置往往处于失焦位置。即便光线在失焦位置也能激发出样品的拉曼光谱并被探测,故拉曼光谱信号强度不能被合理表征,无法获得高质量的光谱探测图像。
本文基于激光差动共焦拉曼光谱测量方法[8~10],利用光纤芯径代替传统的物理针孔,进而研制并构建了一套激光差动共焦拉曼光谱测量系统装置,该系统通过先定焦、再测量的实验测量方式,得到了高质量微区拉曼光谱探测图像,并简化了系统装置的结构。
2 微区共焦拉曼光谱光路
微区拉曼光谱探测光路如图1所示。图1中:1为激光发射单元;2为二向色分光单元;3为光谱激发单元;4为光谱探测单元。

图1 光谱探测部分光路原理图
光路工作原理如下:
激光发射单元中,单纵模激光光源融合单透镜空间耦合技术射入光纤,从光纤另一端面射出,经过准直器,入光光阑,径向偏振光转换器,反射镜,透射镜,进入偏振分光镜。偏振分光镜将光分为两路,一路S偏振光被滤除;另一路P偏振光经过反射镜先到达二向色分光单元。该单元核心元件是二向色镜,选用Semrock532nm单陷波滤波镜,其在60nm陷波带中实现全反射,可滤除从样品表面反射回光路中的瑞利散射光,透射样品表面激发的拉曼散射光,实现拉曼散射和瑞利散射的无损分离。
图2为单陷波滤波镜不同波长滤波曲线,从图2中可以看出:二向色镜在507.5~570 nm范围内透射率接近于0,这表明该波段内的光经过二向色镜实现全反射;波长<507.5 nm及波长>570 nm的拉曼散射光的透射率>93%。物质拉曼散射产生的拉曼频移较接近激发光频率,上述二向色镜实现窄带滤波,可以达到系统测量需求。
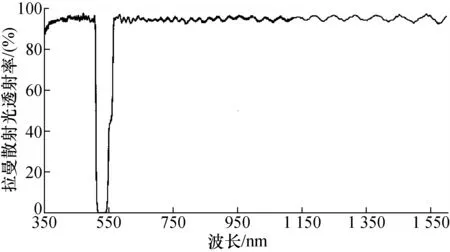
图2 单陷波滤波镜不同波长滤波曲线Fig.2 Filtering curves of single pass filter with different pass wavelengths
光谱激发单元核心元件物镜选用三丰M PLAN APO HR物镜镜头,分辨力为0.4 μm,数值孔径NA=0.75,工作距离为5.2 mm。该物镜在较长工作距离的基础上具有较高的数值孔径,可以增加系统测量的适用性。
光谱探测单元中,拉曼散射光先经过单透镜空间耦合进入多模光纤。然而,在光束射入光纤时,入射角应小于将在纤芯界面发生全反射的临界角,否则光束会射到光纤包层介质中产生衰减。该临界角即光纤接收半角θacc。根据斯涅耳定律可以计算出:
(1)
(2)
式中:θcrit为临界角;ncore为纤芯的折射率;nclad为光纤包层的折射率;n为外部介质的折射率;θacc为光纤的接收半角。
可以根据制造商提供的光纤数值孔径来计算出θacc,该方法得到结果更为准确,其表达式为
(3)
已知Thorlabs M200L02S-A多模光纤的NA=0.22,对于空气n≈1,则θacc≈12.7°,可以得出入射角应<12.7°,选择NA=0.143,入射角≈8.3°(<12.7°)的ThorlabsASL10142M-A非球面透镜与之相匹配,进行空间光耦合,减少空间光路中杂散光进入多模光纤的概率,提高拉曼散射接收效率。光束再通过光纤另一端面射出,经过准直器、夹持聚光镜的狭缝接口盒,射入拉曼光谱仪。在拉曼光谱仪前加入狭缝接口盒是为了减少荧光背景噪声对光谱探测信号产生的影响,提高光谱信号的信噪比[11]。
拉曼光谱探测选用ActonSP2300拉曼光谱仪和Pylon液氮制冷CCD。ActonSP2300拉曼光谱仪精度达0.2 nm,重复性为0.05 nm,配合分辨力为0.14 nm、制冷温度为-120 ℃的深度制冷降噪CCD使用,可以探测到200 ~1 200 nm范围内微弱拉曼散射信号,达到系统探测要求。
3 差动共焦光路
为了实现差动定焦功能,基于差动共焦测量原理进行了光路设计,如图3所示。其主要由二向色分光单元1、光谱激发单元2、共焦显微成像单元3及差动共焦探测单元4部分组成。
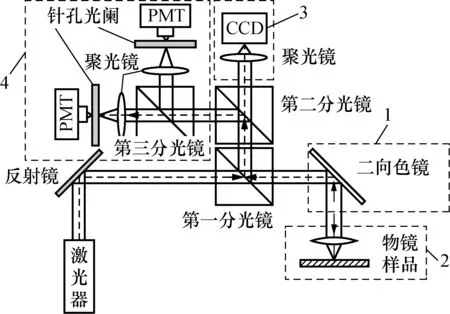
图3 差动共焦定位部分光路原理图
光路工作原理如下:
激光器发出的光通过反射镜、分光镜,经过二向色镜反射进入光谱激发单元,由显微物镜聚焦到待测物表面,形成点照明;被测面将照明光束返回光路中,经过二向色镜、第一分光棱镜的反射,进入第二分光棱镜。第二分光棱镜将光分为两路,一路进入显微成像单元,通过聚光镜在CCD像面成像,另一路进入差动共焦探测单元,该单元加入了针孔光阑,其与探测器结合形成点探测。差动共焦测量原理能够反映出物体离焦平面的轴向位移信息,具有很好的纵向层析能力[12~14]。
共焦显微测量理想轴向光强分布表达式为:
(4)
式中:u为物体偏离焦平面位移;I0为几何焦点处的光强信号;λ为波长;k为波数,k=2 π /λ;NA=sinα。
根据共焦显微测量轴向响应函数可以推导出差动共焦测量信号的轴向响应曲线。由于在差动共焦单元中,光经过第三分光棱镜分为两路,故其包含两路光强信号。两路信号分别通过聚光镜、针孔光阑进入两个探测器。将这两个针孔光阑分别放置在物镜像焦平面前后对称的位置处,在景深范围内轴向移动物镜,可以得到两条形状相似但轴向位置略有偏移的差动共焦测量信号轴向响应曲线。对这两条曲线作差,得出聚焦误差信号曲线,利用该曲线可以实现差动共焦测量[15,16]。
理想聚焦误差信号表达式[17,18]为:
Idiff=I(u,ui)-I(u,-ui)=
(5)
式中:ui和-ui为设置的针孔光阑距离物镜像焦平面的位移;I0为几何焦点处的光强信号。
基于公式(5)的原理,在系统中使用AL1225M-A聚光镜、20 μm针孔光阑、PMM02光电倍增管等元件。其中,光电倍增管进行光电转化,转化后的电压信号采用同轴电缆与计算机通信。在计算机上使用自行编写的C++上位机软件同时采集两路电压信号并将两路信号相减,得到实际的差动聚焦误差信号曲线如图4所示,利用该信号曲线过零特性实现准确对焦。

图4 差动共焦轴向响应实测曲线
由图4中的Idiff曲线可以得出,在聚焦误差信号曲线过零处系统的探测灵敏度和轴向分辨率均较高。与此同时,根据聚焦误差信号曲线具有正负极性的特点,采用反馈控制技术,将其稳定在焦平面位置附近,实现系统长时间稳定的测量功能[19]。此外,系统进行多次单点定焦测量实验,得到重复性精度约为5 nm。
融合了微区共焦拉曼光谱光路与差动共焦光路的激光差动共焦拉曼光谱测量系统的总光路设计如图5所示。
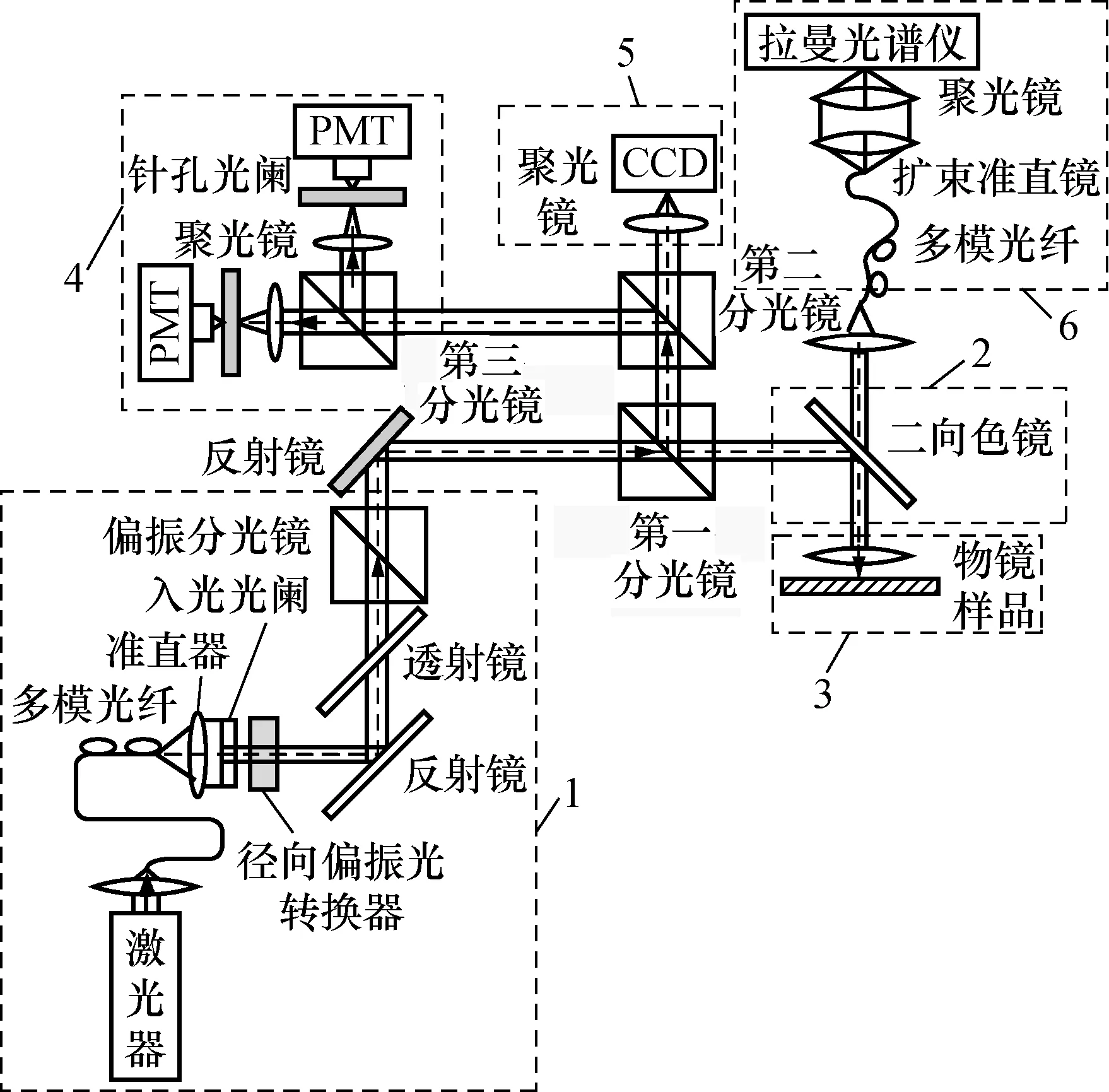
图5 激光差动共焦拉曼光谱测量系统总光路原理图
由图5可知,该光路由6个单元组成,同时具有拉曼光谱探测与激光差动共焦测量功能。其中,光谱探测单元将现有的激光差动共焦拉曼光谱成像仪器的探测针孔改用光纤来代替,大大简化仪器系统结构,提高了其环境抗干扰能力。光纤部分的设计比传统物理针孔结构设计更具有灵活性。
4 测量系统建立
根据总光路设计原理图研制并构建完成了微区拉曼光学系统。该系统装置结构示意图如图6所示。主要包括微区拉曼光谱探测模块、光电信号转化及信号采集模块、定位模块。
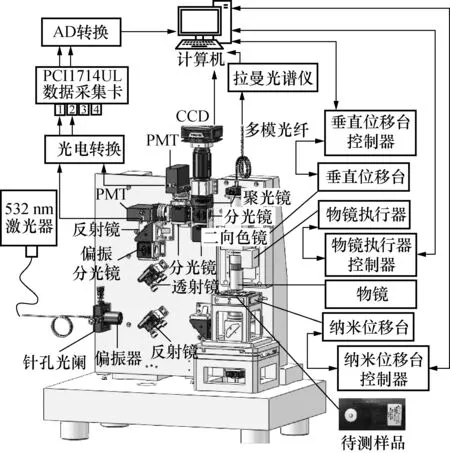
图6 系统装置结构示意图
微区拉曼光谱探测模块主要包括Thorlabs二向色镜、反射镜、分光镜、光源、物镜、Semrock二向色镜。其中光源采用300mW 532nm单纵模激光器,其输出稳定的单纵模光源,抗干扰能力强[20],可用于拉曼光谱探测。物镜采用三丰M PLAN APO HR型物镜,分辨率为0.4 μm,NA=0.75,工作距离为5.2 mm。物镜5.2 mm长工作距离有助于测量毫米级待测样品,增加系统测样范围;该工作距离下,物镜NA=0.75将光聚焦在样品表面微小区域,实现待测物微区拉曼光谱探测[21]。
光电信号转化及信号采集模块分为光电信号转化部分和信号采集部分。光电信号转化部分包括Thorlabs分光镜、聚焦透镜、针孔光阑、光电倍增管、低噪声电压源。Thorlabs公司生产的PMM02光电倍增管光集成了光电转化与电压放大功能,输出电压0~5 V。光信号由分光镜分为两路,经由两个聚光镜、两个20 μm针孔光阑到达两个光电倍增管探测面进行光电转化,低噪声电压源为光电倍增管提供电压增益,放大输出电压。
信号采集部分包括同轴电缆,数据采集卡、计算机。光电倍增管通过同轴电缆与嵌入计算机PCI插槽的数据采集卡进行通信。用自行编写的C++上位机软件同时采集两路电压信号并将两路信号相减,得到聚焦误差信号作为定位模块触发信号。
定位模块主要包括物镜执行器、物镜执行器控制器、物镜、垂直位移台、垂直位移台控制器、纳米为移台、纳米位移台控制器等器件。该模块实现垂直位移台粗调物镜位置和物镜执行器细调物镜位置两部分功能。垂直位移台选用PI公司生产的M-714.2HD纳米精度线性平移台,行程为7 mm,分辨率为2 nm,配合C-702混合驱动控制器使用。混合驱动控制器具有很高的驱动力和夹持力,其闭环反馈控制物镜垂直上下移动,粗调物镜位置,使其稳定在景深范围内[22~24]。
在景深范围内得到CCD成像图像,如图7所示。

图7 CCD成像图
图7可得出系统使用垂直位移台粗调部分功能已找到景深范围内接近焦平面的位置并在此位置上用物镜执行器对物镜进行精密细调。细调功能核心元件为物镜执行器及其控制器。镜执行器选用PI公司N-725.2a型号纳米调焦物镜驱动器[21],闭环分辨率1.25 nm,闭环线性度0.03%,最大推力100 N,配合E-509控制器使用。该控制器内嵌电容式位置传感器可以保持物镜出射的光斑长期稳定在焦平面,实现系统精准定位功能[22]。
样品微移动依赖于三维纳米位移台及其控制器。纳米位移台及控制器分别选用PI公司生产的P-733.3CL三维纳米位移台与E-500系列控制器。该位移台使用闭环控制时,分别进行分辨力为0.2 nm、0.2 nm、0.3 nm的x、y、z三轴精密运动,以便为后续样品的测量实验做准备。
5 测量实验
实验中所采用的样品是在真空状态下保存的固体纯物质硫、单壁碳纳米管。用自行研制的微区拉曼光学系统装置分别探测到得两个样品在焦点处的微区拉曼光谱图像,如图8和图9所示。

图8 单壁碳纳米管的拉曼光谱图
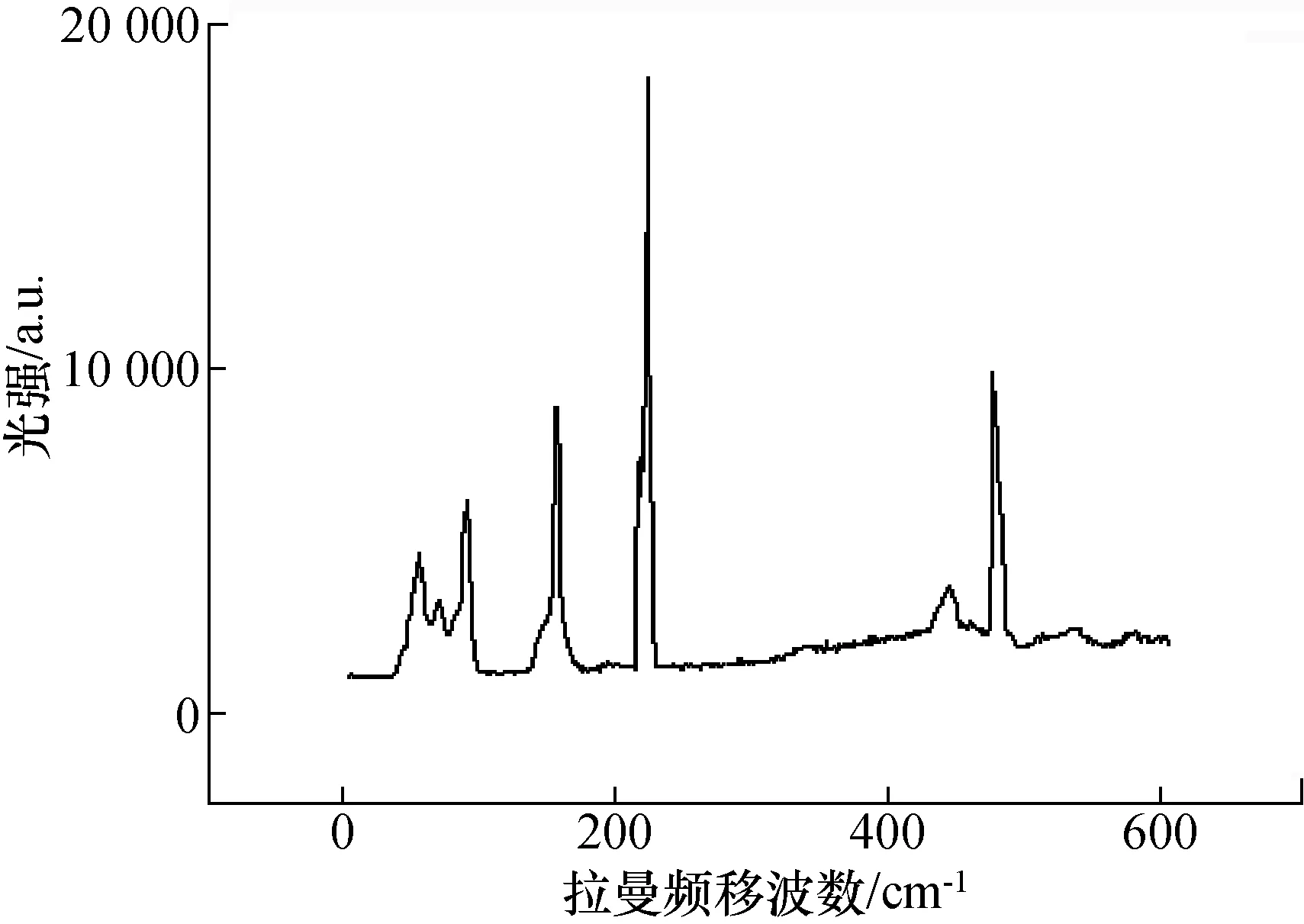
图9 硫的拉曼光谱图
由图8和图9可以看出:测出了单壁碳纳米管的1 581.51 cm-1、2 708.065 cm-1特征峰波数;测出了纯物质硫的153.113 cm-1、219.917 cm-1、473.322 cm-1特征峰波数;纯物质硫在最灵敏波数219 cm-1的峰的信噪比应大于100:1,该波数的峰对应的背景噪声为150 ICP,则探测信号强度应大于15 000 ICP[25],ICP为拉曼特征峰强度和该特征峰的背景噪声计算的信噪比。由图9可知,在波数219.917 cm-1的峰的信号强度为19 121 ICP大于15 000 ICP[26],故得出系统测量灵敏度高且探测到了光强合理的拉曼光谱。
本系统探测到纯物质硫、单壁碳纳米管的拉曼光谱与中国计量科学研究院校准后的拉曼光谱探测系统的探测结果见表1,对应特征峰的拉曼频移波数基本一致。
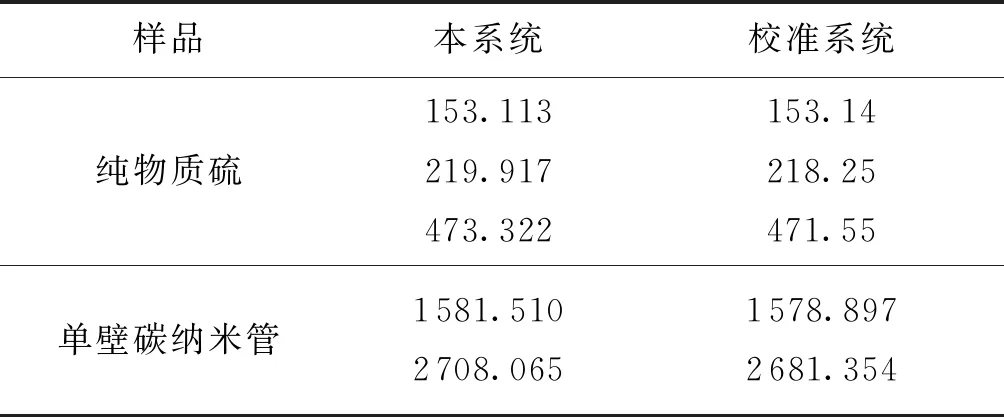
表1 两种样品拉曼频移波数
在实现单点检测的基础上,选取检测区域内某一条线进行测量实验。x-y面内测量线长40 nm,碳管覆盖区域在垂直中心线方向约为20 nm。利用自行编写的反馈控制软件,控制三维纳米位移台以 1 nm 为步长,在垂直中心线方向自上而下进行移动,与此同时,控制纳米调焦物镜驱动器进行纳米级精确对焦,使测量面长时间稳定在焦平面,得到单壁碳纳米管18 nm线长拉曼光谱测量图像。
由图10可知,测量系统在x-y面内实现单壁碳纳米管的单线检测,明显的特征峰出现在1 581.51 cm-1、2 708.065 cm-1的拉曼频移位置处。在检测区域垂直中心线方向0~40 nm长度范围内,碳管分布在10~28 nm线长范围内,其拉曼光谱强度随着碳管浓度提高而加强。
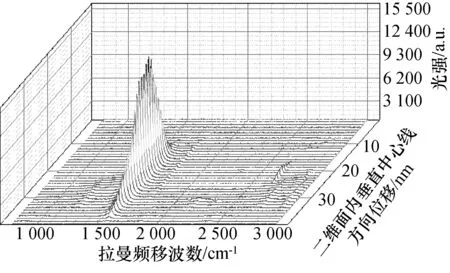
图10 单壁碳纳米管的线测量拉曼光谱图
6 结 论
本文基于微区共焦拉曼光谱技术与差动共焦显微技术,研制并构建了一套微区拉曼光学系统。该系统采用差动共焦过零响应特性,实现长时间准确定焦功能,有较高的系统稳定性;采用多模光纤空间耦合技术实现激光入射以及微区拉曼散射信号的收集,提高激发与收集效率;采用反馈控制技术实现了焦点处微区拉曼光谱探测且探测到了高质量纯物质硫和单壁碳纳米管的拉曼光谱图像,并编写反馈控制程序进一步实现了碳管拉曼光谱图像的单线检测。实验结果表明:该系统的光路、机械结构、控制软件设计合理,能满足高灵敏度、高稳定性的拉曼光谱测量系统的要求。
猜你喜欢
岩矿测试(2022年6期)2023-01-05
桂林电子科技大学学报(2022年3期)2022-10-26
华北理工大学学报(自然科学版)(2020年4期)2020-11-05
科学大众(2019年8期)2019-10-21
中国粮油学报(2018年12期)2018-03-19
教学考试(高考生物)(2017年4期)2017-12-13
刑事技术(2016年4期)2016-12-22
中学生数理化·八年级物理人教版(2015年11期)2015-11-30
科学中国人(2015年8期)2015-07-14
