
双电机耦合驱动电动汽车驱动模式划分与优化*
2020-05-09 08:53林歆悠伍家鋆魏申申
汽车工程 2020年4期
林歆悠,伍家鋆,魏申申
(1.福州大学机械工程及自动化学院,福州 350002; 2.汽车零部件先进制造技术教育部重点实验室(重庆理工大学),重庆 400054)
前言
增大新能源汽车的比例是降低交通运输能耗和排放的有效途径[1]。其中纯电动汽车因其零排放、低噪声、零油耗的特点受到广泛的关注[2]。但“里程焦虑”一直是其让消费者望而却步的因素之一[3]。因此提高纯电动汽车的经济性有利于其普及推广。
现有的纯电动汽车的驱动系统可分为单电机和多电机驱动系统,相比于单电机驱动系统,多电机系统中的双电机耦合系统能以多种模式运行,使各动力源的工作区域得以优化,从而可具有更优的经济性和动力性[4-6]。但是,工作模式的多样化也带来了划分工作模式和提高各个模式系统效率的复杂任务。
为提高驱动系统的效率,避免单纯的依靠工程师带来的规则盲区,多种优化算法被应用于控制策略的开发。例如,Zhang等[7]采用动态规划算法(DP)以最小能耗为目标对双电机耦合驱动系统的控制策略进行优化,得到了双电机系统的功率分配策略。Zhang等[8]采用庞特里亚金极小值原理(PMP)来优化转速耦合模式时动力系统的功率分配,实现了整车经济性的提高。胡明辉等[9]采用序列二次规划算法获得任意行驶工况下的最优效率,通过比较各模式的系统效率选择最优驱动模式。该类方法普遍应用于全局优化,可作为理想的标定方案,但它需要较精确的数学模型及复杂的运算,且实时计算成本较高,故较难用于实时控制。
除上述算法外,粒子群(APSO)算法[10-11]以其实现容易、精度高、收敛快等优点而被广泛应用于控制策略的优化。王钦普等[12]利用粒子群算法优化特定工况下的等效因子和起动车速,设计出了针对混合动力客车的高效能量管理策略。吴晓刚等[13]利用粒子群算法对模糊控制中的隶属度函数进行优化,提高了混合动力系统的燃油经济性。文献[14]中针对多电机电动车提出一种粒子群优化实时转矩分配策略,使各电机工作在高效区域,提高了驱动效率,不过该方法只考虑了驱动系统的效率,而不包括电池模型。
本文中以一款新型双电机耦合系统电动汽车(dual-motor coupling-propulsion electric vehicle,DMCP-EV)为研究对象,制定了基于PSO算法系统效率优化的驱动模式控制策略,在满足动力性要求的基础上提高了整车经济性。
1 双电机耦合动力系统模型
1.1 双电机动力系统构型介绍
该款新型耦合驱动系统如图1所示。在该耦合驱动构型中,电机M1与太阳轮S相连,电机M2与连接器T相连。制动器L1与太阳轮S同轴,当L1闭合时,太阳轮被固定,电机M1停止运行。制动器L2与齿圈R相连,当L2闭合时,齿圈R固定。减速齿轮G1与齿圈R相连,当连接器T位于右端时,三者相连接,随电机M2的运转而运行;当连接器T位于中间时,电机M2关闭;当连接器T位于左端时,两电机转矩在太阳轮C处耦合。
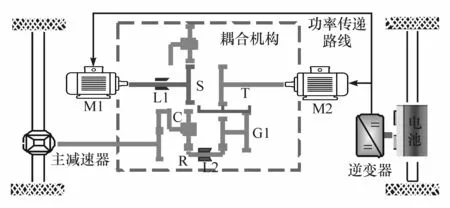
图1 新型双电机耦合系统构型
当汽车正常行驶时,整车控制器接受并处理来自传感器的信号,向电机控制器等执行器发出指令,通过控制连接器T及制动器L1、L2的开闭,使动力系统工作在不同的工作模式:电机M1单独驱动模式(定义为SM1)、电机M2单独驱动模式(定义为SM2)、双电机转矩耦合模式(定义为TC)、双电机转速耦合模式(定义为SC)以及再生制动模式。由于本文重点研究的是驱动系统的驱动性能,故在此暂不考虑再生制动的控制。本文中所研究的某款纯电动汽车的具体动力部件参数见表1。
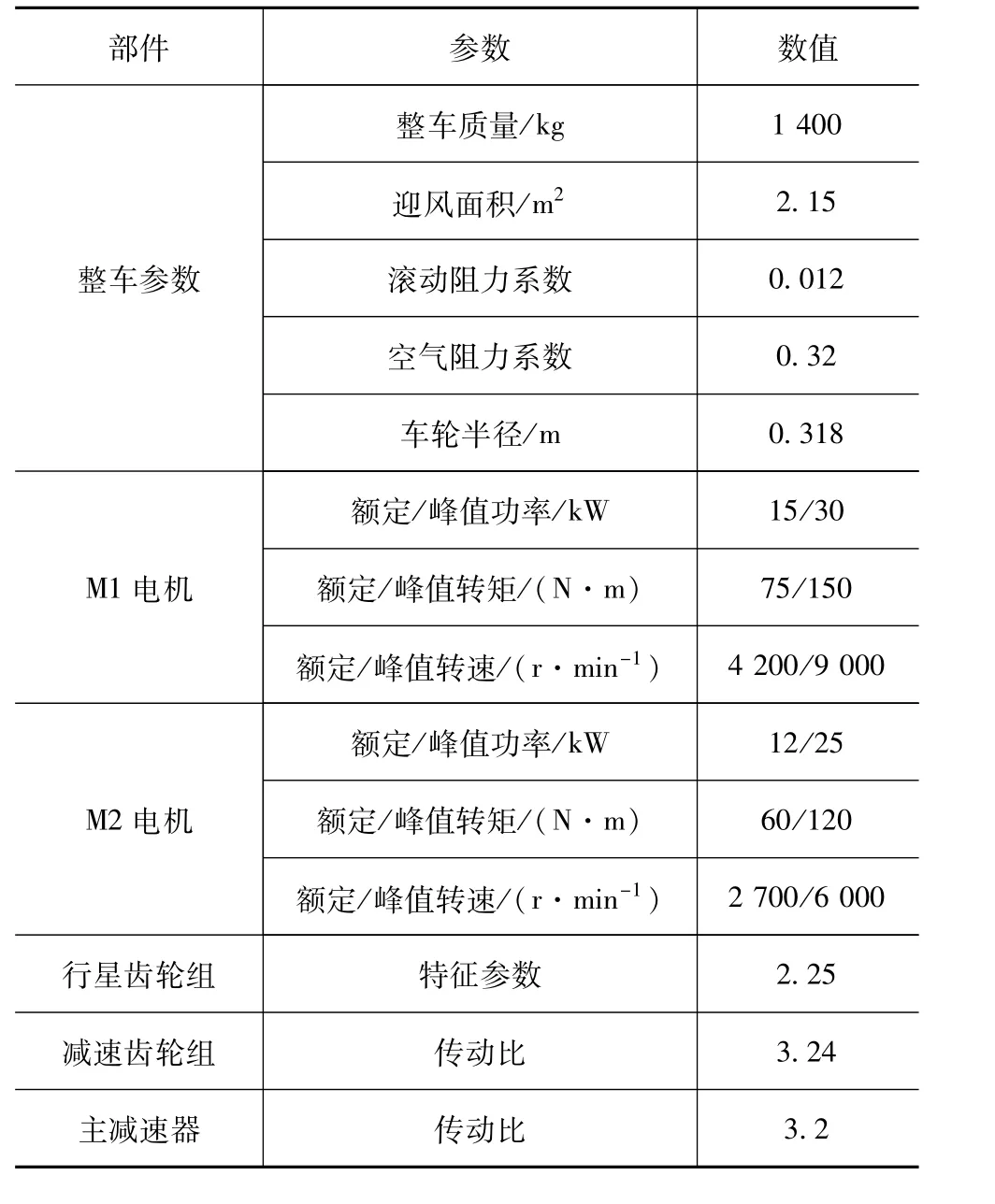
表1 EV动力部件参数
1.2 双电机动力系统建模
1.2.1 工作模式分析
当制动器L1断开,L2闭合,且连接器T位于中间位置时,电机M1工作,M2关闭,系统处于电机M1单独驱动模式,则SM1系统动力学模型为

式中:n1为电机M1的转速;T1为电机M1的转矩;r为车轮半径;k为行星架特征参数;i0为主减速器传动比;Ft为驱动力;v为车速。
当制动器L1闭合,L2松开且连接器T位于右端时,电机M1停止,M2运转,功率经减速齿轮、行星架输出。此时为电机M2单独运行模式,SM2模式系统动力学模型为

式中:ig为减速齿轮组的传动比;n2为电机M2的转速;T2为电机M2的转矩。
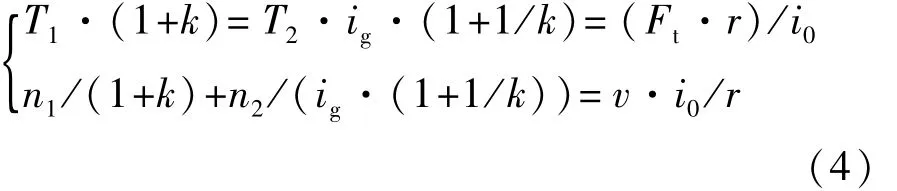
当制动器L1断开,L2闭合,且连接器T位于左端时,两个电机的转矩在太阳轮处耦合,经行星架传递到车轮,驱动汽车行驶。系统处于双电机转矩耦合模式TC,此时的系统动力学模型为

当制动器L1、L2断开,连接器T位于右端时,两电机转速在行星架处耦合,动力经行星架传递到车轮,驱动汽车行驶。系统处于双电机转速耦合模式,此时系统动力学模型可表示为
1.2.2 系统效率建模
不同模式下的系统效率数学模型为
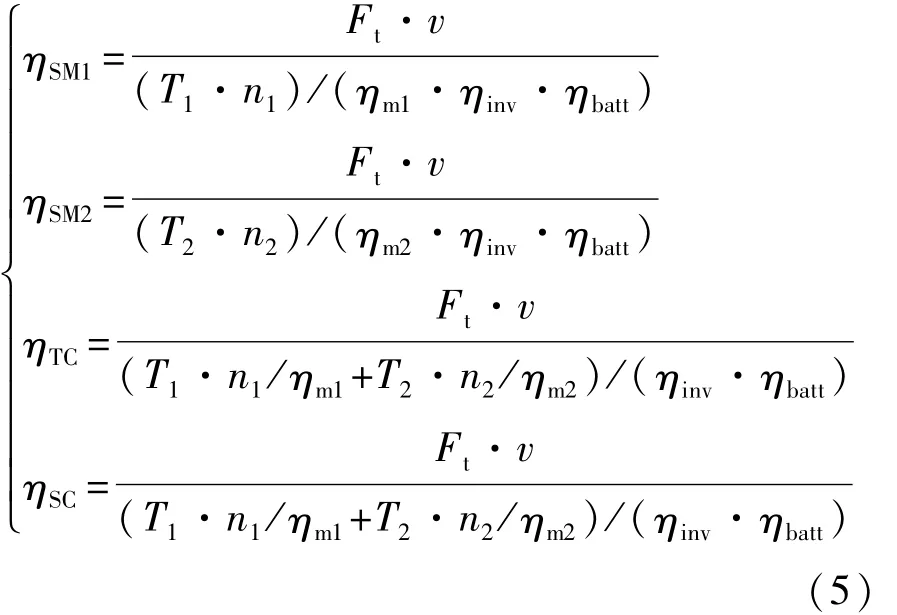
式中:ηSM1、ηSM2、ηTC、ηSC分别为 SM1、SM2、TC、SC模式下的系统效率;ηinv为逆变器效率。
约束条件为
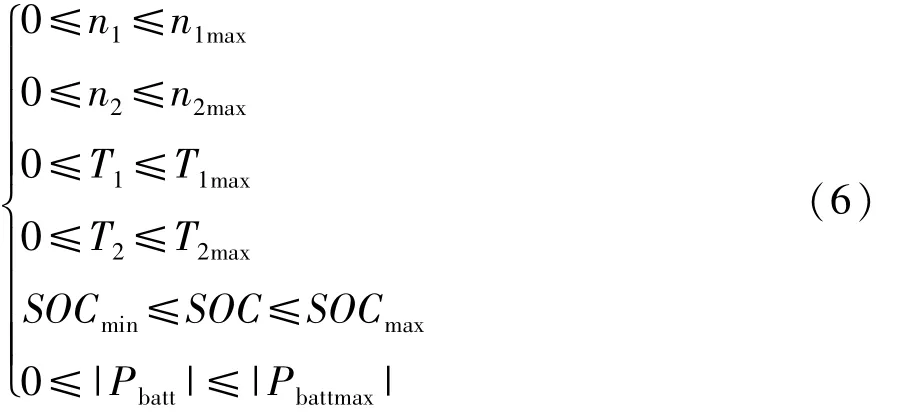
式中:n1max、n2max分别为电机 M1、M2的最大转速;SOCmin为电池组最小荷电状态;SOCmax为电池组最大荷电状态;Pbattmax为当前SOC对应的最大放电功率。
2 驱动系统模式划分与控制策略
2.1 不同模式工作范围的划分
基于上述分析可知,DMCP-EV具有4种驱动模式。在动力需求的约束下,整车控制器根据获得的实时行驶速度、加速度信号、驱动电机的工作特性以及各个模式的工作原理,获得各个模式的工作范围。对各个模式工作范围的划分流程如图2所示,可简述如下,首先由车载传感器采集到速度、加速度信号,然后根据各个模式的动力学模型以及速度等信息,计算各个模式在该工况下所需要的电机转矩、转速,则可以获得各个模式的有效工作范围,如图3所示。
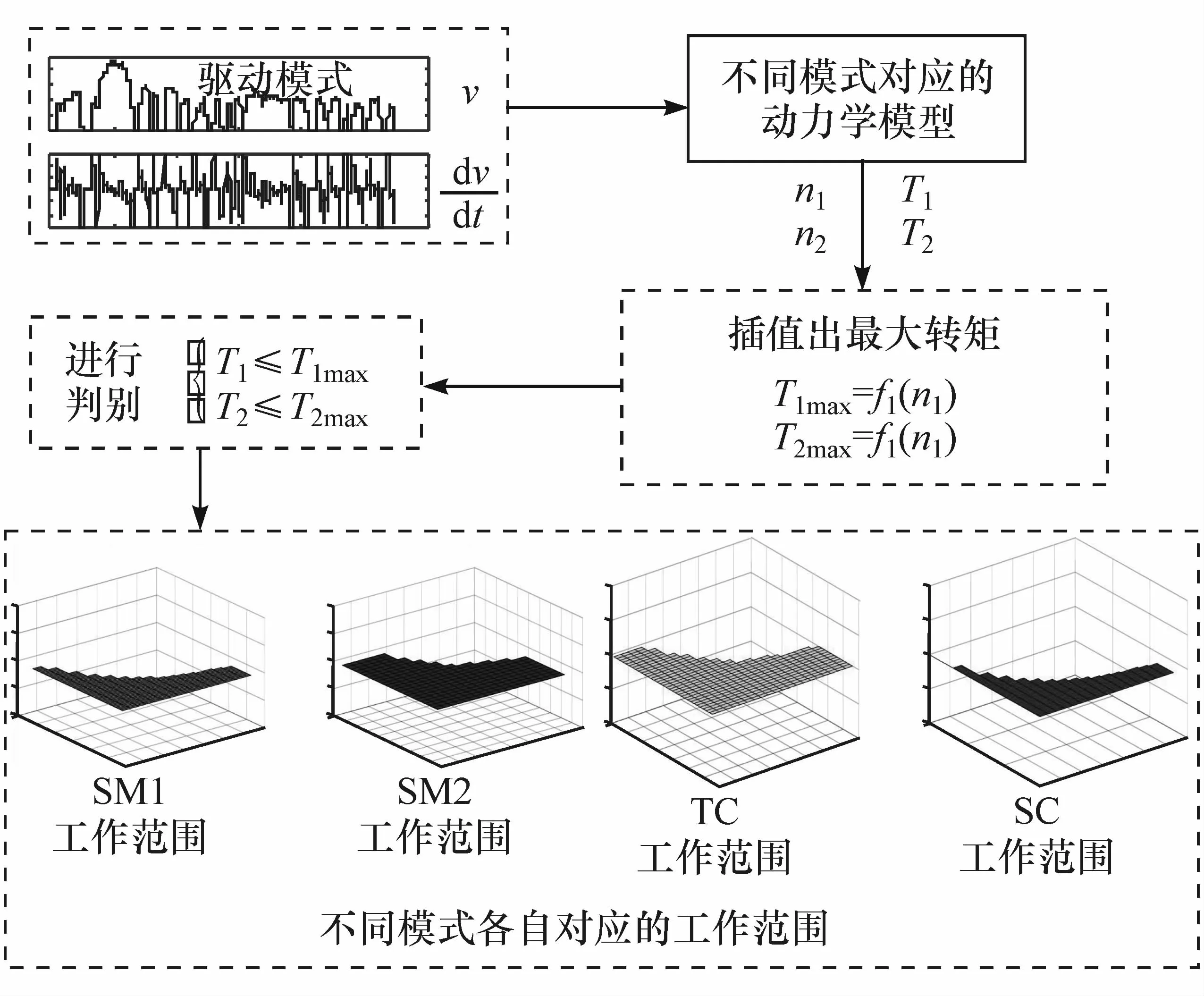
图2 不同模式工作范围划分流程
2.2 基于PSO算法的耦合模式下系统效率优化
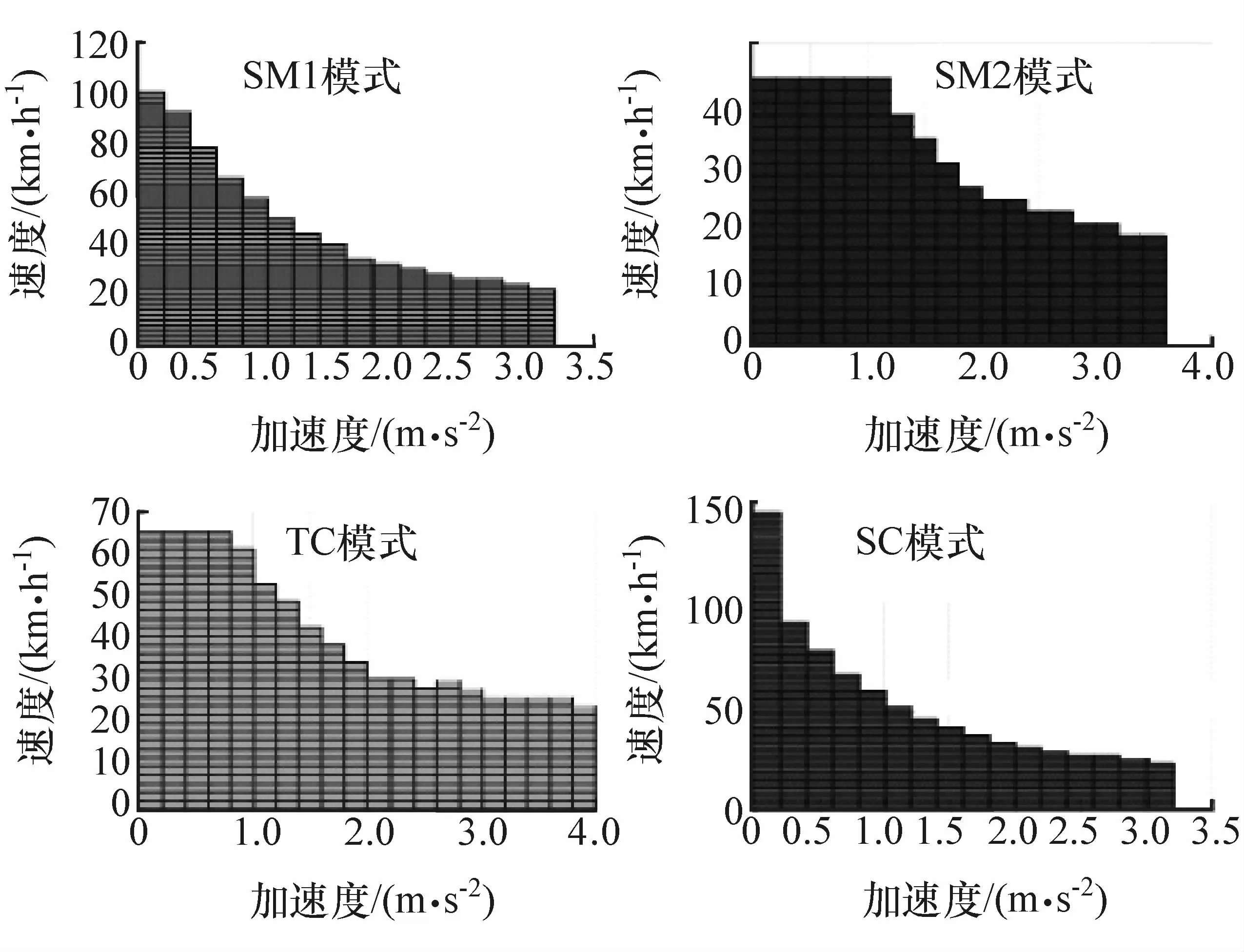
图3 不同模式下的有效工作范围
依据以上各模式工作范围的划分,满足当前速度、加速度以及驾驶员需求的工作模式可能有多种。为提高经济性,采用PSO优化各模式的系统效率,并根据当前行驶工况选择效率最优的工作模式。据此,本文中制定基于PSO系统效率优化的双电机耦合驱动系统控制策略,其框架如图4所示。控制策略是根据当前工况选择效率最优工作模式,具体步骤如下:
(1)判断满足当前工况的工作模式的情况;若仅有一个适合的模式,则选择该模式;若存在多个驱动模式,则进入系统效率优化控制模式;
(2)计算满足当前工况的各个工作模式系统效率,其具体计算过程详见1.2.2节;
(3)选择系统效率最高的工作模式作为当前工作模式以提高整车经济性。
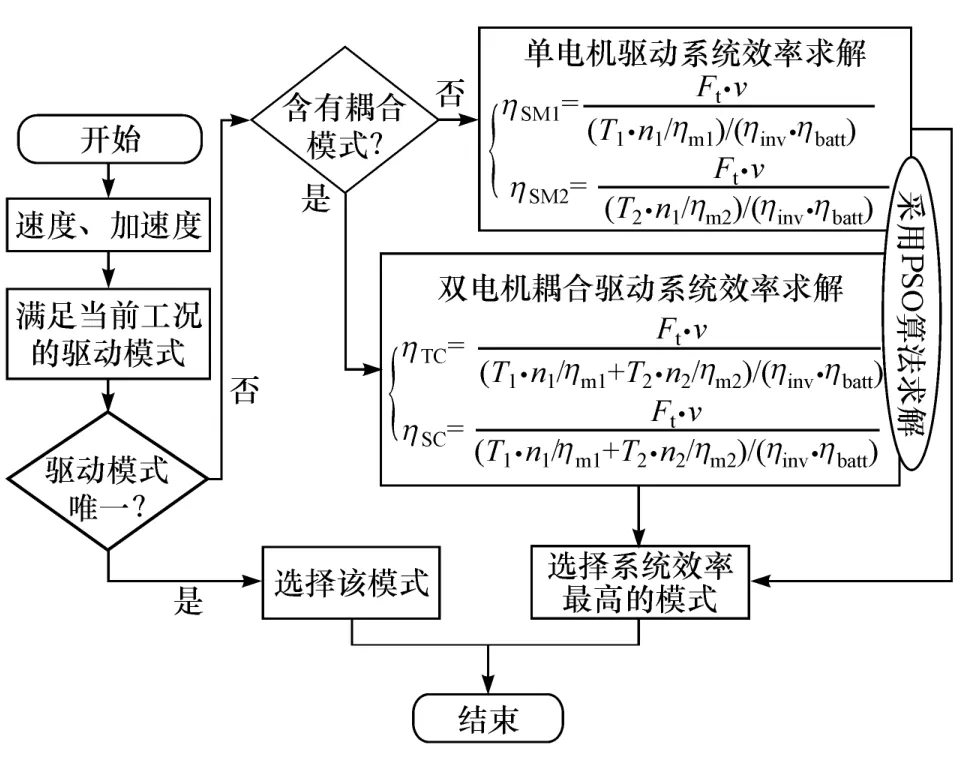
图4 基于粒子群算法的模式划分及控制流程
2.2.1 TC模式下的系统效率优化
TC模式下,两电机的转速与车速成比例,两电机的转矩相耦合,可以在约束范围内进行调节。采用粒子群优化算法优化两电机的转矩分配,以获得系统最优效率。PSO算法初始参数和系统效率流程如图5所示。TC模式系统效率优化过程为:给定速度和加速度,通过粒子群优化算法获得电机M1、M2的目标转矩,使系统效率ηTC达到最优。优化模型如下。
目标函数(适应度函数):

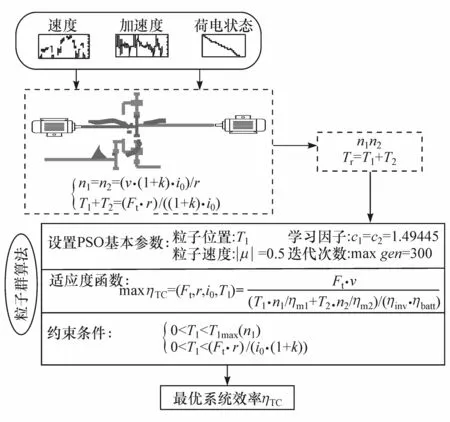
图5 粒子群算法优化系统效率流程图
约束条件:

选取M1电机的转矩T1作为控制变量,则其相应粒子的位置为

式中:i为粒子编号;j为迭代次数。
系统效率寻优结果如图6所示。由图可以看出,系统效率在第40代左右收敛至最优值。TC模式下的最优转矩分配如图7所示。
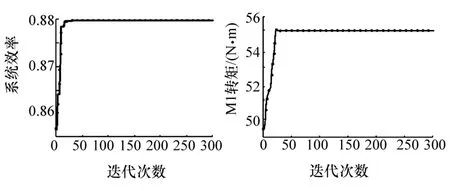
图6 PSO算法寻优迭代图
2.2.2 基于系统效率优化的模式控制
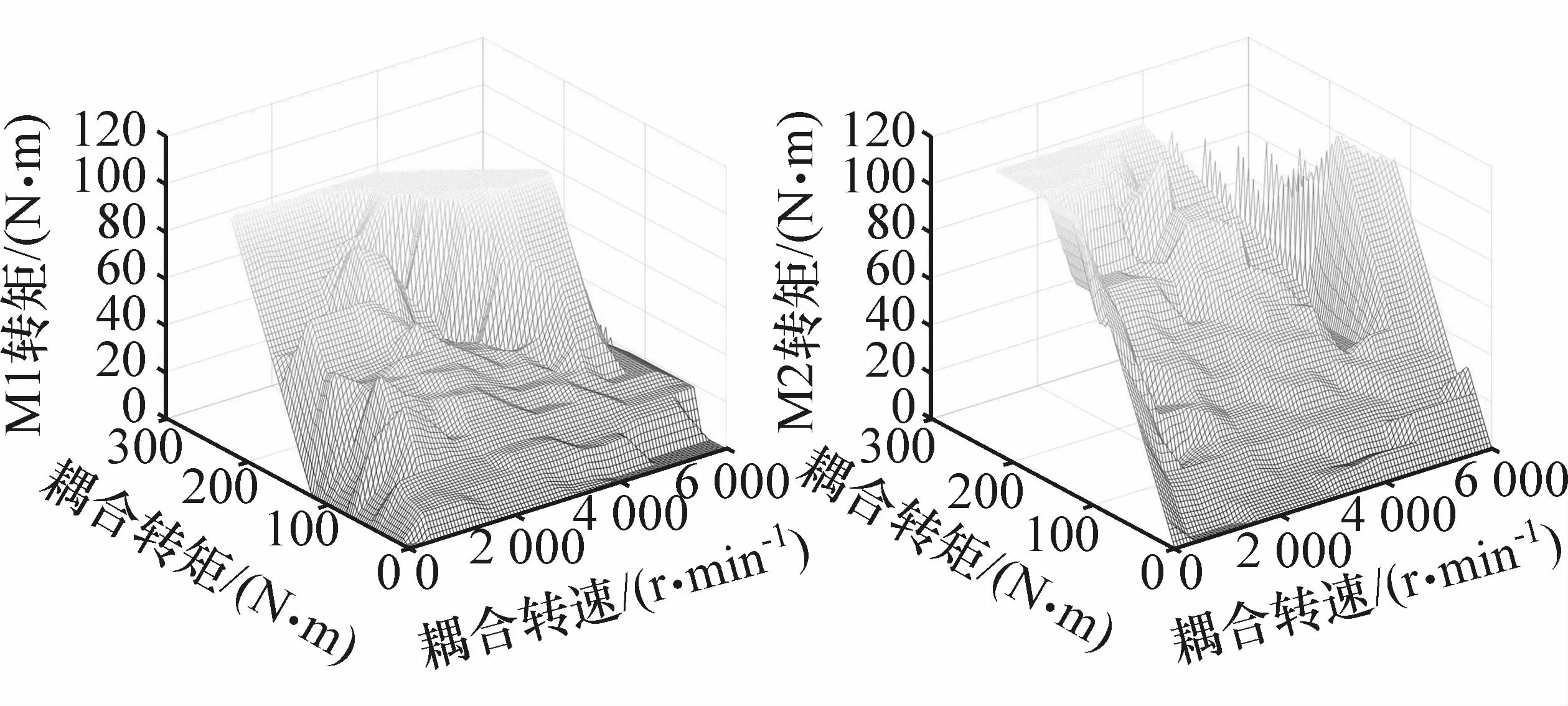
图7 TC模式下的最优转矩分配
在SC模式下,两电机的转矩与驱动力矩成比例,两电机的转速相耦合,可以在约束范围内调节。与TC模式类似,SC模式获取最优系统效率关键是合理分配两电机的转速。同样采用粒子群算法优化,具体求解过程与TC模式类似。图8为SOC=0.9时优化后不同模式下的系统效率。适合当前工况的最佳驱动模式可通过比较该工况下4种驱动模式的系统效率而得出,即可以获得4个工作模式的工作边界,如图9(a)所示。为减少计算量并提高整车控制器工作效率,提前划分了各个工作模式的工作边界,如图9(b)所示。并将结果制成表格存储在控制器中,通过查表获得当前最优工作模式。
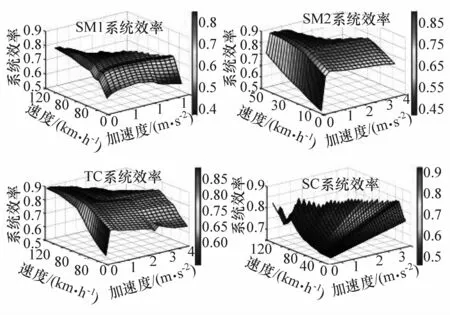
图8 SOC为0.9时不同模式下的系统最优效率
3 仿真与试验验证
3.1 PSO优化前后仿真验证
在Matlab/Simulink环境下实现装备该新型双电机耦合驱动系统的整车模型的搭建,通过优化前后结果对比来验证所提出的基于PSO系统效率优化的模式划分及选择策略的有效性。为体现对比结果的公正性,未经PSO效率优化的系统的模式划分方法与本文相同,模式的选择同样基于瞬时最优的原则,该模式选择策略分别实时计算当前工况下4种工作模式的需求功率,选取需求功率最小的模式作为当前工况下的工作模式。两者在城市道路循环UDDS下进行仿真,结果如图10(a)所示。由图可见,在整个工况过程中,实际车速很好地跟随目标车速。驱动时,该系统基于所提出的控制策略,自动匹配适合当前工况的工作模式,从而在满足车辆动力性能需求的同时,保证了较低的能耗。图10(b)和图10(c)示出该系统优化前后的工作模式随UDDS工况切换的情况,“1~4”分别表示 SM1、SM2、TC、SC工作模式。
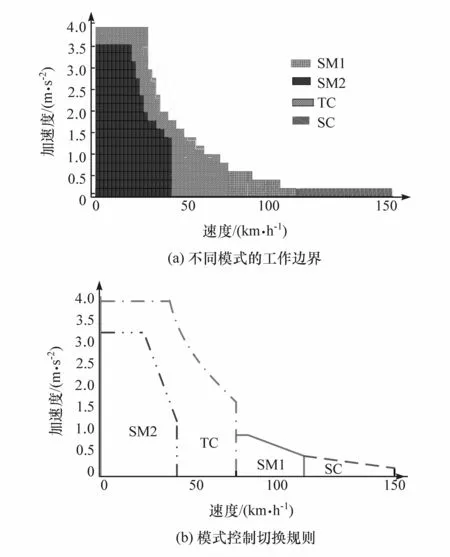
图9 不同模式的工作边界
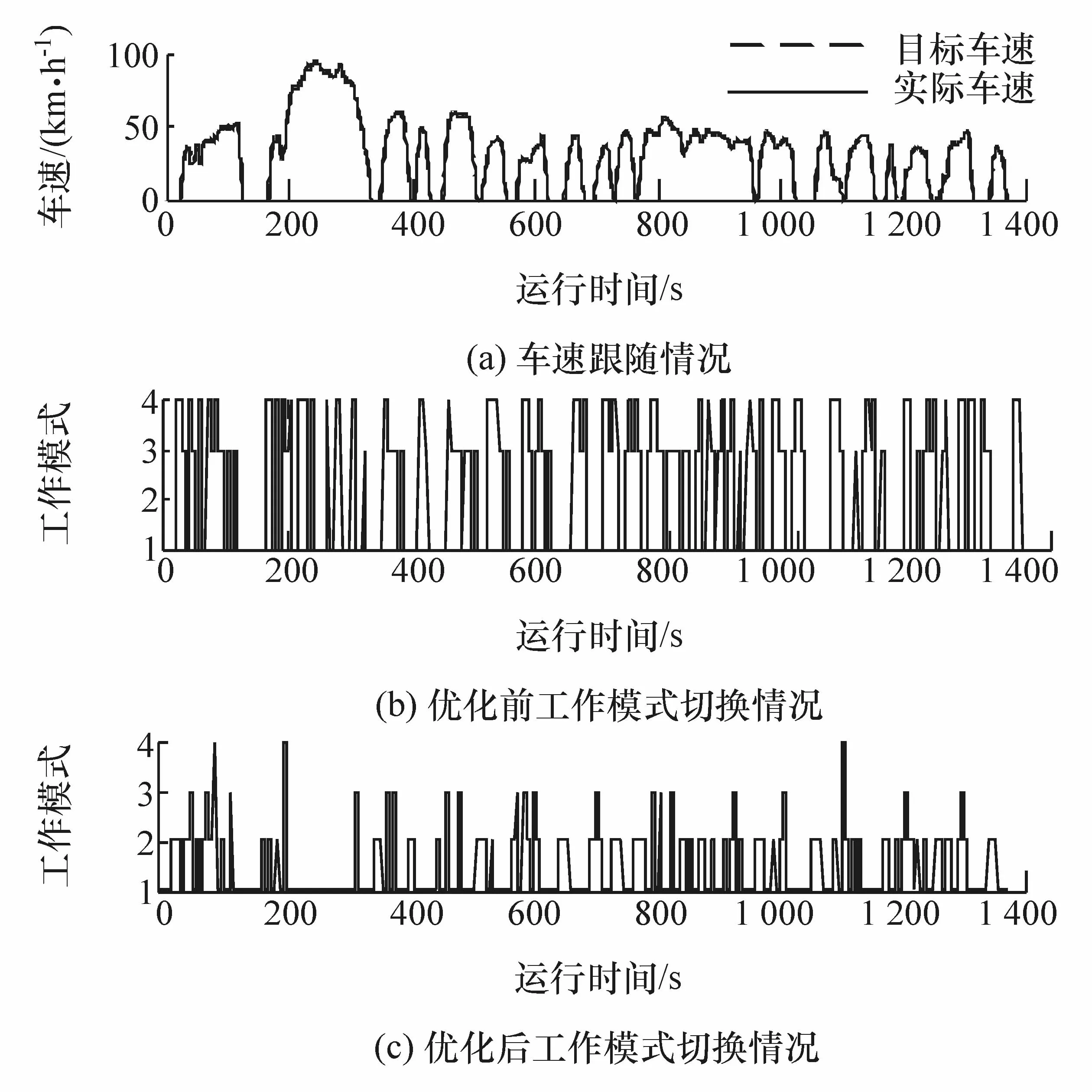
图10 车速跟随情况和优化前后的工作模式切换情况
图11给出了该系统PSO优化前后的两电机的转矩和转速。可以看出,优化前后的M1、M2电机转矩和转速分配变化明显。图12为优化前后的电机转矩以及转速的对比。可以看出,经优化重新分配转矩转速后,该系统的SOC变化范围缩小,能耗从优化前的1.165降低为1.036 kW·h,降低了11%左右,达到了提高整车能量经济性的目的。
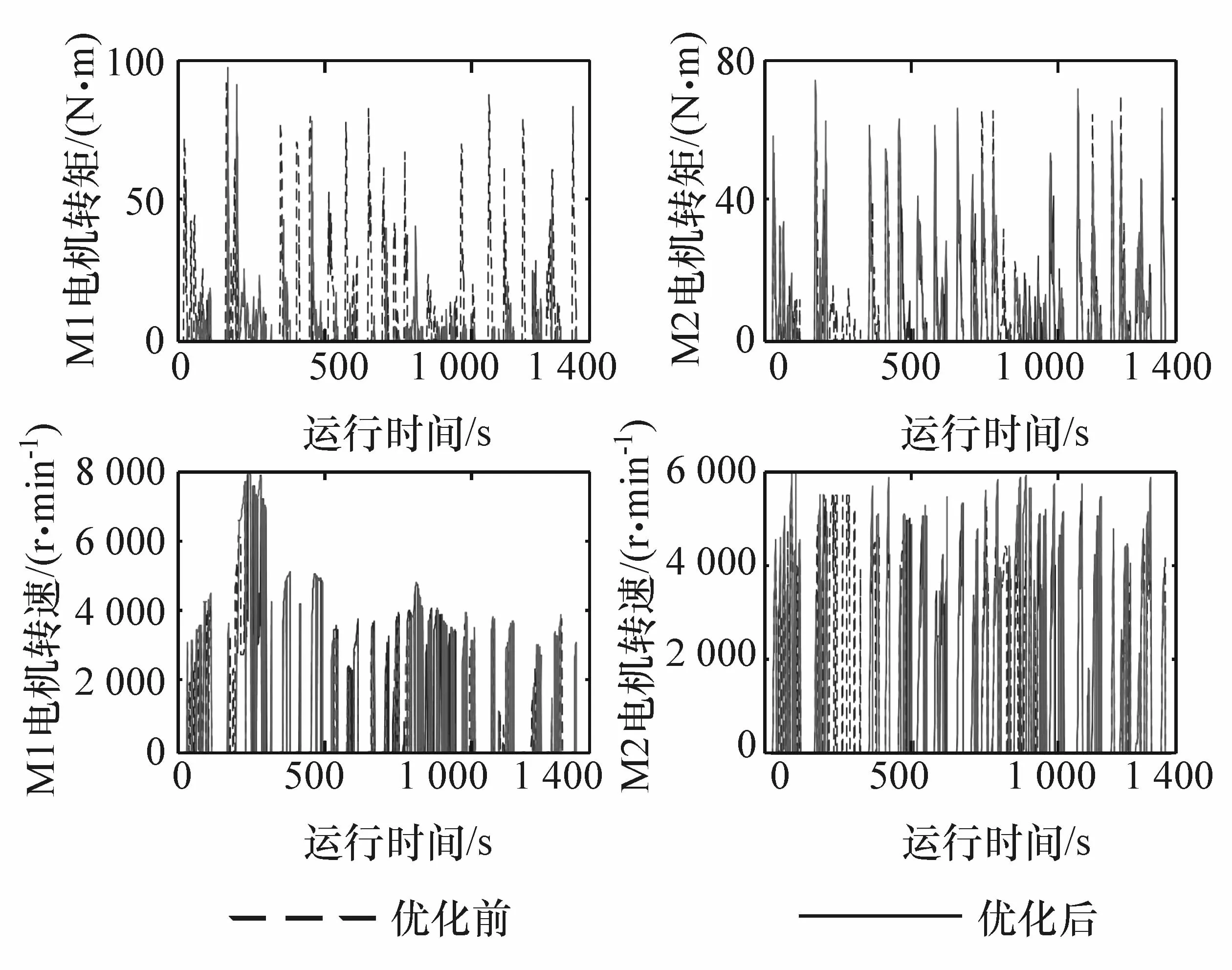
图11 优化前后的M1、M2电机转矩转速对比
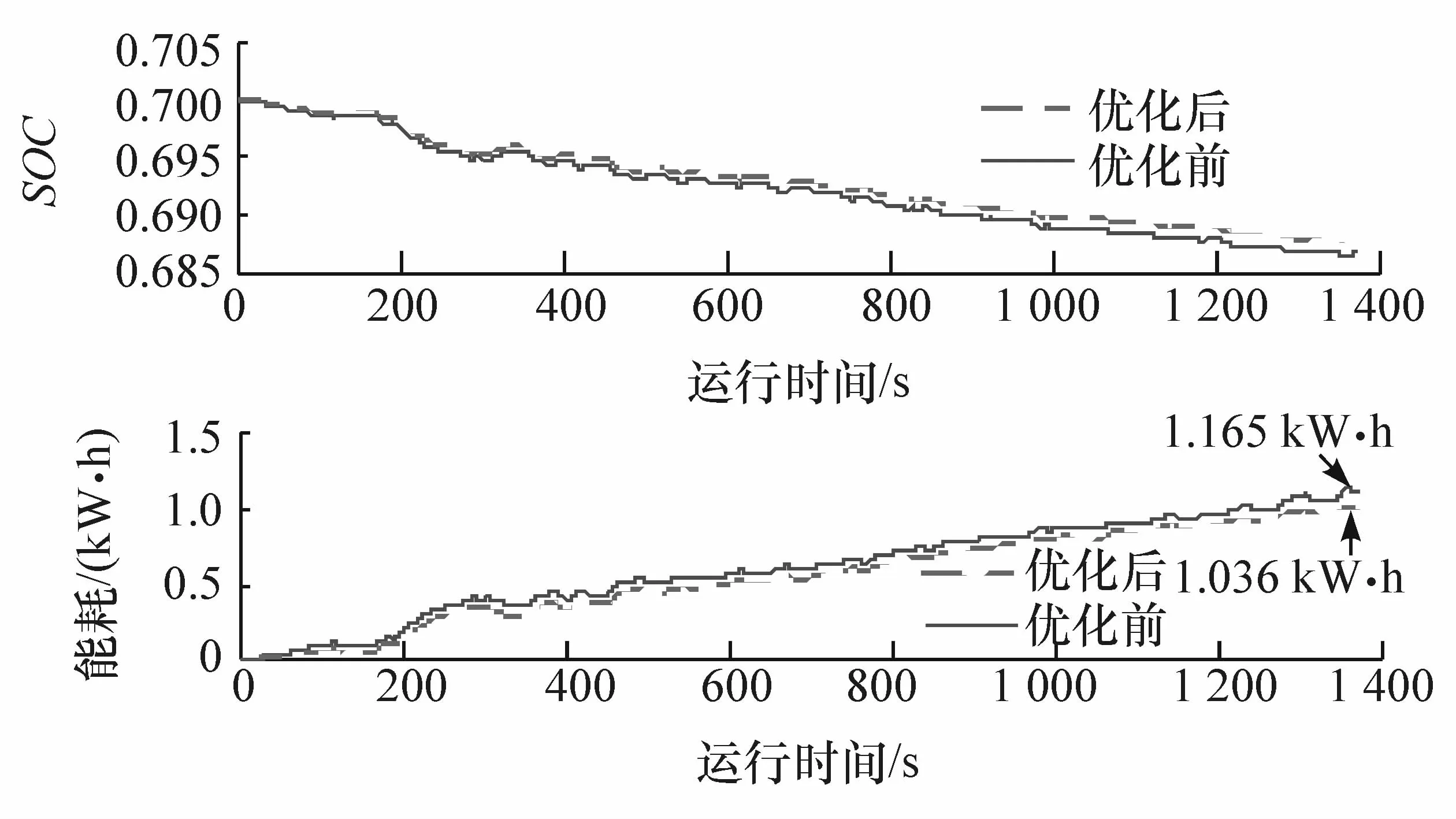
图12 优化前后的SOC和能耗对比
3.2 基于PSO系统优化前后台架试验验证
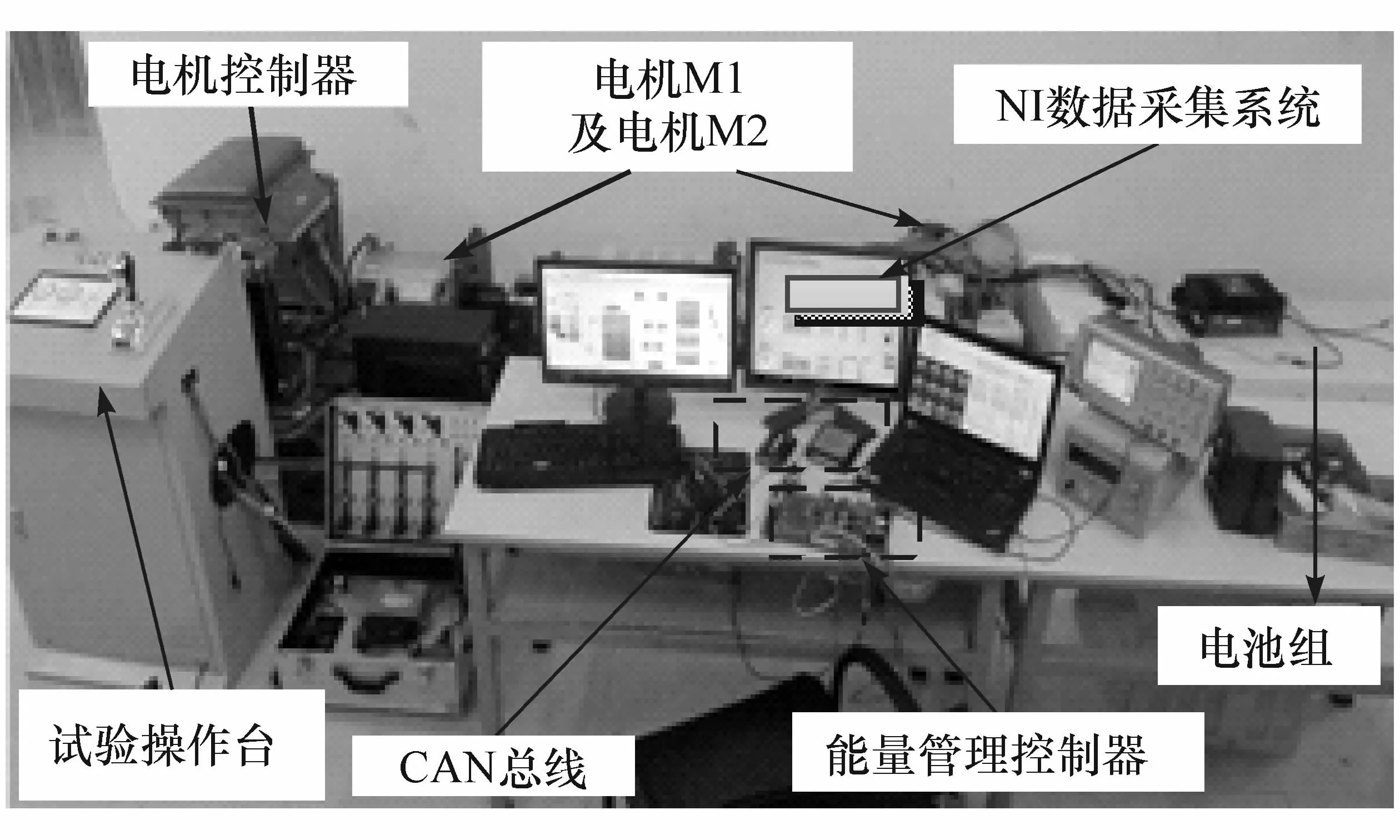
图13 台架试验实物图
为验证PSO系统效率优化的实际效果,基于双电机耦合驱动系统试验平台[15](图13)进行台架试验。选用飞思卡尔MC9S12EQ512汽车级微处理器作为该试验平台的主控制器主芯片。采用CAN总线进行数据通信,波特率设为250 kbps,采用J1939应用协议。使用LabVIEW软件设计上位机数据采集系统的软件部分,硬件部分由PXI数据采集卡、传感器和计算机组成。
试验分别以UDDS和EUDC循环工况进行验证。测得速度、系统效率和电池SOC的曲线图,并与仿真结果进行对比,结果如图14所示。可以看出,台架试验与仿真结果趋势基本一致。
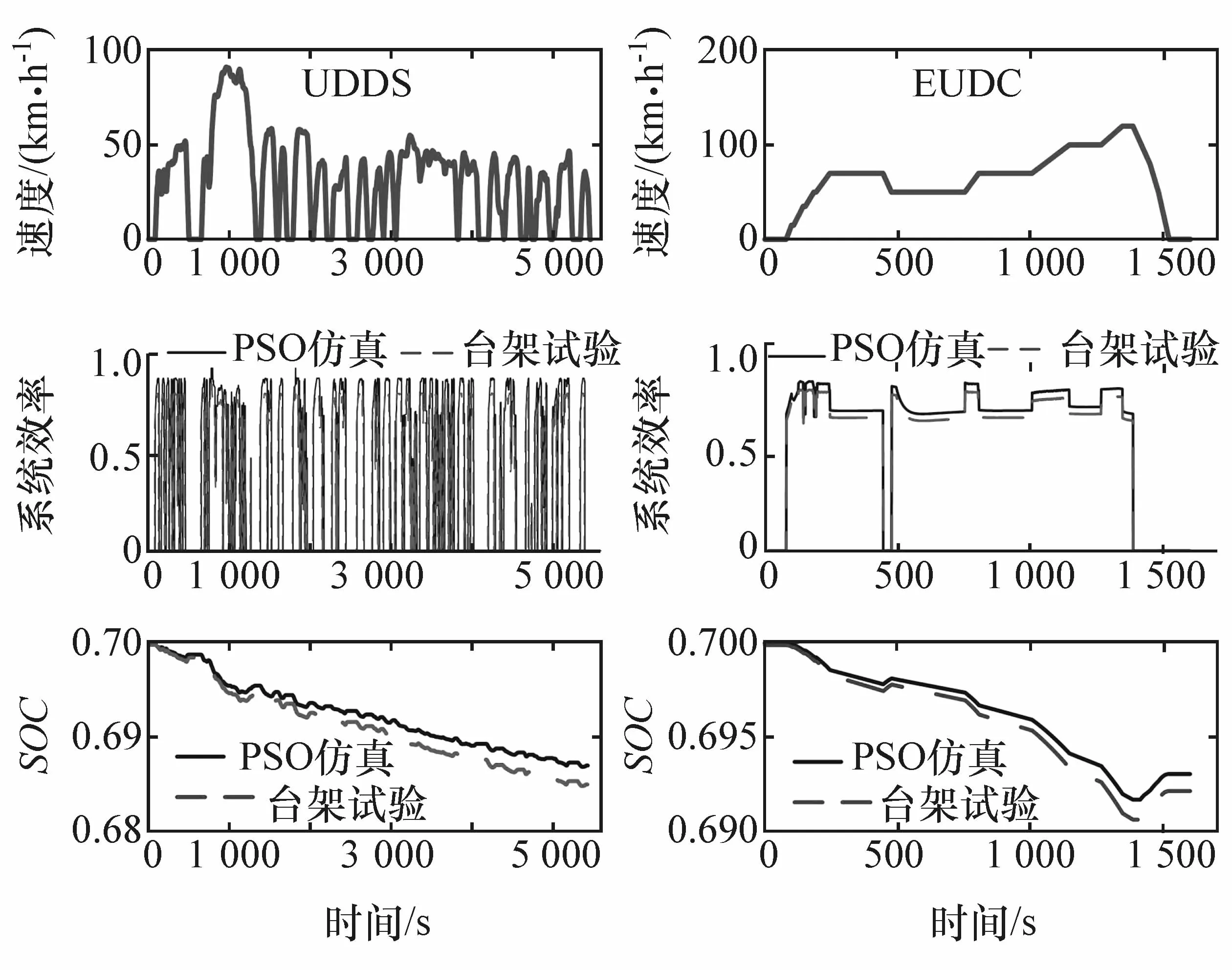
图14 UDDS和EUDC工况下的台架试验与仿真结果对比
综合上述的仿真和台架试验验证的结果,表明所制定的基于PSO系统效率优化后的DMCP-EV驱动模式控制能够有效改善双电机驱动系统的驱动效率,从而降低了能耗,提升了整车经济性。
4 结论
(1)针对一款新型双电机耦合驱动系统及其多模式驱动特性,建立双电机驱动系统动力学和系统效率模型,并制定了经PSO系统效率优化的驱动模式控制策略。
(2)通过仿真和台架试验验证的结果表明,针对DMCP-EV所制定的经PSO系统效率优化的驱动模式控制策略,可获得更合适的驱动模式,提升双电机驱动系统的驱动效率,从而进一步提高DMCP-EV的经济性,优化后能耗降低11%。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
煤气与热力(2022年4期)2022-05-23
防爆电机(2022年2期)2022-04-26
农业工程学报(2022年4期)2022-04-24
汽车工程师(2021年12期)2022-01-17
智能制造(2021年4期)2021-11-04
北京航空航天大学学报(2021年9期)2021-11-02
舰船科学技术(2021年12期)2021-03-29
汽车工程(2021年12期)2021-03-08
