基于虚拟现实的计算机辅助教学系统设计
2020-05-06 04:27王美霞王富荣
江苏科技信息 2020年5期
王美霞,王富荣
(江苏航运职业技术学院,江苏 南通 226010)
0 引言
计算机辅助教学是教师在计算机技术的协助下,完成各类教学活动以及与学生进行教学内容的讨论、课时安排、教学训练等,是通过对话的形式完成互动和交流的一种教学方式。自计算机辅助教学理论被提出后,随着现代化科技的不断进步,计算机辅助教学也借助着各类多媒体计算机得以发展[1]。在教学模式上,计算机辅助教学对传统教育形成了较大的冲击力和挑战,并逐渐成为创新教学模式当中理论与实践的重要来源,形成了一种全新的教学手段和方法[2]。
本文为了让计算机辅助教学系统的内容可以更加生动,提出了将虚拟现实技术与计算机辅助教学相融合的系统,从而通过直观的表现形式提高教学质量。通过虚拟现实技术与计算机辅助教学的结合,进一步发掘出基于虚拟现实的计算机辅助教学系统在教育学领域中的应用作用,打破时间与空间上的限制,为学生的教育提供更加广阔的教学领域,并通过虚物实化与实物虚化的手段,为计算机辅助教学提供全新的教学形式。本文通过对基于虚拟现实的计算机辅助教学系统进行设计,将计算机辅助教学引入更高更远的发展平台。
1 基于虚拟现实的计算机辅助教学系统硬件设计
在计算机辅助教学快速发展的过程中,由于受到了传统计算机辅助教学系统在学习途径及教学资源方面的限制,对于不同学习能力水平的学生而言,无法针对性地起到辅助作用,如何能够通过不同的教学手段及适当的教学模式辅助不同能力水平的学生进行教学,成为计算机辅助教学系统又一更高的要求。计算机辅助教学系统使计算机辅助教学能够更好地呈现,并更加智能化[3]。教育学领域的研究学者提出了更多的教学方法用于提升系统的性能。
本文选用KN-197ubuntu19.21型号的服务器设备为基于虚拟现实的计算机辅助教学系统运行提供硬件环境,KN-197ubuntu19.21型号服务器的配置为双核CPU,外设多个可扩展处理器,内存大小为2 GB,40 GB硬盘。表1为KN-197ubuntu19.21型号服务器的硬件环境配置。
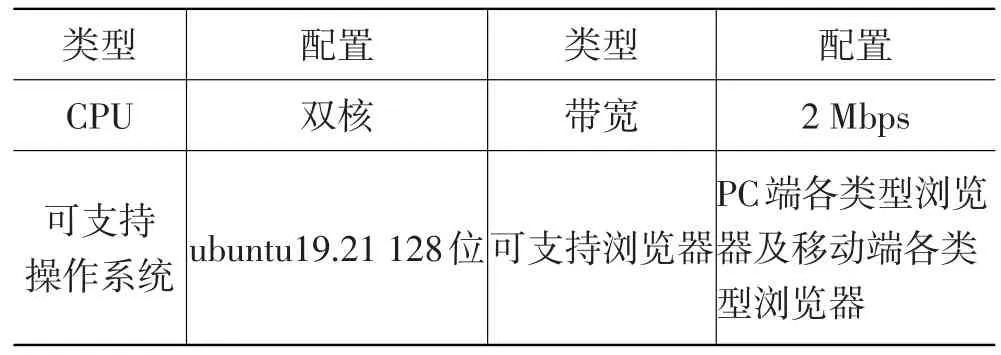
表1 KN-197ubuntu19.21型号服务器的硬件环境配置
KN-197ubuntu19.21型号服务器拥有图形处理及现场可编程逻辑门阵列两个选项,具备适应任何系统应用程序的通用能力,为计算机辅助教学系统运行提供良好平台。利用该硬件设备中的双核多路实现加速器、存储设备及教学资源之间的平衡,在最大程度上提高系统应用程序的性能。
基于虚拟现实技术,选用主流市场中支持计算机辅助教学系统的VR眼镜,包括支持PC端、Htc Vive,3Glasses以及Oculus的VR眼镜,完成相应的外部设备对接后,在计算机辅助教学课件中选择与之相对应的设备之间进行虚拟现实功能连接,实现学生对教学课件的直观感受[4]。此外,增加蓝牙手柄、Touch手柄等其他外设装置的配合使用,方便学生及相关人员通过系统中的交互功能对计算机辅助教学中的资源进行操作和管理。
在虚拟教室中,学生与老师的双向交流是教学系统重点设计的部分,老师图文并茂的讲解可以有针对性地释疑知识点,而更重要的是学生的反馈,包括语音反馈、表情反馈和动作反馈。老师向学生端的信息传递采用VR眼镜的音视频功能,其中声音采用立体声现场还原技术,四路扩音器分置于VR眼镜的两侧,通过共形设计集成在VR眼镜的耳部支架中,考虑到虚拟教室的辅助教育功能,在设计中将扩音器的低音部分做了加强,实现更贴近于真实环境的声音效果;视频展示部分设计了两路“菲斯”棱镜光学折射模块,利用光学材质间不同的折射率实现狭小空间的光路折叠,其优点是可以在近160°的视场内实现特写景物和背景的显示融合,以便为学生带来更接近于真实教室的虚拟体验。学生向教师端的反馈信息通过语音采集、表情采集和动作采集3部分构成。
语音采集较为简单,利用成熟的语音识别模块配以嵌入的语义解析软件完成,语音采集与传输模块同样以共形设计集成于VR眼镜的耳麦中。学生语音的传输与视频数据共用传输通道,分频复用。表情采集与动作采集是系统设计的难点和重点,其目标是实现对学生面部微表情和肢体动作的识别。表情采集以两路微摄像头集成于VR眼镜上,其视轴中心分别对准学生的眼睛,实时采集学生的眉部、眼睑、眼角和颧骨的微表情变化,提取特征值与嵌入到VR眼镜中的情绪处理器对比,判断出高兴、疑惑、思索、茫然等表情,进而判断学生此时对知识的接收是否存在不理解的情况。
基于控制成本考虑,系统设计的微视频传感器采用可见光波段工作,后续升级版本拟采用中波红外波段工作,实现对皮下血液流量、流速的采集,将可以识别和判断更多的情绪,在虚拟显示中实现情绪维度的突破。动作采集设备采用4K高清摄像机索尼FDRAX60,其特点是像素高,3/4视场内畸变失真小,可满足对室内人体部位的有效识别。动作采集设备放置于学生正前方五米偏上位置,以微俯视角度实时监视学生肢体的动作变化,重要节点为头、颈、胸、双手、小臂、上臂、肩、胯、大腿、膝盖、小腿几个部位。在虚拟教室使用前,需调试动作采集设备的摄像头,将视场中心对准学生的人体中心位置,保证学生的身体全部在视场的3/4视场内。为方便虚拟教室的布设,动作采集设备的摄像头放置于可两维运动的转塔上,通过人像识别自动抓捕学生,实现自动化布设,提高使用的便捷性。升级版本系统可采用左右两路动作采集设备,实现对身体侧部动作的拾取,实现立体图像采集。数据传输采用千兆专用网,实现高清视频流和多路语音的双向传输带宽需求。
2 基于虚拟现实的计算机辅助教学系统软件设计
2.1 基于虚拟现实的计算机辅助教学展示
基于虚拟现实的计算机辅助教学展示,分为物件、规则、操控、外设等,物件展示包括对计算机辅助教学物件资源的解析,将各类教学所需的虚拟模型及场景资源解析后,在系统中显示,属于系统中最基础的展示[5]。规则展示是将通信规则与教学资源调试,为计算机辅助教学提供最基础的功能服务[6]。操作展示包括对虚拟物件的摆放以及基础的漫游功能,这一部分内容主要应用于用户体验层。外设展示是整个计算机辅助教学系统中支持虚拟现实与现实交互的重要组成部分,方便交互外设的使用。
增加教学展示大厅为用户提供更加直观的方式,可以选择针对不同学习能力水平学生的课件,同时学生也可以通过系统教学展示大厅自主管理课件。图1为教学展示大厅的主要功能层次。

图1 教学展示大厅主要功能层次
可以看出,教学展示大厅主要是由教学课件、用户信息、学习成果以及公告栏4个模块组成。教学课件模块用于展示部分优秀教学课件资源,方便用户直接进行观看或将资源下载并编辑[7]。用户还可通过分类查找教学课件的形式在海量资源中搜寻优质教学资源直接完成教学。在用户信息模块中可以使用本系统的用户基本信息,例如用户名称、用户头像等,用户拥有对个人用户信息进行修改的权限,同时,该模块方便后期管理人员对用户权限的管理。学习成果展示模块主要用于展示用户自行下载或编辑的教学课件的学习成果,可以通过不同的方法展示,例如沙盘模式、普通编辑模式等,用户可以在系统中通过列表查询不同学生的学习成果,找到自己的学习成果或对学习成果进行分类[8]。公告栏模块用于为用户推荐优质的学习成果展示或教学资源分享,公告栏中的具体内容应根据不同运营商定制化展示。
2.2 学生学习行为评价
利用BP(Back Propagation)神经网络算法,对计算机辅助教学系统中选择输出数据信息的误差、输出前各个模块中导致其产生误差的因素进行评估,再计算该误差对前一误差的影响进行评估,通过不断反复,完成对计算机辅助教学中各个阶段的教学资源划分精准程度计算。在BP神经网络中对计算机辅助教学资源的交互渠道进行创建,主要输入包括影响划分精准程度的因素,再将影响因素通过相应手段过渡到中间层当中[9]。通过数字资源信息处理核心对传递过程中的相关信息进行处理,并将结果传输到输出层当中。图2为学生学习行为评价流程。

图2 学生学习行为评价流程
根据计算机辅助教学资源划分精准程度提升影响因素,提出3种不同类型教学,不同学习能力水平的学生对相同类型题目的正确率计算公式为:

公式(1)中,P1表示视觉型中不同学习能力水平学生对相同类型题目的正确率;k1表示视觉型类型中学生个数;k2表示视觉型学生中答对题目的人数总和。

公式(2)中,P2表示听觉型中不同学习能力水平学生对相同类型题目的正确率;k3表示听觉型中学生个数;k4表示听觉型学生中答对题目的人数总和。
公式(3)中,P3表示读写型中不同学习能力水平学生对相同类型题目的正确率;k5表示读写型中学生个数;k6表示读写型学生中答对题目的人数总和。
划分视觉型、听觉型和读写型的学生,与之相对应的为视觉型、听觉型和读写型的计算机辅助教学资源,因此输出层BP神经网络中神经元的数量为3个,用Q={q1,q2,q3}表示,其中q1表示视觉型准确率;q2表示听觉型准确率;q3表示读写型准确率。在BP神经网络中,隐含层中的神经元数量对计算机辅助教学系统本身的性能有着直接的影响,因此还需明确对隐含层中的数目信息计算公式:

公式(4)中,Xa表示BP神经网络隐含层中数量;a表示输入层中单元数量;b表示输出层中单元数量。根据上述公式计算出相应的计算机辅助教学系统中各项教学资源的划分精准度,从而通过结果输出的模式转换形式,得出评价结果[10]。同时,教师也可通过结果对不同类型、不同学习能力水平的学生提供合理的学习建议,形成良好的教学回路。
3 实验
基于虚拟现实的计算机辅助教学系统的实验,主要是仿照系统在用户使用过程中,通过相应实验结果数据对该系统性能进行分析。
3.1 实验准备
首先,利用仿真实验软件创建本文计算机辅助教学系统与传统系统的仿真运行环境,根据计算机辅助教学系统的功能创建测试仿真用例,逐渐检查系统与用户功能要求是否符合实现假设。为保证仿真实验结果的可靠性,创建系统错误数据及有效数据共600例,其中错误数据300例,有效数据300例。通过实验判断系统是否可以正确执行。其次,在实验过程中对不同学习风格、学生能力水平等影响实验结果的因素进行统一设定。将上述实验数据分别引入本文计算机辅助教学系统和传统计算机辅助教学系统当中,设置本文系统为实验组,传统系统为对照组。
3.2 实验结果及分析
根据上述实验准备完成仿真实验,并将实验结果中的数据信息进行记录,绘制成如表2所示的实验组与对照组实验结果对比。
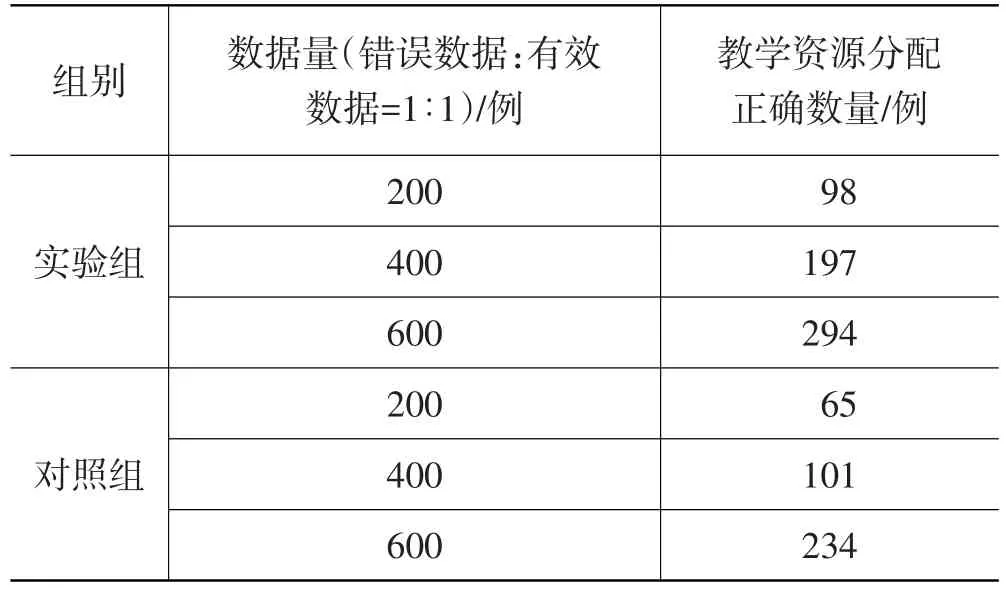
表2 实验组与对照组实验结果对比
根据表2中的实验结果数据可以看出,实验组的教学资源分配正确数量明显高于对照组的教学资源分配正确数量。因此通过仿真实验进一步证明本文提出的基于虚拟现实的计算机辅助教学系统与传统系统相比,有效提高了对不同学习能力水平的学生教学资源分配的正确率,针对性更强,因此本文系统更适用于实际计算机辅助教学。
4 结语
本文通过对基于虚拟现实的计算机辅助教学系统的设计,有效改善了传统系统中的师生交流平台及学生学习平台,并将相关移动设施、虚拟现实技术引入到该系统当中,实现了对计算机辅助教学的交流立体化和学习智能化,有针对性地对不同学习能力的学生提供符合其自身需要的教学资源,增加教学资源的利用率,并更好地为师生提供服务。
猜你喜欢
江苏科技报·E教中国(2022年5期)2022-05-11
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
甘肃教育(2020年14期)2020-09-11
甘肃教育(2020年4期)2020-09-11
计算机教育(2020年5期)2020-07-24
冰雪运动(2018年6期)2018-05-23
商周刊(2017年24期)2017-02-02
中国教育技术装备(2016年11期)2016-12-01
海外星云(2016年7期)2016-12-01
中国教育技术装备(2016年15期)2016-03-01