
无人驾驶公交专用道系统
2020-04-24 08:24
交通与港航 2020年2期
上海同济城市规划设计研究院有限公司
0 引 言
随着人工智能和传感器技术的发展,无人驾驶技术得到了越来越多的关注,各类科技公司以及车企纷纷发力,能应对大部分行驶环境的L4级无人驾驶车辆已在实验场地甚至实际道路上测试行驶。在实际的城市道路行驶环境中,不仅有超车、转向、变道等行驶现象,更会出现非机动车和行人的干扰等情况,因此实际的城市道路对无人驾驶技术要求较高。虽然目前无人驾驶汽车在技术上已经可以在绝大多数情况下无需人工干预行驶,但其在复杂情况的处理能力依然被质疑,因而根据目前无人驾驶技术发展现状,无人驾驶车辆尚不具备大规模直接在城市道路复杂环境行驶的能力。
目前很多城市公交服务水平不能满足居民出行需求,乘客抱怨最多的问题是等候时间长和不准时。重要原因是公交运营的司机成本高,约占总成本的40%,在资金投入不足的情况下,会造成运营车辆增加困难;经济条件一旦允许,乘客就转向使用小汽车出行,因而又造成道路拥挤,加剧公交的不准时和等候时间长,最终使公交车运营面临更加困难的局面。
综上,鉴于公交车辆的行驶相对于普通的车辆诸如私家车而言更为可控,因此如果能够将已有的无人驾驶技术应用于公交系统,无疑是公交走出困境的重要途径。然而,鉴于无人驾驶技术尚有不成熟之处以及缺乏大范围实际应用检验的情况,亟需提供一种适于无人驾驶公交车辆的专用道系统,从而为诸如L4级无人驾驶公交车辆提供场景简单、监控全面、能充分发挥协同驾驶作用的运行环境,帮助无人驾驶公交车辆的实际运行得以适应并融入复杂的城市道路环境,并确保其安全行驶,尤其是安全穿越道路交叉口并避免造成与其它车辆或行人的相互冲突和干扰。这也是无人驾驶技术在短期内最为可行的可较大规模实施的实际应用场景。
1 系统规划思路
为克服现有的城市道路交通条件或环境不适于投入无人驾驶公交车辆应用的缺陷,综合应用无人驾驶、智能交通、先进通讯等技术,本文提出一种新的在新建或既有城市道路中适于不低于L4级无人驾驶公交车运行的专用道系统。
无人驾驶公交专用道系统是智能车路协同的一种方式。智能车路协同系统是采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成安全、高效和环保的道路交通系统[1]。
无人驾驶公交专用道系统由公交专用道网络和无人驾驶公交协同控制系统组成。
(1)公交专用道网络
公交专用道网络是指多个交叉口和连接至各交叉口通行区的沿多个方向的多条道路构成的适于无人驾驶公交车通行的道路网。公交专用道网络主要由五部分构成:路中专用道、专用道交叉口、专用道站点、人行过街横道线和公交车场。
无人驾驶公交专用道是指在道路中央设置至少双向2车道、外侧有物理分隔的专用通道,除人行过街横道线处,禁止其它车辆及行人进入。专用道交叉口设置公交专用信号相位,该时段内任何其它车辆和行人严禁进入交叉口控制区域。交叉口控制区域由专用道交叉口通行区和相邻的部分专用道区域组成。通过物理隔离的专用道和交叉口专用信号相位,为无人驾驶公交车行驶创造与行人和其它车辆完全分隔的行驶环境,使其能在复杂的城市道路环境下安全高效地通行。
专用道站点包括公交站点和备用车停靠站。路段人行过街必须由信号灯控制,红灯期间严禁行人和车辆横穿专用道。公交车场供无人驾驶公交车能源补给、维护保养和夜间停车,与专用道直接相连,规模和数量根据实际需要而定。
(2)无人驾驶公交协同控制系统
无人驾驶公交协同控制系统是根据全面的道路交通信息智能控制信号灯、协同引导无人驾驶公交车辆在交叉口和专用道上高效通过冲突点、并保障行驶安全的控制系统。无人驾驶公交协同控制系统包括道路感知装置、控制信号传输装置、协同控制装置等。公交专用道网络各组成部分均可布设相应设备,实时采集并传输道路交通各类信息,实现与无人驾驶公交协同控制系统及无人驾驶公交车辆的信息实时传输。无人驾驶公交协同控制系统可根据需要协同控制无人驾驶公交车辆。
2 系统构建方法
2.1 专用道网络规划设计原则
通过对公交专用道网络进行特殊的规划设计,使其满足诸如L4级无人驾驶车辆的行驶条件。规划设计主要遵循以下原则:
(1)时空封闭原则——专用道路段仅供无人驾驶公交车辆使用,避免其它车辆、行人等随意进入;交叉口公交专用信号相位时段严禁其他车辆、行人占用或进入交叉口控制区域。
(2)全系统智能化原则——专用道网络各组成部分均可根据其功能按需布设相应设备。
(3)多模式适应原则——系统构建方法充分考虑适应多种公交运行模式。
2.2 专用道智能控制模式
无人驾驶公交车辆采用协同控制和单车主动控制相结合的模式。协同控制即道路协同管理,在全时空动态车、路信息采集和融合的基础上,管理在专用道网络上行驶的无人驾驶公交车辆的运行,实现系统运行最优化。单车主动控制即车辆根据实时采集的道路交通信息,进行主动的安全控制行驶,实现单车运行最优化。

图1 无人驾驶公交专用道横断面一般形式

图2 借道超车示例
无人驾驶公交车辆在专用道网络上行驶时,根据行驶区域和路况,可自动切换协同控制和单车主动控制模式,实现行驶全过程的安全高效。无人驾驶公交车辆初始启动时可进入协同控制模式,当某区域车辆发生突发情况时,可自动切换成单车主动控制模式,并将信息实时反馈至无人驾驶公交协同控制系统,协同控制系统再根据各车辆情况调整控制方法。
2.3 专用道一般路段
2.3.1 路段横断面规划
一般情况,无人驾驶公交专用道适于布置在两侧带非机动车道的双向4车道或6车道以上的主、次干路上,道路中间布置双向或单向无人驾驶公交专用道且专用道之外仍可为其它车辆和行人留有通行空间(见图1)。特殊情况,可考虑设置公交专用路,仅供公交车辆和慢行交通通行。
无人驾驶公交专用道设置于道路中央,避免设于路侧受地块出入口影响。专用道设置至少2车道,与其它车道一般由物理隔离带相互分隔,从而提供更易于现有无人驾驶公交车辆安全运行的道路环境。
2.3.2 一般路段无人驾驶公交协同控制
无人驾驶公交车辆行驶于一般路段时,可处于协同控制状态,智能控制系统可控制车辆直行、加减速、借道超车等,实时调整车辆运行排列情况。考虑乘客对公交车辆准点率的要求,控制系统综合各车辆的到站时间要求协调控制,可提升公交车辆的整体准点率。
例如,1号车到站时间要求为09:31分,2号车到站时间要求为09:30分,则协同控制系统可命令2号车加速,借道超车,在1号车前到达公交站点(见图2)。
2.4 专用道交叉口
2.4.1 交叉口控制区域设定
为确保专用道的行驶封闭性,专用道交叉口必须设置无人驾驶公交专用信号相位,在该相位期间,任何其它车辆和行人严禁占据和进入交叉口控制区域。交叉口控制区域的设定可保证交叉口无人驾驶公交专用信号相位期间,无人驾驶公交车辆能够协同调整车速和路径等,高效通过交叉口。交叉口控制区域由交叉口通行区和自交叉口通行区的边缘向外沿多个方向延伸的无人驾驶公交专用道部分区域构成(见图3)。交叉口通行区指无人驾驶公交车辆通过交叉口需要占用的交叉口行驶区域。无人驾驶公交专用道部分区域是指由交叉口的部分进口专用道和部分出口专用道组成的控制区域,简称为专用道控制区。交叉口无人驾驶公交车辆进交叉口排队以及出交叉口通过协同控制同步利用进、出口道,可提升交叉口整体通行效率。
有了交叉口控制区域的设置,无人驾驶公交可以不受任何其它车辆和行人的干扰,完全按照协同控制系统制定的路径和速度行驶。在交叉口控制区域设定中可依据如下原则:交叉口内,基于最优行驶轨迹+安全距离形成交叉口通行区;专用道上,基于交叉口专用道停止线向后延伸至合理距离形成专用道控制区。交叉口控制区域包括交叉口通行区和专用道控制区,相邻交叉口的交叉口控制区域彼此不重叠。交叉口控制区域进口道上不得有人行过街横道线、公交站点和备用车停靠站等有可能影响车辆行驶速度的设施。
无人驾驶公交专用道为交叉口与相邻交叉口之间的仅供无人驾驶公交车辆行驶的专用车道,无人驾驶公交专用道控制区仅为其中一部分,该部分长度设置考虑多方面因素,可基于如下步骤进行设置,结合图3具体说明:
(1)根据冲突区域的分布,各车流方向遇到的第一个冲突区域距离停止线的距离为L,其中最近的距离为Lmin,其中,冲突区域为车辆在交叉口控制区域内自各个进口道沿各个方向行驶会产生彼此冲突的区域,图中示意性地表达了诸多沿车辆直线行驶线路或沿车辆转弯的弧线行驶线路的块状区域作为冲突区域。
(2)根据无人驾驶公交加速度(乘客舒适的加速度)及直行方向的最大车速等条件,计算各方向车辆从停止状态加速至最大允许车速通过的距离为S。
(3)交叉口控制区域专用道控制区进口道部分:停止线向进口道路段延伸至少S-Lmin的距离长度,同时,根据具体情况,依据专用相位的最大允许时长,利用可通过的车辆数反推所需要的延伸距离长度,再综合各种因素包括至停止线减速停车距离,给出进口道路段延伸的范围。
(4)在不影响出口道车辆运行的情况下,交叉口出口道处最大允许排队长度为S1,车辆按照最大允许车速由进口道变道至出口道所经过的距离长度为S2,S1、S2和S-Lmin中不长于进口道延伸长度的最大值为Smax,交叉口控制区域专用道控制区出口道部分即停止线向出口道路段延伸Smax的距离长度的范围。

图3 交叉口控制区域示意图
2.4.2 交叉口无人驾驶公交协同控制
交叉口无人驾驶公交协同控制系统包括道路感知装置、控制信号传输装置、协同控制装置等。道路感知装置能够实时监测进入或离开或行驶于所述交叉口控制区域的无人驾驶公交车辆,并将监测结果发送给控制信号传输装置及交叉口协同控制装置。交叉口协同控制装置能够根据所述监测结果形成专用于指挥所述交叉口控制区域内的无人驾驶公交车辆互不冲突地按各自的预定路线通过所述交叉口的交叉口控制逻辑,并依据所述交叉口控制逻辑生成对所述交叉口控制区域的各个无人驾驶公交车辆的控制指令,并将控制指令发送至控制信号传输装置。控制信号传输装置能够将控制指令及监测结果发送至交叉口控制区域的各个无人驾驶公交车辆。
交叉口无人驾驶公交协同控制系统是无人驾驶公交协同控制系统的重要组成部分,智能控制交叉口信号灯和交叉口车辆通行。
(1)交叉口信号智能控制
设置无人驾驶公交专用道的道路中所有需要平面穿越该道路的交叉口均须设置信号灯控制。在该交叉口中,无人驾驶公交专用道享有信号灯专用相位。专用相位是指信号灯专门分配给无人驾驶公交通行的相位。在专用相位期间,任何其它车辆和行人不得占据和进入交叉口通行区,其它车辆指非无人驾驶公交车辆。
交叉口协同控制装置包括信号灯装置,信号灯装置能够提供专用于无人驾驶公交车辆通过交叉口的专用相位,专用相位时长根据所述监测结果和所述交叉口控制逻辑形成。信号灯装置还能够提供专用于指挥其它车辆或行人通过交叉口的普通相位。
无人驾驶公交拥有专用相位。信号灯周期和专用相位时长是根据其它机动车和无人驾驶公交车的运行状况,在合理的范围内进行智能化的动态调整。专用相位在开启时,交叉口通行区内必须没有任何行人和其它车辆;专用相位结束后普通相位开启时,交叉口通行区内必须没有任何无人驾驶公交车辆。由此,兼顾道路的通行效率和安全性。
(2)交叉口通行控制模式
专用相位期间可基于交叉口通行控制模式对交叉口的车辆通行进行控制,控制模式根据交叉口控制逻辑形成。交叉口控制逻辑是指使受控无人驾驶公交车辆互不冲突地按各自的设定路线通过交叉口的协同控制指挥方法,包括但并不限于交错模式、虚拟信号灯模式、混合模式,应用时可以根据具体情况选用。交错模式是指通过控制车辆到达冲突区域的时间差,在专用相位开启时各方向车辆同时放行,交错通过冲突点,这种通行模式对控制精度要求高,因时间利用充分,通行效率较高;虚拟信号灯模式是指在无人驾驶公交相位中虚拟出不同转向的信号灯相位供无人驾驶公交车通行,通行过程没有冲突点,在专用相位开启后,各进口按照虚拟相位顺序放行,这种虚拟相位对控制精度要求较低,时间利用逊于前者;混合模式是指交错模式与虚拟信号灯控制的结合,是有部分冲突点,有几个进口共用一个虚拟相位,时间利用介于前两者之间。
2.5 专用道站点
专用道站点包括公交站点和备用车停靠站。公交站点设置可根据需要选择路边停靠站、港湾停靠站、枢纽停靠站等形式。备用车停靠站按需布置于无人驾驶公交专用道外侧,可独立设置成港湾停靠形式,也可与公交港湾站结合布置。备用车停靠站供备用无人驾驶公交车停靠,可配备能源补给装置。无人驾驶公交专用道系统还包括调度中心,调度中心能够向无人驾驶公交车辆下发任务和导航指令,以及指令当前无任务的无人驾驶公交车辆自动驶向指定的备用车停靠站停靠待命或补充能源。备用车辆可根据客流需求随时加入或退出运营,更好地平衡客运的供需变化,高效利用客运资源。
无人驾驶公交专用道系统中的部分公交港湾停靠站或者备用车停靠站可正对布置于一段道路的两侧,无人驾驶公交车辆可利用正对设置的公交停靠站或备用车停靠站进行车辆掉头。
3 应用方法说明
无人驾驶公交专用道系统能够适应多种无人驾驶公交的运行模式,包括固定线路的常规公交运营模式、需求响应式公交运营模式等。以下结合图4对无人驾驶公交专用道系统可实施的需求响应式公交运营模式的应用方法进行简要说明。需求响应式无人驾驶公交的运行过程如下:
(1)运营开始,车辆由公交车场出发,到达公交停靠站接客或到达指定备用车停靠站等待接客任务;
(2)公交调度中心根据乘客需求实时定制线路,车辆按照定制线路站点顺序到达各个公交站点上客或下客,并可按路径导航在路段停靠站或交叉口掉头;
(3)乘客下完并且没有新的乘客,车辆行驶至指定的备用车停靠站等待新的接客任务或补充能源;
(4)车辆当天运营结束后,可进入公交车场。
需求响应式公交是按乘客需求实时定制线路,没有固定线路,无人驾驶公交车辆送完乘客后,在无后续接客任务时可停靠备用车停靠站。
与之相比,常规公交模式是按固定线路运营。由于无人驾驶的常规公交不需要驾驶员休息场所,起终点不设置传统的首末站,而是将车辆按乘客需求,停靠在备用车停靠站,车辆发车地点不一定在线路起终点,也可能在线路的中间某个重要的需求站点,因此,所使用的道路设置与响应式公交可以完全一致。由此可见,本文提出的无人驾驶公交专用道系统,既可实施需求响应式公交运营模式,也可实施常规公交的运营模式,有其显著的多模式适应性优势。
4 结 语
无人驾驶公交专用道系统的积极进步效果在于:可以为诸如L4级无人驾驶公交车辆提供场景简单、监控全面、能充分发挥协同驾驶作用的运行环境,并有助于协同控制无人驾驶公交车辆在城市道路环境中安全行驶,避免造成与其它车辆或行人的相互冲突和干扰,以及适用于多种公交运营模式。从长远来看,无人驾驶技术应用于公交专用道系统可大幅降低常规公交运营成本,是公交系统发展的新契机。
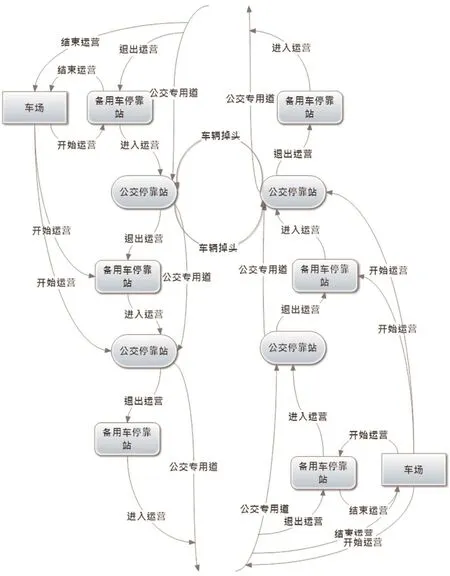
图4 需求响应式无人驾驶公交运营模式
猜你喜欢
建材发展导向(2022年14期)2022-08-19
建材发展导向(2021年19期)2021-12-06
作文小学高年级(2019年1期)2019-01-10
汽车实用技术(2018年7期)2018-05-18
浙江交通职业技术学院学报(2018年4期)2018-02-13
中国自行车(2017年5期)2017-06-24
中国交通信息化(2017年12期)2017-06-06
语文世界(初中版)(2015年6期)2015-10-28
基层建设(2015年10期)2015-10-21
运输经理世界(2015年12期)2015-05-14
