
改进的SVPWM异步电机矢量控制
2020-04-23 13:36付光杰张旭东石英辰张梦迪江雨泽
吉林大学学报(信息科学版) 2020年1期
付光杰,张旭东,石英辰,张梦迪,江雨泽
(1.东北石油大学 电气信息工程学院,黑龙江 大庆 163318;2.哈尔滨科学技术职业学院 现代服务学院,哈尔滨 150300)
0 引 言
异步电机具有结构简单、价格低廉、运转稳定、效率高和适用性强等诸多优点[1-2],可拖动各种机械,在许多领域有广泛的应用[3],尤其是石油生产,在油田的采油、钻井和注水等多方面都需用异步电机驱动装置和相关设备以达到工作要求。其调速方式和变频调速的基本原理被人们所熟悉,控制方式的研究也渐渐成为人们关注的热点。
目前,大多数的变频调速系统采用转子磁场定向矢量控制[4]。异步电机矢量控制技术克服了普通变频器低速负载特性差的不足,具有低速大转矩特征,能实现抽油机系统软启动、负载跟踪和功率自动匹配等。空间矢量控制(SVPWM:Space Vector Pulse Width Modulation)技术的优点是电压利用率高、输出电压的谐波含量低[5-6],但作用时间的计算相对复杂,且控制精度较低,响应速度较慢。所以,笔者采用矢量控制作为异步电机的控制方式,并针对抽油机的异步电机对负载变化和快速性等的要求,改进SVPWM控制,省去过多的三角函数运算,节约计算时间,使电机在负载波动、转速的跟踪性和稳定时间上表现出一定优势。
1 异步电机矢量控制的基本原理
矢量控制的实质是利用Clark和Park变换实现等效控制的目的[7],根据磁场定向原理分别控制磁链和转矩两个分量[8-10],从而实现正交解耦的目的。再通过电流闭环控制,抑制电流微分方程中的非线性和交叉耦合,使实际产生的电流对给定值具有较快的跟踪能力,实现模拟直流电机的效果。图1是异步电机矢量控制框图。

图1 异步电机矢量控制框图
由图1可知,通过电机转速ωref计算电磁转矩Tem,再与给定转矩值Temref相比较,Temref由转速环得到,一般采用PI(Proportional Integral)控制,所得差值再经PI控制输出电压分量U1Tref。由电机转速ωref计算转子磁链ψ2,与给定转子磁链ψ2ref对比,二者差值再经PI控制输出电压分量U1Mref,U1Tref和U1Mref经过Park逆变换,得αβ坐标系上的两个电压分量U1αref和U1βref,最后通过SVPWM控制产生逆变器的桥臂开关状态所需的脉冲波形,从而控制电动机工作,输出给定转速,完成异步电机的矢量控制。
2 SVPWM控制
2.1 基本电压空间矢量控制原理
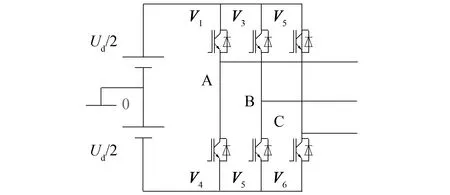
图2 两电平三相全桥逆变器拓扑结构
SVPWM是现代交流电机控制中最常用的一种逆变方式,其算法简单且易理解。电压空间矢量控制能大大减少电机和输出电流中的谐波成分,减小脉动转矩,再加上其具有较高的电压利用率,所以在各个领域得到了广泛应用。传统SVPWM以伏秒平衡原则为理论基础[11],逆变器的拓扑结构如图2所示[12]。图3是电压矢量空间与扇区号的分配示意图,根据A、B、C 3个桥臂导通和关闭状态的组合得相应的电压矢量[13]。
如图4所示,每一时刻的电压矢量Uout由其所在扇区的两个非零矢量和零矢量通过线性计算合成[14]。作用时间的不同,产生的电压值也就不同。先作用的有效电压矢量作用时间用t1表示,后作用的有效电压矢量作用时间用t2表示,零矢量的作用时间可由t=t1+t2+t0计算得出,其中t0为零矢量的作用时间,t1、t2的计算涉及较多的三角函数问题,算法较为复杂。

图3 电压矢量的空间与扇区分配 图4 电压空间矢量合成图Fig.3 Space and sector allocation of voltage vector Fig.4 Synthesis of voltage space vector
2.2 改进的SVPWM作用时间
为方便运算,将电压的各个扇区号进行顺序调整。如图5所示,3个扇区中的参考矢量的电压相等,若其分解到各有效矢量上所形成的平行四边形的形状完全相同,即具有全等的关系,则参考矢量的作用就呈现相同或相反的关系,其他扇区的作用时间可通过一个扇区的作用时间得到,减少了部分计算量。
当参考矢量都位于α轴的上方,即各扇区中的矢量与α轴所成的角度为正。令矢量V4、V6的作用时间为t11、t12,电压矢量V2、V6的作用时间为t21、t22,电压矢量V2、V3的作用时间为t31、t32,当参矢量分解成的平行四边形全等,即有t11=t22=t31,t12=t21=t32。则扇区2和扇区3中有效矢量作用时间可通过求第1个扇区的时间得出。
同理可得,在α轴下方(见图6),若V4、V5的作用时间为t61、t62,V5、V6的作用时间为t52、t51,V6、V3的作用时间为t41、t42,即有t61=t52=t41,t62=t51=t42。则根据上述理论,可省去计算扇区4和扇区5的作用时间,利用扇区6的时间替代即可。
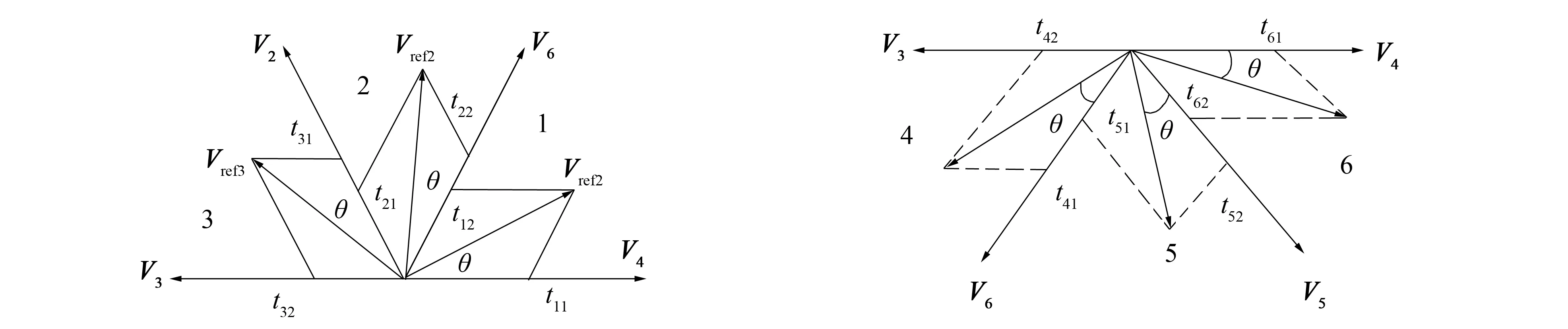
图5 参考矢量合成图 图6 参考矢量合成图Fig.5 Reference vector synthesis map Fig.6 Reference vector synthesis diagram
参考矢量的角度转化公式为

(1)
其中N为电压所在扇区号,θ为参考矢量未旋转前与α轴间的夹角。
引入相关变量
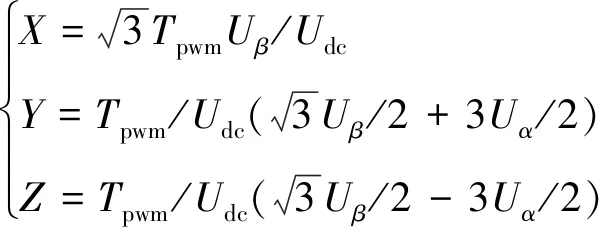
(2)
其中Uα为电压矢量在α轴上的分量,Uβ为电压矢量在β轴上的分量,Tpwm为载波周期。各扇区的作用时间如表1所示。

表1 各扇区的作用时间
3 仿真结果
通过搭建模型仿真验证所提方法的可行性。采用45 kW的异步电机,其额定值及相关参数如下:UN=380 V,f=50 Hz,定子电阻R1=0.151 Ω,转子折算电阻R2=0.035 3 Ω,铁耗等效电阻Rm=5.372 Ω,定、转子互感Lm=0.014 3 H,定、转子漏电感L1=L2=0.000 6 H,J=0.1 kg·m2。给定的转速阶跃值为300 r/min,启动时负载为零,仿真时间在0.4 s时,令负载TL=4 N·m,在t=0.7 s时,令TL=1 N·m,得电机转速波形如图7所示。在电动机加载的瞬间,其转速受负载变换的影响产生了较小的波动,但在改进的SVPWM下能迅速地调整转速,使电动机转速能稳定跟踪变化的转速,对给定值具有良好的动静态跟踪能力,基本实现了在抽油机领域电动机对于负载的工况需求。
当给定转速为700 r/min时,同样使电机空载启动,改进和基本的SVPWM控制下的转速仿真曲线如图8所示。由图8可见,改进控制下的转速超调较小,在短时间内达到平稳,效果较好。

图7 电机转速波形与时间的关系 图8 转速对比波形
同样当电机转速为700 r/min时,0.4 s时电机负载TL=6 N·m,0.7 s时负载变为1 N·m,电机的转速波形如图9所示。由图9可见,负载的变化引起转速微小的震荡,但电机具有较好的抗扰动性,快速恢复了平稳状态。
当设置转速阶跃值为900 r/min,电机以空载状态启动运行,t=0.5 s时转速变化到1 050 r/min。两种控制方法下的转速对比波形如图10所示。由图10可见,改进的SVPWM上升速度较快,且在转速上升过程中能进行精准的跟踪控制,避免出现大的超调。
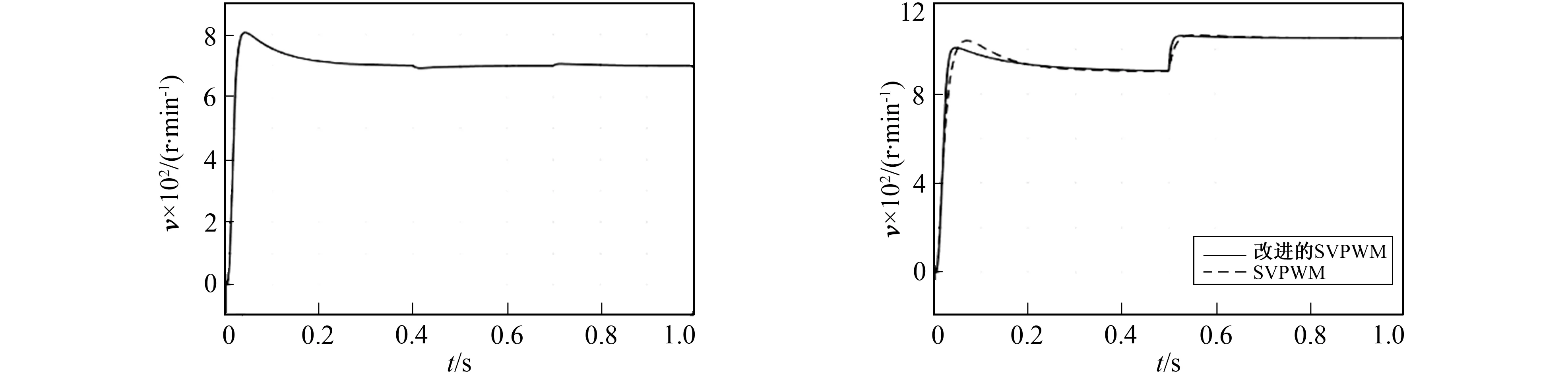
图9 电机的转速与时间关系波形 图10 转速波形对比图Fig.9 Relationship waveform of speed and time Fig.10 Comparison of speed waveformsmotor
图11显示异步电机能迅速达到最大转速1 480 r/min,并以最大转速运行时仍具有可靠的稳态精度。在0.6 s时令负载TL=7 N·m,0.8 s后突减到2 N·m,1.5 s时再变为6 N·m,1.8 s时变为1 N·m,所得波形如图11所示。电机转速受负载变化的影响虽然有较小的浮动,但能以较快速度进行调整进而达到稳态。
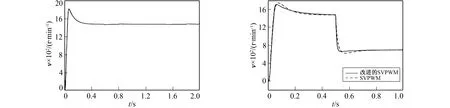
图11 改进的SVPWM转速波形 图12 转速对比波形图Fig.11 Improved SVPWM speed waveform Fig.12 Speed comparison waveform
当起始时刻的转速给定值为1 480 r/min,仿真时间t=0.5 s时将转速调节至700 r/min,所得对比波形如图12所示。电机转速在改进的SVPWM控制下达到稳定的时间也相对较短,转速发生变化时也能精准定位跟踪。
当电机转速为900 r/min时,两种控制方法下的电流波形如图13所示。从仿真波形对比可见,改进的SVPWM的电流波动幅度较小,且达到稳定的时间较快。
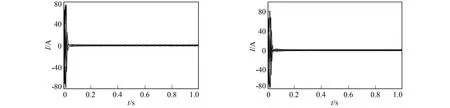
a 改进的SVPWM下的电流波形 b 传统的SVPWM下的电流波形
当电机转速设置为1 480 r/min,在t=0.5 s时转速突变为700 r/min,两种控制方法下的电机转矩波形如图14所示。由仿真波形对比可见,改进SVPWM的转矩波形下降速度更快,当遇到转速扰动时,稳定时间也较传统SVPWM更快。
当电机转速为1 000 r/min时,改进的SVPWM磁链波形如图15所示。从仿真波形可见,磁链达到稳定时间短,稳态误差较小,精度高。

图14 两种控制方法下的转矩对比波形 图15 磁链波形Fig.14 Comparison of torque waveforms under two control methods Fig.15 Flux waveform
表2为两种方法下的超调量和时间对比。由表2可见,优化的SVPWM在相同转速或负载变化情况下具有跟踪性和快速性的优势。

表2 改进的SVPWM和SVPWM下的超调量和时间
综上所述,改进的SVPWM和SVPWM相比超调量有所降低,响应时间较快,验证了该控制算法比传统SVPWM具有一定的优越性。
4 结 语
笔者分析了异步电机中的矢量控制作用时间,利用扇区中参考矢量之间的转化简化计算量。仿真结果表明,该控制系统在启动后能较快达到设定的转速,且超调量小。通过给定抽油机中的负载变化特性发现,电机的转速有较小的波动,且会较快稳定在设定的转速上;在电机的设定转速发生变化时,电机的转速有较小的超调量后迅速达到设定转速。该方法提高了异步电机矢量控制系统的实时性,具有一定的推广价值。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
南北桥(2022年2期)2022-05-31
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
中国民航大学学报(2019年1期)2019-04-13
航空学报(2018年12期)2019-01-18
电脑知识与技术·经验技巧(2017年9期)2018-02-24
组合机床与自动化加工技术(2014年10期)2014-03-01
