选取任意庞加莱截面的新方法*
2020-02-28 10:57:38张识王攀张瑞浩陈红
物理学报 2020年4期
张识 王攀 张瑞浩 陈红
(黑龙江大学电子工程学院, 哈尔滨 150080)
针对用庞加莱截面分析非线性系统时较难选择合适截面的问题, 提出了一种投影时域法.该方法可以在时域上直观地判断所选平面是否合适并实时准确地调整平面的方向与位置.文中给出了投影时域法的完整定义并从理论上详细分析了该方法的原理; 同时研究了在时域上判断所选平面是否是合适的庞加莱截面的条件以及如何调整所选平面的方向与位置; 最后, 利用投影时域法对三种典型的三维或四维非线性系统进行了仿真实验, 实验结果证明了该方法的有效性和实用性.
1 引 言
在研究非线性系统的过程中, 庞加莱截面法可以有效地降低分析非线性系统的难度: 首先, 庞加莱截面将系统的连续轨线转换为离散的点, 并且保留了系统的部分拓扑结构, 成为连接离散与连续信号的重要桥梁; 其次, 庞加莱截面可以降低系统的维数; 最后, 庞加莱截面可以直观地反映系统的内部结构.这些特征使庞加莱截面法被广泛地运用于量子力学[1−2]、语音识别[3−4]、医学研究[5]和物理电子学[6]等领域.用庞加莱截面法对非线性系统进行分析时大多采用计算机数值仿真[7−10]或硬件系统实现[11−13]的形式.
选择合适的平面作为庞加莱截面是运用庞加莱截面法分析非线性系统的关键.一个经典的局部庞加莱截面的选取方法是在系统轨迹上选取任意一点作为初始点, 计算该点邻域内所有系统轨迹的平均方向向量, 这样, 所选截面就被确定为穿过该初始点并以平均方向向量为法向量的平面[14].局部庞加莱截面的选取方法仅仅适用于截取系统轨迹的一部分, 并且初始点选取的不同也会影响截面的截取效果[15].
目前仍然缺少一种普适的和便捷的选择全局庞加莱截面的方法[16].一些研究者将全局庞加莱截面的选择方法视为庞加莱截面参数的优化问题,通过算法来寻找最优解: Krzysztof[17]列举了可以用于优化庞加莱截面参数的几类算法, 并使用进化算法针对几个时间序列找到了合适的庞加莱截面,以此判断该时间序列是否是随机信号; Babak和Amir[18]提出了利用香农熵作为判断庞加莱截面位置是否合适的依据, 通过大量的计算针对一组离散时域信号找出了最合适的庞加莱截面.这些基于算法的全局庞加莱截面选择方法从各自研究角度恰当地利用庞加莱截面取得了研究成果, 但是难以实时观测分析, 并且只能得到某个方向与位置固定的庞加莱截面, 不便于研究者自由地调整截面的方向与位置.但是, 不同系统、不同研究者对于庞加莱截面的需求不同, 例如: Atefeh 和 Ateke[19]在对PPG信号进行分析时, 通过变换角度的方式选择了多个特定角度的平面作为庞加莱截面; Carlos和Daniel[20]选取了一个平行于x轴和z轴的平面作为截面, 以此设计出一个基于混沌的保密通信系统; 闫登卫等[21]则分别选取了平面 x =5 和y=0对一类基于忆阻器的混沌系统进行分析.对此, 本文提出了一种在时域上选择全局庞加莱截面的方法—投影时域法(Projection Time Domain method,PTD法).该方法既能够在时域上直观地反映系统轨道与所选平面的相交情况, 又能够实时准确地调整所选平面的方向与位置, 从而选取任意方向与位置的平面作为截面, 可以有效地降低选择全局庞加莱截面的难度.
2 PTD法的定义及分析
为了方便快捷地针对不同的非线性系统选择合适的庞加莱截面, 本文提出的PTD法定义如下:在三维空间里, 系统 d L/dt=f(L),(L=l1,l2,l3) 的三路时域输出分别为 l1(t),l2(t),l3(t) .将系统轨道沿着 z 轴方向投影到任意不平行于 z 轴的平面Σ :αx+βy+γz+ λ =0(γ0)上, 将投影线的z轴坐标随时间演化的轨迹记为F(l1(t),l2(t))=Al1(t)+Bl2(t)+C .记 l3(t) 为参考信 号 , F (l1(t),l2(t)) 为 平 面 信 号 , 当 且 仅 当F(l1(t),l2(t))=l3(t)时, 系统轨道与平面 Σ 相交,平 面 Σ 截 取 了 系 统 轨 道.若 存 在 一 组 参 数A0,B0,C0, 使得 F (l1(t),l2(t)) 与 l3(t) 交点个数较多且交点集中于 l3(t) 的每个增幅振荡区域, 则F(l1(t),l2(t)所在平面Σ0:A0x+B0y−z+C0=0为合适的庞加莱截面.
该方法首先选择非线性系统的一路时域输出作为参考信号, 之后将这个非线性系统余下的所有时域输出通过比例相加的方法产生一路时域信号,称之为平面信号.这个时域上的平面信号对应着相空间中的一个特定平面.通过在时域上直接观察参考信号与平面信号的交点来判断对应平面是否为合适的庞加莱截面.如果在时域中平面信号与参考信号的交点个数较多且交点集中于参考信号的每个增幅振荡区域, 则该平面信号对应的平面是合适的庞加莱截面.
在三维相空间中, 将系统轨道沿着z轴坐标方向投影到任意不平行于 z 轴的平面 Σ 上, 则投影线与系统轨道具有相同的 x ,y 轴坐标, 系统轨道与平面 Σ 的相交关系可以通过比较投影线z轴坐标与系统轨道z轴坐标来判断(图1).

图1 轨道在平面上的投影Fig.1.The projection of a trajectory onto a plane.
在图1中, 实线为系统轨道, 虚线为被平面Σ遮挡的系统轨道, 点划线为系统轨道沿着z轴方向投影到平面 Σ 上的投影线.点 D1是系统轨道上的任意点, 其 z 轴坐标用 l3(t) 表示; 点 D2是点 D1在平面 Σ 上的投影点, 其 z 轴坐标用 F (l1(t),l2(t)) 表示.在相空间中系统轨道随着时间演化不停地远离或者靠近平面 Σ , 这种靠近或远离的趋势可以用F(l1(t),l2(t))与 l3(t) 的差值来度量, 称F(l1(t),l2(t))为对应平面 Σ 的平面信号, 并称 l3(t) 为参考信号.如果平面信号与参考信号的差值为0, 则在相空间中系统轨道穿过了平面 Σ .分别做出平面信号与参考信号的时域波形(图2).

图2 F (l1(t),l2(t)) 与 l3(t) 的波形Fig.2.Waveform of F (l1(t),l2(t)) and l3(t) .
在图2 中, 实线 l3(t) 为参考信号, 表示系统轨道的 z轴坐标随时间演化的轨迹; 点划线F(l1(t),l2(t))为平面信号, 表示投影线的z轴坐标随时间演化的轨迹.参考信号与平面信号的每一个交点都表示在相空间中系统轨道穿过了一次平面Σ.
相空间中, 任意一个不平行于z轴的平面 Σ 的一般式方程为

整理 (1)式后, 得

简化 (2)式, 令A= −α/γ,B= −β/γ,C= −λ/γ,则

由(3)式可知, 对于平面 Σ 上任意一点的x,轴坐标值, 其z轴坐标值为 F (x,y) .将投影线的x,y 轴坐标值代入 (3)式, 令 x =l1(t),y=l2(t) (投影线和系统轨道具有相同的 x ,y 轴坐标), 则投影线的z轴坐标为

(4)式即为平面信号的函数表达式.若改变参数 A ,B,C , 平面信号的时域波形发生改变, 平面Σ在相空间中的方向与位置也会相应变化.平面信号可以视作为非线性系统两路时域输出 l1(t),l2(t) 的比例相加, 叠加的比例分别由参数 A ,B 控制, 故改变参数 A ,B 可以调整平面信号的形状; 参数C作为(4)式中的常数项, 改变参数C可以上下平移平面信号.
为保证平面 Σ 是合适的庞加莱截面, 应当改变平面信号的参数 A ,B,C , 调整平面信号的形状, 使平面信号满足某些条件.下面分别从平面信号与参考信号交点的数量、平面信号与参考信号交点的位置两个方面分析平面信号需要满足的条件.
在交点的数量上, 参考信号与平面信号的交点个数反映了相空间中平面 Σ 与系统轨道的交点个数.在时域上参考信号与平面信号的每一个交点都对应着相空间中平面 Σ 与系统轨道的一个交点.因此, 截取一段时间内的平面信号和参考信号, 如果该时段内参考信号与平面信号的交点个数较多, 则在相空间中系统轨道穿过平面 Σ 的次数较多; 如果该时段内参考信号与平面信号的交点较少, 则在相空间中系统轨道穿过平面 Σ 的次数较少.平面信号与参考信号交点的数量可以直观但粗略地对平面Σ进行评价.
进一步地, 平面信号与参考信号交点的位置可以明确地判断平面 Σ 是否为合适的庞加莱截面.在时域上, 系统轨道的涡卷与键带的波形具有明显的差异, 增幅振荡正是涡卷在时域上表现出的显著特征(图3)[22].
在图3中, 涡卷在相空间中的轨道是螺旋扩张运动, 参考信号在时域上的波形表现为振幅逐渐增大?的振荡运动, 称这部分时域波形为参考信号的涡卷部分; 键带的相轨将两个涡卷连接起来, 参考信号在时域上的波形表现为单向运动, 称这部分时域波形为参考信号的键带部分.如果在时域上平面信号与参考信号交于参考信号的涡卷部分, 则在相空间中平面 Σ 切入了系统轨迹的涡卷; 如果在时域上平面信号与参考信号交于参考信号的键带部分, 则在相空间中平面 Σ 切入了系统轨迹的键带.参考信号与相空间中系统轨迹的联系对平面信号与参考信号交点的位置作出了明确的要求:

图3 涡卷的相轨与波形 (a)相轨; (b)波形Fig.3.Phase trajectoy and waveform of vortex: (a) Phase trajectoy; (b) waveform.
首先, 平面信号应当与参考信号的所有涡卷部分都相交.一个非线性系统可能拥有多个涡卷, 这些涡卷在相空间中处于不同的位置; 相应地, 参考信号的涡卷部分也会处于不同的高度上(参照本文实验部分的三涡卷Chua系统).如果平面信号与参考信号的所有涡卷部分都相交, 则在相空间中平面 Σ 切入了系统轨迹的每一个涡卷.
其次, 平面信号应当与参考信号涡卷部分的每一次振荡都相交.参考信号涡卷部分中的每一次振荡都表示在相空间中系统轨迹进行了一次螺旋运动, 即涡卷又向外扩张了一圈.如果在时域上平面信号与参考信号涡卷部分的每一次振荡都有交点,则在相空间中平面 Σ 切入了系统轨迹中这个涡卷的每一圈.
综上, 平面信号应当满足的两个条件如下:
1)参考信号与平面信号的交点数量足够多;
2)参考信号与平面信号的交点集中于参考信号的每个增幅振荡区域.
其中1)确保了平面 Σ 与系统轨道有足够多的交点, 2)确保了平面 Σ 切入系统轨道的每个涡卷.
3 任意截平面的选取
除了选择与系统轨道充分相交的截面, 某些场合也需要选择具有特定方向与位置的平面 Σ 作为截面.这里对平面信号的参数 A ,B,C 的几何意义进行定量的分析, 以便对平面 Σ 的方向与位置施加准确的控制.
由(3)式, 平面 Σ 可以用下式描述:

式中, 平面 Σ 的法向量为 (A,B,−1) , 这说明改变参数 A ,B 可以调整平面 Σ 的方向; 参数C作为常量出现, 改变参数C的值可以调整平面 Σ 在相空间中的水平高度.
本文使用平面 Σ 与x轴正方向的夹角 θ1和平面 Σ 与y轴正方向的夹角 θ2描述平面 Σ 的方向.当夹角 θ1,θ2的数值确定时, 平面 Σ 的方向也随之确定.取x轴正方向的向量为 (1,0,0) , y轴正方向的向量为 (0,1,0) , 则 θ1,θ2可表示为

改变参数 A ,B 的值, 夹角 θ1,θ2相应地发生变化, 平面 Σ 的方向也会发生变化.可以根据研究需要选定夹角 θ1,θ2, 通过(6)式求出参数 A ,B .下表列出了一些由(6)式确定的常用平面所对应的参数 A ,B .
令平面 Σ 改变前与改变后的参数值分别为C1,C2, 则

若 ∆ C 的符号为正, 说明平面 Σ 沿着z轴正方向整体平移了 | ∆ C| 的距离; 若 ∆ C 的符号为负, 说明平面 Σ 沿着 z轴负方向整体平移了 | ∆ C| 的距离; 若∆C 的值为0, 说明平面 Σ 在z轴方向没有发生移动.
(6)式与(7)式定量地描述了参数 A ,B,C 对平面 Σ 方向与位置的影响, 通过改变参数 A ,B 调整平面 Σ 的方向, 改变参数C调整平面 Σ 的水平高度, 使用者总能调整出符合要求的平面 Σ 作为庞加莱截面.
4 仿真实验
本节以Lorenz系统、三涡卷Chua系统[23]和超混沌Chen[24]系统为例, 通过仿真实验验证PTD法的有效性与可行性.其中Lorenz系统为有翼混沌系统的代表, 三涡卷Chua系统为多涡卷混沌系统的代表, 超混沌Chen系统为高维超混沌系统的代表.实验中所有的系统均采用四阶龙格库塔法进行迭代仿真, 对每个系统都选取多组平面进行分析.
4.1 Lorenz系统
Lorenz系统的归一化的系统方程为

当a=10,b=2.667,c=28时, Lorenz 系统处于混沌状态.Lorenz系统在相空间中的系统轨道表现为两个翅膀.本实验将以Lorenz系统为例说明如何调整平面信号的参数以寻找到合适的庞加莱截面.
在系统轨迹未知的前提下, 首先任意选择一个平面.选择与x轴正方向夹角为0度, 与y轴正方向夹角为45º的平面作为截面.由表1知, 平面信号的参数 A ,B 应当设置为 A =0,B=1 , 参数C的设置没有要求, 设置 C =0 , 实验结果如图4所示.
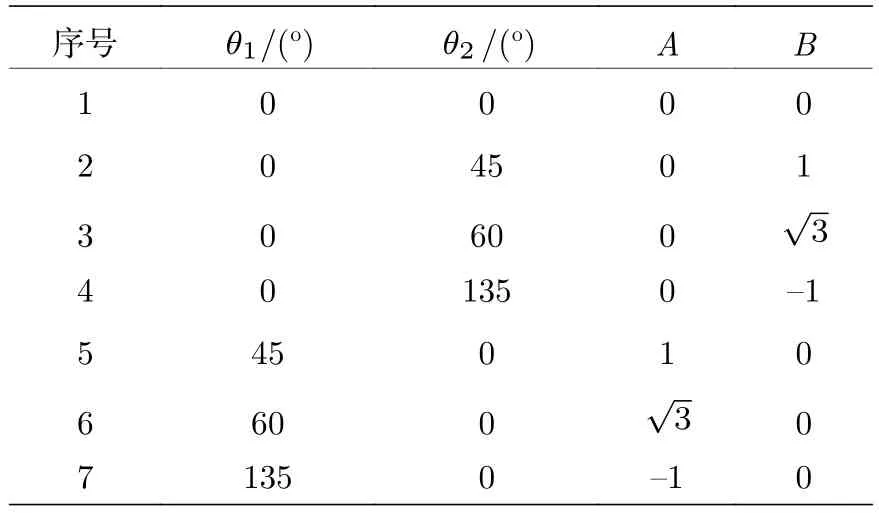
表1 常用平面的参数值Table 1.Parameter values of typical planes.

图4 平面一的实验结果 (a)时域波形; (b)相图Fig.4.Experimental results of the first plane: (a) Waveform; (b) phase diagram.

图5 平面二的实验结果 (a)时域波形; (b)相图Fig.5.Experimental results of the second plane: (a) Waveform;(b) phase diagram.
在图4(a)中, 蓝色实线为参考信号, 红色点划线为平面信号, 参考信号与平面信号的时域波形形状不同, 并且水平高度不同, 在图4(a)时域范围内参考信号与平面信号仅有两个交点.相对应地, 在图4(b)中, 截面与系统轨道并没有充分相交, 该平面仅仅切入了系统轨道的一小部分右翼.在图4(b)中, 截面平行于 x 轴, 与 y 轴正方向夹角为 45º, 与本次实验想要选择的方向相符.
在图4(a)中, 参考信号与平面信号不处于同一水平高度上, 不改变平面一的方向, 保持参数A,B不变, 只改变平面一的高度, 将参数C设置为C=25, 由此得到平面二的实验结果(图5).
在图5(a)中, 蓝色实线为参考信号, 红色点划线为平面信号, 调整位置后, 平面信号与参考信号的交点个数显著增多.相对应地, 在图5(b) 中, 系统轨道与截面的交点个数也显著地增多.
在平面二的基础上, 尝试调节所选平面的方向, 使平面信号与参考信号的交点尽可能地集中于涡卷部分.图6为调整后的平面三的实验结果, 选取的参数为 A =1,B=−1,C=25 .
在图6(a)中, 蓝色实线为参考信号, 红色点划线为平面信号, 参考信号与平面信号交点较多, 且集中于参考信号的涡卷区域.在图6(b)中, 所选平面的方向发生了变化, 与系统轨道充分相交.该平面截取到了系统轨道的双翼, 是合适的庞加莱截面.
4.2 三涡卷Chua系统
Chua系统因电路实现简单、动力学行为丰富而受到学者的广泛研究和应用.三涡卷Chua系统是Chua系统的一种变形, 其表达式如下:
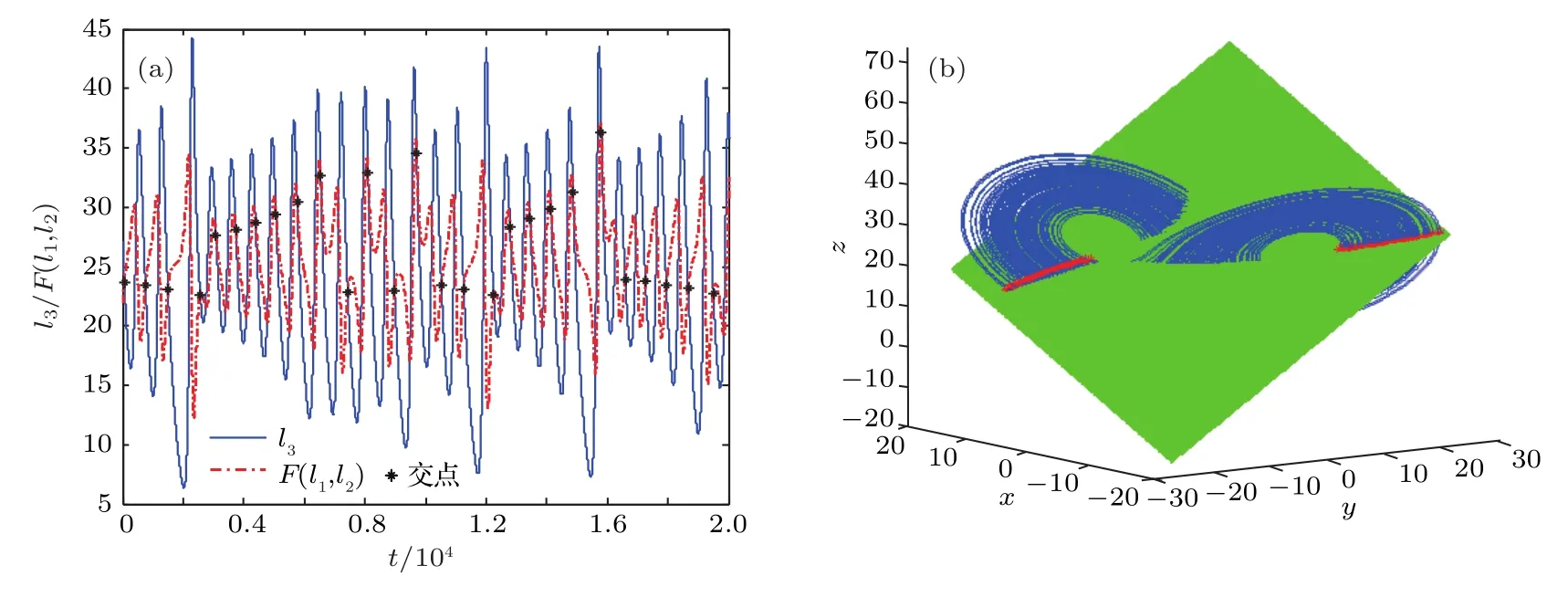
图6 平面三的实验结果 (a)时域波形; (b)相图Fig.6.Experimental results of the third plane: (a) Waveform; (b) phase diagram.

图7 平面一的实验结果 (a) C = 0 时的波形; (b) C = 0 时的相图; (c) C = 1.5 时的波形; (d) C = 1.5 时的相图; (e) C =–1.5 时的波形; (f) C = –1.5 时的相图Fig.7.Experimental results of the first plane: (a) Waveform while C = 0; (b) phase diagram while C = 0; (c) waveform while C =1.5; (d) phase diagram while C = 1.5; (e) waveform while C = –1.5; (f) phase diagram while C = –1.5.

式中, f是多项式函数, 其表达式为

当 a =12.8,b=19.1 时, 系统处于三涡卷混沌状态.本次实验中, 选取以下平面作为截面进行实验, 其中平面一是特定方向与位置的平面, 平面二是调整后合适的庞加莱截面:
平面一: 同时平行于x轴和y轴的平面.由表1可知, 参数 A ,B 设置为 A =0,B=0 , 本次实验对参数C设置了多组不同的数值, 实验结果如图7所示:
图7的实验结果证明: 首先, 调整参数C可以控制平面信号的水平高度, 同时使平面在相空间中上下平移; 其次, 由于参考信号与平面信号波形不相似, 此时无论怎样调整平面信号的水平高度, 都无法得到满足选取条件的平面信号.
平面二: 选取满足选取条件的一组参数, 本实验中选取的参数为 A =−1,B=1,C=0 , 实验结果如下:
在图8(a)中, 蓝色实线为参考信号, 红色点划线为平面信号, 参考信号与平面信号交点数量较多, 在参考信号的每一处增幅振荡区域都产生足够多的交点; 在图8(b)中, 平面二截取到了系统轨道的三个涡卷, 该平面是合适的庞加莱截面.
4.3 超混沌Chen系统
超混沌Chen系统的归一化方程为

当a=35,b=3,c=12,d=7,r=0.5时, 系统处于超混沌状态.分别令 x ,y,z,w 中任意一个变量值为零, 得到超混沌Chen系统的某个三维相空间图, 并分别对其用PTD法选取合适的平面作为截面.以下为实验结果.

图8 平面二的实验结果 (a)波形; (b)相图Fig.8.Experimental results of the second plane: (a) Waveform; (b) phase diagram.

图9 w =0 时的实验结果 (a)波形; (b)相图Fig.9.Experimental results while w =0 : (a) Waveform; (b) phase diagram.
若令超混沌Chen系统 w =0 , 在 X oYoZ 相空间中观察系统轨道, 选取的平面信号参数为:A=0,B=−0.5,C=20, 实验结果如图9所示.
若令超混沌 Chen 系统 z =0 , 在 X oYoW 相空间中观察系统轨道, 选取的平面信号参数为:A=−0.5,B=−4,C=0, 实验结果如图10所示.
若令超混沌 Chen 系统 y =0 , 在 X oZoW 相空间中观察系统轨道, 选取的平面信号参数为:A=−1,B=−4,C=50, 实验结果如图11所示.

图10 z =0 时的实验结果 (a)波形; (b)相图Fig.10.Experimental results while z =0 : (a) Waveform; (b) phase diagram.

图11 y =0 时的实验结果 (a)波形; (b)相图Fig.11.Experimental results while y =0 : (a) Waveform; (b) phase diagram.

图12 x =0 时的实验结果 (a)波形; (b)相图Fig.12.Experimental results while x =0 : (a) Waveform; (b) phase diagram.
若令超混沌Chen系统 x =0 , 在 Y oZoW 相空间中观察系统轨道, 选取的平面信号参数为:A=−5,B=0,C=0, 实验结果如图12所示.
在本节实验中, 选取了三个典型的非线性系统进行分析, 实验结果表明: 时域上参考信号与平面信号的相交关系能够直观地反映相空间中所选平面与系统轨道的相交关系; 改变平面信号的参数可以调整平面信号的形状, 也可以准确有效地调整相空间中截面的方向与位置; 该方法能够针对不同的非线性系统分别选择不同的平面作为合适的庞加莱截面.
五 结 论
本文提出的PTD法是选择全局庞加莱截面的新方法.该方法不需要复杂的算法实现, 可以灵活地调整所选截面的方向与位置以满足不同系统、不同研究者对庞加莱截面的不同需求.PTD法将系统轨道投影到所选平面上, 利用两个时域信号的相交关系反映相空间中系统轨道与所选平面的相交关系, 可以在时域上直观地判断所选平面是否是合适的庞加莱截面.如果在时域中平面信号与参考信号的交点个数较多且交点集中于参考信号的每个增幅振荡区域, 则所选平面为合适的庞加莱截面.通过改变平面信号的参数可以实时准确地调整平面信号的形状和所选平面在相空间中的方向与位置, 使用者既可以快速寻找与系统轨道充分相交的平面, 又可以根据需要选择任意方向和位置的平面作为庞加莱截面.基于双翼Lorenz, 三涡卷Chua和超混沌Chen系统的仿真实验证明了PTD法对三维、四维、多涡和超混沌非线性系统均具有有效性和可行性.本文在分析和实验中选择了z轴作为投影方向, 针对待测系统的实际情况, 也可以选择x轴或者y轴作为投影方向.
猜你喜欢
中外文摘(2022年7期)2022-05-17 09:36:42
青年文摘(2021年20期)2021-12-11 18:45:12
文萃报·周五版(2021年44期)2021-12-06 20:05:14
现代应用物理(2021年3期)2021-11-10 13:08:24
学生导报·东方少年(2019年7期)2019-06-11 11:03:18
数学学习与研究(2017年11期)2017-06-20 00:02:38
青年时代(2017年3期)2017-02-17 01:40:47
浙江大学学报(理学版)(2016年1期)2016-05-14 09:12:47
电测与仪表(2015年14期)2015-04-09 11:55:54
许昌学院学报(2015年5期)2015-02-28 18:20:31