基于局部加权线性回归的城市公交车排放能耗预测
2019-12-12 02:59:34杨鹏史丁卉陈同刘永红
中山大学学报(自然科学版)(中英文) 2019年6期
杨鹏史,丁卉,陈同,刘永红
(1.中山大学智能工程学院, 广东 广州 510006;2.广东省交通环境智能监测与治理工程技术研究中心, 广东 广州 510275;3.广东省智能交通系统重点实验室,广东 广州510275)
公交车通常属于大型车,单车能耗较大,加之数量多、运行频次高,其环境影响应被重点关注[1]。传统的针对燃油燃气公交车环境影响的研究主要包括:①基本排放特征,即公交车排放因子与其行驶速度、VSP(vehicle specific power,机动车比功率)的关系,是建立机动车排放模型的基础[2];②外界排放影响因素,包括乘客载重、交叉口延误时间、停车次数等[3-4]。在城市道路中,多数情况下公交车与社会车辆处于混行状态。社会车辆运行状态深刻影响着公交车的行驶,使其排放能耗随之发生变化。陈峻[5]等基于断面检测数据,针对双向4车道和6车道分别建立了社会车辆和公交车的速度预测模型。ALAM等和本研究团队基于交通仿真或车辆实测运行数据分析了不同路网运行状态下公交车的排放特征,但未上升到评估模型层面[6-7]。近几年,纯电动、氢能源等新能源公交车开始崭露头角。2018年,广州市加大了对纯电动公交车的推广力度[8]。而,纯电动公交车与传统公交车在环境影响评估指标、规律上存在明显差异。利用GPS和车载诊断系统测试数据,HE等分析了纯电动公交车在不同VSP区间下的耗电功率[9]。针对大型公交网络下纯电动公交车的能耗,GALLET等则提出了一种基于低分辨率数据的纵向动力学计算模型,但未考虑社会车辆的影响[10]。
交通运行及减排管控措施正朝着精细化、动态实时的方向发展。现有的机动车模型多基于车辆自身的高分辨率运行参数[11-13],难以实现对大型公交车系统的动态预测;现有的公交车自动传输的GPS数据也常常存在时间间隔大、开放程度低的情况。因此,本文重点探究了将交通实时平台发布的社会车辆动态速度数据应用于公交车排放能耗预测的可行性;考虑社会车辆对公交车运行状态的影响,预测城市公交车的路段运行工况,建立了可面向传统燃油燃气公交车和纯电动公交车的环境影响(排放、耗电)预测模型。
1 研究方法与过程
从自主采集的广州市公交车逐秒GPS数据中,筛选出不同路段的GPS序列,结合社会车辆速度数据,构建公交车平均速度回归预测模型;对公交车在不同平均速度下的运行模式分布进行建模;最后将其应用于LNG(liquefied natural gas,液化天然气)公交车与纯电动公交车的排放能耗预测,并验证其可靠性(见图1)。
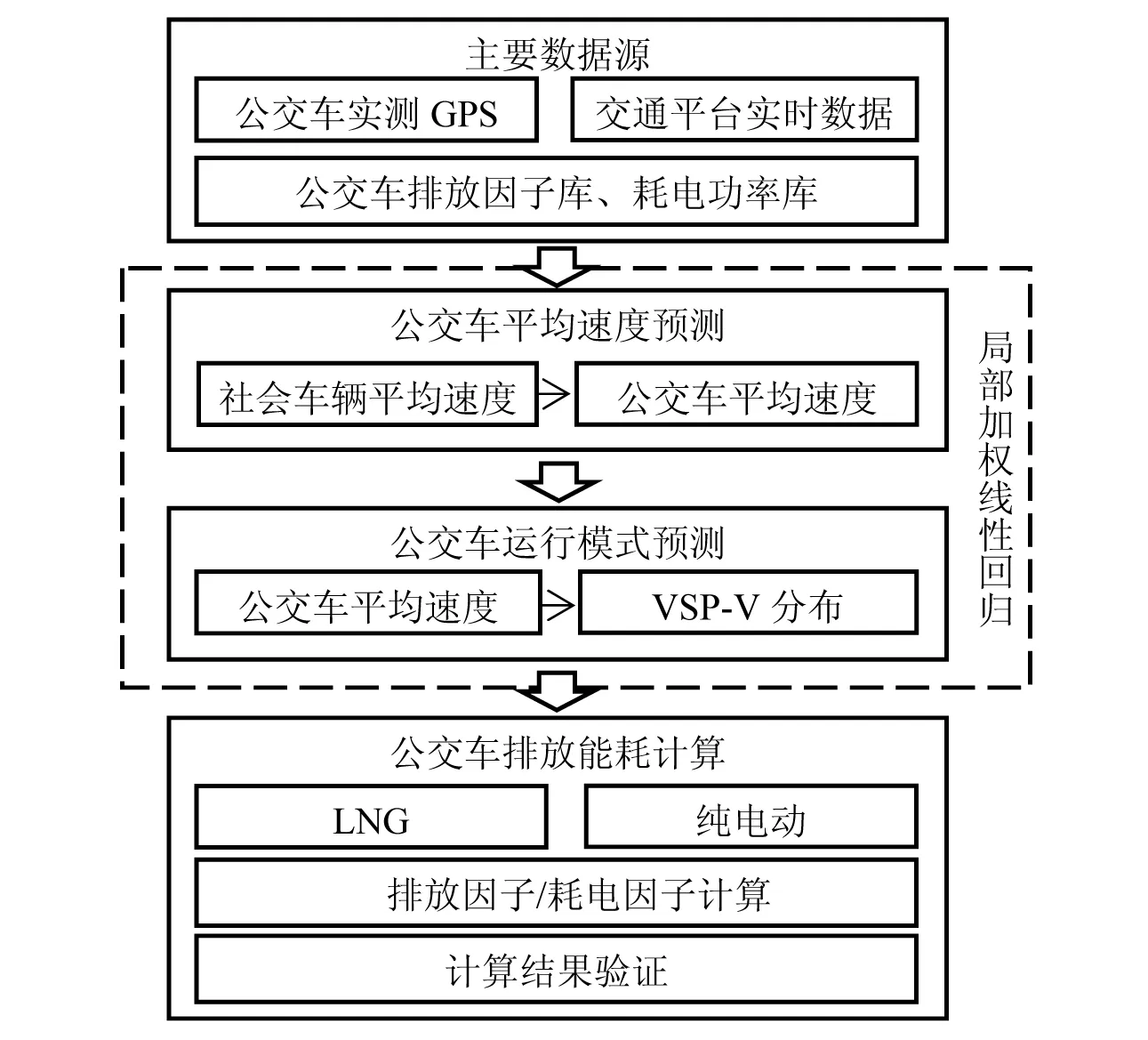
图1 技术路线Fig.1 Technology roadmap
1.1 主要数据源
主要数据为广州市中心城区公交车实际运行时的逐秒GPS数据,内容包括时间(精确到秒)、经纬度、速度、累积行驶里程等,由本研究团队于2015年10月至11月采集。采集方法是由实验人员随身携带GPS采集设备并搭乘公交车。本研究主要使用B7、B9、121线路公交车的采集数据,每条线路数据均覆盖周一、三、五、日,每天覆盖时段7:00-22:00,总测试趟数为133(首站至尾站为一趟)。
1.2 数据处理
研究主要面向路段区域的公交车运行工况和排放能耗。路段的选择原则为:①远离公交站和交叉口影响区域,参照LI等[14]的研究将路段与公交车或交叉口的距离下限定为100 m;②排除行人过街、停车场出入口等的影响;③避免过小的路段长度范围,最终得到的样本长度大多在250~400 m内;④覆盖不同的车道数、车道性质(混行车道和普通专用道)和时间段。
选定路段,从网站http:∥www.gpsspg.com/maps.htm中查询“谷歌地球”经纬度范围,对GPS数据源进行样本提取,每个样本均为一段GPS序列。总样本量为176,如表1所示。从中随机抽取一部分作为测试样本,测试样本量为42,其余作为构建模型的训练样本。

表1 公交车路段样本Table1 Samples of on-road buses
1.3 模型方法
1.3.1 平均速度处理 对于传统燃油燃气公交车,平均速度是评估排放的关键参数[15],而纯电动公交车的耗电因子同样与平均速度紧密联系。平均速度的计算如式(1)所示。
(1)
为了实现基于社会车辆影响的公交车平均速度预测,依据道路名称、道路方向和时间信息对每个公交车路段样本进行社会车辆平均速度匹配。社会车辆数据来自交通实时平台,具备连续不间断、覆盖面广、实时动态的特点,主要由城市道路中出租车所搭载的GPS设备采集所得,数据更新频率为10 min,用于代表社会车辆的运行状态。
1.3.2 运行模式分布计算 运行模式指车辆行驶过程中的刹车、怠速及加减速,关乎车辆排放、耗电的变化波动。衡量车辆运行模式的参数是VSP(kW/t),公交车的VSP计算方法如式(2)所示[9,15]。

+atvt+ 9.81vtsinαt
(2)
式中,vt为公交车瞬时速度,m/s;at为公交车瞬时加速度,m/s2;αt为道路坡度。
参照ZHANG和HE等[9,15]的运行模式划分方法,将VSP-v作为联合参数,划分为18个运行模式区间Bin,如表2所示。依据该划分原则,每个公交车路段样本可统计得到各个Bin的频率,即运行模式分布。
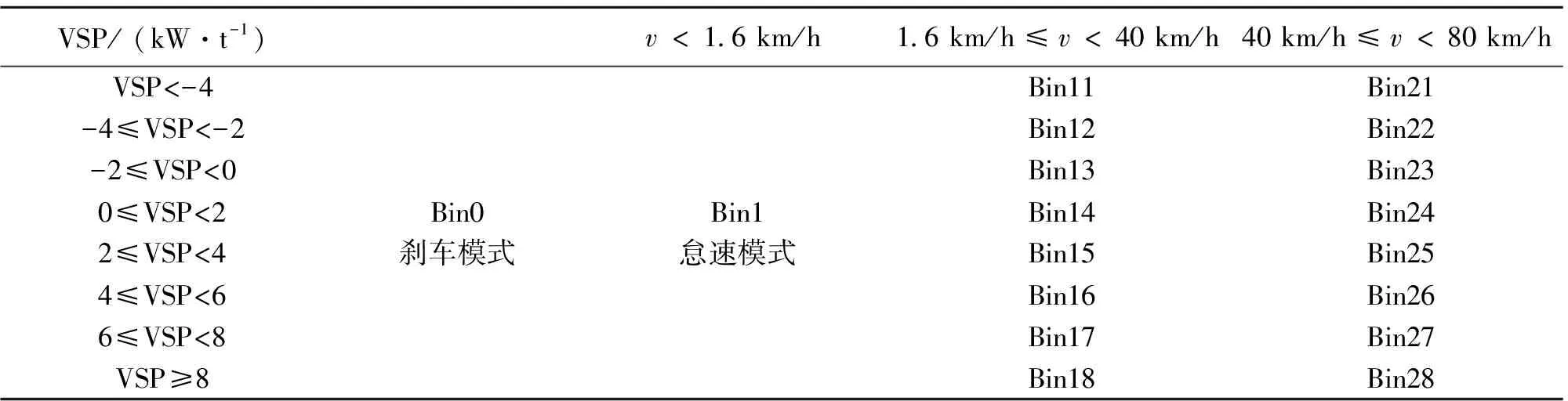
表2 运行模式区间划分Table 2 Divide of operation mode bins
1.3.3 运行工况建模方法 运行工况包括平均速度和运行模式分布两个指标。观察社会车辆和公交车的平均速度关系、公交车平均速度和运行模式分布的关系,发现其存在形态各异的非线性特征。为充分表征这类特征,采用局部加权线性回归(locally weighted liner regression,LWLR)预测公交车的平均速度和运行模式分布。LWLR是一种非参数的机器学习类算法,每预测一个新样本x时,均需基于已有训练样本拟合出新的回归系数θ,进而得到输出。单个样本x的特征矩阵(输入)表达为:
(3)
式中,n为每一个训练样本的特征数量。训练样本集的特征矩阵为:
(4)
训练样本的标签矩阵为:
(5)
式中,m为训练样本量。于是,x对单个新样本的预测结果为:
(6)
回归系数θ通过对测试样本集进行拟合得到,解析解为:
θ=(XTWX)-1XTWY
(7)
高斯核为:
(8)
式中,W为m×m对角线矩阵;w(i,i)作为W的对角线元素,是第i个训练样本的权重值,范围为(0,1];k为影响高斯核特性的参数。高斯核的基本特征是令距离测试样本较近的训练样本的权重较高,使其对线性回归结果影响较大;反之亦然。k值越高时,远距离训练样本的权重下降越慢。通过对一系列k值进行交叉验证(cross validation),可以确定具有最佳模型泛化能力的k值。
对社会车辆与公交车的平均速度关系进行建模时,以公交车平均速度作为样本标签,单个样本x的特征矩阵为:
(9)
式中,s为社会车辆平均速度,km/h。
对公交车平均速度与运行模式分布的关系进行建模时,以各个Bin的频率作为样本标签,单个样本x的特征矩阵则为:
(10)
式中,v为公交车平均速度,km/h。
1.3.4 排放能耗计算 燃油燃气公交车和纯电动公交车的环境影响指标分别为排放因子(g/km)和耗电因子(kWh /km)。在平均速度和运行模式分布的基础上,结合各运行模式下的排放速率或耗电功率,即可按照式(11)~(12)计算排放因子或耗电因子。其中,排放因子在本文以NOx排放因子为例。
(11)
(12)

通过对LNG公交车和纯电动公交车进行实测,Zhang和He等[9,15]给出了各个运行模式下的排放速率和耗电功率,如图2所示。LNG公交车测试对象为满足Euro ⅴ排放标准、具备选择性催化还原后处理装置的18 t重的车辆,其排放速率来自车载排放测试结果;纯电动公交车测试对象为开启空调、50%载重负荷的12 m长的新车,其耗电功率来自车载诊断系统测试结果。由图2可见,纯电动公交车存在耗电功率为负的运行模式区间,原因是其配备的再生制动系统在减速运行模式下回收能量,使得纯电动公交车不同运行模式下的耗电功率差异较大。
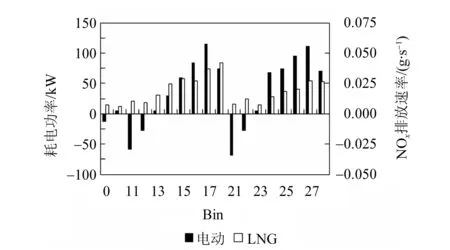
图2 不同运行模式下的NOx排放速率(LNG公交车)和耗电功率(纯电动公交车)Fig.2 NOx emission rates (LNG buses) and electricityconsumptions (electric buses) under different operating modes
2 结果与讨论
2.1 平均速度特征和建模
公交车路段样本平均速度与社会车辆平均速度的匹配结果,如图3所示。其中,社会车辆平均速度和公交车路段平均速度的范围分别为6.12~54.71 km/h、7.99~48.64 km/h。社会车辆与公交车的平均速度呈明显正相关。当社会车辆平均速度小于20 km/h时,公交车平均速度接近甚至超过社会车辆;当社会车辆平均速度大于20 km/h时,公交车平均速度低于社会车辆,且差距随社会车辆平均速度增大逐渐增大。该现象与陈峻等的研究结论高度一致[5]。使用LWLR算法对其进行建模,参数k经交叉验证确定为13,图3中所示曲线即建模结果。
2.2 运行模式分布特征和建模
训练样本的平均速度与运行模式分布的关系,如图4所示(以Bin0~17为例)。其中,怠速模式Bin1的频率随公交车平均速度增加而下降;减速模式Bin11、Bin12则随公交车平均速度增加呈现先增加后下降的趋势;在Bin13~17范围内,随着公交车平均速度增大,VSP逐渐从代表低速、低加速度的Bin13~15转移到代表高速、高加速度的Bin16~17。刹车模式Bin0的频率变化与平均速度的关系不明显。该类现象表明,公交车整体运行状态下其微观的加减速、怠速行为存在明显规律,基于公交车平均速度建立运行模式分布的预测模型是可行的,能达到预测不同能源类型公交车的排放、耗电的目的。

图3 公交车与社会车辆的路段平均速度关系Fig.3 Relationship of average road speeds between buses and social vehicles
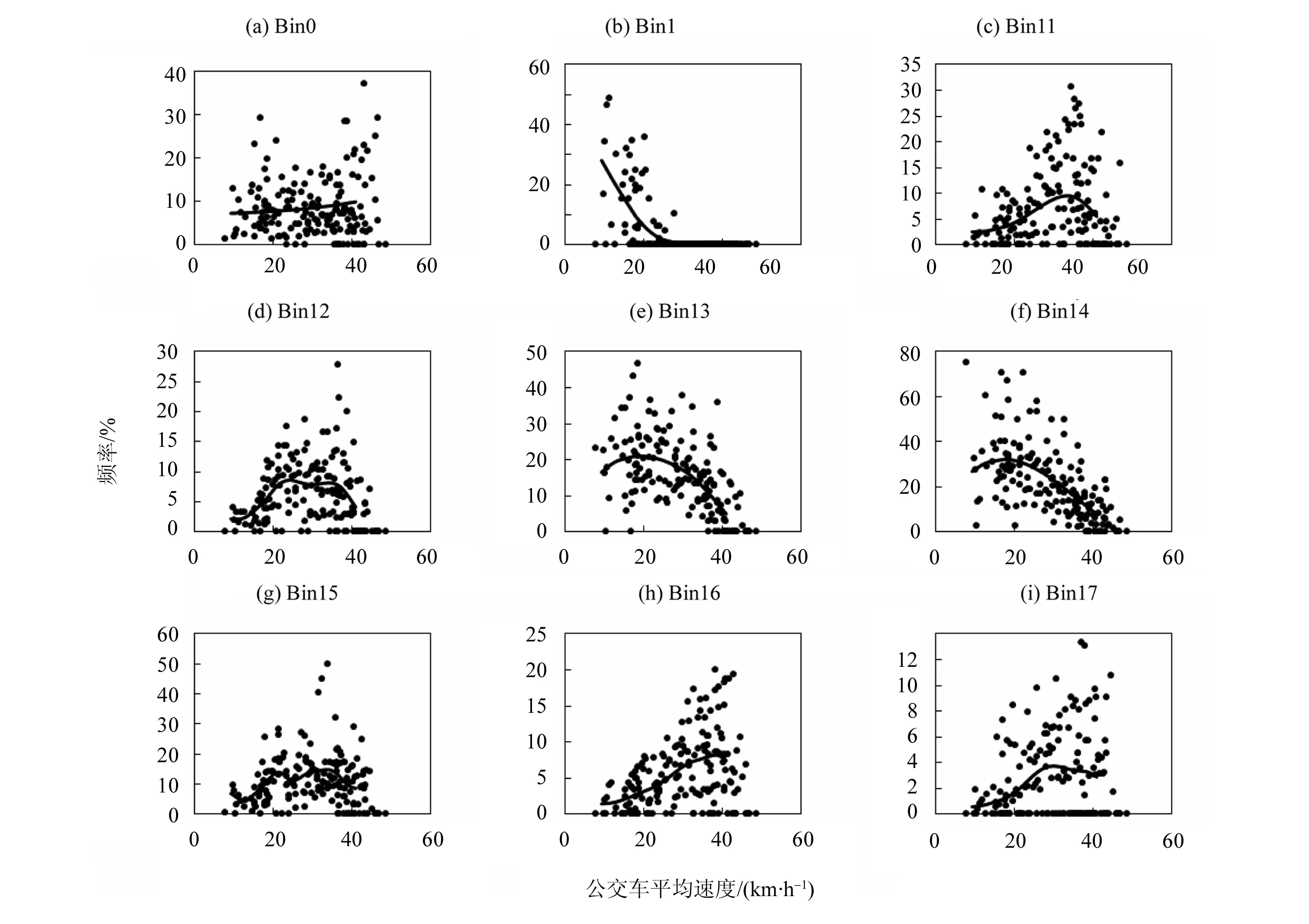
图4 公交车平均速度与运行模式分布的关系(Bin0-17)Fig.4 Relationships between average road speeds of buses and operating mode distributions (Bin0-17)

Bin编号0111121314151617k值3035357233
考虑到各个运行模式的非线性特征互异,应用LWLR建模时分别对每个模式进行不同k值的交叉验证。各个模式下的最优k值,如表3所示。图4中各个模式的曲线即建模结果。
2.3 排放能耗评估及验证
基于2.1和2.2提出的公交车平均速度和运行模式分布预测方法,在输入社会车辆平均速度和公交车各运行模式下的排放速率或耗电功率后,可预测公交车的排放因子或耗电因子。
使用测试集进行模型预测效果的验证,样本具备真实的社会车辆平均速度、公交车平均速度和运行模式分布等数据。He等指出,结合真实的公交车运行数据和不同运行模式下耗电功率计算得到的耗电因子的平均误差低于1%[9],因此可近似认为其为真实值。而,LNG公交车的排放因子计算误差在Zhang等[15]的研究中未明确指出,本文仍将该排放因子作为验证的参照对象。模型的预测效果从公交车平均速度和排放耗电两方面进行评价。
2.3.1 平均速度预测效果 图5为公交车平均速度的模拟结果,真实值和模拟值的范围分别为7.99~48.64、9.32~41.00 km/h。模型较好地捕捉到了公交车平均速度随社会车辆平均速度增加而增加的总体趋势。所有样本的平均相对误差为19.85%。其中,81%左右的样本相对误差绝对值低于30%,2%的样本相对误差绝对值高于60%。排在中间位置的部分样本(编号15~28)显示出了相对误差绝对值高于其他样本的趋势,其对应的社会车辆平均速度范围为28.47~38.11 km/h,表明在该速度区间下公交车与社会车辆的速度关系可能较不稳定。
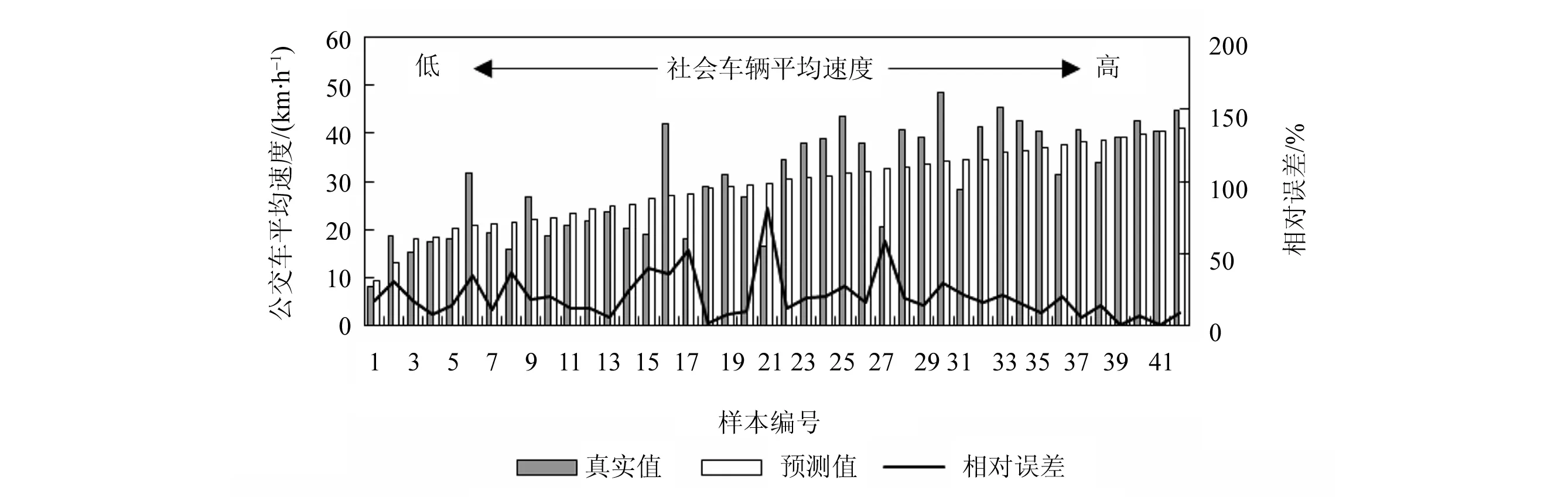
图5 测试样本的公交车平均速度预测结果Fig.5 Estimation results of average road speeds of buses for the test samples
2.3.2 排放/耗电预测效果 LNG公交车的预测结果,如图6所示。NOx排放因子的真实计算值和预测值范围分别为1.20~9.95、1.66~5.61 g/km。预测工况下计算所得NOx排放因子的平均相对误差为20.27%。在趋势上,模型较好地捕捉到了LNG公交车NOx排放因子随社会车辆平均速度增加而逐步下降的特征;且,当社会车辆速度较低时,公交车NOx排放因子下降速度较快。
纯电动公交车的预测结果如图7所示,耗电因子的真实计算值和预测值范围分别为0.34~2.92、0.64~1.26 g/km。预测工况下,计算所得耗电因子的平均相对误差为26.52%,略高于NOx排放因子的预测误差。原因在于公交车的路段运行模式分布具有一定的变异性,而运行模式对耗电功率影响较大,使得其耗电因子的预测值与真实计算值出现一定偏差。在趋势上,预测工况下的计算结果明显捕捉到了纯电动公交车耗电因子随社会车辆平均速度增加先下降后上升的趋势。
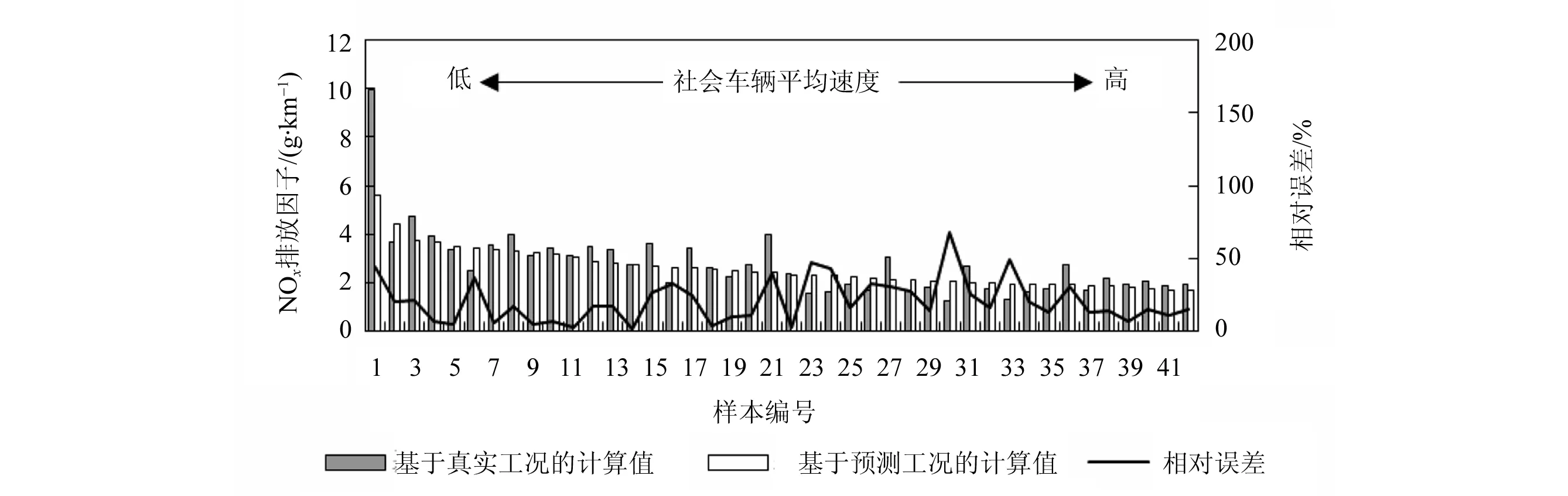
图6 公交车NOx排放因子预测结果Fig.6 Estimation results of NOx emission factors of buses
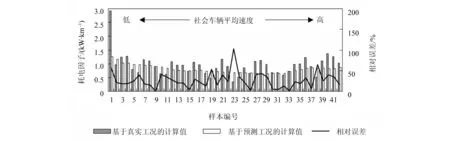
图7 公交车耗电因子预测结果Fig.7 Estimation results of electricity consumptions of buses
因此,本文提出的预测模型不依赖高分辨率的公交车速度数据,具备良好的预测效果,更适合面向大型公交车系统进行实时动态的排放能耗预测。
3 结 论
本研究以广州市中心城区为对象,通过“社会车辆平均速度-公交车平均速度-公交车运行模式分布-公交车排放/耗电”的建模思路,提供了一种不依赖高分辨数据的公交车动态排放能耗预测算例。且:
1)社会车辆平均速度与公交车路段平均速度呈明显正相关,基于前者预测后者的平均误差为19.85%。当社会车辆平均速度小于20 km/h时,公交车平均速度略高于社会车辆;当社会车辆平均速度高于20 km/h时,公交车平均速度低于社会车辆且差值随着社会车辆平均速度的增加逐渐增大。
2)公交车不同运行模式的频率与其平均速度存在明显关系。怠速模式Bin1的频率随公交车平均速度增加而下降;减速模式Bin11、Bin12随公交车平均速度增加呈先增后减趋势;随着公交车平均速度增大,VSP逐渐从代表低速、低加速度的Bin13~15转移到代表高速、高加速度的Bin16~17。
3)基于公交车运行状态的排放能耗评估模型对NOx排放因子和耗电因子的预测误差分别为20.27%和26.52%。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:56
工会博览(2022年5期)2022-06-30 05:30:18
民间故事选刊(2021年11期)2021-11-12 10:27:29
中国交通信息化(2021年2期)2021-07-22 07:34:40
IEEE/CAA Journal of Automatica Sinica(2021年2期)2021-04-22 03:54:26
中学生数理化·八年级物理人教版(2020年9期)2020-11-16 01:17:58
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:04
建材发展导向(2019年11期)2019-08-24 06:34:56
小学生优秀作文(低年级)(2017年9期)2017-08-07 02:14:21
幼儿画刊(2017年5期)2017-06-21 21:17:02