碎冰区航行船舶阻力预报数值模拟研究
2019-12-03 02:07:44齐江辉吴述庆
兵器装备工程学报 2019年11期
齐江辉,郭 翔,陈 强,吴述庆
(武汉第二船舶设计研究所,武汉 430064)
在设计中考虑冰区因素的船舶都可以纳入极地船舶的范畴。极地船舶中,破冰船是专门设计用来破冰、救助和领航等。而其他的冰区加强船舶则以运输、冰区作业等为主要目的,设计中主要考虑其敞水性能同时改善其冰区航行船的抗冰性能。因此冰区加强船通常不需要自主破冰,主要在破冰船开辟的航道中航行,即所谓的碎冰区航行。船舶在碎冰区航行时,碎冰与船体会发生碰撞和摩擦,较敞水区域航行船舶阻力明显增加,船-碎冰相互作用的机理较为复杂。碎冰的运动对船后流场有很大影响,当碎冰运动到螺旋桨附近流场时会与螺旋桨发生干扰,会较大影响螺旋桨的性能。同时碎冰与船体频繁的作用会影响船体的疲劳,因此,研究碎冰区航行船舶与冰之间相互作用的特点及影响因素,对极地船舶的安全性与可靠性设计有重要意义。
在船-冰相互作用研究领域内,主要以破冰船破冰过程研究为主,相关研究已经有了很大进展[1-4]。而涉及碎冰区航行船舶的研究则相对较少。通常使用的是理论分析方法或简化的数值模拟方法,而试验方法由于试验水池等条件限制并未广泛开展。
在数值模拟方面,国内外开展的相关研究并不多。2010年,JungyongWang等[5]模拟了碎冰条件下“TerrryFox”号破冰船的阻力性能,采用了LS-DYNA软件模拟了不同碎冰密集度下的船-冰相互作用。2013年Moon-Chan Kim等[6]应用LS-DYNA软件模拟了一艘冰区散货船在碎冰区航行的阻力性能,其模拟结果与试验进行了比对,证明了LS-DYNA软件的可行性。郭春雨[7]等同样采用LS-DYNA软件计算了不同航速和碎冰密集度下船舶航行阻力特性,并将数值模拟结果与试验值进行了对比,验证了计算的准确性。在自编程计算方面,李紫麟[8]基于离散元理论建立了浮冰-船体相互作用的数值模型,采用三维圆盘来模拟海冰单元,通过对海冰与船体之间接触力的计算,实现了船舶阻力的模拟。王超[9]等基于离散元模型结合欧拉多相流对碎冰区船舶的冰阻力进行了数值模拟,得到了碎冰阻力随航速等的变化规律。
在船模试验方面,随着冰水池技术的发展,国内外冰池船模试验技术迅速发展,并取得了较多研究成果。郭春雨等[10-11]依托哈尔滨工程大学船模拖曳水池,开展了一系列碎冰区航行船舶阻力性能试验研究,总结了许多有益的结论。黄焱等[12]依托天津大学冰力学实验室,采用对平整冰进行预切割得到碎冰的方法,完成了一艘极地运输船舶的阻力试验,其试验方法对碎冰区船模试验有一定的指导意义。
我国在冰区船舶性能研究方面处于起步阶段,对于碎冰与船舶相互作用的机理还未完全掌握。相对于试验方法,数值模拟方法适用范围更广,可以对碎冰-船体相互作用的全过程进行准确的模拟,便于观察物理现象。因此,本文基于离散元方法,结合拉格朗日多相相互作用模型,对船-冰相互作用过程进行模拟,系统的分析碎冰的运动状态及对船舶阻力性能的影响,模拟了不同航速下碎冰区航行船舶的阻力特性,得到航行阻力与航速之间的关系,进一步的分析了碎冰的运动状态以及船体周围的流场特征。
1 基础理论
本文使用STARCCM+通用流体分析软件,结合离散元方法及拉格朗日多相相互作用模型,模拟一艘典型货船在碎冰航道内的航行过程,分析碎冰-船体相互作用力的变化及碎冰对船体周围流场的影响。
两单元之间接触作用模型如图1所示,在离散元中接触力公式实际是弹簧-阻尼器模型的一种变形。弹簧产生将两单元分开的排斥力,阻尼器表示的是粘性阻尼的影响。作用在接触点处的接触力可以看作是一对弹簧-阻尼器振子。
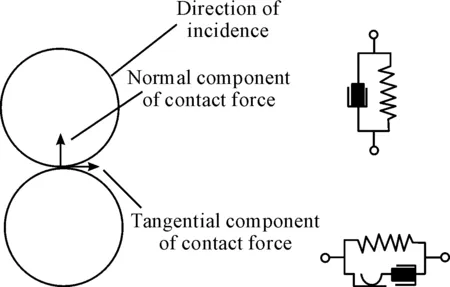
图1 单元接触力模型示意图
本文中采用的颗粒接触力模型为STARCCM+提供的Hertz-Mindlin无滑移接触模型,该模型为一种非线性弹簧-阻尼器接触模型的变形。作用在两个单元A和B之间的力可以表示为:
Fcontact=Fn+Ft
(1)
式(1)中:Fn为法向力分量;Ft为切向力分量。
法向力分量可以写成:
(2)
切向力分量可以写成:
(3)

(4)
对于单元-壁面碰撞,上述公式保持不变,将壁面半径和质量设定为Rwall=∞和Mwall=∞,因此等效半径为Req=Rparticle,等效质量Mwall=Mparticle。
船体周围流动假定为不可压缩流动,流动满足连续性方程,考虑流体的粘性,湍流模型选取RANSk-ε模型,可以更好地模拟远场充分发展的流动。自由液面采用VOF方法处理,在近自由面附近网格加密,可以更好地捕捉自由液面位置及形状。
2 数值模型
2.1 离散元模型
本文选取颗粒离散元模型对浮冰进行模拟,参照如图2所示的真实船舶碎冰区航行状态。由于实际碎冰形状非常复杂,想要完整的模拟真实碎冰不太现实,因此数值模拟或实验中一般选取长方形块模拟碎冰。根据实际观察船舶在碎冰区中航行的状态及碎冰形状,选取两种几何形状来近似模拟碎冰块:金字塔形和不规则棱柱体,如图3所示。数值模拟的碎冰形状会比长方形碎冰更加复杂,与真实碎冰的情况也更为接近。

图2 船舶碎冰区航行场景
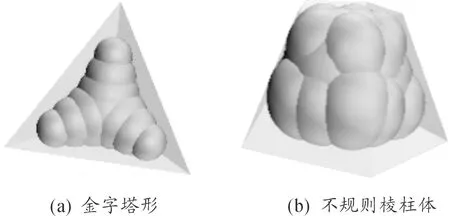
图3 碎冰几何形状
根据北极地区碎冰尺寸统计数据,碎冰尺寸大致服从对数正态分布规律,其分布形式为[7]:
(5)

本文数值模拟中,颗粒(两种碎冰模型)、流体(水)和壁面(船体壁面、航道边界壁面)多相之间会产生碰撞等相互作用,在计算中考虑7种相互作用类型,如图4所示。其中作用1、2、5均为颗粒间碰撞,采用上述Hertz-Mindlin无滑移接触模型,静摩擦系数为0.05,法向复原系数为0.2,切向复原系数为0.2;作用3、6均为颗粒与壁面碰撞,采用上述Hertz-Mindlin无滑移接触模型,静摩擦系数为0.05,法向复原系数为0.5,切向复原系数为0.5;作用4、7均为颗粒与VOF相作用,其作用模型及参数设置与同船体与VOF相相互作用模型相同。

图4 多相相互作用示意图
2.2 计算模型
本文船体模型为一艘典型散货船,如图5所示,船体主尺度参数如表1所示。

图5 船体及网格示意图
表1 船体主尺度参数

船体参数值船长L/m125型宽B/m22.6吃水T/m6.0湿表面积S/m22 820排水量/t9 537.6
本文计算域分为空气域和水域,计算过程中船体保持不动,通过改变速度入口处的速度调节船舶的航速,碎冰航道宽度为86 m,计算域如图6所示。本文目的为探索碎冰在船体周围的运动特性,采用实尺度模拟船舶在碎冰区航行。
3 数值计算结果及分析
船舶在碎冰区航行受到的阻力包括水阻力和碎冰阻力,其中碎冰阻力又可以分为清冰阻力和摩擦阻力。船舶航行时与碎冰块发生碰撞,使其产生远离船舶的运动而产生的力为清冰阻力;碎冰块贴着船体表面运动而产生的力为摩擦阻力。

图6 计算域示意图
本文计算船舶航速分别为4 kn、6 kn、8 kn、10 kn和12 kn时,船舶所受到的冰阻力及冰块运动情况,分析船舶在碎冰区航行时的阻力特性及速度对冰区航行阻力的影响。
3.1 收敛性验证
为了对本文数值计算结果进行不确定度分析,本文进行网格收敛性验证。本文中选用满足一定细化率要求的三套网格用于网格收敛性分析,三组网格分别为Mesha、Meshb和Meshc,网格划分尺寸参数如表2所示,其中L为船长。
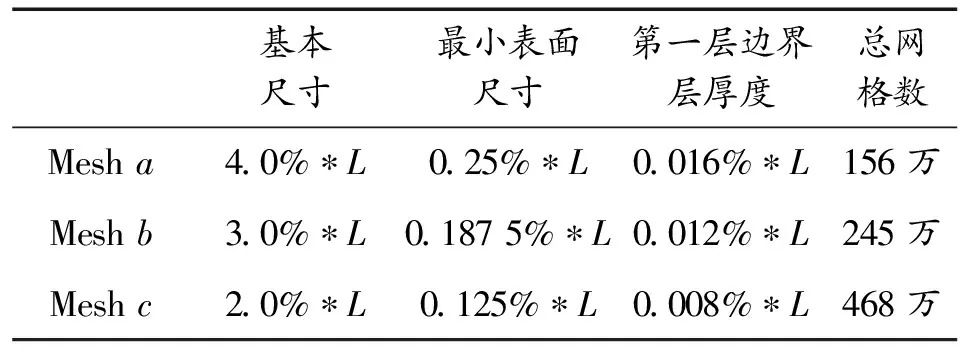
表2 网格划分参数
3种尺度网格阻力计算结果如表3所示,其中总阻力最大值与最小值之间的误差为2.7%,碎冰阻力最大值与最小值之间的误差为2.7%,水阻力最大值与最小值之间的误差为3.3%。从上述计算结果中网格的收敛性可以得到验证,也从一定程度上验证了本文数值计算方法的准确性。本文后续计算中均采用Meshc网格参数进行网格划分。
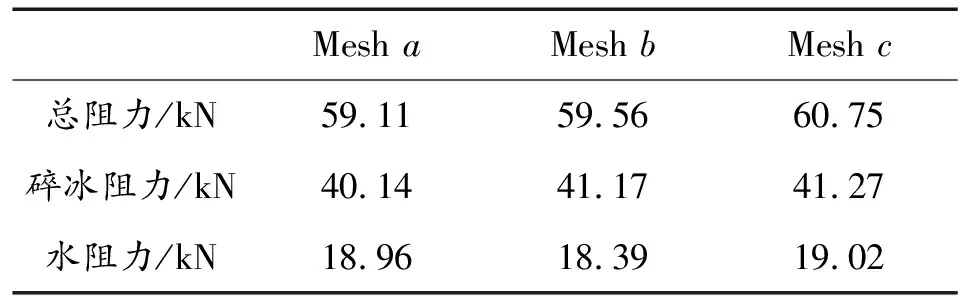
表3 不同网格尺度阻力计算结果
3.2 航行阻力分析
对假定航速下的船舶分别进行敞水阻力计算及碎冰区航行阻力计算,分别得到敞水阻力及碎冰区航行阻力如图7所示。
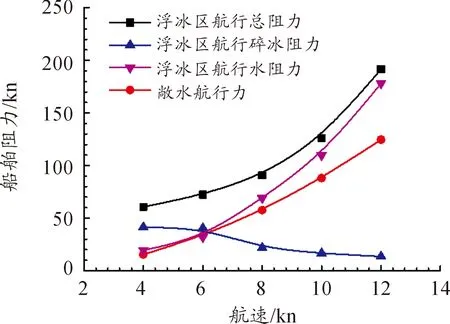
图7 船舶各阻力
由图7中可以看出,船舶在碎冰区航行的总阻力随着航速的增加而增大,这与敞水航行的阻力规律相似。碎冰区船舶航行总阻力等于碎冰区航行水阻力与碎冰区航行碎冰阻力之和。通过STARCCM+计算过程中对离散相与壁面接触力的监测得到接触力的合力在x方向的分量即为碎冰阻力。需要指出的是,数值模拟过程中船—冰作用力非定常瞬时曲线,伴随着强烈的随机和震荡特性。从图7中可以看出碎冰区航行碎冰阻力随着航速的增加减小。参考船舶穿过碎冰区现象初步分析,碎冰在与船体碰撞后产生远离船体的运动,随着航速的增大这种现象加剧使得船体周围的碎冰变少,因此导致船体与碎冰的接触力减小。后文中会针对这一问题做进一步判断和论述。
同时,图7中也可以看出在各个航速下敞水航行阻力均小于碎冰区航行水阻力,且随着航速的增大两者之间的差值也变大。以航速10 kn为例,图8为两种航行工况下船体水线处的压力分布曲线。碎冰的存在改变了船体表面的压力分布,进而使得船舶在两种不同海域中航行的水阻力产生明显差别。

图8 水线处船体表面压力对比
3.3 碎冰运动状态分析
船舶受到的碎冰阻力是船体—碎冰相互作用产生的,碎冰与船体作用后在船体周围运动,其运动状态对船舶碎冰阻力有着关键作用。以航速10 kn时的工况为例,分析船体周围及不同时刻碎冰的运动状态。
由图9可知,船舶与碎冰开始作用后,碎冰沿船体两侧运动,从图9中可以明显看到船体两侧兴起的肩波系,碎冰也随着兴波有远离船体的趋势。由此不难推断,当航速较高时,船体的兴波较为明显,在兴波的影响下碎冰产生远离船体周围的运动,因此与船体产生接触的碎冰数量会减少,这是碎冰阻力随着航速的增加而增加的趋势变缓的一个重要原因。
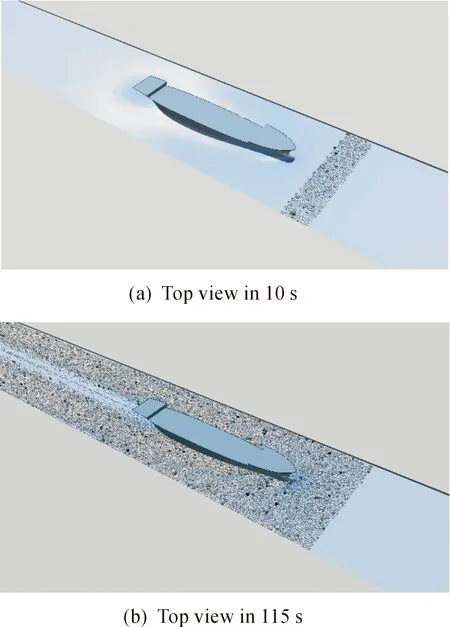
图9 不同时刻碎冰运动状态
由图10可以看出,船舶在碎冰区航行时,在船体后方会形成一条浮冰数量明显减少的航道,这会大大减少碎冰在船后的堆积,对螺旋桨的运行工况较为有利。随着航速的增加,这种现象会更加明显,当航速较大时,该航道宽度甚至会超过船体的宽度。

图10 不同航速碎冰运动状态对比
图11比较明显地展现了不同航速时船体艉部的碎冰堆积情况,当航速较低时碎冰运动到船体艉部附近时会速度会大大减小同时在船体艉部附近堆积,碎冰的堆积会导致船体受到的冰阻力增加,同时碎冰在船体艉部堆积会影响螺旋桨的运动工况,使得螺旋桨前方的进流更加不均匀,不利于螺旋桨性能。而当航速增大时,会较大程度的改善碎冰在船后堆积的情况,图11中也可以看出,航速达到10 kn时,碎冰在船艉堆积很少,这也为碎冰区航行功率配置和螺旋桨选型提供了一定依据。
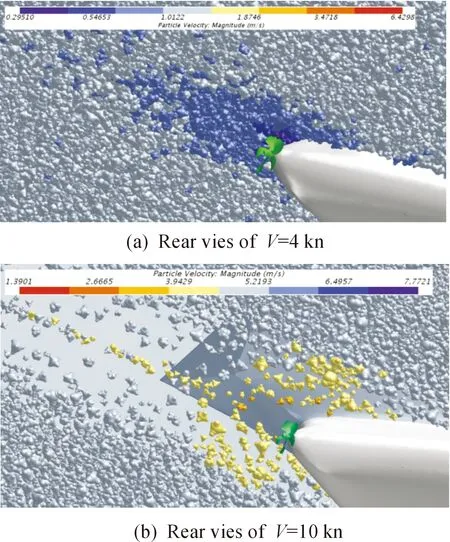
图11 不同航速船体艉部碎冰堆积
3.4 船体-冰相互作用力分析
为进一步说明船体—冰的相互作用规律,图12展示了不同航速时船体与冰相互作用接触力的分布,可以看出,在航速较低时船体与冰的接触面积较大,随着航速的增大,船体与冰的接触面积变小。图12中也可以看出,随着航速的增大,船体与冰的接触面积减小了,但其接触力峰值会比低速时高许多。
在图13所示的船体表面接触力时历曲线中,可以看出上文叙述的船体—冰相互作用力曲线的瞬时性和震荡特性。航速对船体受到的接触力影响较大,在航速较小时碎冰阻力以摩擦阻力为主,在航速较高时碎冰阻力则以清冰阻力为主。随着航速的增加,船舶与碎冰的碰撞力加大,其接触力的震荡幅值增大,本文中碎冰阻力为接触力峰值点的平均值,因此其碎冰阻力也会增大。接触力时历曲线均在某一基准值上震荡,可以认为该基准值即为碎冰阻力中的摩擦阻力,其由碎冰与船体接触的数量决定。可以看出,随着航速的增加,其接触力的基准值却呈现下降的趋势,结合图12中的接触力分布规律,航速增大使得与船体接触的碎冰数量明显减少,因此使得其摩擦阻力大大减小,这也在一定程度上解释了碎冰阻力随着航速的增加而减小的原因。

图12 不同航速船体表面接触力分布
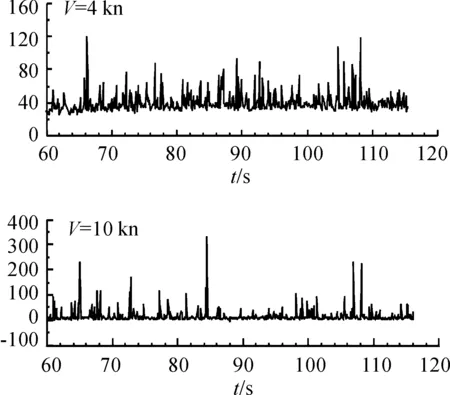
图13 船体—冰接触力时历曲线
4 结论
1)使用STARCCM+软件对碎冰区航行船舶的航行过程进行模拟,模拟过程中可以较为完整地呈现碎冰的运动状态,对船—冰相互作用的规律有更为清楚的认识。
2)本文中模拟了碎冰区航行船舶不同航速时的阻力特性,计算结果显示航行阻力随着航速的增加而增大,这与碎冰阻力试验中得到的结论类似,碎冰阻力却随着航速的增加而减小。随着航速的增加,船体与冰的瞬时接触力峰值即清冰阻力增大,但在船体的兴波、撞击等作用下碎冰远离船体表面的运动加剧,这导致了船体与冰块接触面积减小,即摩擦阻力减小。
3)在艏部,由于碎冰与船体的撞击形成了一个减速区,造成了碎冰在这一区域的堆积,航行阻力增大;而在艉部,由于尾涡等的影响,同样使得碎冰在艉部水线附近堆积,这可能使螺旋桨的进流更加不均匀,使螺旋桨的运行工况变差,这对冰区航行船舶的船型设计提供了改进的方向。同时计算结果显示,在航速增加时,艉部的碎冰堆积状况会大大改善,同时在船舶的后方形成碎冰较少的航道,在航速较高时航道的宽度甚至会超过船宽。
本文计算中未考虑到螺旋桨的作用,下一步还需要研究更多因素(碎冰密集度、碎冰模型形状、波浪等)对碎冰阻力特性的影响。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:37:24
舰船科学技术(2022年20期)2022-11-28 08:19:52
舰船科学技术(2022年20期)2022-11-28 08:18:40
水上消防(2022年1期)2022-06-16 08:06:56
船舶力学(2022年1期)2022-02-10 09:07:06
造船技术(2021年6期)2022-01-05 14:14:04
党员生活·中(2021年8期)2021-08-30 17:39:25
舰船科学技术(2018年7期)2018-07-25 06:30:18
舰船科学技术(2016年1期)2016-02-27 15:39:23
焊接(2015年9期)2015-07-18 11:03:51