
阈值选择方法在高光谱图像目标检测中的应用
2019-12-03 02:14关世豪
兵器装备工程学报 2019年11期
李 豪,杨 桄,关世豪
(空军航空大学,长春 130022)
高光谱技术是遥感领域近年来发展较为迅速的技术之一,高光谱图像在传统图像的“空间维”的基础上附加了光谱信息,使其每一像元都对应一条光谱曲线[1],可以对其进行更为精细的定量研究。通过对光谱特性的使用,可以从光谱维的角度对高光谱图像进行相应的分析与处理。利用光谱曲线进行目标检测是高光谱图像的独有优势,通过光谱曲线的匹配,可以对一些可见光波段无法检测出的目标进行识别。高光谱目标检测的算法有很多,其效果各不相同,但在其中阈值选取的问题上多依据经验,少有利用严密的数学公式进行相应计算,因此结果虽能体现出识别的效果,但无法做到合理精准地检测到正确目标的位置与形状大小。本文通过研究高光谱图像目标检测算法中的阈值选取问题,将传统图像分割中的阈值选取方法应用在高光谱目标检测的算法上,并通过实验验证结果的精度与可行性,期望能更进一步地提高高光谱目标检测的精度与科学性。
1 研究方法与基础理论
高光谱目标检测的基本原理是利用已知物体的光谱曲线与未知的光谱曲线进行对比,根据其相似性来判断未知物体的光谱曲线的类别,常见的方法根据其原理可以分为基于距离的光谱匹配方法[2],包括马氏距离、欧式距离、巴氏距离等;基于光谱形状的光谱匹配方法,如光谱角匹配[3]等;基于最大相似系数的光谱匹配方法,如交叉相关光谱匹配法[4]等;基于编码的光谱匹配算法,如二值编码法等;基于滤波的方法,如匹配滤波法[5]等;此外还有支持向量机[6]、神经网络法等机器学习方法。
传统意义上图像分割中的阈值,指的是一个或多个指标,用这个指标对图像的灰度直方图进行区间的划分,将图像中灰度值在同一个区间的像素分割为同一种物体[7]。不同的图像分割算法中,阈值的表现形式各不相同,但都可以总结为,通过各个算法的计算,将得到的数值与设定的阈值进行比较,以划分这些数值所对应的元素所属的类型[8]。
但这些方法多是对灰度值图像进行分割[9],高光谱图像由于其特殊性,无法直接采用以上方法进行图像分割进而实现目标检测。因此,高光谱图像目标检测中,需要首先对高光谱图像进行降维,将其转化为灰度值图像。传统的高光谱图像的降维方法有主成分分析法、最小/最大自相关因子分析法、最大噪声分离等,但这些方法都是尽可能多地将信息集中在前几个波段以实现数据的简化,而不是专门针对目标检测进行的算法,利用阈值对降维后的图像进行分割无法直接得到结果。因此,需要根据高光谱目标检测的原理进行图像的灰度化,再利用阈值进行图像分割。
本文的思路是根据目标检测的原理进行高光谱图像的灰度化,将已知的目标的光谱曲线特性与图像进行比对。将比对的结果以图像方式进行显示,对此图像进行阈值分割,以得到阈值选取后的高光谱图像目标检测结果。该过程中的阈值的选择问题,在高光谱目标检测算法中一直是一个被忽略的研究,多数研究者在实际操作中利用经验,设置一个适中的阈值,通过不断调整,以使结果接近真实值,通过结果判断算法的合理性。这种人工选取的方法效率低下,得到较为理想的结果需要大量的重复性试验,耗时耗力;对于不同的图像的最优阈值也不相同,阈值不具有迁移性,无法参考使用;且不同的目标检测算法的阈值意义不同,这也不利于验证算法的统一性,比较算法的优劣性。
在图像分割领域,阈值选择的研究却是一直不断发展的,方法也是多种多样。按照吴一全[10]在2014年的分法,根据图像分割阈值选取的分类方式不同,图像分割阈值选取方法如表1所示。

表1 图像分割阈值选取方法分类
从应用的角度来看,高光谱的目标检测也可以看作是对于灰度值图像目标分割的一种多维应用。因此,通过传统的图像分割阈值选取方法可以对高光谱目标检测提供一些方法与思路。
阈值的选取对高光谱图像的目标检测结果非常重要,但如何评价其检测结果目前国际上尚无明确的标准,尤其是专门用来评价高光谱目标检测阈值选取合理与否的相关参数指标很少。传统的高光谱图像目标检测的评价方法有误差矩阵、总体分类精度、Kappa系数[11]等,但这些方法多是用来评价算法的分类精度,而不是用来评价算法中所使用的阈值的精确与否;而图像分割阈值选取的评价方法多为主观,少数的定量评价方法的适用性较窄。本文使用了不需要进行阈值选取的高光谱目标检测算法混合调谐匹配滤波法Mixture Tuned Matched Filtering (MTMF),利用目视散点图的方式进行目标的识别,将使用阈值选取方法的结果与其比较,以判断结果的优劣性;还采用同种高光谱目标识别的算法,利用不同的阈值选取方法得到的阈值对结果进行比较,以评价相应方法的迁移性与优劣性。
2 阈值选择在高光谱目标检测中的应用
鉴于高光谱图像目标检测阈值选择算法的空白性,图像分割阈值选取的相关算法应用在高光谱目标检测中需要进行相应的调整,本文对其处理流程如图1所示。
第1步:将高光谱图像按照其目标检测的方法处理为灰度值图像。灰度值图像的形成过程为,对于图像中的每一个像元,依次计算它与目标光谱之间的光谱特性,将该光谱特性利用像元值表示出来。该图像表示了光谱特性在影像上的分布情况,像元越暗,说明与最终成分的光谱特性越相似。
第2步:根据图像分割阈值选取的方法,对生成的灰度值图像进行阈值的选取。
第3步:利用此阈值对灰度值图像进行分割,所得的二值图即为识别出的目标。
第4步:首先利用混合调制匹配滤波Mixture Tuned Matched Filtering (MTMF)方法,通过目视识别云图的方式得到目标识别图像,作为传统经验法得到的识别图像,再比较本文方法与其差别,同时还比较不同阈值选取方法所识别出的目标,并进行相应的精度评价。

图1 实验流程框图
图2中虚线所圈部分为采用本文的方法所获得的,即在传统的高光谱目标识别的流程中添加了一步进行阈值选取的步骤。

图2 实验数据图像
选择的图像是一幅伪装装甲车的高光谱图像,该图像大小为241×896个像素值,包含384个波段,波谱范围从382~2 500 nm,该图像已经过大气校正。其中,已知图中有两辆装甲车,一辆在公路上,一辆在密林中,但从可见光图像上只能看到公路上的装甲车,图像情况如图2所示,图2中红色圆圈标记即为公路上的装甲车,提取公路上的无伪装装甲车提供目标光谱曲线,对整幅图像进行目标检测。公路上的无伪装装甲车所对应的像素群的最大值、最小值、平均光谱曲线如图3所示。
高光谱图像的目标识别算法我们选用较为常见的几种算法:约束能量最小化算法(Constrained Energy Minimization,CEM)、自适应一致估计算法(Adaptive Coherence Estimator,ACE)、光谱角匹配算法(Spectral Angel Mapper,SAM)。
图3 已知目标的平均光谱曲线
本文使用的阈值选择方法有:直方图极点法、迭代阈值选取法、最大类间方差阈值法(Ostu法)。
直方图极点法,是将灰度图像的直方图先进行平滑处理,再进行曲线拟合,在曲线中选择一阶导数为0且二阶导数大于0的点,即极小值,选用极小值为分割的阈值,当直方图中存在多个极小值时,可以计算极大值,即一阶导数为0且二阶导数小于0的点,综合考虑极值之间的位置关系,选择两波峰之间的波谷的极小值作为阈值。
迭代阈值选取法则是不断地选取图像中的灰度中值作为初值,通过不断地迭代计算出阈值。其公式如下:
(1)
式中:l表示灰度级的个数;hk表示灰度级为k的个数,迭代终止的条件是阈值收敛到一个稳定值。
最大类间方差阈值法,又称为大津法,是日本学者大津(Ostu)于1979年提出的。该算法通过灰度级将图像分为目标与背景两部分,两者之间的类间方差越大,说明分类结果越好。当0~i灰度级为图像的目标像素级时,i~255即为图像的背景像素级。
g=w0w1(u0-u1)2
(2)

以上所说3种方法是3种不同原理的阈值提取方法,本文不使用那些以分类结果反推阈值的方法,是因为我们是以合适的阈值求取最好的目标检测效果,而非以最好的目标检测效果求取合适的阈值。
由于目标曲线只有1条,分类结果也只有1种,结果为一维,因此我们无法使用高光谱图像分类中较为常见的混合矩阵,也无法使用由此延伸的总体分类系数与Kappa系数,但根据其原理,定义了此例中的分类正确率与误分率。分别表示如下:
(3)
(4)
式(3)为正确率r的定义,u代表识别出的正确像素点个数,a代表实际上的目标像素点个数;式(5)为误分率w的定义,v代表误识别出的像素点个数,f代表图像中非目标中的像素点个数。
3 实验结果分析
目标识别混合调制匹配滤波Mixture Tuned Matched Filtering (MTMF)方法的点云图选择如图4所示,识别结果如图5。
图4 MTMF点云图选择

图5 MTMF识别结果
本文3种算法所得到的高光谱图像灰度值图像表示如图6所示,从上向下依次是CEM、ACE、SAM:
图6 不同算法的高光谱灰度值图像结果
接下来应用不同的阈值选取方法对所得到的高光谱图像灰度值图像进行阈值计算。得到阈值参数如表2所示。
表2 3种阈值选取方法得到的阈值
利用以上参数,对以上不同算法所得到的灰度值图像进行目标检测,目标检测结果如图7所示。从图7(a)到图7(c)的算法依次为CEM、ACE、SAM算法结果,每一个图中从上至下依次是直方图法、迭代阈值选取法和最大类间方差阈值法的结果:
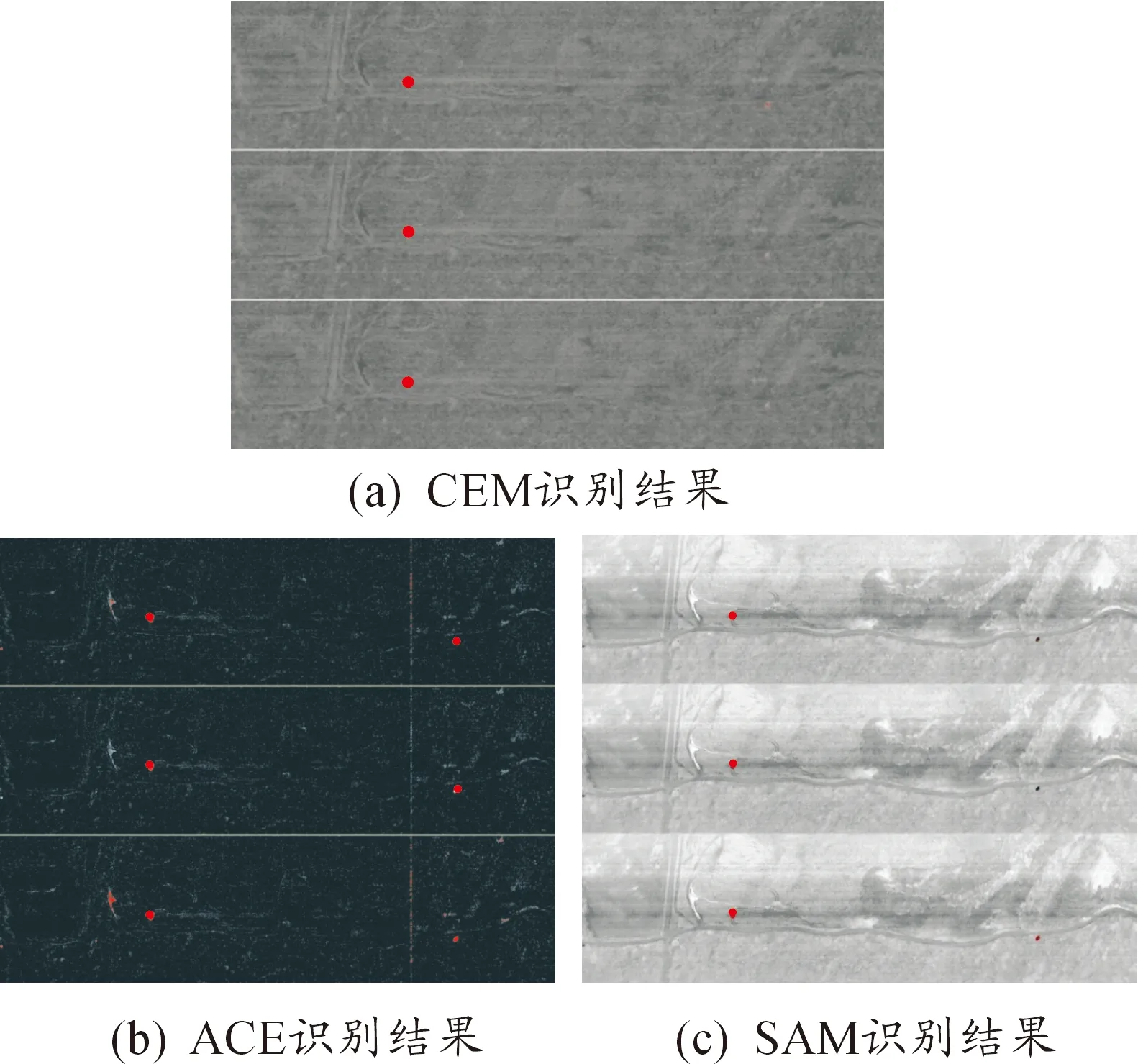
图7 目标检测结果
各算法识别出的目标像素个数及正误数如表3所示,本文前文中定义的正确率和误分率得到的结果如表4和表5所示。

表3 实验结果像素值统计

表4 正确率 %
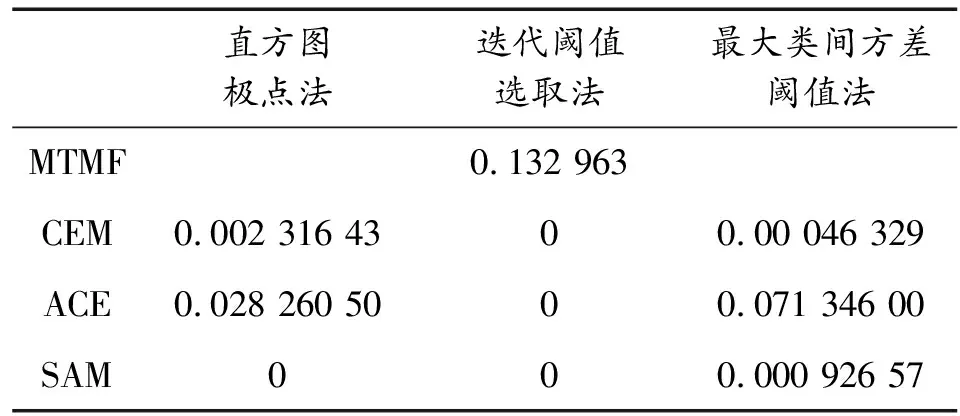
表5 误分率 %
与传统依据经验进行相关阈值设定的方法相比,本文的正确率与其相差无几,但误分率很低,且都能很好的识别出结果,说明对阈值提取能够进一步精确高光谱目标检测。
本文的3种方法比较,从位置的角度来看,最大类间方差阈值法在ACE算法阈值选择中误识别出了许多图像中部的目标,其他的算法都较为准确地定位到了目标的位置;从识别率的角度看,直方图极点法和最大类间方差阈值法利用在ACE算法中可以识别出大量的目标像素,识别程度较高,而迭代阈值选取法则识别度较低,可能与其算法容易陷入局部最优解有关,但同时,直方图极点法和最大类间方差阈值法也存在着不同程度的误分率,从图像直观的角度看,当使用ACE算法时,都识别出了相当于甚至是高于目标像素值的错误像素值。总体而言尽管这些结果有差异,但利用这些方法提取出的阈值都能进行较为准确地识别出目标。
在实际使用中,可以使用迭代阈值选取法对目标进行定位,利用其他两种方法进一步地准确选择目标的像素值。
在实际高光谱目标检测中,可以在原有算法的基础上增加一步对于阈值的选取,以使结果更加精确。
4 结论
阈值的选取一直是高光谱目标检测中被忽视的一个问题,本文将高光谱图像进行了二值化,并通过几种常用的不同原理的阈值选取方法,定量地求出高光谱目标检测中的阈值设定,结果显示此种方法能够有效地提取目标的位置和像元信息,解决了通常目标检测中阈值不准确,识别精度不高的问题,为进一步做好高光谱目标检测提供了解决思路,同时也拓展了传统阈值选取方法的应用范围。进一步可以研究的内容主要有以下几个方面:
1)采用更多的阈值选取方法进行试验。本文只是利用了3种比较常见的阈值选取方法进行目标检测,而阈值选取方法有很多种,其识别结果也会有很多差异,我们需要结合这些算法的原理与高光谱图像的特点,使用更适合高光谱图像的阈值选取方法。
2)研究如何将现有方法与高光谱图像做好接口。高光谱图像不同于传统的灰度值图像,因此在分割时需要考虑到高光谱图像的特点,本文采用光谱匹配等相关算法将高光谱图像与已知光谱曲线进行对比,得到灰度值图像,而进一步,可以使用更多的处理手段,以使阈值选取的方法更加合适地应用在光谱曲线上。
3)提高评价精度。本文由于已知了目标的位置形状与大小,可以将识别结果与之直接进行比较评价,但实际目标检测中不会有先验知识,评价的参考也就需要进行改变。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年6期)2022-07-02
黑龙江大学自然科学学报(2022年1期)2022-03-29
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
智能计算机与应用(2020年4期)2020-08-31
中国信息技术教育(2020年2期)2020-02-02
