尾部推进海洋核动力平台的机动性能影响研究
2019-12-03 02:13:40章红雨齐江辉郑亚雄
兵器装备工程学报 2019年11期
章红雨,齐江辉,郑亚雄
(武汉第二船舶设计研究所,武汉 430064)
海洋核动力平台(以下简称“平台”)是船舶工程与核能工程的结合,可为作业海域周围的海洋平台和岛礁等用户提供淡水和电力。平台属于长期系泊自航式船舶,尾部配置有两套全回转推进器。在平台运行期间,尾部推进能够在软刚臂的安装与解脱、平台自航、定点排污和避碰等方面发挥重要作用。
众多学者对在尾部推进作用下的船舶动力响应进行了研究,严新平等[1]从水环境-船体-推进系统动力学耦合作用、船模试验性能和实船航行性能等方面,综合分析了大型船舶推进系统与船体耦合的动力学问题。欧礼坚等[2]采用CFD对粘性流场中导管螺旋桨在不同进速系数下的推力系数、转矩系数、表面压力等水动力性能进行了数值仿真,并与模型试验结果进行比较。魏春阳等[3]为界定喷水推进器的流场控制体,联合采用四面体非结构化网格和六面体结构化网格对所有区域进行离散,选择剪切应力输运湍流模型,并采用稳态多参考系方法求解系统流场。
虽然尾部推进在平台作业中需要发挥多种作用,但总体而言包含两方面,即提供平台纵向的推力和横向的旋转力。因此需要对在尾部推进作用下的平台动力响应进行数值分析,并以运动和系泊力为目标,论证尾部推进在每一平台作业中的作用。
1 理论概述
平台由软刚臂单点系泊系统长期定位于渤海海域,综合考虑海洋环境条件对船体的激励载荷,以及由软刚臂配重提供的系泊回复力,其时域运动方程为[4]:
Fw(t)+Fwd(t)+Fc(t)+Fm(t)
(1)
参考API规范,本文选用模块法对平台风载荷进行计算,即将水面以上部分分解为多个标准构件,最后将各构件的风载荷叠加得到总的载荷[6]。构件i承受的风载荷计算公式为:
(2)
则总的风载荷为:
(3)
总的风载荷矩为:

(4)

同样参考API规范,选用模块法计算流载荷,水下部分受到的流载荷计算公式为:
(5)
式中:Vc为设计流速;Css为流力系数,515.62 N·s2/m4;Cd为拖曳力系数;Ac(α)表示流向为时,平台的迎流面积。
流载荷矩为:
Mc=Fcyx+Fcxy
(6)
式中:Fcx为平台受到的纵向流载荷;Fcy为平台受到的横向流载荷;x为平台的横向流载荷距离参考点的力臂;y为平台的纵向流载荷距离参考点的力臂。
2 计算模型和参数
2.1 坐标系与方向规定
总体坐标系原点位于平台尾部基点,x轴为船长方向,y轴为船体左舷,z轴垂直向上。规定风浪流传播方向与总体坐标系x轴逆时针夹角为正[7],如图1所示。
图1 风浪流方向规定
2.2 平台模型
采用水动力学软件AQWA对平台进行频域和时域运动响应分析,船体网格划分如图2所示,共计 23 339个节点,7 658个单元;软刚臂单点系泊系统模型如图3所示,采用tube单元,系泊腿两端节点与系泊支架、软刚臂之间仅能自由转动,软刚臂末端与塔架相连且可以自由转动[8]。
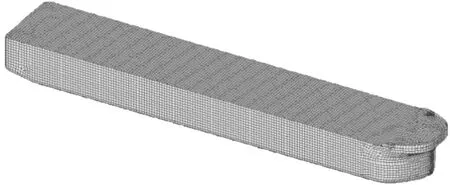
图2 船体网格模型
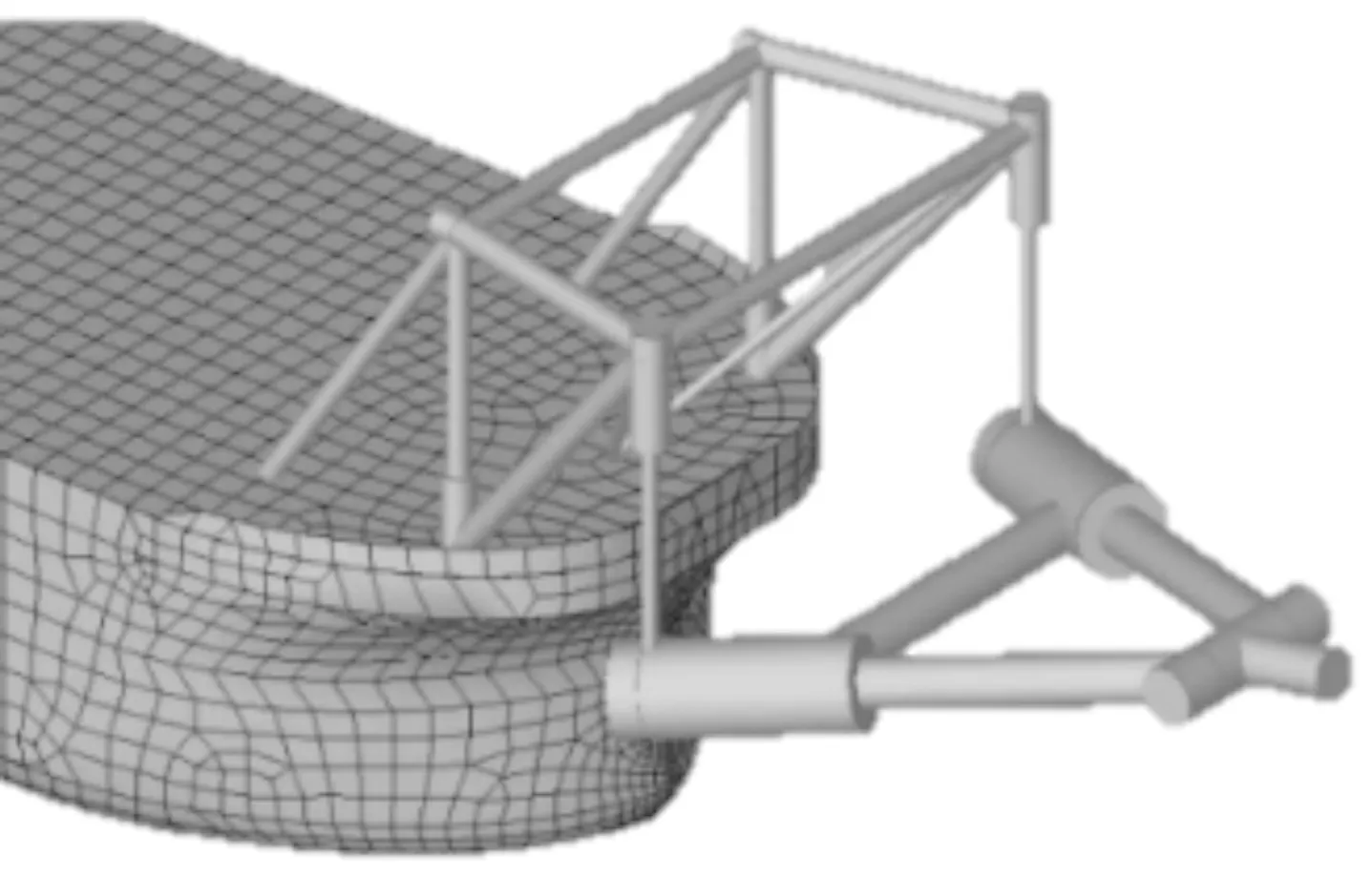
图3 软刚臂单点系泊系统模型
2.3 尾部推力参数
基于平台设计方案,初步确定于平台尾部安装2台全回转推进器,推进器的总功率为2×1 000 kW。根据NRP140舵桨推力-功率曲线估算,推进器可以提供2×16 t~2×17 t的推力,因此选择推力2×10 t、2×16 t和2×20 t用于计算。在总体坐标系中,尾部推力作用点见表1。
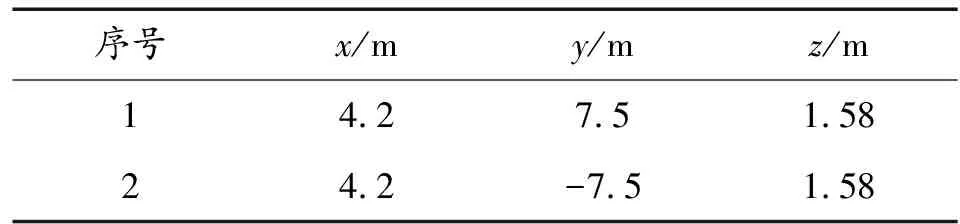
表1 尾部推力作用点
2.4 环境条件
选取以下3种计算工况:
1)自航工况:平台航行于静水中,不需要考虑风浪流等外部环境条件对其的影响。
2)作业工况:平台在单点系泊状态下作业,系泊系统的风向标效应使得FPSO的系泊力趋于最小。
3)自由工况:在极端恶劣海况下,系泊系统失效后,平台将进行自由慢漂运动,此种工况下可用尾部推进装置控制平台的运动。
作业工况和自由工况的参数如表2所示。
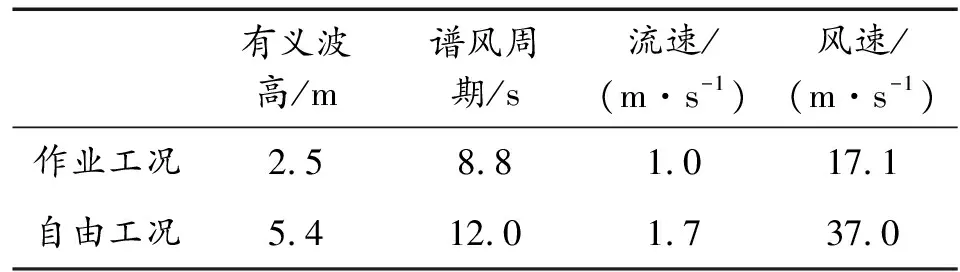
表2 作业工况和自由工况参数
由于平台具有风向标效应[9],围绕单点系泊塔回转,不考虑出现较大的横向风流作用。参考相关文献[10-12],选用6种风浪流方向Case,见表3所示。
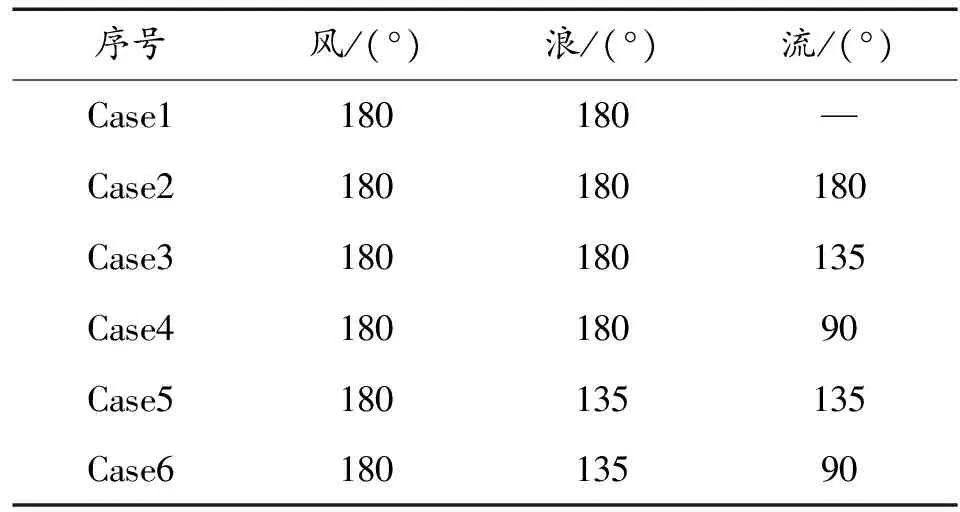
表3 风浪流方向组合
3 计算结果
3.1 自航工况
为确定平台在给定尾部推力下能够达到的航速,计算静水状态下平台各航速对应的总阻力,见图4。基于图4结果插值可知,在尾部推力大小为2×10 t、2×16 t和2×20 t下,平台能够达到的航速分别为6.07 kn、7.66 kn和8.55 kn。由此可以看出,在给定一个尾部推力时,平台能够具备一定的静水航速,此航速足够平台自行地移动,不需要拖船进行拖航。
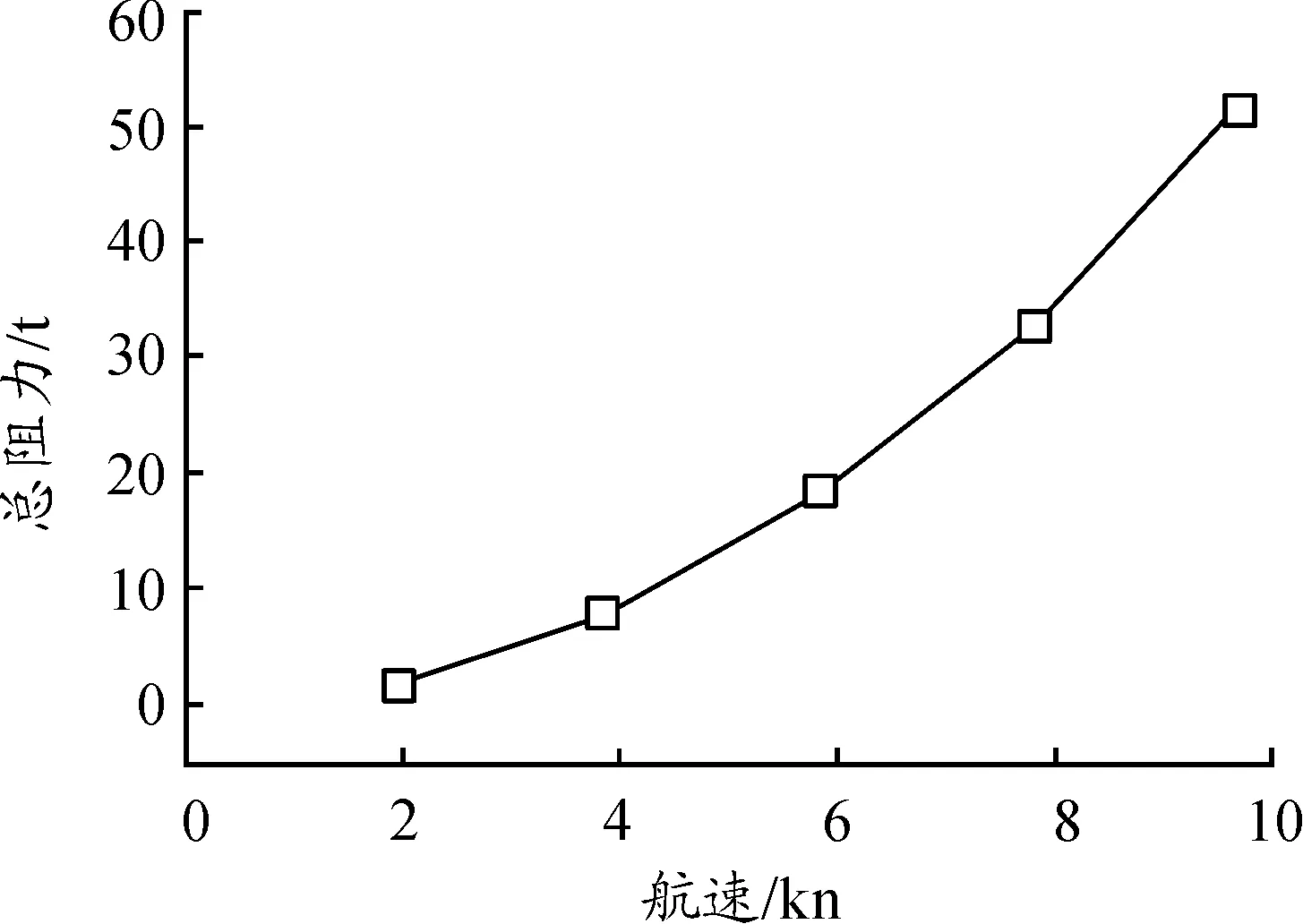
图4 航速-静水总阻力曲线
3.2 作业工况
在作业工况下,分析尾部推力对平台的纵、横向运动以及水平系泊力的影响。在不同风浪流方向组合下,平台的艏向将趋向于一个平衡位置。沿平台纵向施加一个尾部推力并不能改变平台的平衡位置,只会影响系泊力的大小以及船艏与系泊塔架的最小安全距离。在不同Case下,纵向施加不同大小的尾部推力对平台的纵向运动和水平系泊力产生的影响如表4所示。
在不同Case下,平台处于平衡位置时,横向施加尾部推力可以使平台围绕固定塔架进行旋转,沿横向顺时针或逆时针分别施加不同大小的尾部推力对平台的艏向平衡位置、船艏与软刚臂系统之间的最小距离以及水平系泊力的影响见表5~表7所示。
由计算结果可以看出,沿纵向施加尾部推力能够增大平台艏部与软刚臂系统之间的距离,避免平台和软刚臂系统发生碰撞。沿横向施加一个尾部推力时,可以改变平台的艏部平衡位置,从而实现定点排污。
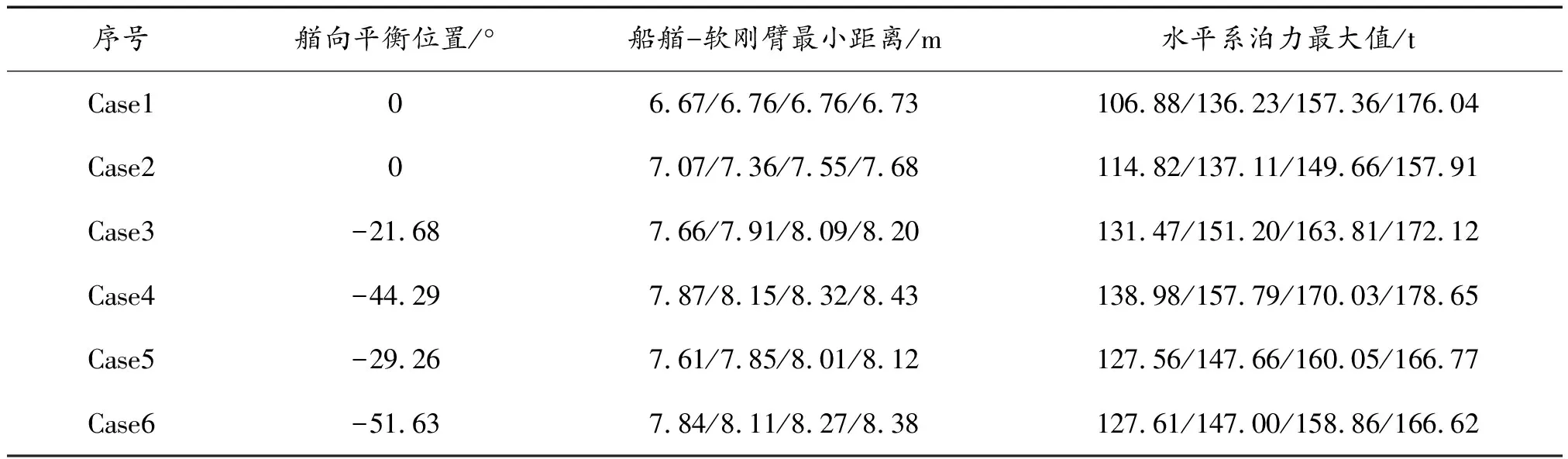
表4 纵向尾部推力对纵向运动和水平系泊力的影响
注:表4中“/”隔开的四组数据依次为无尾部推力、尾部推力2×10 t、2×16 t、2×20 t的结果。
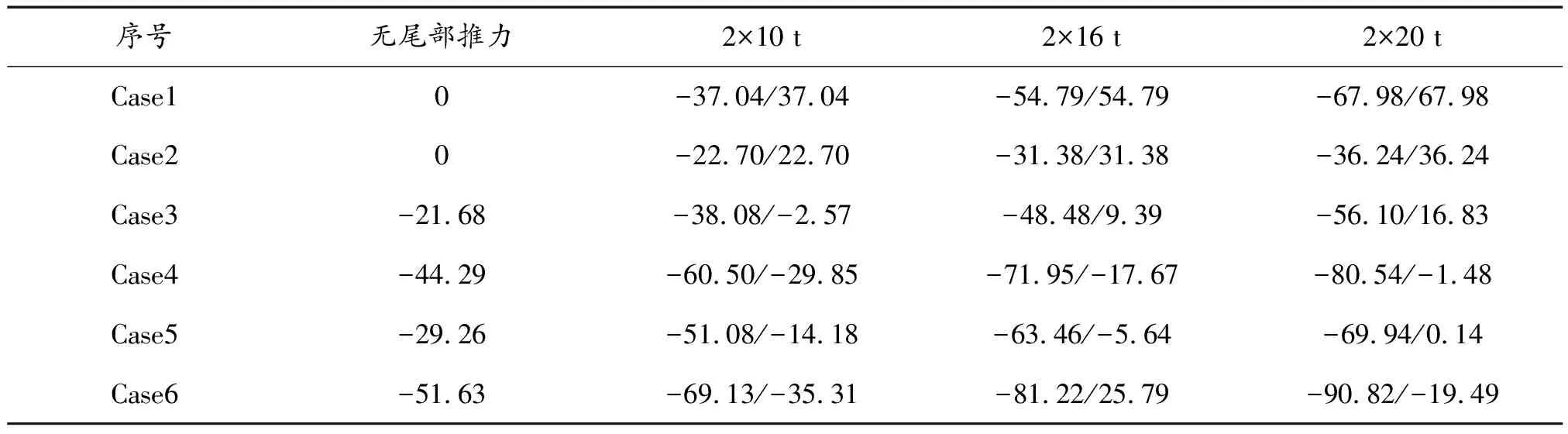
表5 横向尾部推力对艏向平衡位置的影响 (°)
注:表5~表7中“/”隔开的两组数据分别为顺时针横向、逆时针横向施加尾部推力的结果。
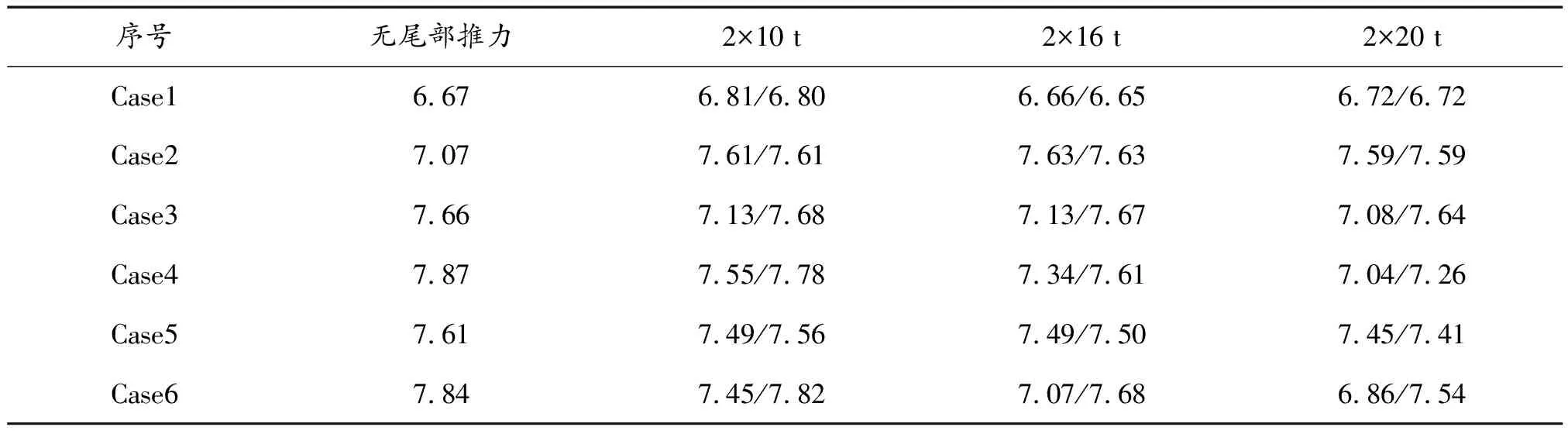
表6 横向尾部推力对船艏-软刚臂最小距离的影响 m
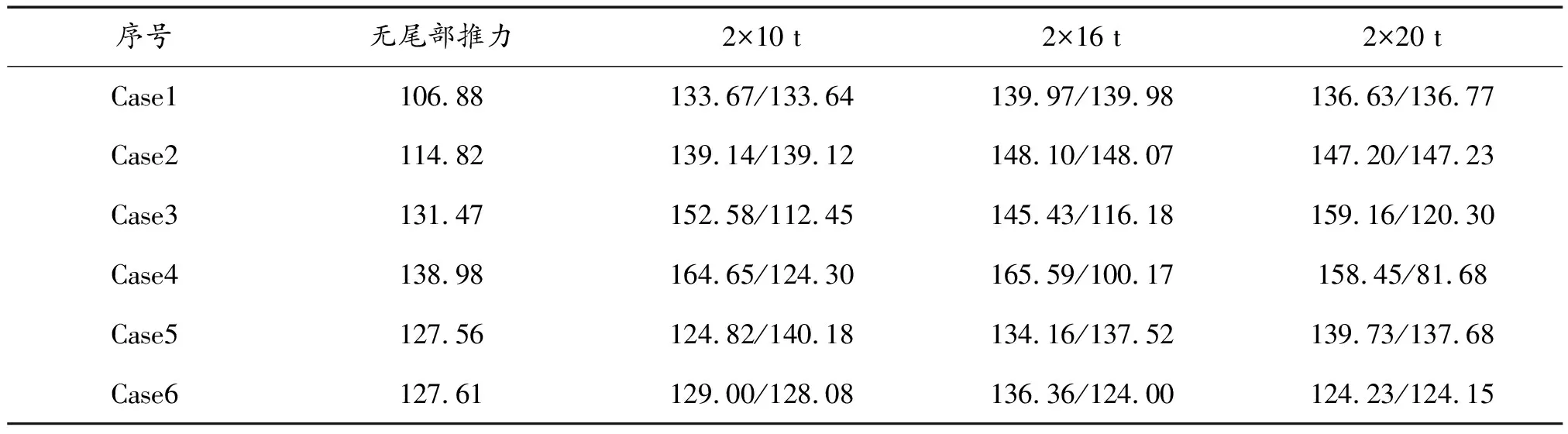
表7 横向尾部推力对水平系泊力的影响 t
3.3 自由工况
根据总体对尾部推力避碰功能提出的设计指标,在自由工况对应的海况下单点系泊失效后,对船体在尾部推力作用下的运动轨迹及避碰能力进行了评估。
海洋核动力平台作业区域为绥中36-1油田,该油田共有12座采油平台,由于目前还没有确定具体的场址位置,本文选取平台作业场址周边的一个海洋工程平台作为参考障碍物,根据平台的主尺度假定障碍物的尺寸为53.5 m(海洋平台的最大宽度)+81.7 m(平台总长的一半)=135.2 m。
选取Case2中的风浪流方向组合,选取尾部推力的方向范围为10°~90°,间隔为10°,同时始终保持在尾部推力作用过程中作用方向不变。分析不同尾部推力作用时,平台与参考障碍物可以避免碰撞的最小安全距离以及尾部推力作用时间,计算结果分别如图5、图6所示。
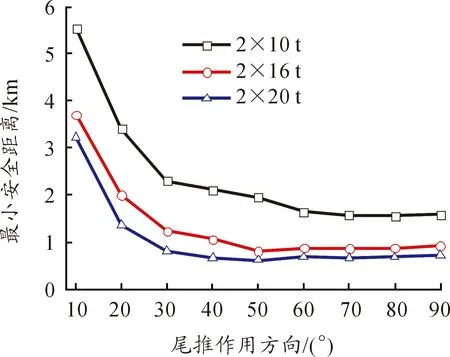
图5 尾部推力作用方向-最小安全距离曲线
施加不同的尾部推力时,平台与参考障碍物避免碰撞的最小安全距离以及最佳尾部推力的作用方向及时间如表8所示。由表8可以看出,自由工况时施加的尾部推力越大,最小安全距离以及尾部推力的作用时间就越小。
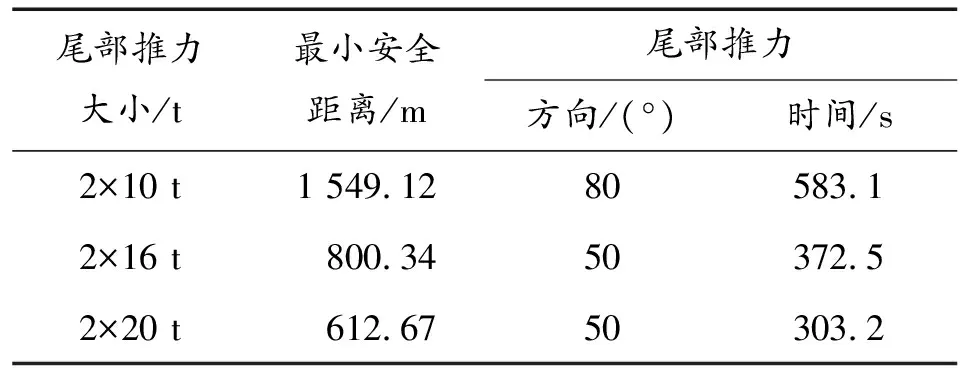
表8 最小安全距离
3.4 结果分析
本文通过研究尾部推进装置对平台的自航能力、作业工况时的横纵向运动以及水平系泊力,以及自由工况时的运动情况等几方面产生的影响,分析得到的结论如下:
1)自航工况:给定一个尾部推力时,平台能够达到6~8kn的静水航速,此航速足够平台自行地移动,不需要拖船进行拖航;
2)作业工况:沿纵向施加一个尾部推力能够增大平台艏部与软刚臂系统之间的距离,避免平台和软刚臂系统发生碰撞,然而效果并不显著,水平系泊力反而会明显增加;
3)作业工况:沿横向施加一个尾部推力时,可以改变平台的艏部平衡位置,从而实现定点排污。此时沿顺时针或逆时针横向方向施加尾部推力时,水平系泊力差别不大,且船艏-软刚臂之间的距离也相差不大,但两种方式对船艏平衡位置改变效果相差较大。这是由于尾部推力的存在会抵消一部分波浪、风、流载荷,且横向施加尾部推力会破坏平台的风标效应,使平台不再处于最小环境力的位置,从而会改变船艏的平衡位置。
4)自由工况:由图5和图6可以看出,自由工况时施加的尾部推力越大,最小安全距离以及尾部推力的作用时间就越小,同时也可以看出只需要平台与参考障碍物之间的距离大于最小安全距离,不同平台就不会发生碰撞。
5)自由工况:通过图5和图6还可以看出,要在恶劣风浪流作用下改变平台位置,采用尾推方式,需要的推力过大,结合考虑平台横倾较大、对单点的附加作用、使用工况难以确定等因素,尾推并不适合在较高海况下调整船体艏向。
4 结论
1)在平台自航工况、定点排污等作业情况下,尾部推进装置能够发挥较大的作用;
2)在自由工况下需要避碰时,尾部推进装置可以发挥一定的作用,但是在单点系泊状态下,尾部推进装置对避碰的作用较小;尾部推进装置并不能作为单点系泊系统失效后控制船体运动的备用选择,但开启尾部推进装置后平台有一定的偏航避碰能力。
猜你喜欢
中学生理科应试(2024年3期)2024-06-26 07:54:45
舰船科学技术(2022年20期)2022-11-28 08:19:02
山东冶金(2022年2期)2022-08-08 01:50:50
赤峰学院学报·自然科学版(2021年10期)2021-11-11 03:34:02
石油知识(2019年3期)2019-02-13 03:19:08
中学物理·高中(2016年11期)2016-12-15 01:30:36
工业设计(2016年11期)2016-04-16 02:48:21
珠江水运(2016年3期)2016-03-23 14:34:47
舰船科学技术(2015年8期)2015-02-27 15:38:44
中学教学参考·理科版(2013年2期)2013-04-03 09:05:30