一种双摆效应桥式起重机光滑鲁棒控制方法
2019-12-02 06:03张建一吴易鸣方勇纯
振动与冲击 2019年22期
孙 宁, 张建一, 吴易鸣, 方勇纯
(南开大学 机器人与信息自动化研究所,天津 300350)
随着现代工业化的发展,越来越多的欠驱动系统 被应用到工业生产中,其自动控制的实现也得到了自动化领域相关研究人员的广泛关注[1-5]。起重机系统是一类典型的欠驱动机电一体化系统,其具有很强的运载能力,目前被大量应用于货仓、车间、海港等其它工业场所,以完成货物装载与物料运输等工作。在货物运输过程中,由于系统状态之间高度耦合以及外界干扰的存在,当台车做加减速运动时,负载将不可避免地产生摆动,在这种情况下,货物运输的效率将受到极大的影响,同时还会带来安全隐患。目前,大部分的起重机系统仍采用人工操作的方式,而在一些对运输精度有较高要求的应用场所,仅靠人工操作很难实现对起重机的精准控制,同时难以消除负载残余摆动,带来安全隐患。因此,综合考虑上述现有问题,实现起重机系统的高性能自动控制具有十分重要的应用价值与意义。然而,起重机系统具有复杂的欠驱动特性,其自动控制问题依然存在许多难点与挑战。
为解决上述所提问题,近年来国内外相关学者针对起重机系统的防摆问题展开了深入的研究[6-19]。然而,大多数现有研究均将台车与负载视为单级摆动结构。但在实际应用中,相对于负载而言,吊钩质量无法直接忽略不计,而且吊钩与负载之间也存在一定的距离。在这种情况下,不仅吊钩会围绕台车摆动,负载也会绕吊钩产生二级摆动。因此,相比于单摆结构,考虑双摆效应的起重机模型能够更准确地反映系统的真实特性。然而,两级摆动效应给系统增加了一维不受控状态量,使系统的欠驱动性更强,其控制问题更是难上加难。目前,现有的基于单摆起重机的控制方法大多难以直接应用于双摆起重机系统或是难以得到理想的控制效果。
综上可知,针对双摆起重机系统, 设计有效的控制方法具有理论与实际的双重重要意义。截至目前,已有部分学者针对双摆起重机的控制问题提出了一些行之有效的控制方法,其中,现有方法大多数为开环控制方法[20-23]。Singhose等应用输入整形技术生成了台车运行的轨迹,并利用跟踪控制器对该轨迹进行跟踪,实现了台车定位,并消除了负载摆动。Zhang等针对双摆起重机消摆问题提出了一种在线轨迹规划方法。需要指出的是,虽然开环控制方法易于实现,但它们对系统参数不确定性以及外部干扰的影响十分敏感;另一方面,由于针对双摆起重机控制问题的研究仍处于早期阶段,相比于开环控制方法,闭环控制方法较少[24-29]。其中,Tuan等提出了一种离散变结构控制方法来实现对台车的精确定位以及两级摆动抑制。为了抑制系统的两级摆动,Masoud等构造了一种延时反馈控制器。针对双摆起重机系统中存在参数不确定性的情况,Sun等提出了一种自适应防摆控制策略,实现了台车的精准定位,并有效的抑制了系统的双摆摆动。此外,郭卫平等提出了一种基于系统无源性分析的方法,仿真结果证明其可以在一定程度上抑制系统的两级摆动。
针对存在两级摆动现象的起重机系统,本文提出了一种基于超螺旋(super twisting)的光滑鲁棒防摆控制策略,其能够在保证台车快速精准定位的前提下实现对双摆效应的有效抑制。具体来讲,首先分析了系统的动力学特性并简化了系统模型,在此基础上,构造了一个线性滑模面,并基于超螺旋思想提出了一种非线性鲁棒控制器。在理论方面,通过严格的理论分析证明了双摆起重机系统的闭环稳定性。在实际方面,硬件实验结果证实了所提控制策略具有优良的控制性能以及较强的鲁棒性。
1 问题提出
具有双摆效应的欠驱动桥式起重机系统的示意图如图1所示,其动态方程可以表示为
(1)

(2)

(3)
式中:M为台车的质量;m1和m2分别为吊钩和负载的质量;x(t)为台车的水平位移;θ1(t)和θ2(t)分别为吊钩和负载相对于竖直方向的摆动角度,即第一级摆动与第二级摆动;L1为吊绳长度;L2为负载中心与吊钩中心之间的距离;u(t)为施加在台车上的控制力。
从式(1)~式(3)可以看出,系统有三个被控状态量x(t),θ1(t)和θ2(t),但只有一个控制输入u(t),这表明该系统有两个欠驱动度,而传统的单摆起重机的欠驱动度只有一个,因此,本文所研究的问题更具挑战。

图1 双摆桥式起重机结构示意图Fig.1 Schematic diagram of double-pendulum bridge cranes
起重机系统的控制目标是驱动台车到达指定位置xd,同时有效抑制两级摆动并消除残余摆动,即
(4)
在后续内容中,将设计一种鲁棒控制器实现式(4)中所描述的控制目标。
2 主要结果
这一节将详细描述本文所取得的主要成果。首先,对系统的动力学模型进行了初步分析和处理,进而给出了控制器设计过程以及相应的理论分析。
2.1 模型变换
在进行控制器设计之前,首先对原系统模型式(1)~式(3)进行合理的近似处理。考虑到在实际应用场景中,摆角θ1(t)和θ2(t)通常会保持在10°以内,因此存在近似关系
cosθi≈1, cos(θ1-θ2)≈1, sinθi≈θi
基于上述角度的近似关系,可将原系统模型在平衡点附近做近似线性化处理,同时将式(2)和式(3)分别除以(m1+m2)L1和m2L2,可以得到系统近似模型为
(5)
(6)
(7)
接下来,构造广义信号
φ=x+L1θ1+L2θ2
(8)
从几何关系可以看出,上述广义信号可以近似地反映负载的水平位移。将式(8)对时间t求二阶导数,可得
(9)
将广义信号表达式(9)代入式(7),并对所得方程进行整理可知
(10)
进一步可以求得θ2(t)关于时间t的一阶导数与二阶导数的表达式为
(11)
另一方面,用式(7)减去式(6),易得
(12)
将式(10)和式(11)代入式(12),整理可得
(13)
同理,不难得到关系式
(14)
结合式(8)、式(10)和式(13),可以将台车的位移表示为
(15)
对式(15)求二阶导数,不难得到台车的加速度表达式
(16)
根据式(11)、式(14)和式(16),可将动力学方程式(6)改写为
(17)

m1+m2。
综上所述,可知系统中的所有状态量以及控制输入都可以由新定义信号φ(t)和其导数的代数组合表示,故具有双摆效应的起重机系统是微分平坦的[30],且此系统的平坦输出即是广义信号φ(t)。针对于这一特性,可以得知由式(5)~式(7)表示的系统动力学方程与式(17)在本质上是等价的。
根据式(17)的结构,更准确的双摆起重机动力学模型可描述为
(18)
式中:w为集总干扰项,它表示由未建模系统动态、外界干扰以及近似线性化处理等其它因素所带来的干扰的集合。因实际物理约束的存在,集总干扰项以及其导数都是有界的,即
(19)

2.2 控制器设计
根据微分平坦性质,可以得知式(4)所描述的控制目标与式(20)是等价的
φ(t)→xd,φ(i)(t)→0,i=1,2, …, 6
(20)
式中:xd为台车的目标位置。不失一般性,针对于上述控制目标,可以选择设计控制器使φ(t)能够跟踪满足如下条件的参考轨迹φr(t)
(21)
定义误差信号为
(22)
进而可得系统开环误差方程
(23)
为了实现系统的控制目标,需要设计合适的控制器使e(i)(t)→0,i=0,1,…,6,为此,构造如下的滑模面
(24)
式中:各参数λi,i=0,1, …,4满足如下赫尔维兹多项式
s5+λ4s4+λ3s3+λ2s2+λ1s+λ0=0
(25)
将滑模面表达式(24)关于时间求导,并结合式(23),经过整理,易得到
(26)
根据(26)的形式,本文提出一种基于超螺旋的连续鲁棒控制律,表达式为
(27)
式中:sgn(*)为符号函数,当*>0时sgn(*)>0,当*<0时sgn(*)<0,且当*=0时sgn(*)=0;k1和k2为正的控制增益,在理论上需满足
(28)
式中:q和p为满足如下关系式的辅助参数

定理1所提控制器式(27)可以实现表达式(4)中描述的控制目标,并可以保证系统中所有闭环信号有界。
证明将控制器表达式(27)代入式(26)中,可得闭环动态方程
(29)
接下来,通过引入变量ς,可将式(29)改写为

(30)
进而,结合式(28),并应用文献[31]中定理2,可以推导得出,在有限时间内
(31)
且结合式(19)中给出的边界条件,进一步可以得知

(32)
根据式(24)中给出的线性滑模面的形式,不难得到
ε(ι)→0,ι=0,1,…,6
(33)
结合式(4)、式(8)、式(20)~式(22),可以证得

(34)
此外,根据线性滑模面式(24)的性质,结合式(32)可知
ε(ι)∈Λ∞,ι=1, 2, …, 6
(35)
在此基础上,由式(21)、式(24)和式(27)可推得
υ∈Λ∞
(36)
综上,结合式(33)~式(36),可知定理1成立。
注1从式(27)中所给出的控制器形式可以看到控制器包含了高阶项[ε(ι)(τ),ι=2,…,5],这些高阶项在实际中均是可以获取的。具体而言,联合式(10)、式(11)、式(13)、式(14)和式(22),可得
参考轨迹φρ(τ)的高阶导数均存在且已知,因此控制器式(27)中所包含的高阶项[ε(ι)τ,ι=2, …,5]均可获得。
3 实验与分析
为验证所提出方法的实际控制性能,在自主搭建的双摆桥式起重机硬件实验平台上进行了一系列实验。硬件实验平台如图2所示,该平台由机械平台与电气平台两部分构成。其中,台车、吊钩、负载与导轨等构成了机械平台;电机、伺服驱动器、编码器、运动控制卡及上位机等构成了系统的电气部分。具体而言,在系统运行过程中,台车的位移通过电机内置编码器获取;负载摆角与吊钩摆角通过编码器实时测量获得。上述编码器信号由运动控制卡采集并发送至上位机,经过计算后得到控制信号,再经过运动控制卡输出至电机驱动器,驱动电机运动,以实现控制目标。
硬件实验平台的相关参数为
M=6.5 kg,m1=2.003 kg,m2=0.559 kgL1=0.53 m,L2=0.4 m
(37)
台车的目标位置为xd=0.6 m,因此
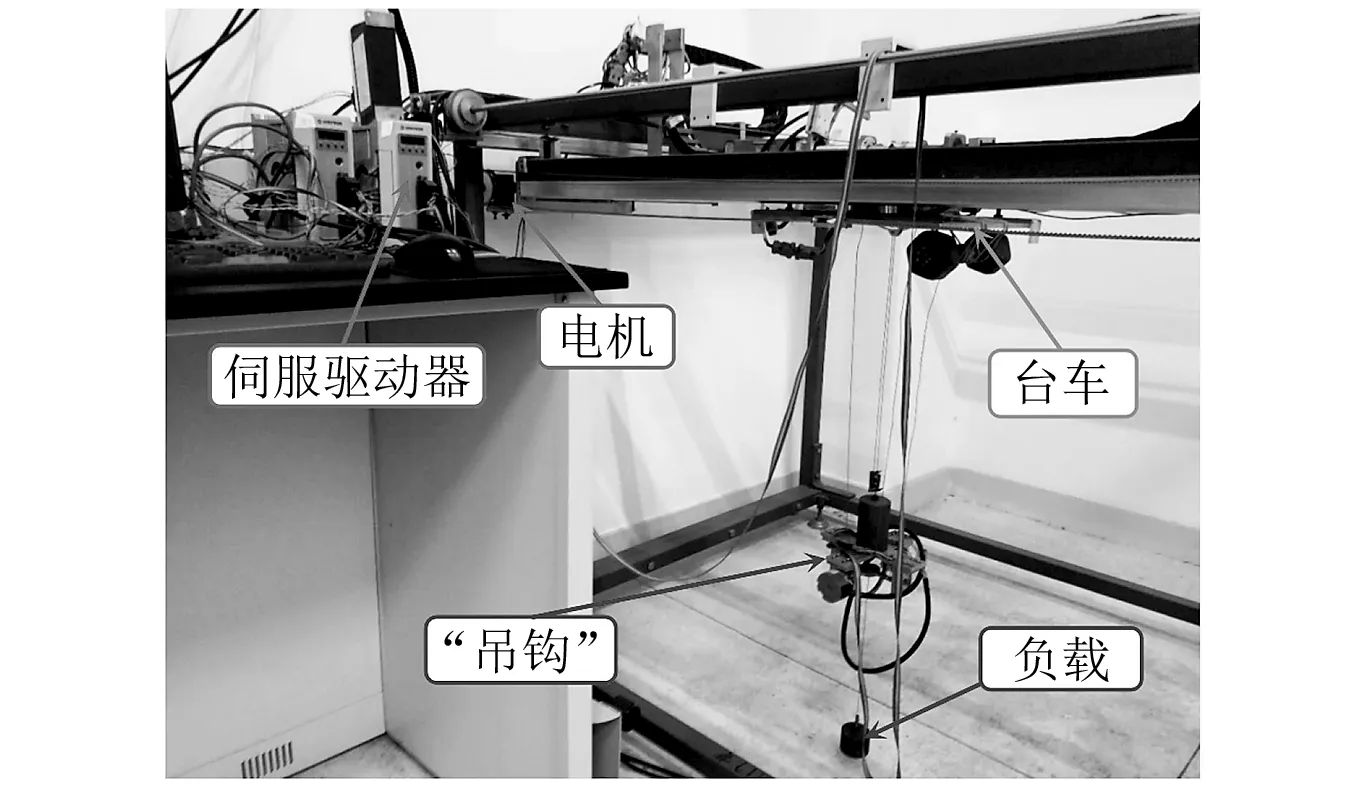
图2 双摆桥式起重机实验平台Fig.2 Hardware platform of double-pendulum bridge crane
通过数次实验调节,控制器式(27)的控制增益选择为
k1=40.117,k2=9.836λ0=97.656 3,λ1=195.312 5,λ2=156.25λ3=62.5,λ4=12.5
(38)
为证实文中所提出控制方法具有优良的性能,选取LQR控制方法作为对比实验。LQR控制器的表达式为
式中:ka,kb,kc,kd,ke,kf为控制增益,其目标函数选择为


ka=56.568 5,kb=29.371 4,kc=-65.591 1,kd=4.300 8,kb=2.397 6,kc=-3.785 9
实验结果见图3~图4以及表1。实验曲线由上而下分别代表台车位移、一级摆动、二级摆动以及控制输入。表1中:xf为台车的最终到达位置;θ1 max和θ2 max分别为一级摆角和二级摆角的最大幅值;相应地,θ1 res和θ2 res分别为台车停止运行之后一级摆动和二级摆动的最大残余摆幅。图3是所提控制器的实验结果,从图3中可以看出,台车在4 s左右平稳地运行到了给定位置,同时结合表1给出的性能指标可知,在整个运行过程中,一级摆动和二级摆动均被抑制在2.5°以内(θ1 max=1.9°,θ1 max=2.4°),且几乎不存在残余摆动(θ1 res=0.2°,θ2 res=0.4°)。图4以及表1给出了LQR控制器的控制效果和控制性能,相比于图3中的实验结果可知,在运送效率相似的情况下,使用LQR控制方法时系统的一级摆动的最大摆幅约为6.8°,而二级摆动的最大摆幅更是达到了8.5°。这表明本文所提出控制算法在摆动抑制方面具有更好的性能,同时,2.5°左右的最大摆幅足以满足绝大多数工作场所的要求,上述实验结果以及控制性能指标表验证了所提方法的有效性,也说明了所提方法具有实际应用的价值。

图3 本文所提方法实验结果Fig.3 Experimental results of the proposed method

图4 LQR控制方法实验结果Fig.4 Experimental results of the LQR control method
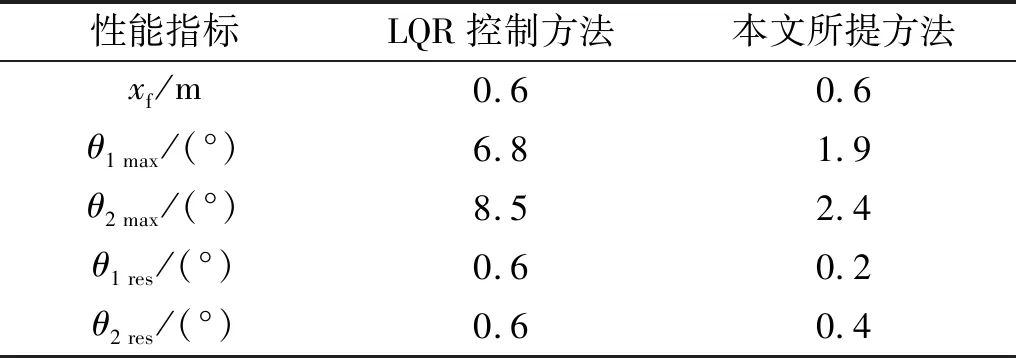
性能指标LQR控制方法本文所提方法xf/m0.60.6θ1 max/(°)6.81.9θ2 max/(°)8.52.4θ1 res/(°)0.60.2θ2 res/(°)0.60.4
4 结 论
为解决存在复杂双摆效应的欠驱动起重机系统的消摆定位控制问题,本文提出了一种有效的光滑鲁棒控制方法。首先对原动力学方程进行分析并得到了系统的近似模型,该模型可有效地描述双摆起重机的特性。基于此近似模型,构造了线性滑模面,并提出了一种基于超螺旋的非线性连续光滑控制律,实现了台车的精准定位与负载摆动的有效消除。同时,通过严格的理论分析证明了闭环系统的稳定性,并进行了一系列硬件实验测试,实验结果验证了所提方法的有效性与优良的控制性能。
猜你喜欢
南方农机(2023年1期)2023-01-22
山东冶金(2022年2期)2022-08-08
交通科技与管理(2022年8期)2022-05-07
昆钢科技(2020年6期)2020-03-29
中国计量大学学报(2019年3期)2019-11-08
家庭科学·新健康(2018年10期)2018-12-15
科技与创新(2016年17期)2016-11-04
会计之友(2015年15期)2015-08-11
铸造设备与工艺(2015年3期)2015-07-11
汽车科技(2015年1期)2015-02-28