钢球式分离机构设计探讨
2019-12-02 05:53:08张云海
数字海洋与水下攻防 2019年4期
张云海,谷 泉
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
近年来,海洋无人装备因使用广泛、低成本、可执行多类任务等优点,越来越受到关注。海洋无人装备在布放或回收过程中,大都会用到分离机构。水下分离机构的驱动力除了可采用气动或爆炸力、电磁(机)力等形式外,还可以直接利用一定深度的水压力驱动,这样可以使结构更简单、安全性更高。一般情况下,气动、爆炸力、电磁力可利用极小的电能产生较高的瞬时动能,因而可直接利用其驱动构件做分离动作。水压力则随深度不断变化,用作分离驱动力时一是动作精度难以保障,二是需要一些控制件和弹簧来作对运动件限制的约束。钢球因其几何形态及摩擦学方面的独特性质,在各类机械设备和产品中用途广泛。钢球作为力与运动传递的媒介可与许多构件组合为功能独特的机构[1],成为水下分离机构中控制件的首选。
钢球式分离机构是一类采用钢球作为运动控制件水下自动动作装置,既可以作为连接件将各部分组合成整体,也可以在平台或载体上配置一定负荷,满足其工作条件时,完成分离分解功能。其工作原理主要是依靠若干钢球承受连接载荷,通过球形的几何特性,利用钢球不同接触部位和接触面不同的圆锥角产生的法向力及摩擦力,来传递力和控制机构运动。此类机构最重要的特征是可用极小的支撑力(几N),控制分离件上承受成千上万倍的连接力,一旦控制力消失或施加,机构可迅速完成分离分解动作。2种典型结构示意见图1。
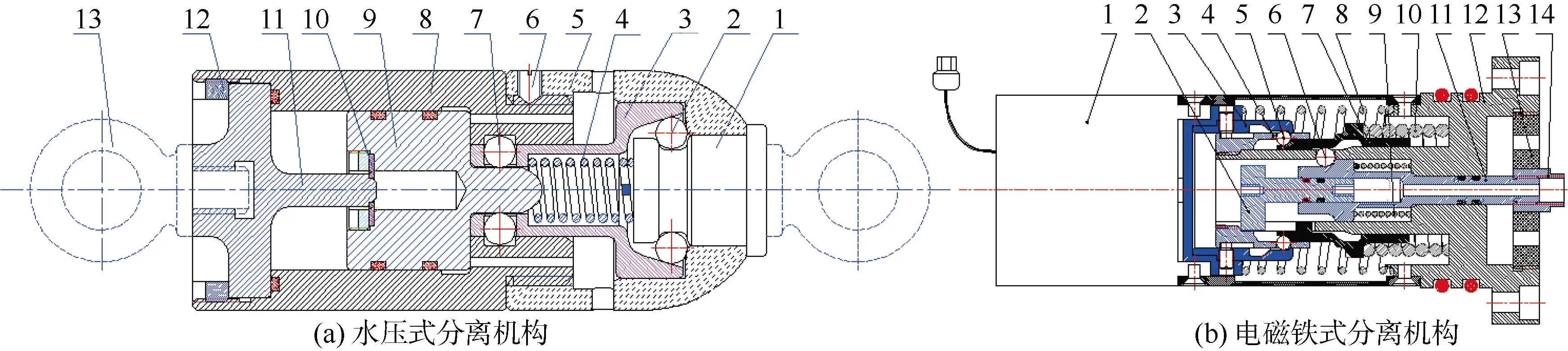
图1 钢球式分离机构常见结构Fig.1 Normal structures of steel ball type separation mechanism
图1(a)所示的水压式分离机构工作原理是利用基体(8)、控制杆(9)和顶杆(11)形成一个感受水压的密封腔体,控制杆(9)用控制片(10)限位于初始态,使控制钢球(7)卡在基体(8)的凹槽内,滑套(3)无法向左移动,分离头(1)螺孔连接上吊环与下吊环呈各种连接态,根据设计尺寸大小该机构可承受数10 kN拉力。当机构有外压作用时,控制杆(9)向空腔运动,使控制片(10)形变,当外压作用力超过控制片(10)的剪切力时,控制片(10)被剪切,控制杆(9)向左运动,控制钢球(7)在弹簧(4)的作用下从基体(8)槽内脱落,滑套(3)开始向左运动,在拉力和弹簧力的作用下,承力钢球(2)从分离头(1)的凹槽内被挤出,完成分离动作。其中控制片的材料和结构形式经专业设计和测试,能保证各动作深度值误差不大于6%。
图1(b)所示的电磁铁式分离机构的动作过程为:当水下无人装备在一定深度上需要抛载或投放设备时,电磁铁(1)产生的驱动力,使外滑环(3)克服弹簧(8)支撑向右移动一定距离,解除对钢球(5)的限位,内滑环(7)在压簧(10)的作用下向左运动,解除对钢球(6)的限位,伸缩杆(14)、(11)在水压的作用下向左运动,缩回基体(12)、(13)内,实现抛载和投放功能。为了做到在陆地上整体不拆卸状态下多次重复使用和性能测试,增加了回拉杆(2)和复位弹簧(9),通过简单工装可以实现机构动作后的复位。已完成设计的分离机构采用行程5 mm,动作力25 N的电磁铁,可实现在深海4 000 m环境下的抛载或其它功能需求。
1 受力分析
上述图例中均涉及 2级钢球控制的受力结构形式,通过接触钢球部位和角度等结构分析计算设计表明,能将数10 kN的连接力或数km深海水压力转化成数牛或数10 N的控制力,来实现水下精确分离动作,为纯粹的机械(如水压)控制设计提供了理论基础。
1.1 承力钢球力学方程
以图1(a)为例,作用在分离头上的拉力及弹簧力F(包括拉及弹簧力),通过数颗均布承力钢球传递到滑套和基座上,图2是单颗承力钢球受力示意图(未考虑钢球重力),理想情况下钢球每个接触点受力均为通过球心的法向力Na/b/c和相应的切向摩擦力fa/b/c[2]。

图2 承力钢球受力Fig.2 Stress of bear ball
在分离前,有承力钢球受力平衡方程组:
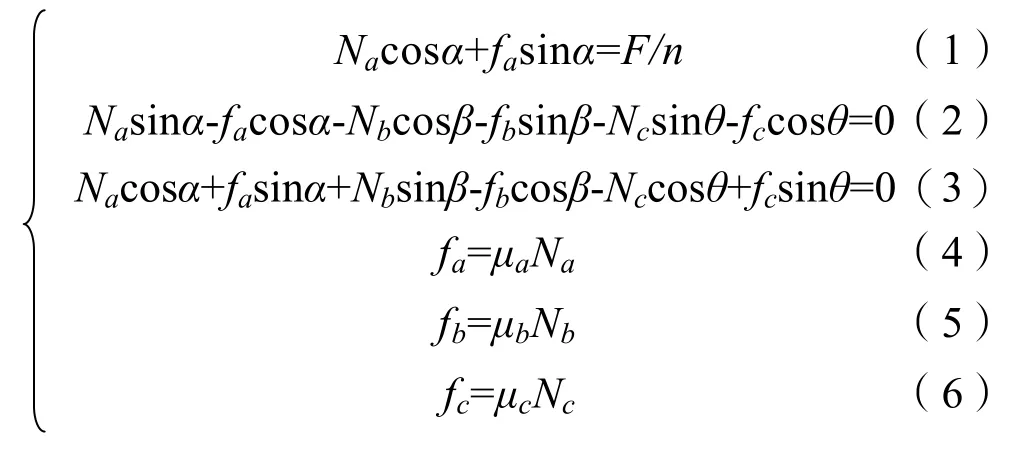
式中:F为作用在分离头上的拉力及弹簧力之和;Na、Nb、Nc为各接触点钢球法向力;fa 、fb 、fc为各接触点钢球切向力;μa、μb、μc为各接触点钢球与接触面静摩擦系数;α、β、θ为钢球与接触面法向力角度;n为承力钢球数量(均布)。
当滑套(3)受力F’=n(fbcosβ-Nbsinβ)大于弹簧(4)的预压力时,滑套(3)将始终不会向左移动,保持在锁定位置。分析计算中以此作为弹簧(4)预压力设计输入,为保证动作可靠,还可取2-3倍安全系数作为保障。
1.2 控制钢球力学方程
图3是单颗控制钢球受力示意图。作用在滑套(3)上的弹簧力克服F’后,加载到均布的控制钢球(7)上,使控制钢球(7)和基体(8)凹槽 2点接触,形成角度φ上的向内推力,钢球向内挤压控制杆(9),不考虑钢球的重力,同样控制钢球每个接触点受力均为通过球心的法向力N1/2/3和切向摩擦力f1/2/3。
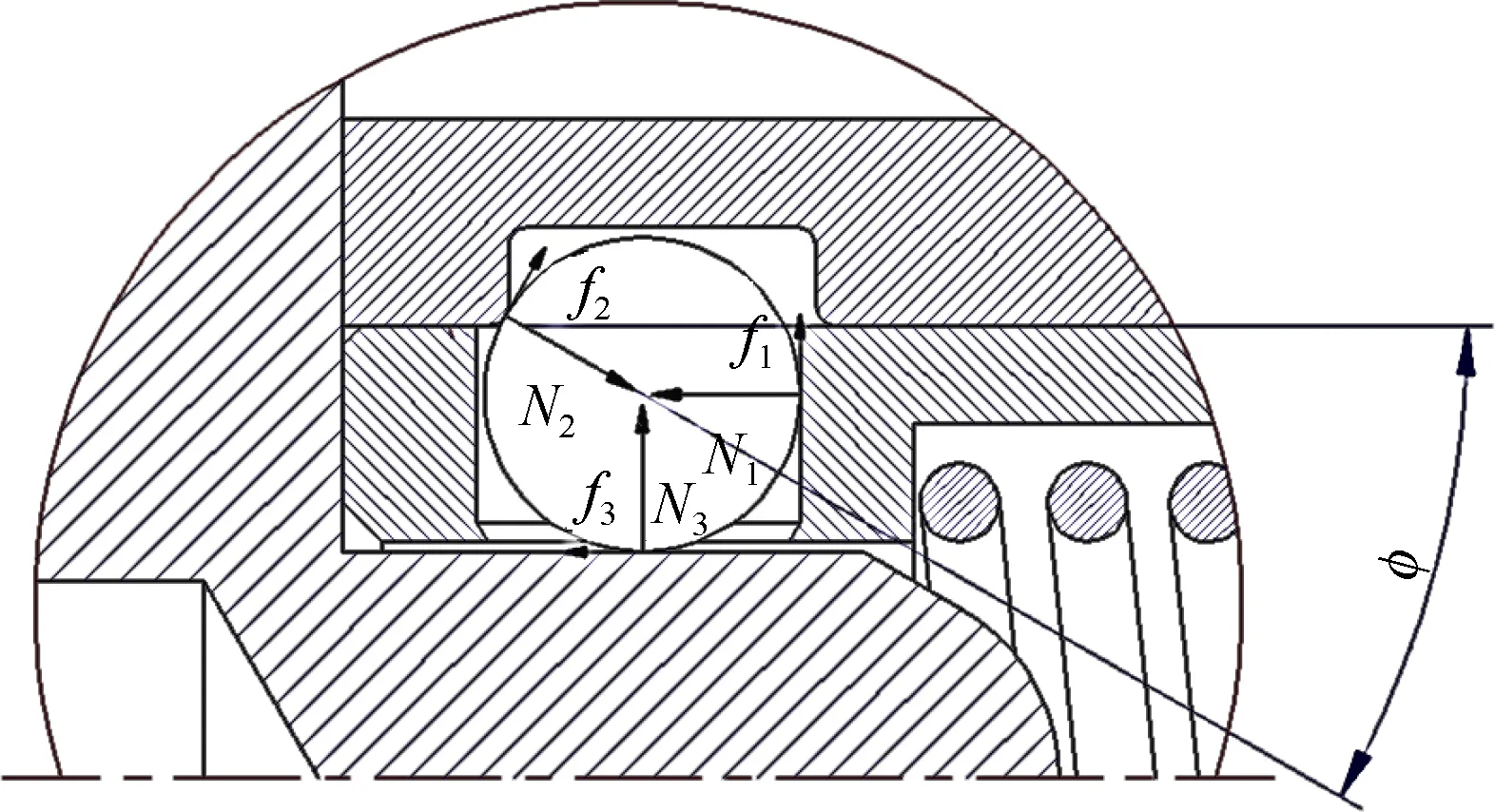
图3 控制钢球受力Fig.3 Stress of control ball
此时,有力平衡方程式
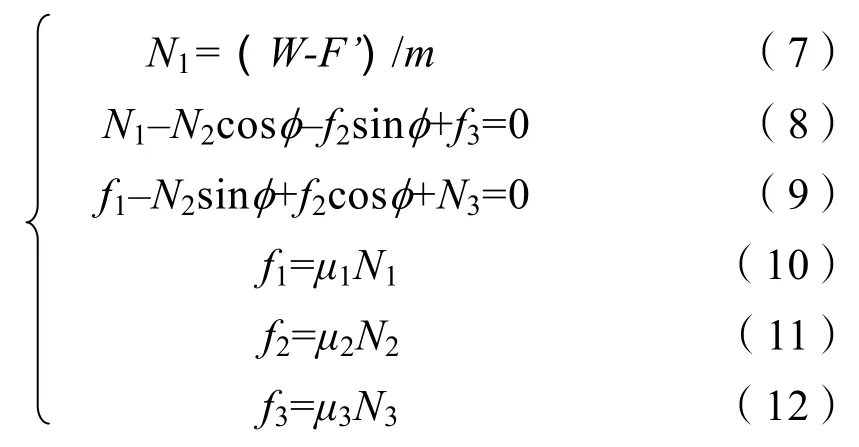
式中:W为弹簧初始作用力;N1、N2、N3为控制钢球各接触点法向力;f1、f2、f3为控制钢球各接触点切向力;μ1、μ2、μ3为控制钢球与各接触面静摩擦系数;φ为控制钢球与接触点法向力角度;n为控制钢球数量(均布)。
可解算出控制钢球对控制杆的锁紧力即静摩擦力为n×f3,因此作为控制机构动作的外力,在机构需要动作时应大于静摩擦力n×f3。
2 算例
按图1(a)分离头受到极限载荷50 kN为例,计算当承力钢球数量为 10颗,控制钢球数量为 3颗,钢球直径10 mm的各部分不同接触角度和斜面弹簧及控制片受力情况。为简化计算工作量,弹簧初始作用力均按理论最小弹簧力的2倍取值,计算结果见表1。
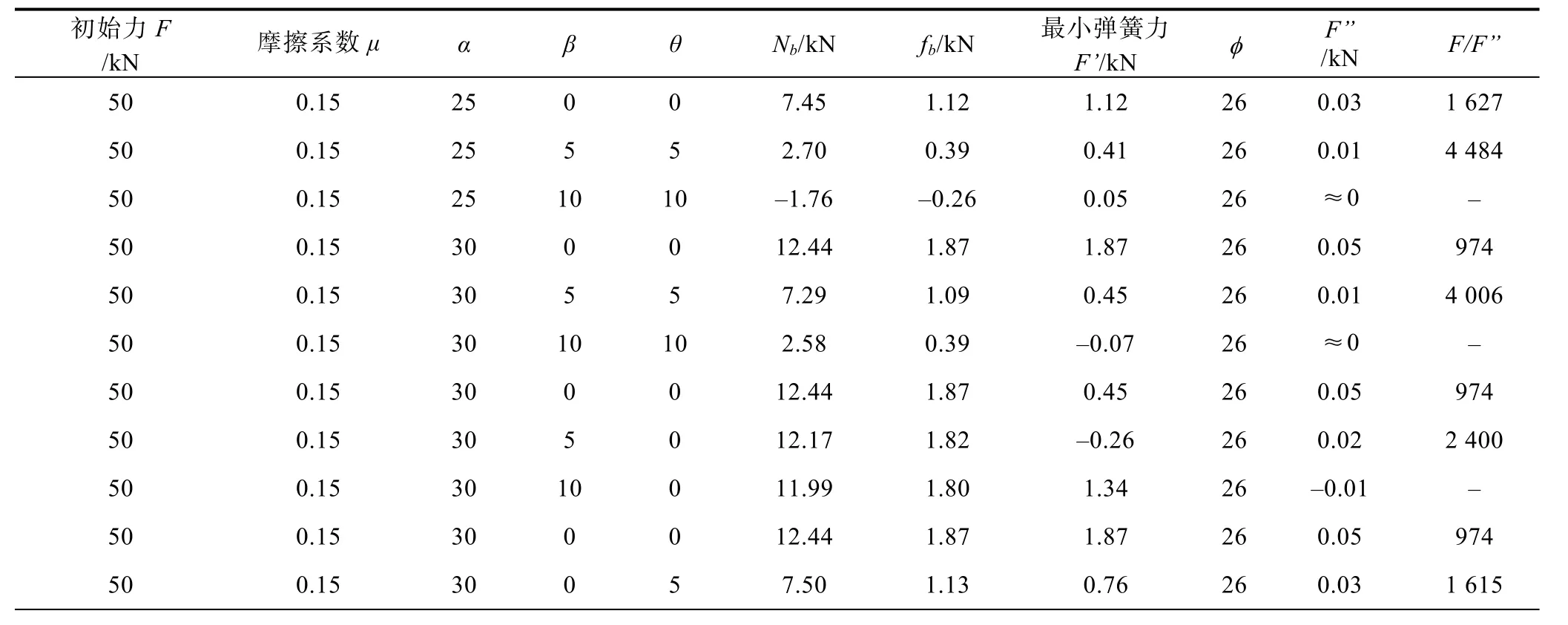
表1 不同接触角度和工作斜面下钢球受力计算值Table 1 Calculated force values of steel ball under different contact angles and working inclined surfaces
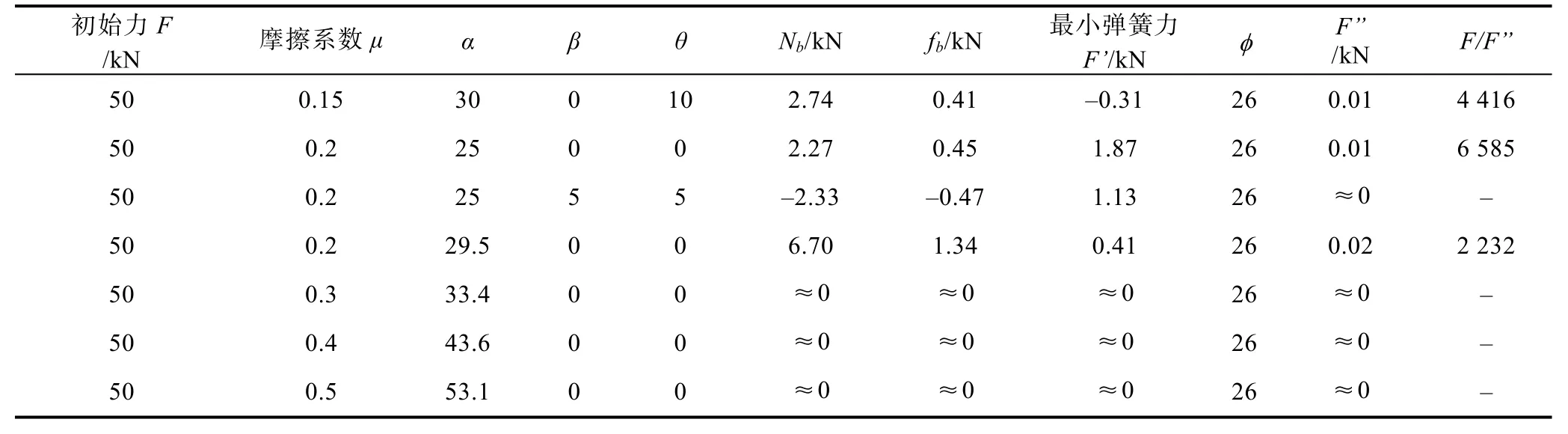
表1(续)
3 计算结果讨论
表 1按钢与钢静摩擦系数 0.15为例,计算了承力钢球不同的受力接触角α、β、θ时滑套受力及弹簧最小设计值。结果显示:
1)当α角一定时,增加β、θ角度,滑套受的正压力Nb减小,相应的摩擦力随之减小,并会出现负值情况,表明钢球已从有向外运动趋势变为有向内运动趋势,发生自锁。因此,适当的钢球接触面优化设计,可提升动作性能,并减小弹簧最小设计值,使机构动作更可靠。
2)当β、θ角一定时,α角度与滑套受的正压力Nb呈正比关系,设计时α必须大于钢球与接触面的静摩擦系数自锁角。即设计时α必须大于钢球与接触面的静摩擦系数自锁角,即但不宜过大,若α太大,相应的正压力Nb、摩擦力也会很大,所需弹簧力设计值、控制力也会增加,结构将更庞大。
3)钢球式连接分离机构一般选用高强度结构钢作为基材,进行防腐耐磨处理。此时,影响摩擦系数的因素有法向载荷大小、材料表面硬度、粗糙度以及接触形式、锈蚀润滑情况等[3]。摩擦临界角(自锁角)会在一个范围内波动。李文平等[4]在对不锈钢球的摩擦学特性研究中,发现 GCrl5球、陶瓷球在与不同材料球座配副的摩擦系数均会出现一定程度的波动,摩擦系数在整个试验周期内均呈逐渐上升趋势,见图4。理论上钢与钢静摩擦系数μ=0.15~0.21,所对应的摩擦自锁角约为8.53°~ 11.86°[5]。若机构长时间承力连接不动作,且未润滑时,实际考虑干摩擦因素的影响。林乃明等[6]通过电化学处理对316不锈钢摩擦学性能的影响研究表明,316不锈钢基材与GCrl5和Si3N4陶瓷球对磨时,摩擦系数在0.55~0.56之间小幅波动。若采用钢球作为力或者运动控制媒介,在长期贮存后需要经常维护保养,否则在设计时应考虑的动作角度比计算值要更大一些。
4)Si3N4陶瓷球维氏硬度为 14 000~17 000 N/mm2,轴承钢的维氏硬度为 7 000~8 000 N/mm2,具有硬度高、耐热性好、耐蚀性强和重量轻等许多优良特点,更适合于海洋环境下动作机构设计,王泉等[7]进行的Si3N4陶瓷球磨削和精研加工工艺的研究,已研制出 G5级陶瓷球。彭润玲等[8]通过对 Si3N4陶瓷球、GCrl5钢球与 TiNi60合金配副的摩擦系数对比研究,发现陶瓷球摩擦学性能优异,更适合作为低速轻载轴承用于摩擦学领域。因此,开展陶瓷球分离机构研究试验或将避免目前水雷武器装备在长期储存后导致的许多问题。
5)钢球式连接分离机构中由于钢球硬度远大于接触面材料硬度,若外载荷或施加的力矩过大,会引起与钢球接触零件出现局部形变,从而改变受力方向,导致设计动作角的变化。因此,设计时应对与钢球作用部位进行接触强度校核,通过提高与钢球接触的零件表面硬度、尺寸及形位公差精度要求,以及避免尖锐棱角接触或采用多钢球均匀受力减小接触应力等方式,提升机构动作性能。
4 结束语
本文对钢球式分离机构多级控制常用的组合结构进行了受力分析计算,通过设计参数的优选,可使该类连接-分离自动转换机构获得较稳定的力学放大(缩减)效应,能实现用极小的力控制较大的连接载荷分离,达到四两拨千斤的效果。该类机构安全性和可靠性较高,结构简单、性价比高,可广泛在深海装备中推广应用。
猜你喜欢
现代矿业(2024年1期)2024-03-26 04:04:40
农村电气化(2023年7期)2023-08-07 02:13:36
实验流体力学(2022年5期)2022-12-09 08:59:12
湖南大学学报·自然科学版(2020年4期)2020-05-06 09:11:03
表面技术(2019年2期)2019-02-26 02:22:52
北京航空航天大学学报(2019年1期)2019-01-30 01:31:22
智富时代(2018年6期)2018-08-06 19:35:08
材料与冶金学报(2016年1期)2016-05-10 03:59:55
中国科技博览(2016年4期)2016-04-25 08:37:13
电工技术学报(2015年24期)2015-10-25 05:52:13