MHD角速度传感器微弱噪声的测量方法*
2019-11-27 05:14杨凯丽吴腾飞徐冲柯李醒飞
传感技术学报 2019年11期
杨凯丽,吴腾飞*,徐冲柯,张 云,纪 越,李醒飞
(1.天津大学精密测试技术及仪器国家重点实验室,天津 300027;2.天津工业大学电工电能新技术天津市重点实验室,天津 300387)


1 MHD角速度传感器工作原理及噪声分析
MHD角速度传感器的工作原理如图1所示,图1(a)是传感原理示意图,图1(b)是传感器结构剖面图。图1(a)中下部圆环为永磁体,提供外磁场B,上部圆环为图1(b)中环形通道灌装的导电流体。环形通道上下表面分别为绝缘压套和密封套,内外表面分别为金属芯柱和外壳。
传感器通过安装孔固定于待测物体,当待测物体在敏感轴方向以角速度ω旋转时,永磁体和环形通道相对惯性空间产生角位移。导电流体惯性较大,相对于惯性空间几乎静止,导电流体相对磁场B存在相对速度vq。导电流体切割磁感线,从而在环形通道内外壁之间产生动生电动势E。通道内表面芯柱连接内电极,外表面外壳连接压盖处外电极,内外电极输出信号即流体通道内外壁之间的电动势[22]:
(1)
MHD角速度传感器的噪声源主要包括外部噪声和内部噪声。由于传感器电磁屏蔽不完善,外部的电磁干扰会对传感器的输出产生影响,而传感器内部等效电气元件的阻抗是内部噪声的主要来源。若忽略等效感抗和容抗,MHD角速度传感器可看作一个电压源串联几个等效电阻。如图2所示,E即图1中的动生电动势,R1和R2表示环形通道内外导电通道的等效电阻,Rfluid表示导电流体的等效电阻。

图2 MHD角速度传感器等效噪声模型
MHD角速度传感器内阻热噪声电压噪声谱密度Es可根据电阻热噪声频谱密度公式计算:
(2)
2 MHD角速度传感器噪声的测量方法
2.1 基于互功率谱估计的噪声测量原理
图3所示为基于互功率谱估计的MHD角速度传感器噪声测量方法。MHD角速度传感器噪声信号同时送入两个前置放大通路中,若通路1和2的等效输入噪声电压分别为En1(t)和En2(t),则通路1和2的输出信号可表示为:

(3)
(4)
式中:h1(x)和h2(y)分别为通路1和2的脉冲响应,而Es即MHD角速度传感器待测噪声。E1(t)和E2(t)被同步采集并进行互功率谱估计,则该双通路信号的互相关函数可以表示为:

(5)
根据维纳-辛钦定理,互功率谱密度为:

(6)
前置放大通路采用电池供电,并加以隔离和屏蔽,从而保证两个通路的噪声及干扰不相关,即En1(t)和En2(t)互不相关。将式(3)~式(5)代入式(6),则可得到MHD角速度传感器的电压噪声谱Es(ω)[24]:
(7)


图3 微弱噪声测量的互功率谱估计方法
但在实际中,对两个通路输出噪声信号的互功率谱估计是在有限时间内进行的,前置放大通路的噪声仍然会引发互谱估计的偏量,并导致较大的方差,因此需要基于噪声匹配原则对前置放大通路进行低噪声设计,采用低噪声的数据采集卡,并选择合适的互功率谱估计算法,实现MHD角速度传感器噪声的测量。
2.2 MHD角速度传感器噪声测量系统设计
噪声系数是用来衡量前置放大电路噪声性能好坏的最常用的指标,其表示一个有内部噪声源的放大电路信号传递时的信噪比恶化程度,对于图2所示MHD角速度传感器等效噪声模型,前置放大电路的噪声系数为:
(8)
式中:En和In分别是前置放大电路等效输入电压噪声功率谱密度和电流噪声功率谱密度,ν为En和In的相关系数,实际计算中可取为0。式(8)对Rs求导,令∂F/∂Rs=0,得到最佳源电阻为:
(9)
当信号源电阻Rs与最佳源电阻相等时,该放大电路达到最小噪声系数Fmin为:
(10)
也就是说前置放大电路具有了最好的噪声性能。
在MHD角速度传感器工作频率范围1 Hz~1 kHz 内,大多数低噪声运放的最佳源电阻约为几千欧姆,远大于传感器的等效电阻,MHD角速度传感器无法以直接耦合的方式与放大电路实现噪声匹配,因此图3中每个前置放大通路均由噪声匹配变压器和前置放大电路组成,匹配的准则为[26]:
n2Rs=Rso
(11)

与变压器级联的前置放大电路如图4所示,第一级的同相放大电路所用运放为OP27,按式(9)计算其最佳源电阻的典型值为2 kΩ~7.5 kΩ[27],等效到SR554输入端的最佳源电阻为0.2 Ω~0.75 Ω,基本上实现了与MHD角速度传感器的噪声匹配。此外,电路还要有足够的增益和带宽,并使用交流耦合电路,利用积分反馈结构,使放大电路具有良好的输出动态范围。单端转差分电路使得信号以差分模式输出,提高输出信号的抗共模干扰能力。

图4 前置放大电路
双通路前置放大通路输出放大后的噪声信号由NI USB6366数据采集卡同步采集,并传输至上位机,在MATLAB中采用平均周期图法计算互功率谱。噪声测量中MHD角速度传感器、SR554、前置放大电路及USB6366均施加了屏蔽。前置放大电路选用锂电池及低噪声稳压通路单独供电,防止外部环境噪声由电源路径传导至噪声测量系统,保证噪声测量的精度[28]。此外,系统所有屏蔽线直接接至信号源的低电位,减少噪声电流,消除纵向干扰。同时,所有的传输线使用同轴电缆,并且要求传输线尽可能短,抑制传输过程中耦合到系统中的共模噪声[29]。
3 MHD角速度传感器噪声测量系统的噪声特性
3.1 测量系统的固有噪声


图5 前置放大电路等效输入噪声仿真结果

图6 前置放大电路等效输入电压噪声谱密度测量结果
为了验证TINA噪声模型仿真结果的准确性,对上述放大电路的静态噪声水平进行实验测试。将低噪声放大电路的输入端短接,输出连接到USB6366采集信号,采样频率为80 kHz,采样时间为100 s。采样信号传输至上位机,使用平均周期图算法计算放大电路的等效输入电压噪声谱密度。测量结果如图6所示,在MHD角速度传感器工作范围内,测量值与图5(a)所示仿真结果基本一致。需要说明的是,测量结果包含了USB6366的噪声EDAQ的影响,其等效到前置放大电路输入端为EDAQ/KAMP,由于前置放大电路增益KAMP=20 000,因此EDAQ/KAMP远小于前置放大电路的等效输入噪声,图6所示测量结果可认为即前置放大电路的噪声。

(12)


图7 测量系统输入电压噪声测量结果与仿真结果
3.2 测量系统的极限灵敏度
当测量系统用来提取MHD角速度传感器输出信号时,用极限灵敏度[26]来表示可以检测到的传感器最小输出信号:
(13)
式中:m为输出端检测信号时所需的最低信噪比,Δfn为测量系统的噪声带宽。若m取100,Δfn取10 kHz,Rs取0.5 Ω,由SR554的数据手册可知NF约为6 dB,则该测量系统可以检测到的MHD角速度传感器最小输出信号Emin约等于0.18 μV。
将本文设计的变压器耦合的测量方法与文献[20]设计的与传感器直接耦合的测量方法进行对比,结果如表1所示。变压器耦合可以有效改善等效输入电压噪声指标,噪声系数显著降低,提升了系统的极限灵敏度。
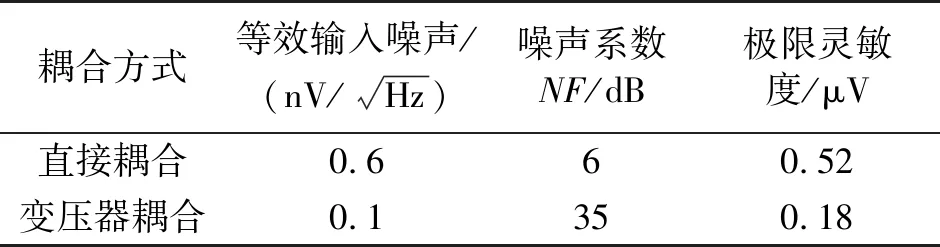
表1 不同耦合方式的测量系统噪声性能
4 MHD角速度传感器噪声的测量


图8 MHD角速度传感器内阻测量结果

图9 MHD角速度传感器噪声序列的时域和统计学表示
在测量MHD角速度传感器的噪声时,将传感器同时接入上述双通路噪声测量系统,USB6366采集的是经过SR554和前置放大电路放大的传感器噪声电压信号。设置前置放大电路的噪声带宽为10 kHz,根据奈奎斯特采样定理,采样频率设置为80 kHz,采样时间设为100 s,以保证足够的序列长度。图9为MHD角速度传感器噪声放大后的时域采样序列,计算噪声序列的概率密度函数近似为高斯分布。大量噪声离散采样值的标准差可以表示系统输出的RMS噪声[30],根据概率分布函数的3σ准则,通路1和通路2的实测噪声标准差σ分别为0.022 V和0.026 V,两通路输出噪声的峰峰值分别为±0.066 V和±0.078 V。为了研究MHD角速度传感器的噪声特性,需要对实测的噪声序列进行频域分析,以获得更多的噪声信息。
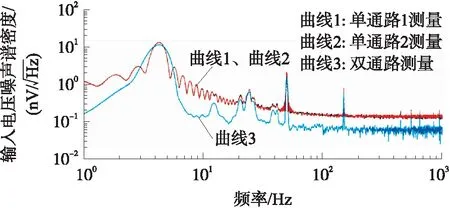
图10 MHD角速度传感器等效输入电压噪声谱密度测量结果
对曲线3所示的传感器电压噪声谱密度求平方,即传感器的噪声功率谱密度,在10 Hz~1 000 Hz范围内积分,可以将电压噪声谱密度转换为MHD角速度传感器的RMS噪声值ERMS。如表2,重复十次测量,得到MHD角速度传感器的ERMS值。

表2 MHD角速度传感器的RMS噪声(nVRMS)
表2中MHD角速度传感器的RMS噪声测量值具有一定重复性,本文所设计的MHD角速度传感器的噪声测量系统可以满足测量精度和稳定性的要求。
5 结论
猜你喜欢
中国生殖健康(2020年5期)2021-01-18
教书育人(2020年11期)2020-11-26
当代陕西(2020年13期)2020-08-24
微型电脑应用(2019年4期)2019-04-26
中国生殖健康(2018年5期)2018-11-06
中学生数理化·高一版(2017年3期)2017-07-08
计算机应用与软件(2017年3期)2017-04-14
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
哈尔滨商业大学学报(自然科学版)(2015年4期)2015-03-09