无人机果树施药旋翼下洗气流场分布特征研究
2019-11-08 01:07:20祁力钧吴亚垒程浈浈刘婠婠ElizabethMusiu杨泽鹏
农业工程学报 2019年18期
张 豪,祁力钧,吴亚垒,程浈浈,刘婠婠,Elizabeth Musiu,肖 雨,杨泽鹏
无人机果树施药旋翼下洗气流场分布特征研究
张 豪,祁力钧※,吴亚垒,程浈浈,刘婠婠,Elizabeth Musiu,肖 雨,杨泽鹏
(中国农业大学工学院,北京 100083)
植保无人机悬停果树施药时的旋翼下洗气流场分布对雾滴空间运动和在冠层内部的附着、穿透有重要影响。该文基于计算流体动力学(computational fluid dynamic,CFD)方法,结合RNG κ–ε湍流模型、多孔介质模型和滑移网格技术,通过构建虚拟果园,对六旋翼植保无人机悬停果树施药时的下洗气流流场进行数值模拟,分析在无人机不同悬停高度、不同果树生长阶段和不同自然风速下的气流场分布特征,并进行标记点下洗气流速度测试试验。研究结果表明:1)自然风速大于3 m/s时,旋翼下洗气流速度已淹没于环境自然风速中,不再满足植保无人机悬停施药作业条件;2)自然风破坏了旋翼下洗气流的中心对称状态,向下风方向出现后扬,且随着自然风速和悬停高度的增大,后扬距离随之增大;3)与无自然风状态比较,果树生长时期对其喷头处速度分布影响不显著,主要受自然风影响,且竖直向下的向气流占主体地位,对雾滴的对靶运输起主导作用,应将喷头安装于可使雾滴获得较大向速度的旋翼正下方0.2 m处附近;4)无人机悬停位置沿逆风方向调整后,冠层内部上、中、下层气流平均速度较调整前分别由1.36、0.80、0.81 m/s增大至3.04、2.37、1.63 m/s;上、下层速度分布变异系数分别由74.26%、35.80%降至45.39%和22.70%,中层略有增大,总体利于实现对靶喷雾。试验结果表明,标记点下洗气流速度测量值和模拟值之间具有较好的一致性。该文可为动态环境条件下植保无人机悬停果树施药的对靶喷雾自适应控制技术研究提供参考。
无人机;农药;模型;下洗气流;果树冠层;多孔介质
0 引 言
农业航空精准施药技术是减少农药残留、提高农药效益及降低农药对环境负面影响的有效手段[1]。作为现代农业的重要组成部分,农业航空植保具有效率高、成本低、作业不受地形条件和作物长势限制等优势[2–6]。但在旋翼植保无人机悬停状态下进行果树施药时,果树冠层对旋翼下洗气流的影响不可忽略[7],且旋翼下洗气流裹挟雾滴运动,影响雾滴的空间运动及在冠层内部的附着和穿透。为研究旋翼下洗气流与作物冠层之间的互作关系[8],有必要明确果树冠层参与下的旋翼下洗气流场分布特征。
目前,围绕旋翼植保无人机作业参数对雾滴飘移[9-10]、沉积[11-12]和喷幅[13-14]的影响已有较多研究。另外,Bruno等[15-16]利用无人机接受无线传感器网络(wireless sensor networks,WSNs)的回传信息,实现无人机航线在动态环境中自主调整,达到精准对靶施药的目的。而在旋翼下洗气流方面,Ramasamy等[17]、Wall等[18]采用粒子图像测速(particle image velocimetry,PIV)方法对翼尖涡流形态特征进行了研究;Yeo等[19]建立了旋翼无人机下洗气流的经验模型,并用3种机型对模型可靠性进行了评估;汪沛等[20]、胡炼等[21]、李继宇等[22]采用风场测量系统分别针对不同型号植保无人机旋翼下洗气流进行田间测量,通过分析采集的风速数据得到风场分布规律,但都未能直观反映出作物冠层参与下的旋翼下洗气流三维形态。陈盛德等[23]则用该系统测得四旋翼无人机下洗气流分布情况,研究了不同方向风速对雾滴沉积分布的影响;Yang等[24-25]采用计算流体动力学(computational fluid dynamic,CFD)方法,对六旋翼植保无人机的空载悬停下洗气流进行数值模拟,揭示了无冠层的旋翼下洗气流分布规律,并在载荷3 kg数值求解的下洗气流场中添加雾滴离散相,初步研究了旋翼下洗气流与雾滴运动的内在联系;文晟等[26]采用格子玻尔兹曼方法(lattice-boltzman method,LBM)对单旋翼植保无人机旋翼流场进行数值求解,探寻了不同飞行速度下翼尖涡流对雾滴飘移的影响规律。数值模拟过程中对果树冠层的处理方法有2种:一是创建完整的3D果树模型(包括树干、树枝及树叶等);二是用多孔介质代替冠层[27]。前者需要较大计算机资源,不宜开展数值模拟研究,后者在果园风送式喷雾机数值模拟方面已有较多成熟研究,如Endalew等[28-30]、Hong等[31-32]、Duga等[33-34]、Salcedo等[35-36]在模拟过程中引入多孔介质模型处理果树冠层,广泛开展有冠层参与下的喷雾机气流场和雾滴分布规律研究。Hong等[37]将果树冠层用多孔介质代替进行CFD模拟,利用雾滴飘移模拟数据开发了风送式喷雾机模拟(simulation of air–assisted sprayers,SAAS)应用软件,该软件可根据用户输入条件对喷雾机雾滴飘移做出预测。虽然植物冠层内气流的不均匀和湍流性质、冠层叶面积密度参数误差及考虑雾滴时气流和靶标冠层之间相互作用建模困难等因素,限制了采用多孔介质代替冠层后的预测精度[27]。但上述研究已充分证明利用多孔介质模型处理果树冠层,进行作物冠层参与下的气流场数值模拟研究是准确可行的。总的来看,基于多孔介质模型对果树冠层参与下的旋翼下洗气流场分布特征的研究报道较少。
为明晰多旋翼植保无人机悬停果树施药时的气流场分布特征,本文通过构建虚拟果园,采用多孔介质模型处理果树冠层,基于商用软件ANSYS Fluent16.0对六旋翼植保无人机悬停果树施药气流场进行数值模拟。分析不同悬停高度、不同果树生长阶段和不同自然风速下的互作流场分布特征,并搭建试验平台开展标记点下洗气流速度验证试验。
1 物理模型
六旋翼植保无人机定制于深圳市金铭睿电子有限公司(图1),因初步只对旋翼下洗气流进行研究,所以该植保无人机未设计喷雾系统。无刷电机由外接电源提供动力,旋翼转速由无线遥控器进行调控,另外加装有RC41转速测量仪,反馈旋翼转速用于数值模拟,连接杆用于将无人机悬挂固定于支架上。无人机基本参数为:轴距0.8 m,旋翼型号1 555,无刷电机型号X4114 KV370,最大载药量5 kg。

1.转速测量仪 2.连接杆 3.无刷电机 4.旋翼
植保无人机旋翼是核心旋转部件,其外表面为复杂曲面,直接进行正向精准建模比较困难,且六旋翼植保无人机的正、反旋翼相间分布,需分别对二者进行建模。为获得精确旋翼三维模型用于数值模拟,本文采用MCS五四轴全自动三维扫描系统分别对正、反旋翼进行扫描,获取了旋翼表面点云数据,而后采用Geomagic Studio软件对点云数据进行后处理,实现旋翼模型的逆向重建,得到精确的旋翼三维模型(图2)。

1.旋翼托架 2.三维扫描仪 3.旋翼 4.旋转托盘 5.点云数据 6.计算机 7.旋翼重构模型
数值模拟过程中将无人机模型进行合理简化,忽略无人机起落架、机臂及喷雾系统等其他部件影响,只考虑各旋翼的存在,以使计算机资源与数值求解准确性达到平衡。喷雾系统的忽略可能对原药箱所在处的气流场造成影响,但旋翼距药箱的水平距离一般较远,不影响气流的向下发展,且已有研究发现这种简化对旋翼下洗气流的整体发展演变影响不大[24],简化后模型可用于旋翼气流场的数值模拟研究。简化后模型如图3所示,定义坐标系轴正方向为无人机下降方向,旋翼1、3、5为反旋翼(逆时针旋转),旋翼2、4、6为正旋翼(顺时针旋转),平面与6个旋翼所在平面重合,坐标系原点位于6个旋翼旋转轴所在圆的圆心处。

图3 无人机简化模型
2 数值模拟
2.1 主控方程与湍流模型
纳维-斯托克斯(Navier-Stokes,N-S)方程是描述流体运动的控制方程,但运用三维非定常N-S方程对旋翼下洗气流进行直接数值求解尚难以实现。应用雷诺平均法在N-S方程中引入湍流模型将方程组(RANS方程)封闭求解,计算量小,更适用于工程数值计算[38],在旋转坐标系下以绝对速度为变量的主控方程具体形式可表示为[39]


式中、分别为控制体边界面上的对流通量和黏性通量;为状态变量;为流体的密度,kg/m3;、、分别表示速度矢量在3个坐标方向(、、)上的分量,m/s;为单位体积的总能量;W为控制体的体积,m3;为控制体边界法向面;为旋转角速度矢量,rad/s;为、、的矢量和;为边界的外法向3个分量(、、)的矢量和,m/s;W为边界面上网格运动速度,m/s;为压力,Pa;为时间,s;为黏性剪切应力张量项(为取、、时的组合);为热传导项。
本文选择RNG-湍流模型对主控方程进行封闭。该模型对湍动黏度进行了修正,并且考虑了平均流动中的旋转及旋流流动情况[40],具体执行公式为



式中为湍动能,m2/s2;为湍动耗散率,m2/s3;为有效黏度,Pa×s;为流体动力黏度,Pa×s;u和u为速度分量时均值,m/s;G为由于平均速度梯度引起的湍动能的产生项,m2/s2;1和2为模型常数,1=1.42,2=1.68;和分别为和的有效湍流Prandtl数的倒数,==1.39;为平均应变率;、0、、均为默认常数。
2.2 冠层多孔介质模型
果树冠层的阻力作用会造成气流动量损失,本文在总结前人研究成果[27-37]基础上选择多孔介质模型处理果树冠层,将冠层所在区域用多孔介质代替,通过在多孔介质区域中增加动量损失源项来模拟冠层对气流的阻力作用。动量、湍动能和湍动耗散率方程的附加源项可描述为[31]




已知冠层压力损失系数和叶面积密度之间的关系为C=2CL,可通过定义不同压力损失系数表征冠层疏密程度。基本假设有:多孔介质为各向同性;多孔介质流动阻力忽略黏性项影响,只保留惯性损失项。
2.3 计算区域与边界条件
由于针对旋翼下洗气流进行田间试验研究不仅耗时费力、精确测量设备成本高,而且自然风速等试验条件极不可控,因此,本文通过构建虚拟果园,对六旋翼植保无人机悬停果树施药时的气流场进行数值模拟研究。构建的虚拟果园(图4)长20.0 m,宽18.0 m,行间距和株间距分别被设定为3.0和2.0 m。果树模型被简化为球形冠层和圆柱树干的组合[31]。考虑标准化果园里果树结构已生长完全,且冠层常年被修剪为固定大小形状,所以对不同生长阶段(发芽期、半叶期和全叶期)的果树只考虑冠层压力损失系数的变化,不考虑结构尺寸的变化。结构尺寸由测量实验室内的试验果树尺寸得到。如图5所示,果树冠层球直径为1.2 m,树高1.9 m,圆柱树干直径为0.15 m。果树发芽期、半叶期和全叶期的叶面积密度分别为1.6、3.0、8.0 m–1,对应冠层压力损失系数分别为0.8、1.5、4.0[32]。若对整个果园进行模拟,需较高计算机资源,求解耗费时间长。为提高计算效率,在不影响旋翼下洗气流充分发展扩散的前提下,选择虚拟果园的一部分作为数值求解计算区域。
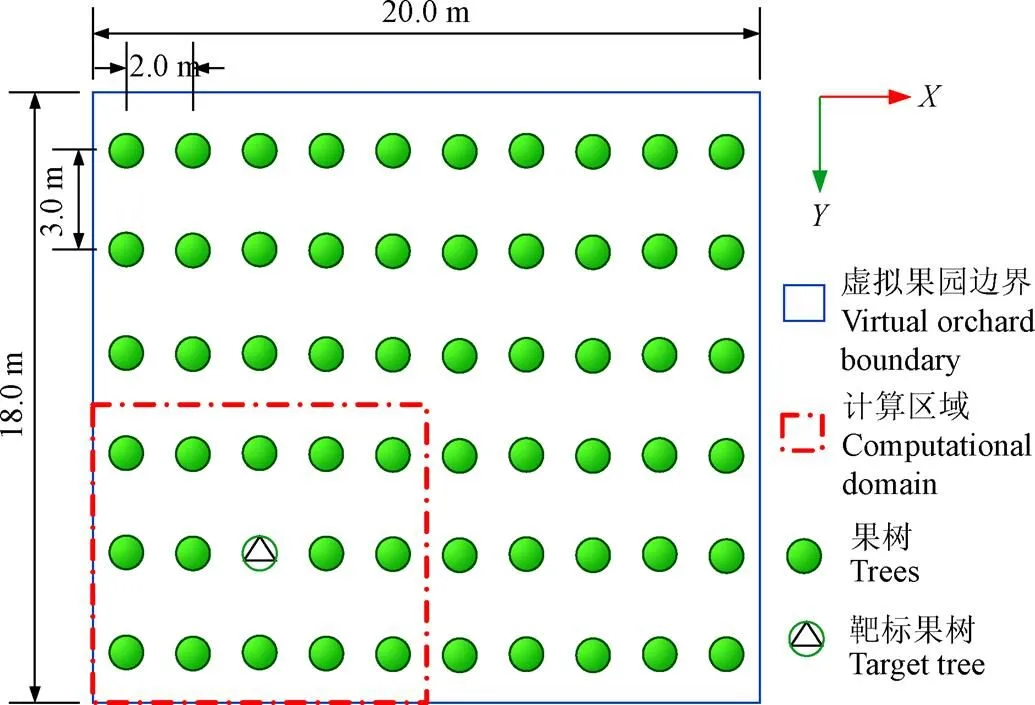
图4 虚拟果园示意图

图5 果树模型参数
如图6所示,计算区域长10 m,宽9 m,考虑本文无人机最高悬停高度为4 m,计算区域高度设定为6 m,植保无人机悬停于靶标果树正上方进行悬停施药作业。包含无人机旋翼的6个旋转子域、果树的15个冠层子域和15个树干子域、1个空气子域。利用滑移网格技术处理旋翼的旋转(3 000 r/min),在旋转子域和空气子域交界面处采用动态搭接面边界条件;由于树干子域不需求解,在前处理过程中采用布尔差运算将其从计算区域中除去,只保留树干外边界,设置为壁面边界。沿轴正方向,自左向右依次为自然风进口和出口,进口边界为速度入口,出口边界为压力出口,出口压力为0。地面设置为壁面边界,其余边界为对称边界。计算区域网格划分的质量好坏直接影响数值求解的准确性和计算效率,本文采用ANSYS Meshing中适用于复杂实体的非结构四面体网格对计算区域进行划分。通过控制旋翼壁面尺寸、旋转子域与冠层子域边界面尺寸对该2个子域的网格进行加密,提高计算精度。划分后计算区域网格节点总数约192万,网格单元总数约1 032万。对于四面体网格,可采用偏斜率(Skewness)衡量网格质量,查看偏斜率最大值为0.85,平均值为0.23,符合四面体网格最大偏斜率应低于0.95,平均偏斜率应低于0.33的要求[32],可用于数值模拟。

图6 计算区域示意图
2.4 计算方法
基于有限体积法将控制方程离散化求解瞬态气流场,压力–速度耦合采用适用于非定常计算并对压力进行2次修正的PISO算法,空间域上选择二阶迎风离散格式对动量、湍动能和湍动耗散率进行离散,用该离散格式对非结构四面体网格进行求解可达到较高求解精度,时间域上选择一阶隐式离散格式,压力插值格式选择适合高速旋流及多孔介质的PRESTO!格式[34]。
3 模拟结果与分析
3.1 旋翼下洗气流场分布特征
为明晰多旋翼植保无人机悬停果树施药时气流场的分布情况,首先选取无人机悬停高度为3 m,自然风速为0 m/s情况下的数值模拟结果进行分析。由图7可知,在不考虑自然风的情况下,该结果与单一果树的研究结果一致[7],具体表现为靶标果树冠层周围气流从冠层上半部区域开始呈“圆锥形”向下发展,以一倾斜角发展到地面之后形成地面铺展,并且随着果树叶面积密度增大,冠层对旋翼下洗气流向四周的扩散作用增强。该扩散作用将增加靶标果树冠层周围雾滴的横向飘移,最终造成雾滴的地面无效沉积,不利于无人机悬停对靶精准喷雾。

图7 各时期XOZ截面总速度分布云图
植保无人机进行田间施药作业,喷雾质量受喷洒系统、农药理化特性及自然风等诸多因素影响[5],其中自然风是造成雾滴发生远距离飘移的主要原因之一。为研究自然风动态环境条件下多旋翼植保无人机悬停果树施药时气流场的具体形态,以果树半叶期为例,对不同自然风速下的气流场进行数值模拟。图8给出了无人机悬停高度为3 m,自然风速为1~5 m/s状态下的总速度三维分布云图,三维形态代表涡的分布情况,颜色代表总速度分布情况。从图8知,当自然风(指向轴正向)存在时,旋翼下洗气流不再是竖直向下发展,而是在自然风的作用下向下风方向出现后扬。此时,旋翼下洗气流已不能将靶标果树冠层完全包裹。随着自然风速的增大,旋翼下洗气流后扬距离随之增大,这将增加雾滴沿下风方向的飘移距离,也将造成靶标果树的漏喷以及相邻已喷果树的重喷。当自然风速小于等于3 m/s时,仍可观察到部分后扬的旋翼下洗气流发展至地面,且有完整的涡分布。但随着自然风速的增大,旋翼气流场涡形态的三维分布被破坏。当自然风速大于3 m/s时,旋翼下洗气流速度已淹没于环境自然风速中,此时已不再适宜开展施药作业,且无人机飞行安全也将受到威胁。

图8 不同自然风速状态下总速度三维分布云图(半叶期)
为观察自然风对近地面旋翼下洗气流的影响,图9给出了果树半叶期,无人机悬停高度为3 m,自然风速为1~5 m/s状态下的截面总速度分布云图。无自然风时,旋翼下洗气流发展至地面形成对称的地面铺展(图7),当自然风存在时,其不再呈对称分布状态(图9)。自然风上行侧近地面铺展气流被削弱,同时被逆向近地面自然风吹起,在自然风来流与上行侧地面铺展气流的共同作用下形成了较大顺时针卷扬气流,而自然风下行侧的近地面铺展气流则被加强(图9)。当自然风速较小时,近地面卷扬气流只出现在地面铺展气流末端(图9a)。当自然风速增大到2 m/s时,卷扬气流被向前推至靶标果树上行侧边缘,且卷扬强度增大,该卷扬气流增大了靶标果树上行侧气流的湍流程度(图9b)。当自然风速大于等于3 m/s时,已不再出现上行侧地面铺展气流,旋翼下洗气流随自然风向下行侧发展,且上述卷扬现象消失。

图9 不同自然风速状态下XOZ截面总速度分布云图(半叶期)
3.2 气流后扬距离因素分析
为探究自然风和无人机悬停高度对旋翼下洗气流后扬距离的影响,以果树全叶期为例,进行2个案例的数值模拟。案例1:悬停高度3 m,自然风速1 m/s、2 m/s、3 m/s;案例2:自然风速2 m/s,悬停高度2.5 m、3 m、3.5 m、4 m。因案例存在1组交叉组,故只需模拟6组。
对比图9和图10可知,有自然风时,全叶期和半叶期的旋翼下洗气流后扬形态基本相同。悬停高度3 m状态下,自然风速1和2 m/s时旋翼下洗气流后扬距离分别达到1和2 m;自然风速为3 m/s时,后扬距离已超过2 m,气流拍打到下行侧相邻果树冠层(图10);其中,自然风速为1 m/s时,对比图9a和图10a可知,在自然风下行侧的靶标果树冠层下部气流形态存在不同,这是因为全叶期果树冠层叶面积密度较半叶期大,导致气流动量损失也较大。该现象在图11a中更为明显。自然风速2 m/s状态下,悬停高度2.5 m、3 m和3.5 m时旋翼下洗气流后扬距离相差不大,都为2 m。但悬停高度为2.5 m时,到靶气流速度最大达8.4 m/s,易对枝叶造成损伤且不利于雾滴在冠层顶端叶面上的沉积;悬停高度3 m和3.5 m时,前者与靶标果树冠层存在接触,后者并不接触,这是因为悬停高度越高,旋翼下洗气流到达冠层高度时的气流速度越小,抵抗自然风来流能力变弱,更易被自然风吹向下行侧,后扬旋翼下洗气流变得更细长;悬停高度4 m时,后扬距离已超过2 m(图11)。

图10 不同自然风速状态下XOZ截面总速度分布云图(全叶期)

图11 不同高度状态下XOZ截面总速度分布云图(全叶期)
综合比较,悬停高度为3 m(距离冠层高度在1 m左右)时开展植保无人机悬停果树施药作业效果更好。另外,考虑到在自然风动态环境条件下存在旋翼下洗气流后扬现象,可根据自然风速的大小对植保无人机悬停位置向逆风方向做出适当调整,以适应旋翼下洗气流包裹靶标果树冠层,迫使雾滴尽可能多的到达冠层,从而实现精准对靶喷雾。
3.3 喷头处气流速度分布
为进一步研究旋翼下洗气流后扬情况下喷头不同安装距离范围内气流的速度分布,针对植保无人机悬停高度3 m、自然风速0~2 m/s状态下进行施药作业时,在旋翼2、旋翼3、旋翼5和旋翼6的正下方安装喷头,并分别放置速度检测线。检测线按旋翼编号命名。考虑无刷电机和喷头固定装置需要一定距离及喷头安装不可能无限制靠下,选择旋翼正下方=0.1~0.6 m范围进行分析。
分析果树各时期不同自然风速状态下检测线L2、L3、L5和L6的、、方向速度可知,同一自然风速状态下,不同时期(发芽期、半叶期和全叶期)的速度变化趋势基本一致,表明果树生长时期对同一自然风速下的检测线各方向速度分布无显著影响。而在同一时期,不同自然风速状态下检测线的、、方向速度发生变化,以下行侧检测线L2、L3的向速度变化最为明显,表明检测线各方向速度变化主要受自然风影响。
以果树发芽期为例,从图12知,自然风速为0 m/s时,4条检测线的、、方向速度变化趋势基本相同,表明各检测线处气流速度分布较为一致,呈中心对称状态,且向速度较、向速度大,说明向(竖直向下)气流占主体地位,这与已有研究结论一致[24]。表明向气流将对雾滴的对靶运输起主导作用,最大向速度近9 m/s。当存在自然风时,由于气流出现后扬,造成检测线L2、L3与检测线L5、L6的向速度变化趋势不同。L2、L3的向速度与无自然风时较为一致,而L5、L6的向速度同步减小。与自然风速1 m/s时比较,自然风速为2 m/s时L5、L6的向速度衰减更快。随着自然风速的增大,各检测线向速度值均逐渐呈现正值,表明自然风的存在破坏了旋翼下洗气流的中心对称状态,旋翼下洗气流向下行侧的分速度增大,这将迫使雾滴向下行侧运动,造成靶标果树冠层上行侧与下行侧的雾滴沉积分布不均匀。但由于自然风为单一风向,、、方向速度仍以截面为对称面呈对称分布。综合比较,各状态下检测线L2、L3的最大向速度分布在旋翼正下放0.2~0.3 m区域内,当安装距离超过0.2 m时,L5、L6的向速度减小明显,为使各喷头雾滴均获得较大向速度,应将喷头安装于旋翼正下方0.2 m附近。

注:“La-Vb”表示检测线La的b方向速度(a取2、3、5或6;b取x、y或z)
3.4 靶标果树冠层气流速度分布
图13为无人机悬停高度3 m,自然风速0~2 m/s状态下到靶气流总速度分布云图。从图13知,无自然风时,旋翼下洗气流以中心对称形态到达冠层表面,对冠层实现包裹,且存在6个均布的高速区。该到靶特征有助于对靶喷雾的实现,可将雾滴均匀的吹送至冠层内部。由于自然风的存在,到靶气流不再呈中心对称形态,风速越大,到靶区域越偏向下行侧,且到靶区域面积越小,这将显著降低雾滴到达冠层的几率。
从图14知,无自然风时,冠层内部气流速度呈对称分布且相对较为均匀,该分布状态有助于雾滴在冠层内部的均匀扩散。自然风的存在,造成冠层内部气流向下行侧出现偏斜,且随着风速的增大气流偏斜越严重,该不均匀分布状态将造成冠层内部雾滴的不均匀分布,呈现为冠层下行侧沉积相对较多的趋势。

图13 不同自然风速状态下到靶气流总速度分布云图(全叶期)

图14 不同自然风速状态下冠层内XOZ截面总速度分布云图(全叶期)
为进一步探究自然风动态环境条件下,调整无人机悬停位置对实现对靶喷雾的效果,将图13c无人机悬停的水平位置沿逆风方向调整1 m,模拟结果见图15。从图15知,调整后旋翼下洗气流从冠层上行侧开始对冠层实现包裹,且到靶区域面积、冠层内部气流分布范围及气流速度大小较调整前均有所增大,这将有助于雾滴向冠层下行侧穿透,增加靶标果树冠层内部的有效沉积,降低空中飘移和地面无效沉积。
为量化比较无人机调整前后靶标果树冠层内部速度分布的均匀性,将冠层分为上(=1.4 m)、中(=1.7 m)、下(=2.0 m)3层,在各层分别均匀取9个样本点,以速度分布变异系数作为评价指标,计算公式为[41]



由表1知,调整前冠层内部上、中、下层的平均速度分别为1.36、0.80和0.81 m/s,调整后冠层内部上、中、下层的平均速度分别为3.04、2.37和1.63 m/s,较调整前增大明显,这有助于气流携带雾滴进入冠层内部,且有助于树叶的翻动,促使叶片背面附着雾滴。调整前后冠层内部上、中、下层的速度分布变异系数发生变化。上层速度分布变异系数显著降低,从74.26%变为45.39%;中层从17.50%增大至28.69%,此处气流速度的不均匀程度虽有增大,但相比于调整前中层气流平均速度很小,在冠层内部达不到运输雾滴的效果,调整后中层的平均速度增大明显,反而有助于运输雾滴;下层速度分布变异系数从35.80%降至22.70%。

表1 无人机位置调整前后冠层内部各层速度分布对比
4 验证试验
为验证数值模拟的可靠性,于中国农业大学植保机械实验室搭建试验平台,将数值模拟所用物理模型六旋翼植保无人机固定于支架上,果树放置于无人机正下方,进行标记点向下洗气流速度测试试验,室内无自然风。在检测线L2、L3、L5和L6上各选取4个标记点(=0.2 m、=0.3 m、=0.4 m、=0.5 m),采用testo 405i热线式风速测量仪对标记点进行测量。风速仪在手机端配有Smart Probe APP,每2 s记录一次数据,通过蓝牙实现数据的无线传输及实时显示。调整旋翼转速至3 000 r/min,待旋翼下洗气流发展稳定后开始测量,各标记点持续测量30 s,导出数据,求脉动速度的平均值为标记点速度值。测量现场如图16所示,测量结果及相对误差见表2。

图16 气流速度测量现场

表2 标记点模拟值和测量值对比
以均方根误差(root mean square error, RMSE)和平均相对误差(average relative error)来比较测量值和模拟值,计算公式为[25]



由表2知,各标记点测量值和模拟值的相对误差均保持在10%以内,计算得到均方根误差和平均相对误差分别为0.48 m/s和6.24%,证明测量值和模拟值之间具有较好的一致性。某些标记点的相对误差接近10%,可能是因为实际测量过程中,不能完全保证风速仪的热线探头准确置于旋翼正下方与检测线重合,测量点位置存在一定偏差导致。
作为动态环境条件下无人机悬停果树施药对靶喷雾自适应控制技术的前期研究,本文尚未涉及雾滴离散相,自然风向仅为单一方向,且只对无自然风状态下的气流速度进行验证试验,研究仍存在不足。后续将以无人机果树施药田间作业环境为基础,增加雾滴因素开展进一步研究,为自适应控制技术的研究提供参考。
本文后续拟建立动态环境条件下雾滴飘移预测模型,开展动态环境条件下无人机悬停果树施药的对靶喷雾自适应控制技术研究。
5 结 论
1)多旋翼植保无人机悬停状态下进行果树施药,无自然风时,随果树叶面积密度增大,冠层对旋翼下洗气流向四周的扩散作用增强;自然风存在时,旋翼下洗气流中心对称状态被破坏,气流向下风方向出现后扬,且随自然风速和悬停高度的增大,气流后扬距离随之增大。各标记点下洗气流速度测量值和模拟值相对误差均在10%以内,均方根误差和平均相对误差分别为0.48 m/s和6.24%,测量值和模拟值之间具有较好的一致性。
2)当自然风速小于等于2 m/s时,靶标果树上行侧出现较大顺时针卷扬气流;当自然风速大于3 m/s时,旋翼下洗气流速度已淹没于环境自然风速中,不再适宜开展植保无人机悬停果树施药作业。
3)通过在喷头安装范围内布置速度检测线,分析表明,与无自然风状态相比,果树生长时期对喷头处气流速度的分布无显著影响,自然风影响较大。并且,竖直向下的向气流占主体地位,对雾滴的对靶运输起主导作用,应将喷头安装于可使雾滴获得较大向速度的旋翼正下方0.2 m处附近。
4)无人机悬停位置沿逆风方向调整后,旋翼下洗气流从靶标果树冠层上行侧开始对冠层实现包裹,且冠层内部上、中、下层气流平均速度较调整前增大明显。分别由1.36、0.80、0.81 m/s增大至3.04、2.37、1.63 m/s。上、下层速度分布变异系数分别由74.26%、35.80%降至45.39%和22.70%,中层略有增大,但总体利于实现对靶喷雾。
[1] Lan Yubin, Chen Shengde, Bradley K Fritz. Current status and future trends of precision agricultural aviation technologies[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(3): 1-17.
[2] 张东彦,兰玉彬,陈立平,等. 中国农业航空施药技术研究进展与展望[J]. 农业机械学报,2014,45(10):53-59.
Zhang Dongyan, Lan Yubin, Chen Liping, et al. Current status and future trends of agricultural aerial spraying technology in China[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 53-59. (in Chinese with English abstract)
[3] 周志艳,臧英,罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报,2013,29(24):1-10.
Zhou Zhiyan, Zang Ying, Luo Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 1-10. (in Chinese with English abstract)
[4] 薛新宇,兰玉彬. 美国农业航空技术现状和发展趋势分析[J]. 农业机械学报,2013,44(5):194-201.
Xue Xinyu, Lan Yubin. Agricultural aviation application in USA[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(5): 194-201. (in Chinese with English abstract)
[5] 周志艳,明锐,臧禹,等. 中国农业航空发展现状及对策建议[J]. 农业工程学报,2017,33(20):1-13.
Zhou Zhiyan, Ming Rui, Zang Yu, et al. Development status and countermeasures of agricultural aviation in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(20): 1-13. (in Chinese with English abstract)
[6] He Xiongkui, Bonds J, Herbst A, et al. Recent development of unmanned aerial vehicle for plant protection in East Asia[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(3): 18-30.
[7] 张豪,祁力钧,吴亚垒,等. 基于Porous模型的多旋翼植保无人机下洗气流分布研究[J]. 农业机械学报,2019,50(2):112-122.
Zhang Hao, Qi Lijun, Wu Yalei, et al. Spatio-temporal distribution of down–wash airflow for multi-rotor plant protection UAV based on porous model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(2): 112-122. (in Chinese with English abstract)
[8] 李继宇,兰玉彬,施叶茵. 旋翼无人机气流特征及大田施药作业研究进展[J]. 农业工程学报,2013,34(12):104-118.
Li Jiyu, Lan Yubin, Shi Yeyin. Research progress on airflow characteristics and field pesticide application system of rotary-wing UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 104-118. (in Chinese with English abstract)
[9] 张宋超,薛新宇,秦维彩,等. N-3型农用无人直升机航空施药飘移模拟与试验[J]. 农业工程学报,2015,31(3):87-93.
Zhang Songchao, Xue Xinyu, Qin Weicai, et al. Simulation and experimental verification of aerial spraying drift on N-3 unmanned spraying helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 87-93. (in Chinese with English abstract)
[10] 姚伟祥,兰玉彬,王娟,等. AS350B3e直升机航空喷施雾滴飘移分布特性[J]. 农业工程学报,2017,33(22):75-83.
Yao Weixiang, Lan Yubin, Wang Juan, et al. Droplet drift law of aerial spraying of AS350B3e helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(22): 75-83. (in Chinese with English abstract)
[11] 王昌陵,宋坚利,何雄奎,等. 植保无人机飞行参数对施药雾滴沉积分布特性的影响[J]. 农业工程学报,2017,33(23):109-116.
Wang Changling, Song Jianli, He Xiongkui, et al. Effect of flight parameters on distribution characteristics of pesticide spraying droplets deposition of plant–protection unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(23): 109-116. (in Chinese with English abstract)
[12] Kang T G, Lee C S, Choi D K, et al. Development of aerial application system attachable to unmanned helicopter: basic spraying characteristics for aerial application system[J]. Journal of Biosystems Engineering, 2010; 35(4): 215-223.
[13] 陈盛德,兰玉彬,李继宇,等. 植保无人机航空喷施作业有效喷幅的评定与试验[J]. 农业工程学报,2017,33(7):82-90.
Chen Shengde, Lan Yubin, Li Jiyu, et al. Evaluation and test of effective spraying width of aerial spraying on plant protection UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(7): 82-90. (in Chinese with English abstract)
[14] 杨知伦,葛鲁振,祁力钧,等. 植保无人机旋翼下洗气流对喷幅的影响研究[J]. 农业机械学报,2018,49(1):116-122.
Yang Zhilun, Ge Luzhen, Qi Lijun, et al. Influence of UAV rotor down-wash airflow on spray width[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(1): 116-122. (in Chinese with English abstract)
[15] Bruno S F, Freitas H, Gomes P H, et al. An adaptive approach for UAV-based pesticide spraying in dynamic environments[J]. Computers and Electronics in Agriculture, 2017, 138: 210-223.
[16] Bruno S. F, Pessin G, Filho G P R, et al. Fine-tuning of UAV control rules for spraying pesticides on crop fields: An approach for dynamic environments[J]. International Journal on Artificial Intelligence Tools, 2016, 25(1): 1-19.
[17] Ramasamy M, Lee T E, Leishman J G. Flow field of a rotating-wing micro air vehicle[J]. Journal of Aircraft, 2012, 44: 1236-1244.
[18] Wall B G, Richard H. Analysis methodology for 3C-PIV data of rotary wing vortices[J]. Experiments in Fluids, 2006, 40(5): 798-812.
[19] Yeo D, Shrestha E, Paley D A, et al. An empirical model of rotorcraft UAV downwash for disturbance localization and avoidance[C]//Kissimmee, Florida: AIAA Atmospheric Flight Mechanics Conference, 2015.
[20] 汪沛,胡炼,周志艳,等. 无人油动力直升机用于水稻制种辅助授粉的田间风场测量[J]. 农业工程学报,2013,29(3):54-61.
Wang Pei, Hu Lian, Zhou Zhiyan, et al. Wind field measurement for supplementary pollination in hybrid rice breeding using unmanned gasoline engine single-rotor helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(3): 54-61. (in Chinese with English abstract)
[21] 胡炼,周志艳,罗锡文,等. 无人直升机风场无线传感器网络测量系统设计与试验[J]. 农业机械学报,2014,45(5):221-226.
Hu Lian, Zhou Zhiyan, Luo Xiwen, et al. Development and experiment of a wireless wind speed sensor network measurement system for unmanned helicopter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(5): 221-226. (in Chinese with English abstract)
[22] 李继宇,周志艳,兰玉彬,等. 旋翼式无人机授粉作业冠层风场分布规律[J]. 农业工程学报,2015,31(3):77-86.
Li Jiyu, Zhou Zhiyan, Lan Yubin, et al. Distribution of. canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 77-86. (in Chinese with English abstract)
[23] 陈盛德,兰玉彬,Bradley K F,等. 多旋翼无人机旋翼下方风场对航空喷施雾滴沉积的影响[J]. 农业机械学报,2017,48(8):105-113.
Chen Shengde, Lan Yubin, Bradley K F, et al. Effect of wind field below rotor on distribution of aerial spraying droplet deposition by using multi–rotor UAV[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8): 105-113. (in Chinese with English abstract)
[24] Yang Fengbo, Xue Xinyu, Zhang Ling, et al. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(4): 41-53.
[25] 杨风波,薛新宇,蔡晨,等. 多旋翼植保无人飞机悬停下洗气流对雾滴运动规律的影响[J]. 农业工程学报,2018,34(2):64-73.
Yang Fengbo, Xue Xinyu, Cai Chen, et al. Effect of downwash airflow in hover on droplet motion law for multi-rotor unmanned plant protection machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(2): 64-73. (in Chinese with English abstract)
[26] 文晟,韩杰,兰玉彬,等. 单旋翼植保无人机翼尖涡流对雾滴飘移的影响[J]. 农业机械学报,2018,49(8):127-137,160.
Wen Sheng, Han Jie, Lan Yubin, et al. Influence of wing tip vortex on drift of single rotor plant protection unmanned aerial vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 127-137, 160. (in Chinese with English abstract)
[27] Endalew A M, Hertog M, Delele M A, et al. CFD modelling and wind tunnel validation of airflow through plant canopies using 3D canopy architecture[J]. International Journal of Heat and Fluid Flow, 2009, 30(2): 356-368.
[28] Endalew A M, Debaer C, Rutten N, et al. A new integrated CFD modelling approach towards air–assisted orchard spraying-Part I. Model development and effect of wind speed and direction on sprayer airflow[J]. Computers and Electronics in Agriculture, 2010, 71(2): 128-136.
[29] Endalew A M, Debaer C, Rutten N, et al. A new integrated CFD modelling approach towards air–assisted orchard spraying-Part II: Validation for different sprayer types[J]. Computers and Electronics in Agriculture, 2010, 71(2): 137-147.
[30] Endalew A M, Debaer C, Rutten N, et al. Modelling pesticide flow and deposition from air–assisted orchard spraying in orchards: A new integrated CFD approach[J]. Agricultural and Forest Meteorology, 2010, 150(10): 1383-1392.
[31] Hong S W, Zhao Lingying, Zhu Heping. CFD simulation of airflow inside tree canopies discharged from air-assisted sprayers[J]. Computers and Electronics in Agriculture, 2018, 149: 121-132.
[32] Hong S W, Zhao Lingying, Zhu Heping. CFD simulation of pesticide spray from air-assisted sprayers in an apple orchard: Tree deposition and off-target losses[J]. Atmospheric Environment, 2018, 175: 109-119.
[33] Duga A T, Dekeyser D, Ruysen K, et al. Numerical analysis of the effects of wind and sprayer type on spray distribution in different orchard training systems[J]. Boundary Layer Meteorology, 2015, 157(3): 1-19.
[34] Duga A T, Delele M A, Ruysen K, et al. Development and validation of a 3D CFD model of drift and its application to air-assisted orchard sprayers[J]. Biosystems Engineering, 2017, 154(2): 62-75.
[35] Salcedo R, Vallet A, Granell R, et al. Eulerian-Lagrangian model of the behaviour of droplets produced by an air–assisted sprayer in a citrus orchard[J]. Biosystems Engineering, 2017, 154(2): 76-91.
[36] Salcedo R, Granell R, Palau G, et al. Design and validation of a 2D CFD model of the airflow produced by an airblast sprayer during pesticide treatments of citrus[J]. Computers and Electronics in Agriculture, 2015, 116: 150-161.
[37] Hong S W, Zhao Lingying, Zhu Heping. SAAS, a computer program for estimating pesticide spray efficiency and drift of air–assisted pesticide applications[J]. Computers and Electronics in Agriculture, 2018, 155: 58-68.
[38] 李鹏飞,许敏仪,王飞飞. 精通CFD工程仿真与案例实战:FLUENT GAMBIT ICEM CFD Tecplot[M]. 北京:人民邮电出版社,2011:186-192.
[39] 肖中云. 旋翼流场数值模拟方法研究[D]. 绵阳:中国空气动力研究与发展中心,2007.
Xiao Zhongyun. Investigation of Computational Modeling Techniques for Rotor Flowfields[D]. Mianyang: China Aerodynamics Research and Development Center, 2007. (in Chinese with English abstract)
[40] 王福军. 计算流体动力学分析:CFD软件原理与应用[M]. 北京:清华大学出版社,2004.
[41] 程浈浈,祁力钧,吴亚垒,等. 矮化密植果园摇摆变量喷雾机参数响应面法优化[J]. 农业机械学报,2017,48(增刊):22-29.
Cheng Zhenzhen, Qi Lijun, Wu Yalei, et al. Parameter optimization on swing variable sprayer of orchard based on RSM[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(Supp.): 22-29. (in Chinese with English abstract)
Distribution characteristics of rotor downwash airflow field under spraying on orchard using unmanned aerial vehicle
Zhang Hao, Qi Lijun※, Wu Yalei, Cheng Zhenzhen, Liu Wanwan, Elizabeth Musiu, Xiao Yu, Yang Zepeng
(C,,100083,)
when the plant protection unmanned aerial vehicle (UAV) is used to spray pesticides on orchard, the distribution of rotor downwash airflow filed has significant influence on the spatial movement of the droplet and the adhesion and penetration of the droplet inside the canopy. Based on computational fluid dynamics (CFD) method, combined with RNG-turbulence model, porous model and sliding mesh technology, the rotor downwash airflow field of a six–rotor plant protection UAV in hover when spraying on orchard was simulated. The simulation was done in the constructed virtual orchard. The characteristics of the airflow field were analyzed in different hovering heights of the UAV, fruit growth stages and natural wind speeds. Verification experiments were carried out through measuring the downwash airflow velocity at marked points. The results showed that: 1) it no longer met the conditions for spraying of the plant protection UAV in hover when the natural wind speed was greater than 3 m/s due to the downwash airflow under the rotor submerged in the natural wind of the environment. 2) Natural wind destroyed the central symmetry of downwash airflow of the rotor, and airflow diffusion appeared along the downwind direction. With the increase of natural wind speed and hovering height, the backward lift distance increased. When the hovering height was 3 m, and the natural wind speed was 1 and 2 m/s, the trailing distance of the rotor under the airflow reached 1 and 2 m respectively; when the natural wind speed was 3 m/s, the trailing distance had been more than 2 m. Under the condition of natural wind speed of 2 m/s, and the hovering height was 3 and 3.5 m, the trailing distances of the rotor under the airflow were not much different, both were both 2 m, but the former was in contact with the target canopy layer, and the latter was not in contact; When the hovering height was 4 m, the trailing distance of airflow had exceeded 2 m. 3) Compared with the state of no natural wind, the velocity distribution at the nozzle was mainly affected by natural wind, but the effect of fruit growth stages was not significant. In addition, the vertical-direction airflow played a leading role in the target transport of the droplets. The spray head should be installed near 0.2 m directly below the rotor to make the droplets to have large–direction velocity. 4) After the hovering position of the UAV was adjusted in the upwind direction, the average velocity of the upper, middle and lower airflows in the canopy increased from 1.36, 0.80 m/s, and 0.81 to 3.04 m/s, 2.37 and 1.63 m/s, respectively. The coefficient of variation of velocity distribution in the upper and lower layers decreased from 74.26% and 35.80% to 45.39% and 22.70%, respectively, and the middle layer increased slightly, which was beneficial to achieve target spray. The experimental results showed that there was a good consistency between the experimental and simulated values of downwash airflow velocity at marked points. In conclusion, this paper should provide further reference for the development of the adaptive control technology of plant protection UAV hovering target spraying in a dynamic environment.
unmanned aerial vehicle; pesticide; models; downwash airflow; fruit tree canopy; porous model
张 豪,祁力钧,吴亚垒,程浈浈,刘婠婠,Elizabeth Musiu,肖 雨,杨泽鹏. 无人机果树施药旋翼下洗气流场分布特征研究[J]. 农业工程学报,2019,35(18):44-54.doi:10.11975/j.issn.1002-6819.2019.18.006 http://www.tcsae.org
Zhang Hao, Qi Lijun, Wu Yalei, Cheng Zhenzhen, Liu Wanwan, Elizabeth Musiu, Xiao Yu, Yang Zepeng. Distribution characteristics of rotor downwash airflow field under spraying on orchard using unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(18): 44-54. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.18.006 http://www.tcsae.org
2019-03-19
2019-08-09
科技部国家重点研发计划项目“现代果园智能化精细生产管理技术装备研发”(2017YFD0701400);科技部国家重点研发计划项目“地面与航空高工效施药技术及智能化装备(2016YFD0200700)”。
张 豪,博士生,主要从事植保机械研究。Email: zhanghao08@cau.edu.cn
祁力钧,博士,教授,主要从事植保机械研究。Email:qilijun@cau.edu.cn
10.11975/j.issn.1002-6819.2019.18.006
S49; S25
A
1002-6819(2019)-18-0044-11
猜你喜欢
中国农业信息(2022年1期)2022-05-25 13:31:46
农业机械学报(2021年11期)2021-12-07 05:36:44
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
时代汽车(2021年18期)2021-09-17 11:51:59
大气科学(2021年1期)2021-04-16 07:34:18
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电动工具(2020年6期)2020-12-29 05:53:36
设备管理与维修(2020年2期)2020-03-24 13:12:06
电子制作(2019年9期)2019-05-30 09:41:48
农业环境科学学报(2017年2期)2017-03-20 14:57:37