
气膜孔视觉测量中的坐标系建立与转换∗
2019-11-06 03:57刘孟晨
传感技术学报 2019年10期
毕 超,郝 雪,刘孟晨,刘 勇
(北京航空精密机械研究所精密制造技术航空科技重点实验室,北京100076)
在航空领域中,发动机是飞机推进系统的核心与关键组成部分,作为一种高速旋转的热力机械,它能够将燃料的化学能转变为热能,进而转化为机械能,从而为飞行提供所需的动力[1]。近年来,随着全新航空航天时代的到来,航空发动机日益向着具有更高性能的方向发展,导致涡轮前燃气温度进一步提高,甚至已经超过了涡轮叶片材料的耐温极限,这就使直接与高温高压燃气相接触并且处于燃气流包围之中的高压涡轮叶片等热端部件的工作环境非常恶劣。
因此,在制造高压涡轮叶片时,为了提高其承温能力以确保其在高温高压下的机械性能,必须对叶片采取有效的冷却措施。当前,气膜冷却技术由于具有高效的冷却特性,已经成为先进航空发动机高温部件的主要冷却手段之一[2]。所谓气膜冷却技术,即在叶片的叶身型面和缘板等部位设计大量的孔径微小、角度各异、分布不均的冷却气膜孔(以下简称“气膜孔”),并使冷却空气经由叶片内部的气体通道和这些气膜孔到达叶片表面,从而在叶片表面与燃气流之间形成一层冷却气膜,以阻隔高温高压燃气将热量传递给叶片,从而实现对叶片的冷却和保护[3]。具体说来,分布于高压涡轮叶片上的气膜孔,数量通常为几十到几百个,而且孔径非常小,大多处于Φ0.3 mm~Φ1.5 mm之间,而深径比则为1~3[4]。研究表明:气膜冷却效果是材料、几何参数及其耦合作用在高温高压三维非定常流场下的响应,与气膜孔的形状与位置参数息息相关[5],其中,气膜孔的分布位置决定了冷却气膜的横向覆盖宽度和纵向覆盖长度。因此,为了确保加工出的气膜孔符合涡轮叶片的设计要求,从而实现最佳的冷却效果,必须对气膜孔的实际几何技术状态实施监控。
为了解决气膜孔的分布位置等形位参数的高精高效检测难题,本文并基于视觉测量与多轴联动原理,设计并搭建出了非接触式的四轴视觉坐标测量系统,从而将三坐标测量机的移动范围大、定位精确和通用性强等优点与工业相机的非接触、信息丰富和应用灵活等优点结合在一起,并加入了回转台(第四轴),以充分应对批量气膜孔的制造质量检测与评价任务。在该测量系统中,为了将以像素为单位的图像数据最终转化为包含物理尺寸信息的实际测量数据,需要构建出合理的坐标系统并确立坐标系之间的转换关系,从而将不同视角和方位下的测量数据转换到相同的坐标系中,或者将多视角、多方位的测量数据进行拼合。陈凯云等提出了BLM001型叶片四坐标激光测量仪的准刚体数学建模方法,建立了基准坐标系、转台坐标系和叶片坐标系等,并确立了相应的齐次变换矩阵,实现了机构的误差补偿[6];黄风山等研究了智能三坐标测量机视觉系统的在线标定技术,通过引入测头坐标系建立了标定数学模型,实现了测量数据由摄像机坐标系到世界坐标系的转换,并且标定精度在±1 μm之内,满足了工程实际的使用要求[7-8];王磊等针对四轴非接触测量机中的转台坐标系因温度变化而引起的偏移问题,利用非接触测头测量标准棒轴线位置的偏移来得到转台轴线位置在XOY平面的变化量,从而实现了对测量结果进行XOY平面内的实时温度补偿,保证了测量结果的准确性[9]。
为了解决高压涡轮导向叶片上的气膜孔特征的分布位置检测难题,本文针对所搭建的非接触式四轴视觉坐标测量系统,开展了图像空间到叶片空间的坐标系建立与转换关系研究。在测量过程中,本文结合四轴运动系统与工业相机的特点,通过建立图像像素坐标系、图像物理坐标系、基准坐标系、回转台坐标系和叶片坐标系,并确立这些坐标系之间的相互转换关系,实现了将工业相机所采集到的图像数据转化成物理测量数据,并最终转换到叶片坐标系中,从而为后续与气膜孔的设计数据进行比对并做出评价奠定了坚实基础。

图1 高压涡轮导向叶片的结构特征
1 四轴视觉坐标测量系统
高压涡轮导向叶片是一种特殊的热端零件,主要由外缘板、叶身和内缘板等构成,而气膜孔大多分布于叶身型面和缘板等部位,如图1所示。加工后的气膜孔是否符合设计精度与质量控制的要求,需要由相应的检测设备对其实际状态进行评定[10]。近年来,随着测量技术的进步,多种形式的视觉测量手段被引入到了航空航天等领域中,极大地弥补了传统测量手段的局限。以工业相机为代表的视觉测量器件不仅具有非接触式测量方法的效率高、适应性强、机动灵活和实时性好等优点,还具有成本低、操作简便、可靠性高以及信息丰富等独特优点,因而被广泛应用于工业现场[11]。同时,三坐标测量机具有移动范围大、定位精确和通用性强等优点,可以作为工业相机的移动载体,通过三个直线轴的移动来实现工业相机的运动轨迹。因此,本文将工业相机作为前端传感器,并将其安装在三坐标测量机的Z轴末端,以搭建出新型的视觉坐标测量系统,从而将先进的视觉测量技术与传统的三坐标测量技术结合在一起以完成气膜孔测量数据的获取。将视觉信息引入到三坐标测量系统中,一方面充分利用了三坐标测量机的精确性和工业相机的柔性,降低成本,节省时间,并且缩短了产品周期;另一方面也使坐标测量更加自动化、智能化,极大地提升了坐标测量技术的发展前景和应用空间。
同时,根据高压涡轮导向叶片上气膜孔的分布特点与测量需求,单一方位的工业相机只能完成某一部分测量数据的获取,而要获取全部气膜孔的测量数据,还需要在三个直线运动轴的基础上增加一个回转运动轴(第四轴),即回转台。通过回转台的配合来对处于不同方位的气膜孔进行测量,从而实现全部气膜孔的检测,并且提高测量效率。在实际应用中,首先通过机械调整使回转台轴线与三坐标测量系统的Z轴相互平行,因而回转台每旋转到一个角度位置,被测零件上的这一部分测量数据只需要经过简单的平移、旋转等坐标变换就可以得到该数据在旋转之前的数值[12]。通过回转台的连续旋转,最终可以拼接出被测零件的全部测量数据。
基于以上分析,本文应用三坐标测量机、回转台、叶片专用夹具、工业相机和镜头等搭建了非接触式的四轴视觉坐标测量系统,如图2所示,从而将三坐标测量机的移动范围大、定位精确和通用性强等优点与工业相机的非接触、信息丰富和应用灵活等优点结合在一起,并且增加了回转台以用于被测叶片的转位,能够为实现气膜孔的空间位置等形位参数的非接触式测量提供依据,进而为解决气膜孔加工过程中的量值传递与溯源难题提供技术支撑。
在图2中,测量系统的运动机构由X、Y和Z三个直线轴和一个回转轴C构成。其中,X、Y和Z轴集成在一起,由三坐标测量机实现;而回转轴单独布置,由回转台实现;被测的高压涡轮导向叶片则通过叶片专用夹具固定在回转台上。工业相机安装在三坐标测量机框架的Z轴末端,因而可以沿着相互垂直的X、Y和Z轴进行单独运动或者联动,并且实现由X、Y和Z轴构成的直角坐标系内任意一点的精确定位。

图2 四轴视觉坐标测量系统的组成框图
2 坐标系的建立
在所搭建的四轴视觉坐标测量系统中,为了便于将以像素为单位的图像数据转化为包含物理尺寸信息的测量数据,并且将不同视角和方位的测量数据转换到同一个坐标系中,或者将多视角、多方位的测量数据进行拼合,本文建立了如图3所示的5个直角坐标系,通过这些坐标系之间的相互转换,可以实现测量数据的灵活处理。

图3 测量系统的5个直角坐标系
①图像像素坐标系op-ij,为平面直角坐标系,定义了工业相机的信号采集过程。该坐标系建立在图像平面上,以图像的左上角op为原点,并以像素(pixel)为单位,因而坐标(i,j)仅表示该像素在图像上的列数与行数,而不包含像素的空间位置信息。
②图像物理坐标系of-uv,为平面直角坐标系,也建立在图像平面上。该坐标系以工业相机的光轴与图像平面的交点(图像主点)of为原点,一般位于图像中心处,并以毫米(mm)为单位,坐标系中的u轴、v轴分别与图像像素坐标系中的i轴、j轴平行。
③基准坐标系O-XYZ,又称为绝对坐标系,为空间直角坐标系,以三坐标测量机的各轴光栅尺的绝对零位O为原点,其X、Y和Z轴的方向和尺度分别与三个直线运动轴相同,并且遵循右手定则[13]。
④回转台坐标系OR-XRYRZR,为空间直角坐标系,以回转台的回转中心OR为原点,并且固接在回转台上,随着回转台的旋转而旋转[14]。在回转台的回零位置处,XR、YR和ZR轴的方向分别与X、Y和Z轴平行,并且ZR轴与回转台轴线重合。
⑤叶片坐标系(工件坐标系)o-xyz,是叶片的设计坐标系,为空间直角坐标系,其原点o位于发动机轴线上,而且xoy平面为通过发动机轴线的水平面。x轴平行于平均弦线或者发动机轴线,并以叶片的排气边指向进气边为正方向;z轴垂直于发动机轴线,并以发动机半径增大的方向为正方向;而y轴及其正方向则依据右手定则由z轴与x轴来确定。
3 坐标系之间的转换
为了判断加工后的气膜孔是否符合设计要求,需要建立图像空间与叶片空间之间的坐标转换关系,从而将工业相机所采集到的图像数据转化为物理测量数据,并最终转换到叶片坐标系o-xyz中,这样才能与气膜孔的设计数据进行比对以做出评价。如图4所示,测量数据的坐标系转换过程为op-ij→of-uv→O-XYZ→OR-XRYRZR→o-xyz,具体过程如图4所示。
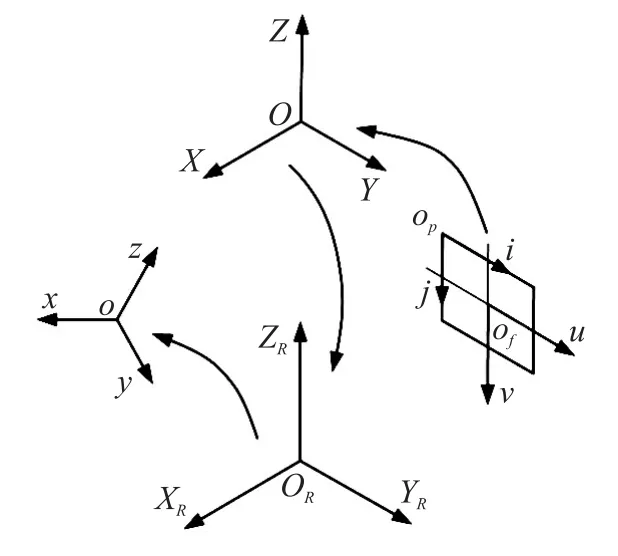
图4 坐标系转换过程
3.1 op-ij→of-uv
首先,将工业相机采集到的图像数据由图像像素坐标系op-ij转换到图像物理坐标系of-uv中,如图5所示。设of在op-ij坐标系中的坐标为(i0,j0),每个像素在u轴、v轴上所对应的物理尺寸(即像素尺寸当量)分别为 du、dv(单位:mm/pixel)。由于u轴和v轴分别与i轴和j轴平行,因而图像中的任意一个像素在of-uv与op-ij下的坐标有如下关系:

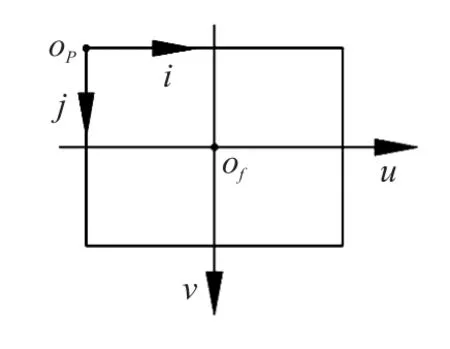
图5 op-ij与of-uv之间的转换关系
本文通过工业相机的内参数标定过程获取了du、dv和(i0,j0)的数值,分别为 1.15 μm/pixel、1.16 μm/pixel和(1 026,770)。 因此,按照上式即可将测量数据由图像像素坐标系op-ij转换到图像物理坐标系of-uv中。
3.2 of-uv→O-XYZ
将测量数据由图像物理坐标系of-uv转化到基准坐标系O-XYZ中,需要通过标定来确定工业相机在O-XYZ中的空间方位。设测量数据在O-XYZ中的坐标为(X,Y,Z),而其在 of-uv中的坐标为(u,v),如图 6所示,由于u轴和v轴分别与Y轴和Z轴平行,而且图像平面与X轴垂直,因而二者的转化关系为:

其中,(o0,u0,v0)为 of-uv的原点 of在 O-XYZ中的三维空间坐标,随着三坐标测量机各轴的运动而发生变化。
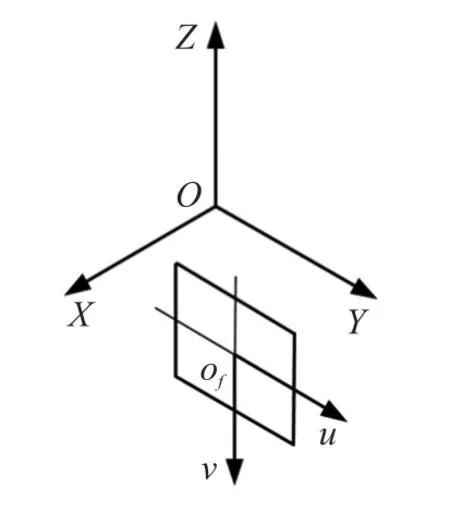
图6 of-uv与O-XYZ之间的转换关系
3.3 O-XYZ→OR-XRYRZR
在将测量数据由基准坐标系O-XYZ转换到回转台坐标系OR-XRYRZR的过程中,设测量数据在O-XYZ中的坐标为(X,Y,Z),而其在 OR-XRYRZR中的坐标为(XR,YR,ZR),则二者的转换关系如下:

在上式中,(X0,Y0,Z0)为 OR-XRYRZR的原点OR在O-XYZ中的坐标,而θ为回转台的旋转角度,其正方向定义为从原点OR沿着ZR轴正方向观察时的逆时针旋转方向。
在实际应用中,为了简化后续测量数据的坐标变换过程,本文首先通过机械调整使回转台的轴线处于竖直方位,即使其与三坐标测量机的Z轴相互平行,则此时回转轴线在基准坐标系O-XYZ中的单位方向向量被确定为(0,0,1)。而后采用了定制的长方体标定块,并通过回转台与三坐标测量机之间的配合,使工业相机对焦于标定块的表面并采集其锋利棱边的图像,而后再通过边缘提取、像素距离计算、物理距离转化和代数运算等步骤,最终确定了OR-XRYRZR的原点 OR在 O-XYZ 中的坐标(X0,Y0,Z0)。
3.4 OR-XRYRZR→o-xyz
最后,再将测量数据由回转台坐标系 ORXRYRZR转换到叶片坐标系o-xyz中,设RXR、RYR和RZR分别为绕XR、YR和ZR轴的旋转变换矩阵,而TR为平移变换矩阵。

4 实验过程
本文所搭建的四轴视觉坐标测量系统,选用北京航空精密机械研究所生产的PEARL 555型三坐标测量机作为系统平台,在其框架结构的基础上将工业相机安装在该型测量机的Z轴末端,以应对高压涡轮导向叶片上的气膜孔特征的形位参数检测任务,如图7所示。该型测量机采用先进的结构设计和工艺技术,轻便高效,其敞开的工作空间更具操作性,X、Y和Z轴均采用天然花岗岩,具有相同的热力学特性,同时采用内置钢丝的增强型同步带,从而使整机具有优良的动态性能[15],X、Y和Z轴的行程均为500 mm,各轴光栅尺的分辨率为0.5 μm,测量不确定度为(2.5+3×L/1000)μm(L为测量长度)。
在回转运动方面,采用了日本Yaskawa公司的SGMCS型直接驱动伺服电机作为系统的第四轴,该型电机可以在不带减速器的状态下直接驱动负载,能够实现从低速到高速的强力平滑运行,并且内置了20位的高分辨率编码器,定位精度可以达到1″,因而可以用于将被测零件精确定位到所需位置[16]。
工业相机选用大恒图像公司生产的水星MER系列工业数字相机,该型相机采用全局曝光的Sony IMX252 CMOS传感器,其分辨率为2 048×1 536,像素尺寸为3.45 μm×3.45 μm。为了配合该型工业相机的使用,选用了日本MORITEX公司的MML-ST系列工业远心镜头,该型镜头具有高对比度、高分辨率和低失真度的特征,其放大倍率为3×,工作距离为108.3 mm。
为了验证本文所提出的坐标系建立与转换方法的正确性和有效性,选取某型航空发动机的高压涡轮导向叶片作为被测物,对分布于其叶身上的多个气膜孔特征进行了测量实践,以获取被测气膜孔的分布位置参数,实验现场如图8所示。在测量开始前,需要调整好工业相机的空间方位,使其成像光轴与测量系统的X轴的运动方向平行,并将待测叶片固定在回转台上的叶片专用夹具中。

图7 四轴视觉坐标测量系统

图8 实验现场
在实验过程中,首先将叶片三维模型导入到上位机软件中,拾取模型上的气膜孔特征并进行测量轨迹规划;而后基于测量轨迹控制回转台的旋转运动,使叶片上的待测气膜孔朝向工业相机,并通过X、Y和Z轴的运动使工业相机对准被测气膜孔,使整个气膜孔处于工业相机的视场范围中;然后,通过X轴的前后运动以及对焦评价函数使被测气膜孔的出口表面处于工业相机的对焦平面上,此时可以采集到最清晰的被测气膜孔的图像,如图9所示;而后通过图像降噪、阈值分割和边缘提取等处理过程提取出图像中的气膜孔边缘上的像素坐标,对这些像素坐标进行最小二乘圆拟合,从而得到气膜孔的孔中心坐标,如图10所示;最后,通过各个坐标系之间的转换,将孔中心坐标由图像像素坐标系op-ij转换到叶片坐标o-xyz系中,就可以获得被测气膜孔的孔中心在叶片坐标系o-xyz中的三维坐标,从而实现被测气膜孔的分布位置的检测。

图9 采集到的气膜孔图像
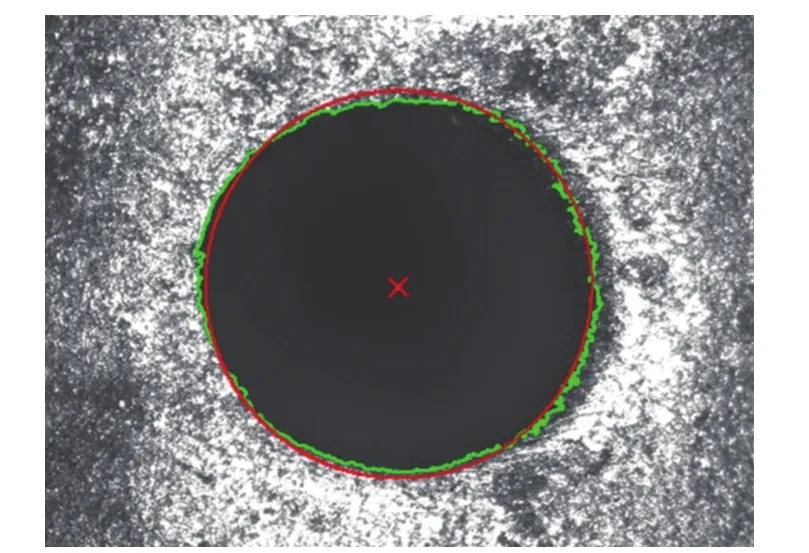
图10 被测气膜孔的图像处理
按照上述步骤,对分布于该高压涡轮导向叶片的进气边部位上的某一排气膜孔的孔中心坐标进行测量实验。该排共有12个气膜孔,并且沿着叶片坐标系的z轴方向等间距排列。首先,对该排气膜孔中的第一个孔连续进行10次等精度重复性测量,以验证测量系统的重复性精度,测量结果如表1所示。
从表1中可以看出,对于该气膜孔来说,孔中心坐标的测量结果的平均值为(28.991,-6.720,268.611),其中,x、y和z坐标的标准差分别为0.005 mm、0.004 mm和0.004 mm,则单次测量的极限误差分别为±15 μm、±12 μm 和±12 μm。 根据此类气膜孔特征的设计指标与检测要求,该测量系统能够达到的精度水平可以满足使用需求。

表1 第一个孔的测量结果 单位:mm
然后,通过轨迹规划对该排上的12个气膜孔逐个进行测量,其孔中心坐标的测量结果如表2所示。

表2 该排12个气膜孔的测量结果 单位:mm
从表2中可以看出,本文所设计和搭建的四轴视觉坐标测量系统,可以有效地实现被测高压涡轮导向叶片上的气膜孔分布位置的非接触式测量,并且其重复性精度指标可以满足此类气膜孔的检测需求,因而可以作为一项气膜孔特征的形位参数的检测技术解决方案,也可以用于其他一些零部件上的小孔特征的快速检测。
5 结论
本文应用三坐标测量机、回转台、叶片专用夹具、工业相机和远心镜头等搭建了非接触式的四轴视觉坐标测量系统,以充分应对高压涡轮导向叶片上的气膜孔的形位参数测量难题,从而将新型的视觉测量技术与传统的坐标测量技术结合在一起,充分发挥了各自的优点,进一步扩展了坐标测量技术的应用范围。在测量过程中,为了实现将工业相机所采集到的图像数据转化成为物理测量数据,并最终转换到叶片坐标系中,本文结合四轴运动系统与工业相机的特点,构建了包含图像像素坐标系、图像物理坐标系、基准坐标系、回转台坐标系和叶片坐标系在内的整套坐标系统,并确立了这些坐标系之间的转换关系,从而对处于不同方位的气膜孔实现了四轴联动测量。应用该测量系统对某型高压涡轮导向叶片上的多个气膜孔特征进行了测量实践,所得实验结果的精度水平能够满足此类气膜孔分布位置的检测需求,从而验证了本文所提出的坐标系建立与转换方法的正确性和有效性,也为后续将测量数据与气膜孔的设计数据进行比对并做出评价奠定了坚实基础。
猜你喜欢
农业装备与车辆工程(2022年2期)2022-10-30
导航定位学报(2022年2期)2022-04-11
内燃机与配件(2022年2期)2022-01-17
火箭推进(2020年2期)2020-05-06
制造技术与机床(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
军事文摘·科学少年(2016年11期)2017-02-09
中国设备工程(2017年10期)2017-01-20
光学精密工程(2016年3期)2016-11-07
