基于多传感器的隧道异常自动巡检系统的设计
2019-10-11 09:58江仲庆
应用技术学报 2019年3期
江仲庆
(上海浦江桥隧运营管理有限公司,上海 200023)
隧道通常是指作为地下通道的工程建筑物,具有某些其他工程无法比拟的优势[1]。它能克服高程障碍,缩短线路长度,减小坡度和曲率,从而提高线路技术标准。渗漏水和裂缝是2类最常见的隧道病害,隧道渗漏水是降低衬砌承载力、腐蚀隧道、致使混凝土开裂冻胀的主要原因[2],严重威胁了隧道的安全;而裂缝会降低钢筋混凝土结构的承载能力,甚至导致衬砌失稳和突然坍塌,威胁到隧道结构的运营安全。因此,通过传感器实时自动地检测隧道内渗漏水及裂纹的存在,进而能够及时准确的实施防护措施对整个隧道工程有着至关重要的作用。
目前,国内的隧道裂纹检测方法主要以人工肉眼和人工仪器为主[3],如文献[4]提到一套裂缝仪器检测方法,采用DJCK-2智能裂缝测宽仪测量隧道裂缝,测量时程序自动扫描捕获裂缝并在显示屏上实时显示裂缝的宽度数值,该方法检测精度高,需要大量的人力和时间。基于图像处理[5-6]的裂缝检测方法能够弥补传统检测方法的不足,高效准确地获取裂缝数据并节约人工成本,是一种理想的裂缝自动检测技术,该方法图像数据获取困难,检测范围受限。国外Yu等[7]通过控制移动机器人与墙壁保持恒定距离的同时利用电荷耦合器件(CCD)相机采集图像数据,并利用图像处理从采集的图像中提取裂纹信息,能够保证裂纹的精确识别,检测与交通不能同时进行。刘志强等[8]提出一种Permalog+区域漏水噪声监测系统,从声学原理角度分析了渗漏水声波的产生、传播途径、特点,实现对供水管网实现漏水监测的目的。吴鹏程[9]提出一种基于MCU的智能防漏水系统方案,该检测电路采用适当的电极型水传感器,根据电极浸水阻值变化原理,通过电压检测确定传感器的状态,该方案能有效处理家居中漏水问题,不适用于开放性场景。同济大学刘学增等[10]以隧道衬砌渗漏水面积为检测目标,研究出包括去噪、锐化、分割、修正的一整套数字图像处理算法,并开发了隧道衬砌表面病害数字图像识别系统,为隧道衬砌渗漏水病害检测提供一种便捷、低成本、直观、高效的方法。
然而,这些研究工作主要针对单一病害进行,检测需要做大量准备工作,传感器覆盖区域小,导致检测范围受限且不实时。为此,本文提出了一种基于多传感器的隧道自动异常检测系统,将工业相机和红外热成像摄像机功能模块化,安装在隧道中的运动巡检设备中,并设计了一种多邻域生长动态异常区域识别算法,对热成像摄像机获取的伪彩图进行渗漏水检测;为使裂纹检测范围更广及识别更精确,设计了一种基于相机标定的图像拼接算法获取隧道全部视场。经实验验证,该系统能够实时、准确地对隧道环境中的渗漏水和裂缝进行检测,对隧道的智能安全防护有积极的意义。
1 多传感器异常检测系统的设计
传感器(sensor)能够通过将感受到的信息转变成电信号或者其他形式的信号,将其转换得到所需的能够进行处理的信息。与机器结合相当于让其能够拥有视觉[11-13]、触觉[14]等感官,能够特定的识别和检测预定的目标,具有高效和准确等优点。而单一传感器所能获取的信息是有限的,因此,通过集成多传感器(multi-sensor)的异常检测系统,可增加其感官获取隧道中更多的信息,从而进行更加准确充分的识别和处理。
整个隧道异常检测系统如图1所示,高清相机和红外热成像摄像机模块化安装在隧道移动设备内,使用低功耗嵌入式中央处理器对传感器采集到的数据进行处理,再通过一套完整的网络系统进行信息和数据的传输。该系统是一个完整的系统,采用了标准的三层网络架构:① 数据采集传感器与嵌入式系统的数据采集传输层;② 设备内的各模块经过内置4G路由器进行相互通信;③ 主控室通过快速以太网建立服务器、客户端和移动设备之间的通信控制层。
2 渗漏水检测
渗漏水是运营隧道的一种比较普遍的病害。它不仅会腐蚀隧道的内部设备,而且是衬砌损裂[15]的主要原因。隧道环境复杂,顶壁和侧壁经常会发生渗漏水等隧道病害,越早发现则可以越早的防止危害进一步扩大,能够大大降低养护费用和维护成本。
通过安装在运动巡检设备中的红外热成像传感器,实时采集隧道内现场的红外数据,设备在固定于隧道墙面顶端的轨道上来回巡检,经过中央处理器的分析处理,及时对隧道内有无渗漏水情况进行监测。若发现渗漏水情况则通过网络系统发送异常信号至PC客户端,主控室的操作员则可通过中央计算机系统发现有渗漏水情况。与此同时,高清相机采集现场图像并通过图像拼接来将超高分辨率的现场图像传至云服务器,主控室工作人员根据从云服务器上下载的高清图像来确认是否有渗漏水。

图1 隧道异常检测系统结构图Fig.1 The structural diagram of tunnel anomaly detection system
2.1 红外成像原理
在电磁辐射中,Planck 定律描述了黑体辐射的能量
(1)
式中:h为普朗克常量;c为真空中的光速;k为电磁辐射频率;T为发射体的绝对温度;I(v,T)为黑体发射单位时间内的能量。
而对于红外辐射体,将式(1)进行全谱和全空间积分,考虑发射率影响,可得到单位面积在每秒时间内的红外辐射能量密度,遵从Stefan-Boltzmann规律
(2)
式中:ε为发射常数;σ为Stefan常数;T为发射体温度;A为辐射面积;P为净辐射能量。
式(2)常被用来测量物体的表面温度,通过红外摄像仪采集红外辐射体的温度分布与变化。
2.2 渗漏水检测算法
运动巡检设备在隧道往返运动的过程中,热成像模块持续采集伪彩图,提出了一种基于多邻域生长动态算法进行渗漏水检测,该算法在中央处理器执行,对采集到的热成像伪彩图数据进行分析处理,持续得出检测结果。算法流程图如图2所示,先将采集到的红外图像进行转灰度图,并二值化处理,之后建立灰度阈值块,阈值块的大小根据取得的数据设定,并逐行滑动,滑至某处检测出异常时,进行多邻域的滑动来判断是否为误检。若此异常区域的邻域异常数值达到预设参数值,则判定为该处有渗露水现象,发出指令进行渗漏水报警;若未达到预设的参数值继续进行滑动,直至到图像的最末行末列,即整幅图像检测完毕,未发现异常区域,则继续取下一张图并检测。

图2 多邻域生长动态算法流程图Fig.2 Flow chart of dynamic algorithm formulti-neighborhood growth
3 图像拼接与裂纹检测
对于墙面裂痕的提早发现是隧道维护的一个关键点,较深的裂痕可能对隧道的安全造成重大的影响。现阶段检测墙面裂痕基本采用人工的方式,进行肉眼的检测,在一定程度上无法做到全部裂痕的发现与排查,留有隐患。墙体裂痕的早期发现有利于隧道的安全,对此,如何早期便可以发现墙体裂痕并及时修整,防患于未然,是隧道维护方面应注意的问题。
传统视觉检测系统由于视场角限制,一次只能获取周围环境部分的视场信息,其余大部分视场信息彼放弃了,无法提供全方位的决策依据信息。或是采用全景相机、鱼眼镜头等设备,它们通过镜面反射或光学装置可将周围的场景投射到单个相机镜头中,从而获得大的视场。但得到的图像严重扭曲,分辨率低,对于后期的图像处理和检测算法极为不利。而该系统采用高分辨率的工业相机进行取图,利用图像拼接技术得到隧道中墙面和路面的全景图像,并采用基于霍夫变换的OSTU改进算法[16]对取得的全景图进行裂纹检测。通过基于相机标定的方法能够准确快速完成隧道无特征点环境的图像拼接,使得能够一次性地提供从给定视点处所能获取的全部视觉信息,为后续的图像处理,信息归类提供了有利的条件,其技术优势十分明显。
3.1 基于相机标定的图像拼接算法
图像拼接(mosaicing)是将多幅图像组合成一幅高分辨率图像的过程,拼接好的图像称为全景图像。此项技术在该系统中起到2个作用:① 渗漏水检测系统发出异常信息后,操作员能够通过图像拼接的高清图像准确判定是否为渗漏水;② 增加图像中隧道裂纹的可识别度和检测准确度,能够检测到整个隧道的状态。
现有的图像拼接技术都是基于频域、基于灰度和基于特征点的经典的全景图拼接方法。频域相关匹配方法将图像在空间域中的匹配转换成频率域的匹配,利用了傅里叶变换的平移原理。该方法对于待拼接图像间只存在平移关系时有较好的效果,但当存在旋转变换时,则需要大量反复的空域和频域转换,较大的计算量影响到了配准的效率。基于灰度的方法利用图像的灰度信息进行配准。该方法虽然易于实现,但也存在计算量大,效率低的问题。基于图像的特征进行拼接,可以提取直线、弧、特征点、轮廓等图像特征进行图像匹配。该种方法会对图像的特征点进行大量的计算提取,这导致了配准效率的下降。
无论采用什么方法,图像拼接过程一般都由预处理、图像配准、图像融合3个步骤组成,以上3种拼接方法都是在图像配准这部分需要大量的计算,导致效率低。因此,采用基于相机标定的方法(见图3),事先标定好相机获取的图像间的旋转平移参数,在图像拼接过程直接利用这些参数进行拼接融合,可节省大量时间,极大地了提高拼接效率。

图3 基于相机标定的图像拼接过程Fig.3 The image mosaic process based on camera calibration
3.2 裂纹检测
由于照明光源影响、道路两旁物体的投影、路面上的污渍等外界因素,以及路面本身纹理特征的干扰,拍摄到的图像普遍存在着缺陷:图像整体偏色、亮度不均、噪声多且杂等。这些会使裂缝很难被辨识或者被完整的提取。为了能清晰完整的分割裂缝与背景,需对裂缝图像进行预处理:① 对图像进行灰度化及降低分辨率处理。② 用加权邻域平均法[17]对图像进行平滑操作,去除噪声。③ 用八方向Sobel算子[18]对图像进行边缘增强。
4 实验结果与分析
为了测试该系统的可行性,将通车前的杭州文一路隧道作为实验场景(见图4),该隧道是杭州“一环、三纵、五横”城市快速路网系统中“一横”德胜路至文一路的重要组成部分,且车流量较大,隧道内日常人工巡检带来了人员安全风险和影响路网通行能力的困扰。通过在杭州文一路隧道应用该套基于多传感器的隧道自动巡检系统,可以实现自动巡检逐步替代人工巡检,解决上述两点难题。异常检测隧道环境的截面如图5所示,装有红外热成像传感器和高清相机的移动设备(见图6)在固定于隧道斜上方的轨道上来回运动,对整个隧道顶部的渗漏水和地面和顶部的裂纹进行实时检测,并通过在隧道顶端持续抹水创造有渗漏水的实验环境来验证多邻域生长动态算法;设计了一套转台机械结构来采集待拼接的图像序列,在中央处理器执行图像拼接,采用的基于霍夫变换的OSTU改进算法文[16]已经得到充分的验证。
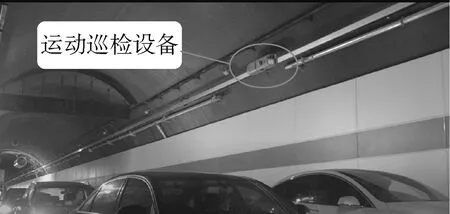
图4 杭州文一路隧道应用场景实物图Fig.4 The application scene physical map of Wenyi Tunnel in Hangzhou

图5 隧道异常检测截面示意图Fig.5 The diagrammatic sketch of tunnel anomaly detection
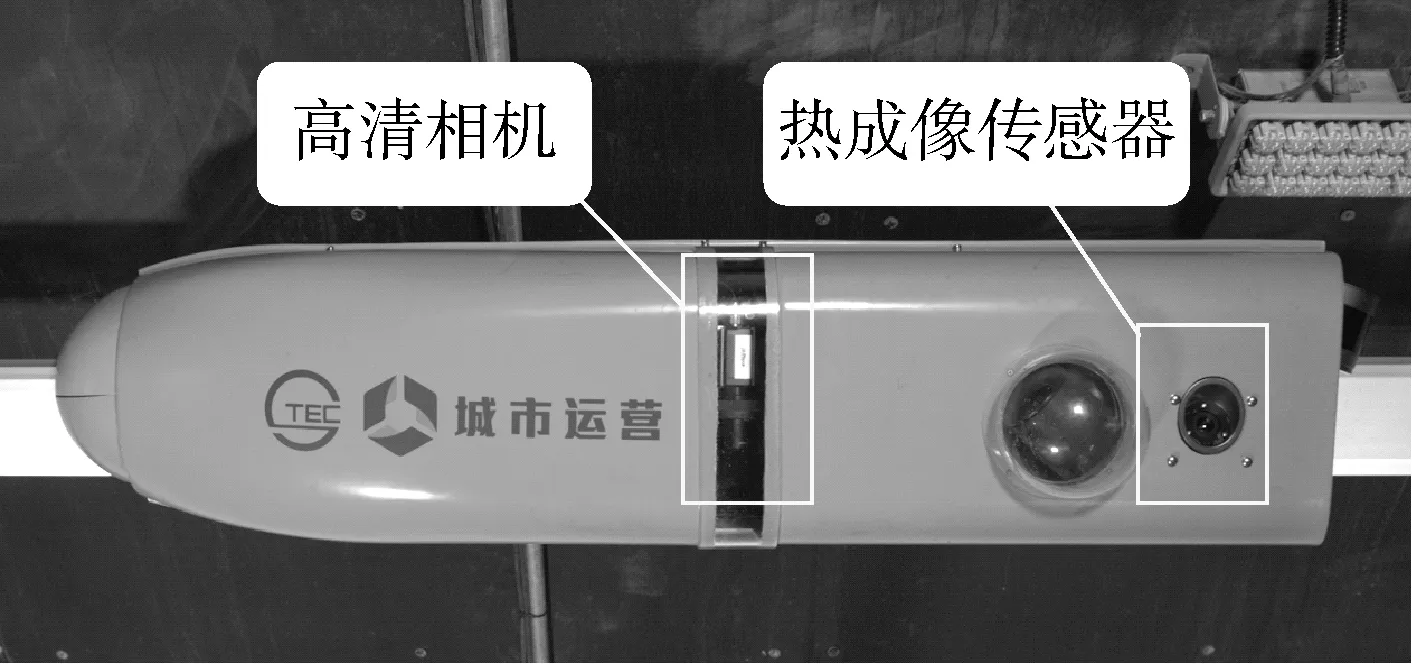
图6 运动巡检设备Fig.6 The moving inspection equipment
4.1 热成像检测结果
系统采用测温型热成像摄像机DH-TPC-BF5400,将其模块化装在运动巡检设备中(见图6),其探测器类型为非制冷氧化钒焦平面探测器,支持14种伪彩色,编码输出的伪彩图像为 1 280×1 024 pixel,热成像选用的镜头焦距为7.5 mm,使其在同等条件下具有更大的视场,通过千兆网口与中央处理器相接实现采图,实时采到的白热伪彩图识别检测结构如图7所示,摄像机朝向隧道顶部防护板,在没有温差的正常情况下拍摄结果为无特征的固定灰度的伪彩图。
图7(a)表示没有任何水的情况,剩下的5幅图与其进行对比可观察到黑色区域深浅不一,表示的是温度差异,实际则表示渗水的程度不一样,图像灰度值较高(伪彩图中显示为越黑)的区域渗水的程度较深,与之对应的就是长时间渗漏水的实际情况。如图7(b)~(f)所示,检测到渗漏水的区域用白框框选出来,而相对灰度值不高的区域根据阈值大小将其视为正常区域。
建立一个10×10 pixel的滑动窗口分别在不同比较阈值下检测异常区域,该阈值为区域块的平均灰度值减去整幅图像的平均灰度值,以图7中的(a)、(b)、(c)、(e)和(f)这5幅热成像伪彩图作为实验对象,检测到的平均灰度值(gray_l)和邻近异常区域数量(num)如表1所示。

图7 隧道异常检测截面示意图Fig.7 The diagrammatic sketch of tunnel anomaly detection
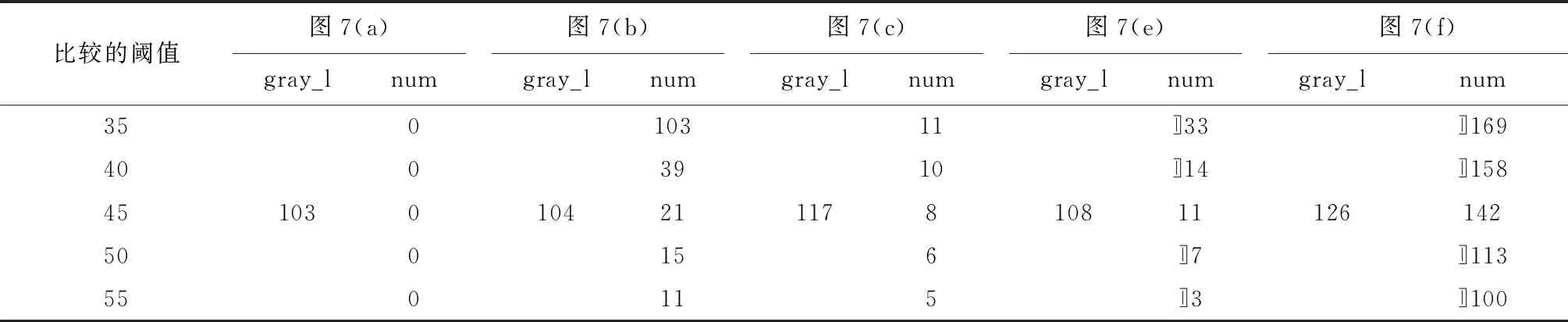
表1 热成像检测结果比较分析Tab.1 Comparison and analysis of thermal imaging test results
通过分析上表中的数据,若窗口中的平均灰度值比整幅图像的平均灰度值大40为最合理判定阈值,即在此阈值下邻近异常区域数量>8则判定为该区域异常,通过网络系统完成渗漏水报警。并发送图像拼接命令将现场高清图像传至云台,等待操作人员确认是否为渗漏水。该模块现场检测效果如图8所示,该图为系统的巡检结果与现场的真实图像叠加形成,具有较高的检测精度。
图8 渗漏水检测效果图Fig.8 The effect image of leakage water detection

图10 图像拼接结果Fig.10 The image mosaic results
4.2 图像拼接结果
为能够拍摄到隧道中全部视场,设计了一个转动的机械机构及一套工业相机调焦机构,采集隧道中的图像进行拼接。系统接收到拼接指令后,控制转台舵机先转至第一个位置,调焦舵机转至对应位置,之后触发相机SDK进行采图。并设定一个采图的数量,如果未达到指定值则重复上一过程,反之则表示完成采图,进行图像拼接。该机械结构三维图如图9所示,整个高清相机模块(见图6)同样安装在运动巡检设备中。

图9 高清相机转台图Fig.9 The graphic model of high resolution camera turntable
利用标定板对旋转的单相机进行标定,通过相机标定得到相机每个位置相机变换参数,再利用标定得到的参数完成图像拼接,最后进行图像融合去拼缝,得到拼接图像。图像拼接过程各相关参数如表2所示。

表2 图像拼接过程相关参数Tab.2 The parameters of image mosaic process
由于隧道环境特征点少,而传统图像拼接基于特征点查找匹配,本文采用相机标定得到全景图拼接所需的参数完成拼接过程中图像配准这一步骤,可实现无特征点图像拼接,减少了拼接时间,并极大地提高图像拼接精度,该算法具有强鲁棒性。
5 结 语
针对隧道中裂纹和渗漏水的情况,提出了一种基于多传感器的隧道自动异常检测系统。将红外热成像设备和工业相机模块化安装于运动巡检设备中,分别对渗漏水和裂纹进行实时检测,该系统在一套完整的网络架构下进行通信和数据传输。实验结果表明,本文提出的系统能有效检测到隧道渗漏水和裂纹,能够及时反馈至控制中心采取措施,提出的渗漏水检测算法能够准确快速检测到温度异常的区域,且设计出的基于相机标定的图像拼接算法具有很高的鲁棒性,拼接得到的图像分辨率高、成像质量好。该系统所采用的改进的OSTU裂纹检测算法效果良好、稳定,抗干扰能力强。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
北京航空航天大学学报(2022年6期)2022-07-02
成都信息工程大学学报(2021年4期)2021-11-22
天津医科大学学报(2021年1期)2021-01-26
汽车维修与保养(2020年11期)2020-06-09
World Journal of Diabetes(2019年7期)2019-07-23
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
扬子江(2019年1期)2019-03-08
中国惯性技术学报(2017年1期)2017-06-09