智能化无人机植保作业关键技术及研究进展
2019-09-10 07:22徐旻张瑞瑞陈立平唐青
智慧农业(中英文) 2019年2期
徐旻 张瑞瑞 陈立平 唐青









摘 要:搭载高性能传感器和施药装备的农业植保无人机系统是精准农业领域具有代表性的智能装备之一。本研究首先从前端田间作业环境动态感知技术出发,阐述了无人机光谱成像遥感、多传感器融合的SLAM实时环境建模等技术在无人机植保作业方面的应用情况;然后对精准施药过程建模与优化控制有关的前沿技术进行了分析,包括旋翼下方风场结构演化及雾滴沉积过程仿真建模、多区域全覆盖条件下的智能作业路径规划、精准变量施药控制等;最后论述了作业效果评估与过程监管相关技术的发展现状,包括施药作业质量评价方法、基于云平台数据管理的全过程可视化监管等。在总结现有技术发展现状基础上,对未来智能化无人机植保关键技术发展趋势进行了预测,阐明了光谱图像获取与计算智能的深度学习识别聚类、基于高精度雾滴谱和风场模型预测的精准变量施药作业路径规划、基于传感器实时数据的作业质量评估和作业监管等新技术手段,将在遥感信息反演、药液飘移抑制、作业效率优化、施药过程管控等方面带来革命性的进步,使植保作业数据化、透明化,全过程可观化可控制,推动农业生产管理从机械化向智能化和智慧化迈进。
关键词:无人机;植保;智能;感知;施药
中图分类号:S251 文献标志码:A 文章编号:201812-SA025
徐 旻, 张瑞瑞, 陈立平, 唐 青, 徐 刚. 智能化无人机植保作业关键技术及研究进展[J]. 智慧农业2019,1(2): 20-33.
Xu M, Zhang R, Chen L, Tang Q, Xu G. Key technology analysis and research progress of UAV intelligent plant protection[J]. Smart Agriculture, 2019, 1(2): 20-33.(in Chinese with English abstract)
1 引言
在信息技术的推动下,现代航空技术迅速发展,尤其是无人机相关技术和应用成爆发态势,从军事打击和战场侦查,到工业现场电力自动巡检和交通執法,再到日常农业植保施药和摄影娱乐,无人机系统已广泛应用于生产生活的各个领域。农业航空应用是现代农业的重要组成部分和反映农业现代化水平的重要标志。与欧美发达国家相比,我国农业航空技术起步较晚,但通过近年来的高速发展,目前中国农业航空已经由最初的有人驾驶航空器作业为主发展到有人驾驶和无人驾驶航空器作业并存的局面,尤其是无人机植保作业规模、面积已位居世界前列[1-3]。植保无人机可集成智能飞控系统、复合光电吊舱、精准变量喷施设备等多种新型任务载荷,对作物进行遥感信息获取和定量定点精准施药,同时利用自身旋翼下洗风场特性,加速雾滴沉积到作物冠层表面,具有复杂地形适应性强、作业效率高、施药穿透性好的优势[4,5]。2014年,在美国麻省理工学院发布的《MIT技术评论》中,将农业无人机技术作为第一位,列为年度十大突破性科技创新技术。农业农村部2015年2月印发了《到2020年化肥使用量零增长行动方案》和《到2020年农药使用量零增长行动方案》,明确提出了“精准施肥减量”的要求,进一步推动了以无人机植保为代表的超低量作业模式的发展。
农业植保无人机系统由无人机飞行平台、航空喷洒作业设备、作业管理与监控系统组成,是涉及到航空飞行器、信息技术、流体力学、农业植保等多技术领域交叉融合的复杂作业系统。无人机植保作业面临非常复杂的环境条件,一方面其超低空作业,地面构筑物和农田基本水电设施的会影响其飞行安全;另一方面植保作业实效性强,需要在规定的时间段将药剂喷洒至作物特定的部位,才能保证较好的施药效果。针上述作业技术需求,科研人员在非结构化条件下的环境实时感知、基于作物病虫害智能识别的智能作业决策方法、基于风场雾滴沉积模型的变量对靶施药控制、以及基于数据的作业评价领域投入了大量研究,将人工智能技术、并行计算技术以及智能硬件等方面取得的突破性方法和技术手段,引入到农业航空作业应用中,使无人机植保技术向着智能化、系统化、精准化方向发展。
本研究从农情遥感探测、作业过程优化控制、施药效果监管评估三部分对智能化农业无人机技术发展研究现状进行论述,总结了近年来农业无人机领域代表性技术成果,同时对未来智能农业无人机技术发展趋势进行了分析预测。
2 作业环境及对象感知探测
2.1 前端作物长势信息智能探测
2.1.1 多光谱传感器获取的作物长势信息
采用微小型无人机搭载多种传感器遥感信息平台获取农田作物信息,具有运行成本低、灵活性高以及获取数据时效性高等特点。
日本长崎大学学者谷口等[6]采用小无人机搭载5波段近红外相机和可见光相机对稻米梯田进行低空遥感影像采集,获取了植被覆盖指数(Normalized Difference Vegetation Index,NDVI)数据和水蒸发量之间的相互关系。杨贵军等[7-10]利用光谱辐射仪和成像光谱仪在冬小麦试验田进行空地联合试验,基于获取的孕穗期、开花期以及灌浆期地面数据和无人机高光谱遥感数据,实现了估测冬小麦叶面积指数(Leaf Area Index,LAI);同时基于无人机搭载的多传感器平台开发了作物表型信息获取装备,对作物表型特征快速采集和解析,反演作物NDVI、株高、叶绿素含量、病害易感性、干旱胁迫敏感性、含氮量、产量等关键信息。Patrick等[11]利用植物反射的可见光和近红外光来研究花生健康状况,运用无人机遥感方式采集了20种不同基因类型花生的番茄斑萎病的表型特征,通过对比地面调查获得的发病率真值,依据作物表型光谱图像特征构造植被指数,建立被感染情况的评估模型,进而确定疾病检测的最佳植被指数和图像分布特征。Albetis等[12]利用无人机搭载多光谱传感器,对葡萄黄体病发病的藤蔓进行识别,采用单变量和多变量聚类算法,有效识别发病的红葡萄藤,通过并剪除发病藤蔓,避免病体扩散。在向日葵种植区域杂草识别中,小型无人机可搭载多光谱传感器和相机,快速获取小区内种苗和杂草的图像,利用图像处理技术对各种杂草分布情况进行估计,为在向日葵生长早期进行杂草清除提供依据[13]。通过上述研究发现,对多光谱传感器图像的解析,可精准获得作物病害在某些光谱段上的量化特征参数,为作物病害识别提供精准的监测手段。
2.1.2 基于深度学习的遥感影像处理
农业遥感信息处理主要集中在对获取图像信息的反演,因此,基于深度学习的人工智能模式识别技术也在农业遥感信息处理领域表现出巨大潜力。将传统的随机森林分类算法和基于卷积神经网络的深度学习方法用于卫星影像处理,对比其结果显示,在存在云雾干扰的情况下,深度学习方法对玉米、大豆等作物的分类识别能力远高于传统随机森林方法[14]。过去统计树上的果实会耗费大量的人力,但是采用深度学习的图像识别算法,可快速对桔子、苹果的产量进行统计,同时通过基于果实形态特征的识别可快速识别出果实缺陷,实现按品质智能分类[15]。针对受红脂大小蠹危害的油松林,孙钰等[16]用无人机获取遥感影像图片,训练精简的SSD300目标检测框架,即可直接识别无人机航片,无需校正拼接,降低模型的参数数量和运算量,加快检测速度。基于深度学习的图像处理颠覆了传统图像聚类方法,将农业遥感技术人员从图像算法研究转向对田间信息样本的采集和积累,最大限度的发挥了农业信息化过程中遥感大数据样本作用。
2.2 农田环境的动态感知
农田作业环境是极其复杂的非结构化地表区域,作物本身、农田水利设施、构筑物交错并存,且经常发生相对位置变化。要实现自主对靶和安全作业,需要解决无人机和作物冠层相对位置、以及无人机和田间各种障碍物相对位置的实时获取的问题。应用智能化的光电探测和模式识别手段获得环境中各种非作业目标的基本尺度特征、类型属性等关键信息,对环境中各种对象的静态特征和动态运动趋势进行在线观测可解决上述问题,因此,面向田间作业环境的感知技术已成为农业无人机自主作业的必要条件[17]。基于机器视觉和多传感器融合的智能模式识别方法,为此类应用需求提供了有效的解决途径。在丘陵或地形起伏区域,作物冠层与无人机的相对高度信息对作业效果和飞行安全至关重要,采用新型微波雷达传感器和气压高度计、GNSS、惯性测量单元等多传感器融合方式,可以有效地测量无人机机体相对地面及作物冠层的高度,实现仿地跟踪飞行[18],如图3所示。
2.2.1 激光雷达对环境信息进行SLAM感知
为了获得更精确的环境信息,学者们采用扫描式激光雷达传感器对环境进行即时定位与地图构建(Simultaneous localization and mapping,SLAM),利用雷达测距信息生成周围环境的稀疏点云数据,获得障碍物或标记点与机体的相对距离、方向、以及物体轮廓特征,对相对位置速度误差进行估计,结合惯性测量数据和外部障碍物或标记点信息作为观测量,通过扩展卡尔曼滤波(Extended Kalman Filter,EKF)、无损卡尔曼滤波(Unscented Kalman Filter,UKF)等算法,消除累计误差[19-22]。在使用雷达等飞行时间(Time of Flight,TOF)传感器获得距离信息时,同步引入与距离、视线角相关的反射信号强度信息,对SALM建模观测方程进行增广,可进一步降低3D环境中的建模误差[23]。为了便于验证各种SLAM感知算法,Gazebo simulator等SLAM开发仿真环境也开始被应用于农业。Habibie等[24]采用激光雷达和可见光双目视觉的方式,开发了果园SLAM系统,系统基于激光雷达对环境中障碍物和树木进行建模,基于可见光视觉系统对果实位置进行探测,并对果实品质进行估计,最后在Gazebo中进行仿真验证,仿真结果显示该方法能有效对果园内的环境进行实时建模,为植保作业提供对靶信息。系统工作过程如图4所示。
2.2.2 机器视觉空间物体建模
目前运用可见光或双目视觉图像对环境和物体视觉特征信息进行提取,再运用光流场速度算法及投影变换方法对视场中障碍物的相对位置、速度进行最优估计的方式,已经取得了很大的发展,并已经具备应用于无人机植保作业的技术条件。通过采用多个传感器的视觉图像对物体进行空间三维建模和运动状态估计,并对稀疏点云数据加密,可精确再现周围三维环境空间的物体分布坐标信息[25,26]。无人机控制系统利用这些环境状态信息完成自主作业飞行决策,可实现在复杂作业环境中的安全对靶作业。
3 精准施药过程建模与优化控制
3.1 雾滴沉积运动建模
不同于地面植保机械,无人机航空植保作业时无法深入作物冠层中施药,只能通过旋翼风场裹挟雾滴到达作物病害部位,因此无人机植保效果受旋翼下洗气流、环境风场、飞行高度、作业速度等多种因素影响[27]。要想达到精准变量施药的目的,必须对喷头所在风场和喷头雾化参数之间的耦合关系展开研究,建立雾滴沉积漂移过程的动力学模型,从而实现对雾滴有效沉积区域的实时预测,为控制系统精准施药提供依据。
3.1.1 霧滴沉积特性研究
国内外针对无人机施药雾滴沉积特性的研究已经开展了多年,目前常用的研究手段为田间布点试验,对试验数据进行定量统计,获得样本的沉积点密度、粒径等。此种方式可对雾滴沉积效果进行量化评价,并在一定程度上获取雾滴沉积飘移与飞行高度、雾滴粒径大小、喷头布局和外部气象条件之间的影响关系和经验公式[28,29]。但此类试验受到环境条件和现有仪器技术水平的影响,只能对最终沉积结果进行静态观测,无法获得雾滴在喷头和风场作用下的运动过程及沉积穿透作用机理,难以形成通用的模型及结论。美国在1979年就开始基于固定翼有人机尾涡运动模型及高斯分布方法的建立雾滴飘移预测模型,并研发相关软件AGDISP[30]。唐青等[31,32]基于计算流体动力学(Computational Fluid Dynamics,CFD)模拟获得了固定翼有人机在不同作业条件下的
雾滴沉积飘移模型,如图5所示。高精度格式CFD模拟旋翼翼尖涡与试验结果对比如图6、图7所示。
3.1.2 复杂流场湍流模型数值求解
无人旋翼植保机的下洗气流结构复杂,针对其雾滴沉积漂移预测的模型已经成为新的研究热点。在数值计算方法研究方面,高精度格式瞬态算法具有较好模拟精度,但是主要用于基础的风场结构研究领域,未结合地面作业和雾滴运动模型;而在行业应用主要以定常流平均场模拟为主,注重对实际作业条件及雾滴运动的模拟[33,34]。
综合目前的研究结果分析,针对农用无人机面临的近地面复杂流场环境,要获得较为真实的涡管三维运动仍需高精度瞬态算法和大量计算周期,难以直接应用,而采用基于雷诺平均方法(Reynolds Average Navier-Stokes,RANS)湍流模型数值求解N-S方程,通过优化自适应网格
和并行算法,可降低计算周期,提高系统的实用性[35-37]。在喷雾模型构建方面,目前仍以非接触式测量方法为主,通过激光衍射、高速粒子图像测速等手段,对特定喷头、助剂、喷杆结构布局、管路压力等喷施参数下的雾滴粒径及速度的空间分布进行测量,获得无人机施药作业的喷雾模型。基于罗辛-拉姆勒(Rosin-Rammler)分布模型简化后,与无人机风场模型进行耦合,求解离散相雾滴的运动轨迹,从而实现雾滴沉积飘移规律的预测,以达到对作业过程中药剂覆盖区域与飘移特性的估计和规避施药作业风险的目的。
3.1.3 精准施药控制及先进雾化
无人机施药主要面向小地块区域,具有超低量、高精度的特点,需要将飞行导航控制信息与精准变量控制结合起来,依据飞行及作业状态信息的关键参数来实现精准变量喷洒控制,主要包括作业飞行控制技术、流量精准检测、流量输出控制、喷头雾化控制四方面技术。无人机的喷洒系统管路结构布局紧凑,采用传统的涡轮计数式流量计响应速度慢,且需要对管路进行改造,不利于应用,而超声非接触式流量传感器精度高响应快,且不影响系统管路,将逐步取代现有涡轮流量计。流量控制仍以传统的功率调节控制泵流量的方式为主,目前逐步引入机体姿态、位置、飞行速度、作业相对高度、以及环境气象条件等参数,共同完成控制决策,获得最佳的施药回收效果和沉积精度[38-41]。随着微机电系统(Micro-Electro-Mechanical System,MEMS)技术的发展,直接对单一喷头的独立控制必将成为未来研究的重点。在雾化技术方面,通过实际作业测试,采用电机控制的离心雾化喷头具有雾滴粒径谱分布窄,雾化幅宽大的特点,相对于压力喷头和液力雾化喷头的效果有明顯的优势,目前已进入商用阶段[42-44]。无人机静电喷头具有雾滴漂移小,附着力高的特点[45]。何雄奎等[46]针对航空施药植保无人机设计了双极性接触式航空机载静电喷雾系统,在轻型油动直升机上对喷施油剂和水的电荷与雾化效果进行了测试,结果表明此类静电喷头与油剂配合使用,可有效提高雾滴沉积分布均匀性。国外学者在喷头技术上也已经开展多年的研究,从通用喷头、静电喷头、抗漂移喷头、逐步转向精准变量喷头。Daggupati[47]将微机电系统和喷头进行集成设计,通过微型电磁阀开关动作来调解喷口出水量,实现变量喷雾作业。Funseth等[48]采用步进电机驱动流量调节转盘转动的方式改变流体喷嘴的流体入口尺寸,从而实现变量喷洒。MEMS系统技术将控制、执行机构进一步小型化,精细化调解喷洒雾滴谱进行抗漂移和精准变量施药已经成为新的研究趋势。
3.2 作业路径最优算法
植保无人机载荷和续航能力较弱,且作业区域多为分散的小面积不规则区域,如何进行有效的作业路径优化,减少农业无人机作业过程无效的非作业飞行距离和时间具有重要意义。目前国内外农业无人机作业路径规划主要采用全覆盖算法,即规划路径必须对作业空间实现完全的覆盖。首先采用单元分解方式,参考地面作业机具工作模式,将作业区域按种植方向以梯形方式、栅格、维诺图(Voronoi diagram)等方式进行分割,在分割区域基础上进行单元分解和数字标记,然后再运用A*、动态规划(Travelling Salesman Problem,TSP)、遗传算法(Genetic Algorithm,GA)等优化搜索算法,最终使转弯、往返加药点等无效作业路径长度最短或作业能耗最小[49]。
农业植保无人机作业路径规划方法研究目前主要围绕单一区域多架次作业和多个非连通区域作业调度两个方面开展。
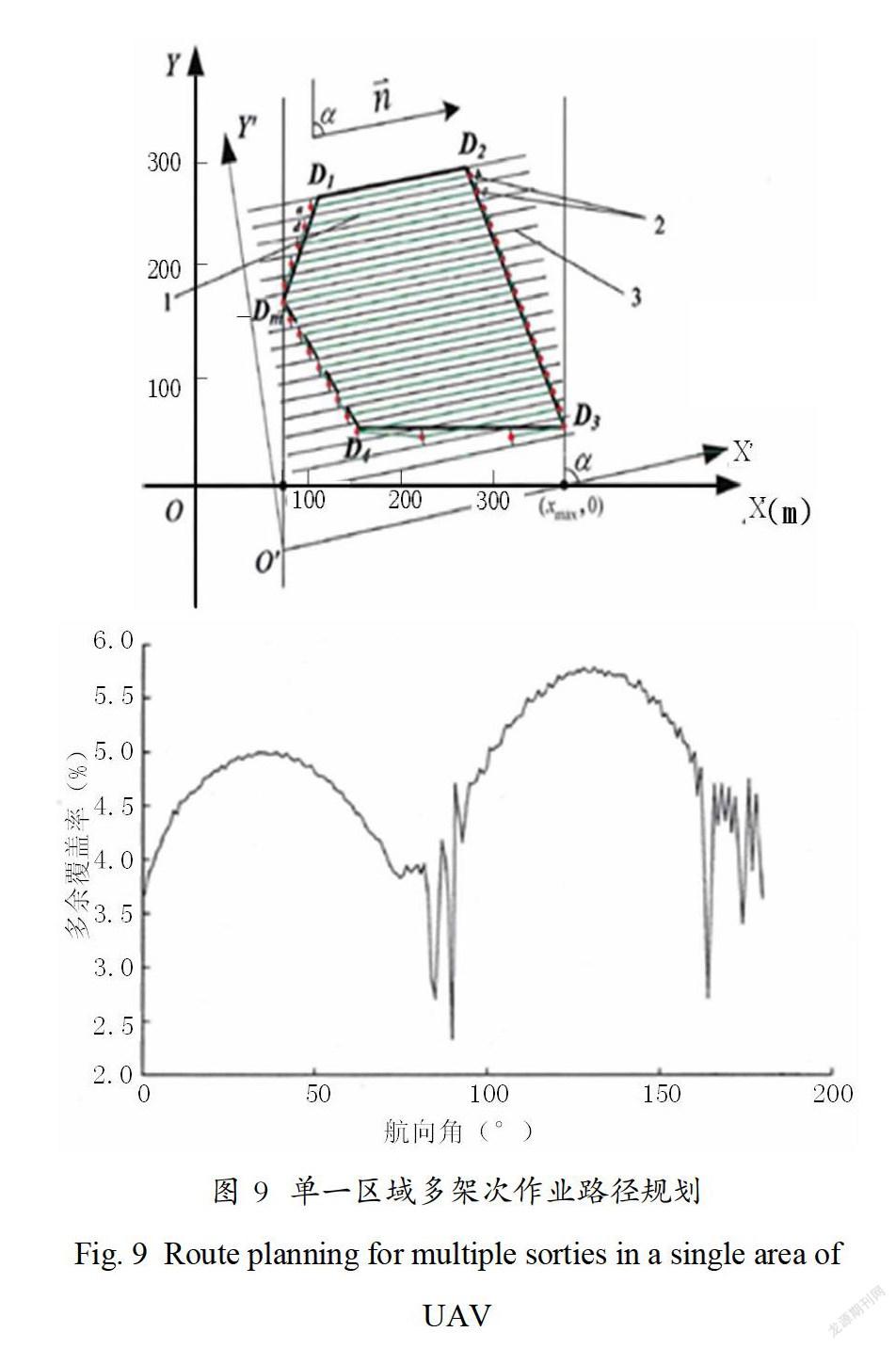
3.2.1 单一区域多架次作业路径规划
在单一区域中,由于种植方向约束,植保无人机作业通常采用单一方向规则往复的“牛耕法”,当药剂用完时再返回加药点补充药剂继续作业,这种方式作业中,地头转弯和多架次往返加药距离会因为作业规划不同而有很大差异,导致不必要的非作业能耗损失(图8、图9)。为了便于将计算智能引入作业路径规划中,栅格法被普遍用于构建作业环境描述模型,一方面可对作业区域进行精细到作业幅宽量级的数值化描述,另一方面有利于和GIS系统进行坐标的转化,将平面坐标点阵和大地坐标系映射关联起来。在区域栅格化后,根据区域面积、形状、作业航向方向、底边距离,为相应栅格赋予作业概率,优先选择概率高的栅格行进作业,同时以往返飞行、电池更换、药剂装填等非植保作业能耗最小为目标函数,通过采用引力搜索等智能搜索方法,实现对返航点数量与位置的寻优,进而优化作业路径[50-54]。
3.2.2 多个非联通区域多架次作业路径规划
对于多个非连通区域作业问题(图10),先对单个作业区域进行局部作业路径规划,再将各区域作业顺序进行编码,采用遗传算法进行多个区域间飞行作业任务优化调度,从而最终优化整个全过程作业路径,提高无人机作业效率,目前通过仿真和示范试验已证明此方法的有效性[55]。多机协同植保作业路径规划及分配技术可充分发挥植保无人机低成本,易于使用的特点。Luo等[56]依据无人机动力学特性约束和作业区域杜宾曲线(Dubins)距离参数,构造基于时间窗和作业方向的多机作业效益函数,利用遗传算法设计多机协同作业路径规划算法,优化路径分配,提高作业效率。目前多机协同植保施药作业路径规划技术研究尚处于起步阶段,需要进一步开展依据无人机作业能力参数和施药覆盖效果的全局作业路径规划算法的研究。
4 作业效果综合评估与过程监管
4.1 植保施药效果的综合评价
植保施药的雾滴分布特性重要评价指标包括回收率和均匀性等,其中雾滴的回收率是检验药液沉积量的直接指标,沉降药液的均匀性是反映作业沉积质量的重要指标[57]。传统的雾滴沉积测量方法利用聚乙烯软管、聚乙烯板、雾滴采集卡、水敏纸、棉线和荧光纸带等采集农药雾滴分布,通过显微镜或图像软件分析雾滴覆盖率和雾滴密度。在药剂中添加示踪剂可估测农药沉积量、覆盖范围、雾滴粒径大小等参数[58]。利用无人机高光谱成像技术获取的叶片区域药液的光谱信息,可用于分析叶片施药后的药效;对获取的药物云团探测区域雾滴分布的红外成像光谱进行特征分析,能够反演药物云团浓度图像,并对雾滴漂移情况进行观测[59]。地面药效评估将逐渐从单纯的作业后效果评价向作业中信息反馈,形成实时作业闭环。张瑞瑞等[60]基于电容传感器原理设计开发了一款分布式雾滴沉积传感器及检测软件,该系统能够监测雾滴从沉积到蒸发随时间变化的全过程并将数据实时获取、回传、以及统计处理,具备了实时沉积效果评估的能力。新型传感器和物联网技术的应用丰富了作业效果评估的技术手段,探索并实现大闭环施药作业将成为新的热点。
4.2 基于云端数据管理的作业过程监管
植保无人机应用呈爆发态势,其作业过程产生大量的数据和服务信息,采用物联网技术,可对无人机作业全过程数据进行采集、分析、管理,实现对农作物长势、病虫害爆发趋势、药剂使用综合效果、种植面积变化趋势和区域产量等信息进行动态预测[61,62]。陈立平等通过采用“机载终端+网络云服务器”的应用模式,在无人机体上加装关键作业状态信息传感器和移动数据通信模块,所采集的作业高度、流量和飞行速度等信息,可直接通过公共数据网络上传至数据服务器,再运用多指标约束的架次面积统计方法统计作业量,评估作业质量,最终可获得区域总作业量、病虫害类型、基本作业效果和药剂使用量估计等宏观信息。
5 问题及建议
智能无人机植保是目前精准农业领域热点技术,表现出巨大的发展潜力,但还需要在下列方面开展进一步研究探索:
(1)进一步开展基于遥感、地面传感器数据的多源信息融合智能作业决策方法的研究,引入固态激光雷达等新型复合光电探测技术,构建针对典型病虫害的多源信息样本库,加强实时环境感知和精准对靶技术研究。
(2)目前的无人机用喷洒器械技术对尚未达到高穿透性、窄雾滴粒径谱的作业要求,需要进一步结合MEMS技术、可控材料技术、探索雾滴形成机理,创新喷洒器械结构、控制方法,形成精准粒径谱控制装置。
(3)随着作业经验的积累和智能规划方法的引入,模拟仿真和快速数字推演技术使大部分过程状态变量在实际作业之前就已经被准确的估计出来,在此基础上可以开展基于虚拟样本的强化学习算法研究,探索障碍物规避和多机协同避碰的智能植保作业路径规划方法。
智能化植保无人机植保作业已成为未来精准农业领域最具有前景的技术,必将引起新一轮农业生产技术变革,从而对农业无人机植保技术的研发、应用造成深远的影响。
参考文献
[1] 陈晓明, 王程龙, 薄瑞. 中国农药使用现状及对策建议[J]. 农药科学与管理, 2016(2): 4-8.
Chen X, Wang C, Bo R. Current situation of Chinese pesticide application and policy suggestions[J]. Pesticide Science and Administration, 2016(2): 4-8.
[2] 杨陆强, 果霖, 朱加繁, 等. 我国农用无人机发展概况与展望[J]. 农机化研究, 2017, 39(8): 6-11.
Yang L, Guo L, Zhu J, et al. The development situation and prospect of agricultural UAV in China[J]. Journal of Agricultural Mechanization Research, 2017, 39(8): 6-11.
[3] 娄尚易, 薛新宇, 顾伟, 等. 农用植保无人机的研究現状及趋势[J]. 农机化研究, 2017(12): 1-6.
Lou S, Xue X, Gu W, et al. Current status and trends of agricultural plant protection unmanned aerial vehicle[J]. Journal of Agricultural Mechanization Research, 2017
(12): 1-6.
[4] 周志艳, 臧英, 罗锡文, 等. 中国农业航空植保产业技术创新发展战略[J]. 农业技术与装备, 2014(5): 19-25.
Zhou Z, Zang Y, Luo X, et al. Development strategy of technological innovation and innovation of Chinese agricultural aviation plant protection industry[J]. Agricultural Technology and Equipment, 2014(5): 19-25.
[5] 尹选春, 兰玉彬, 文晟, 等. 日本农业航空技术发展及对我国的启示[J]. 华南农业大学学报, 2018, 39(02): 1-8.
Yin X, Lan Y, Wen S, et al. The development of Japan agricultural aviation technology and its enlightenment for China[J]. Journal of South China Agricultural University, 2008, 39(02): 1-8.
[6] Gu K, Xing M, Ri G. Evapotranspiration estimate in microscale at Onigi rice terraces using UAV[J]. Research Report of Engineering Research Department of University of Nagasaki, 2018, 48.
[7] 高林, 杨贵军, 于海洋, 等. 基于无人机高光谱遥感的冬小麦叶面积指数反演[J]. 农业工程学报, 2016, 32(22): 113-120.
Gao L, Yang G, Yu H, et al. Retrieving winter wheat leaf area index based on unmanned aerial vehicle hyperspectral remote sensing[J]. Transactions of the CSAE, 2016, 32(22): 113-120.
[8] 劉建刚, 赵春江, 杨贵军, 等. 无人机遥感解析田间作物表型信息研究进展[J]. 农业工程学报, 2016, 32(24): 98-106.
Liu J, Zhao C, Yang G, et al. Review of field-based phenotyping by unmanned aerial vehicle remote sensing platform[J]. Transactions of the CSAE, 2016, 32(24): 98-106.
[9] Yue J, Feng H, Yang G, et al. A comparison of regression techniques for estimation of above-ground winter wheat biomass using near-surface spectroscopy[J]. Remote Sensing, 2018, 10(1): 66.
[10] 高林, 杨贵军, 李红军, 等. 基于无人机数码影像的冬小麦叶面积指数探测研究[J]. 中国生态农业学报, 2016, 24(9): 1254-1264.
Gao L, Yang G, Li H, et al. Winter wheat LAI estimation using unmanned aerial vehicle RGB-imaging[J]. Chinese Journal of Eco-Agriculture, 2016, 24(9): 1254-1264.
[11] Patrick A, Pelham S, Culbreath A, et al. High throughput phenotyping of tomato spot wilt disease in peanuts using unmanned aerial systems and multispectral imaging[J]. IEEE Instrumentation & Measurement Magazine, 2017, 20(3): 4-12.
[12] Albetis J, Duthoit S, Guttler F, et al. Detection of Flavescence dorée Grapevine disease using unmanned aerial vehicle (UAV) multispectral imagery[J]. Remote Sensing, 2017, 9(4): 308.
[13] Torres-San J, La3Pez-Granados F, De Castro A I, et al. Configuration and specifications of an unmanned aerial vehicle (UAV) for early site specific weed management[J]. PLoS One, 2013, 8(3): e58210.
[14] Kussul N , Lavreniuk M , Skakun S , et al. Deep learning classification of land cover and crop types using remote sensing data[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(5): 778-782.
[15] Chen S W , Shivakumar S S , Dcunha S , et al. Counting apples and oranges with deep learning: a data-driven approach[J]. IEEE Robotics and Automation Letters, 2017, 2(2): 781-788.
[16] 孫钰, 周焱, 袁明帅, 等. 基于深度学习的森林虫害无人机实时监测方法[J]. 农业工程学报, 2018, 34(21): 82-89.
Sun Y, Zhou Y, Yuan M, et al. UAV real-time monitoring for forest pest based on deep learning[J]. Transactions of the CSAE, 2018, 34(21): 82-89.
[17] Zhu H, Yuen K V, Mihaylova L, et al. Overview of environment perception for intelligent vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(10): 2584-2601.
[18] Xu M, Tang Q, Cen L, et al. Research on relative height measurement based on multi-sensor fusion technology[C]. In: 2nd Proceedings of Frontiers of Sensors Technologies (ICFST), 2017 2nd International Conference on. 14-16 April 2017. Shenzhen, China.
[19] Pierzcha a M, Giguère P, Astrup R. Mapping forests using an unmanned ground vehicle with 3D LiDAR and graph-SLAM[J]. Computers and Electronics in Agriculture, 2018, 145: 217-225.
[20] Gee T, James J, Mark W V D, et al. Lidar guided stereo simultaneous localization and mapping (SLAM) for UAV outdoor 3-D scene reconstruction[C]. International Conference on Image and Vision Computing New Zealand. IEEE, 2017: 1-6.
[21] Fink G K. Observer design for visual inertial SLAM scale on a quadrotor UAV[C]. International Conference on Unmanned Aircraft Systems. 2017.
[22] Shinohara T, Namerikawa T. SLAM for a small UAV with compensation for unordinary observations and convergence analysis[C]. Society of Instrument and Control Engineers of Japan. IEEE, 2016: 1252-1257.
[23] Hewitt R A, Marshall J A. Towards intensity-augmented SLAM with LiDAR and ToF sensors[C]//International Conference on Intelligent Robots and Systems. IEEE, 2016: 1956-1961.
[24] Habibie N, Nugraha A M, Anshori A Z, et al. Fruit mapping mobile robot on simulated agricultural area in Gazebo simulator using simultaneous localization and mapping SLAM)[C]. International Symposium on Micro-Nanomechatronics and Human Science. 2017: 1-7.
[25] Trujillo J C, Munguia R, Guerra E, et al. Cooperative monocular-based SLAM for multi-UAV systems in GPS-denied environments [J]. Sensors, 2017, 1(10): 737.
[26] Schmuck P, Chli M. Multi-UAV collaborative monocular SLAM[C]. IEEE International Conference on Robotics and Automation. IEEE, 2017: 3863-3870.
[27] Hewitt A J, Johnson D R, Fish J D, et al. Development of the spray drift task force database for aerial applications[J]. Environmental Toxicology & Chemistry, 2002, 21(3): 648-658.
[28] Zhang S, Xue X, Sun Z, et al. Downwash distribution of single-rotor unmanned agricultural helicopter on hovering state[J]. International Journal of Agricultural & Biological Engineering, 2017, 10(5): 14-24.
[29] Chen S, Lan Y, Li J, et al. Effect of wind field below unmanned helicopter on droplet deposition distribution of aerial spraying[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(3): 67-77.
[30] Teske M E, Thistle H W, Schou W C, et al. A review of computer models for pesticide deposition prediction[J]. Transactions of the ASABE, 2011, 54(3): 789-801.
[31] Zhang B, Tang Q, Chen L, et al. Numerical simulation of spray drift and deposition from a crop spraying aircraft using a CFD approach[J]. Biosystems Engineering, 2018, 166: 184-199.
[32] Zhang B, Tang Q, Chen L, et al. Numerical simulation of wake vortices of crop spraying aircraft close to the ground[J]. Biosystems Engineering, 2016, 145: 52-64.
[33] Lakshminarayan V K, Kalra T S, Baeder J D. Detailed computational investigation of a hovering microscale rotor in ground effect[J]. AIAA Journal, 2013, 51(4): 893-909.
[34] Anthony L, Steven A. Break-up of sprayed emulsions from flat-fan nozzles using a hole kinematics model[J]. Biosystems Engineering, 2018, 169: 104-114.
[35] Faial B S, Freitas H, Gomes P H, et al. An adaptive approach for UAV-based pesticide spraying in dynamic environments[J]. Computers and Electronics in Agriculture, 2017, 138(C): 210-223.
[36] Lakshminarayan V K, Kalra T S, Baeder J D. Detailed computational investigation of a hovering microscale rotor in ground effect[J]. AIAA Journal, 2013, 51(4): 893-909.
[37] Yang F, Xue X, Zhang L, et al. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(4): 41-53.
[38] 秦維彩. 单旋翼植保无人机喷雾参数优化研究[D]. 镇江:江苏大学, 2017.
Qin W. Research on spraying optimization for single-rotor plant protection UAV [D]. Zhenjiang: Jiangsu University, 2017.
[39] 王大帅, 张俊雄, 李伟, 等. 植保无人机动态变量施药系统设计与试验[J]. 农业机械学报, 2017, 48(5): 86-93.
Wang D, Zhang J, Li W, et al. Design and test of dynamic variable spraying system of plant protection UAV[J]. Transactions of the CSAM, 2017, 48(5): 86-93.
[40] 王昌陵, 宋坚利, 何雄奎, 等. 植保无人机飞行参数对施药雾滴沉积分布特性的影响[J]. 农业工程学报, 2017, 33(23): 109-116.
Wang C, Song J, He X, et al. Effect of flight parameters on distribution characteristics of pesticide spraying droplets deposition of plant-protection unmanned aerial vehicle[J]. Transactions of the CSAE, 2017, 33(23):
109-116.
[41] 王玲. 多旋翼植保無人机低空雾滴沉积规律及变量喷施测控技术[D]. 北京:中国农业大学, 2017.
Wang L. Research on low-altitude droplets deposition rule and technology of variable spraying measurement and control system based on multi-rotor crop protection UAV[D]. Beijing: China Agricultural University, 2017.
[42] 王玲, 兰玉彬, Hoffmann W C, 等. 微型无人机低空变量喷药系统设计与雾滴沉积规律研究[J]. 农业机械学报, 2016, 47(1): 15-22.
Wang L, Lan Y, Hoffmann W C, et al. Design of variable spraying system and influencing factors on droplets deposition of small UAV[J]. Transactions of the CSAM,
2016, 47(1): 15-22.
[43] 茹煜, 金兰, 周宏平, 等. 航空施药旋转液力雾化喷头性能试验[J]. 农业工程学报, 2014, 30(3): 50-55.
Ru Y, Jin L, Zhou H, et al. Performance experiment of rotary hydraulic atomizing nozzle for aerial spraying application[J]. Transactions of the CSAE, 2014, 30(3):
50-55.
[44] 樊荣, 杨福增. 植保常用扇形雾喷头系列型谱模型研究[J]. 山西农业大学学报(自然科学版), 2016, 36(7): 524-528.
Fan R, Yang F. The research on series spectrum model of fan-spray nozzle in plant protection[J]. Journal of Shanxi Agricultural University (Natural Science Edition), 2016, 36(7): 524-528.
[45] 刘武兰, 周志艳, 陈盛德, 等. 航空静电喷雾技术现状及其在植保无人机中应用的思考[J]. 农机化研究, 2018, 40(5): 1-9.
Liu W, Zhou Z, Chen S, et al. Status of aerial electrostatic spraying technology and its application in plant protection UAV[J]. Journal of Agricultural Mechanization Research, 2018, 40(5): 1-9.
[46] 王士林, 何雄奎, 宋坚利, 等. 双极性接触式航空机载静电喷雾系统荷电与喷雾效果试验[J]. 农业工程学报, 2018, 34(7): 82-89.
Wang S, He X, Song J, et al. Charging and spraying performance test of bipolar contact electrostatic spraying system for unmanned aerial vehicle [J]. Transactions of the CSAE, 2018, 34(7): 82-89.
[47] Daggupati N P. Assessment of the varitarget nozzle for variable rate application of liquid crop protection products[D]. India: ANGR Agricultural University, 2007.
[48] Funseth T G, Mercer D S, Humpal R A. Sprayer pulsing nozzle flow control using rotational step positions[P]. US, 2014. http://www. faqs. org /patents /app
[49] Yu X, Roppel T A, Hung J Y. An optimization approach for planning robotic field coverage[C]. IECON 2015, Conference of the IEEE Industrial Electronics Society. IEEE, 2015: 004032-004039.
[50] Pham T H, Bestaoui Y, Mammar S. Aerial robot coverage path planning approach with concave obstacles in precision agriculture[C]. The Workshop on Research. 2017: 43-48.
[51] 尧李慧, 蔡晓华, 田雷, 等. 自走式智能牛舍清洁机器人路径设计与研究[J]. 农机化研究, 2018, 40(1): 51-56.
Yao L, Cai X, Tian L, et al. Design and research of automatic barn cleaner path planning[J]. Journal of Agricultural Mechanization Research, 2018, 40(1): 51-56.
[52] Cai Z, Li S, Gan Y, et al. Research on complete coverage path planning algorithms based on A* algorithms[J]. Open Cybernetics & Systemics Journal, 2014, 8(1): 418-426.
[53] 徐博, 陈立平, 谭彧, 等. 基于无人机航向的不规则区域作业航线规划算法与验证[J]. 农业工程学报, 2015(23): 173-178.
Xu B, Chen L, Tan Y, et al. Route planning algorithm and verification based on UAV operation path angle in irregular area [J]. Transactions of the CSAE, 2015(23):
173-178.
[54] 王宇, 陈海涛, 李煜, 等. 基于Grid-GSA算法的植保无人机路径规划方法[J]. 农业机械学报, 2017, 48(7): 29-37.
Wang Y, Chen H, Li Y, et al. Path planning method based on grid-GSA for plant protection UAV[J]. Transactions of the CSAM, 2017, 48(7): 29-37.
[55] 徐博. 植保无人机航线规划方法研究[D]. 北京: 中国农业大学, 2017.
Xu B. Research on route planning for plant protection unmanned aerial vehicles[D]. Beijing: China Agricultural University, 2017.
[56] Luo H, Niu Y, Zhu M, et al. Optimization of pesticide spraying tasks via multi-UAVs using genetic algorithm[J]. Mathematical Problems in Engineering, 2017, 2017: 7139157, 1-16.
[57] Franz E, Bouse L F, Carlton J B, et al. Aerial spray deposit relations with plant canopy and weather parameters[J]. Transactions of the ASABE, 1998, 41(4): 959-966.
[58] 张瑞瑞, 文瑶, 伊铜川, 等. 航空施药雾滴沉积特性光谱分析检测系统研发与应用[J]. 农业工程学报, 2017, 33(24): 80-87.
Zhang R, Wen Y, Yi T, et al. Development and application of aerial spray droplets deposition performance measurement system based on spectral analysis technology[J]. Transactions of the CSAE, 2017, 33(24): 80-87.
[59] 張东彦, 兰玉彬, 王秀, 等. 基于中分辨卫星影像的农用航空喷药效果评估[J]. 光谱学与光谱分析, 2016, 36 (6): 1971-1977.
Zhang D, Lan Y, Wang X, et al. Assessment of Aerial agrichemical spraying effect using moderate-resolution satellite imagery[J]. Spectroscopy and Spectral Analysis, 2016, 36 (6): 1971-1977.
[60] 张瑞瑞, 陈立平, 兰玉彬, 等. 航空施药中雾滴沉积传感器系统设计与实验[J]. 农业机械学报, 2014, 45(8):123-127.
Zhang R, Chen L, Lan Y, et al. Development of a deposit sensing system for aerial spraying application[J]. Transactions of the CSAM, 2014, 45(8):123-127.
[61] 吳超琼, 赵利, 梁钢, 等. 基于北斗导航系统的无人机飞行监管系统设计[J]. 测控技术, 2017, 36(8): 66-69.
Wu C, Zhao L, Liang G, et al. Design of UAV flight supervision system based on Beidou navigation system [J]. Measurement & Control Technology, 2017, 36(8): 66-69.
[62] Cambra C, Sendra S, Lloret J, et al. An IoT service-oriented system for agriculture monitoring[C]. IEEE International Conference on Communications. IEEE, 2017: 1-6.
Key technology analysis and research progress of UAV intelligent plant protection
Min Xu1,2, Ruirui Zhang1,2, Liping Chen1,2*, Qing Tang1,2, Gang Xu1,2
(1. National Research Center of Intelligent Equipment for Agriculture, Beijing 100097, China;
2. Beijing Research Center for Intelligent Agricultural Equipment, Beijing 100097, China)
Abstract: UAV plant protection operation faces very complicated environmental conditions. On one hand, its ultra low altitude operations are vulnerable to ground structures and basic hydropower facilities; on the other hand, the effectiveness of plant protection operation is strong, and it is necessary to spray the pesticides to the specific parts of crops at the prescribed time so as to ensure good pesticide application effect. At present, UAV plant protection technology mainly refers to the existing mature technology and flight platform in general aviation field to basically "fly and spray". However, the lack of penetrating research and theoretical guidance on environmental perception in farmland operation, the movement mechanism of droplets under the rotor airflow, and the penetrability of the droplet to different crops canopy lead to low penetration rate of the UAV plant protection operation, easy drifting, frequent accidents, large damage probability and low comprehensive operational efficiency. Benefiting from the breakthroughs in artificial intelligence, parallel computing technology and intelligent hardware, the UAV plant protection technology is developing in the direction of intellectualization, systematization and precision. The real-time perception of the environment under non established conditions, intelligent job decision method based on intelligent recognition of crop diseases and pests, the control of the toward-target pesticide spraying control based on the variable of wind field droplet deposition model and the data based job evaluation system have gradually become the key technology of the UAV intelligent plant protection. The manuscript analyzed and summarized the research status and technical achievements in the field of UAV intelligent plant protection from the field information perception, the modeling and optimization control of accurate pesticide application, the evaluation and monitoring of the operation effect. Based on the existing research, the research also predicted the development trend of the key technologies of intelligent UAV plant protection in the future. The clustering method of hyper-spectral image acquisition and computational intelligence based deep learning recognition will become the key technology for real-time and efficient acquisition of crop target information in plant protection work, which greatly improves the accuracy of remote sensing information inversion recognition; machine vision and multi machine cooperative sensing technology can acquire dynamic information of field operation at multiple levels and time; the high precision droplet spectrum control technology independently controlled by nozzle design and the precision variable spraying control technology based on the wind field model can further improve the droplet deposition effect and reduce the liquid drifting; the breakthrough of high accuracy mesh solution technology will change the prediction mode of droplet drift from artificial experience judgment to computer simulation and numerical deduction; the job path planning technology will greatly improve the efficiency of multi machine and multi area operation and reduce the distance of invalid operation; the job quality evaluation based on the real-time data of the sensor and the operation supervision system of large data technology will replace people to effectively control the process of the UAV plant protection operation, achieve data and transparency of plant protection, and ensure the process is observable and controllable.
Key words: UAV; plant protection; intelligence; sensing; spraying
猜你喜欢
中国品牌(2020年4期)2020-11-16
科学种养(2019年1期)2019-02-21
农村百事通(2018年14期)2018-10-31
读与写·教育教学版(2016年12期)2016-12-23
小学教学参考(综合)(2016年7期)2016-12-22
散文百家·下旬刊(2016年9期)2016-11-23
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
山东农药信息(2013年7期)2013-08-16
读与写·教育教学版(2016年12期)2007-12-26