9YG-1.2 型圆捆机捡拾装置参数优化研究
2019-09-02 09:46:46贺占清郭志平李瑞平李凤伟董忠义陈梦颖
饲料工业 2019年15期
■贺占清 郭志平* 李瑞平 李凤伟 杨 莉 董忠义 陈梦颖
(1.内蒙古工业大学机械学院,内蒙古呼和浩特010000;2.中国农业机械化科学研究院呼和浩特分院,内蒙古呼和浩特010000;3.内蒙古华德牧草机械有限责任公司,内蒙古呼伦贝尔021000;4.内蒙古科技大学包头医学院,内蒙古包头014000)
畜牧业作为我国内蒙古地区重要经济来源,在农 村经济中扮演重要角色。牧草是畜牧业最重要的物质基础,其高效低损收获是牧草收获工作最重要的环节。圆捆卷捆机作为现代化牧草收获的重要工具之一,可以实现对牧草的自动捡拾、自动卷捆和自动捆制等工作,增加牧草收获自动化水平,减轻牧草收获工作量,缩短牧草收获周期,提高牧草收获质量。而现阶段我国牧草收获机械还大多为引进或仿制国外先进装备,对牧草收获机械工作原理及收获装备优化还处于较低水平。如图1 为中国农机院呼和浩特特分院研制的9YG-1.2 型圆捆机,其主要由捡拾装置,喂入装置,卷捆装置,捆绳装置等组成,实现牧草卷制圆捆工作,其卷制草捆内松外紧,有利于草捆的通风干燥,提高牧草的存储时间。在实施卷捆工作时发现圆捆机捡拾装置在捡拾牧草时出现漏捡和打击花叶等问题。为提高9YG-1.2 型圆捆机捡拾装置的捡拾质量,通过ADAMS 多体动力学仿真软件对捡拾装置各部件结构及运动参数进行分析研究,探究各参数对漏检率及花叶损失率的影响,以捡拾装置低漏捡率和低花叶损失率为目标对多个参数进行参数配比优化,找到低漏捡率和低花叶损失率的最优参数组合,为我国现有牧草收获装备捡拾装置的优化提供理论支撑,提高我国牧草捡拾装置的捡拾质量,提高牧草收获效率,促进畜牧业的高效高质量发展。
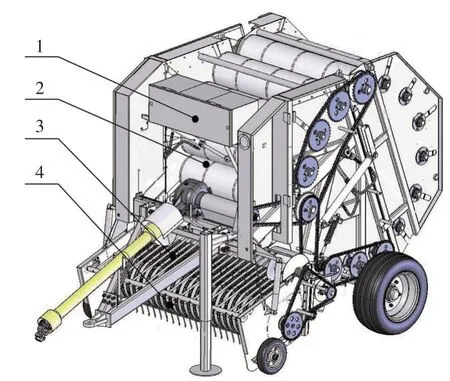
图1 9YG-1.2型圆捆机
1 捡拾装置理论分析
捡拾装置作为圆捆机重要部件主要作用是将地面上已经搂集成条的牧草捡拾并喂入后续卷捆工作机构中,捡拾装置的捡拾质量及效率直接影响牧草的收获。在对9YG-1.2型圆捆机卷捆试验时发现,捡拾装置在捡拾牧草时出现牧草漏捡及牧草被弹齿打碎等现象。为提高捡拾装置的捡拾质量,对捡拾装置进行理论分析,分析影响捡拾装置捡拾质量的因素,为捡拾装置的优化提供理论分析。
1.1 捡拾机构工作原理
9YG-1.2 型圆捆机的捡拾装置采用弹齿滚筒式捡拾机构,如图2。捡拾装置主要由弹齿、滚筒、凸轮、曲柄、滚子、弹齿杆等组成。圆捆机工作时,捡拾装置整体安装在圆捆机前段随圆捆机一同前进,同时自身通过动力传动进行牧草的捡拾工作。
圆捆机通过链传动形式将动力传递至捡拾装置,捡拾装置中滚筒做匀速转动带动弹齿杆绕中轴做匀速转动,弹齿安装在弹齿杆上随之运动,同时弹齿杆也与曲柄固定并呈一定角度,曲柄另一端与凸轮配合沿凸轮轮廓运动。最终滚筒运动与曲柄沿凸轮运动两个运动合成弹齿的运动,从而实现捡拾装置的牧草捡拾工作。工作过程中,滚筒旋转一周为弹齿的一个工作周期,一个工作周期主要分为以下三个工作阶段:
①放齿阶段:放齿阶段是弹齿完成上一个工作周期并准备进行下一个工作周期的过程。首先弹齿运动到捡拾位置,逐渐将弹齿伸出滚筒护板并插入牧草草条内,当弹齿伸出量达到最长并开始向上运动时放齿动作完成并开始下一阶段。
②升运阶段:升运阶段是牧草捡拾工作中最重要的环节,主要是弹齿托运牧草至指定位置的过程。升运阶段弹齿的状态直接决定牧草捡拾效果的好坏,弹齿的速度及加速度的变化对牧草的漏捡及花叶损失影响很大。
③收齿阶段:收齿阶段是整个捡拾工作的最后工作。此工作阶段主要为保证在升运阶段捡拾的牧草能够顺利与弹齿分离并被推送至喂入机构。收齿阶段必须保证弹齿对牧草的作用力方向与牧草运动方向相同,避免作用力方向偏移使得牧草进入滚筒护板内或被打飞等现象发生。
1.2 捡拾质量影响因素分析
捡拾装置的捡拾质量主要可以分为两方面进行考虑,一方面由于捡拾装置结构特点使得捡拾装置在捡拾牧草过程中产生捡拾弹齿无法触及到的漏捡区,捡拾装置出现漏检率,如图3 所示,捡拾装置的漏捡区域主要是两个相邻弹齿在工作过程中弹齿都未捡拾到的区域。另一方面由于捡拾装置运动参数设置不合理可能导致捡拾弹齿对牧草作用力太大,导致牧草在捡拾过程中受到破坏。捡拾水分大的牧草可能导致花叶破碎使得牧草营养大量流失降低牧草质量;捡拾干牧草使得牧草受冲击破碎无法捡拾,降低牧草收获量。所以捡拾装置捡拾弹齿的加速在捡拾工作过程中需要控制不易过高。
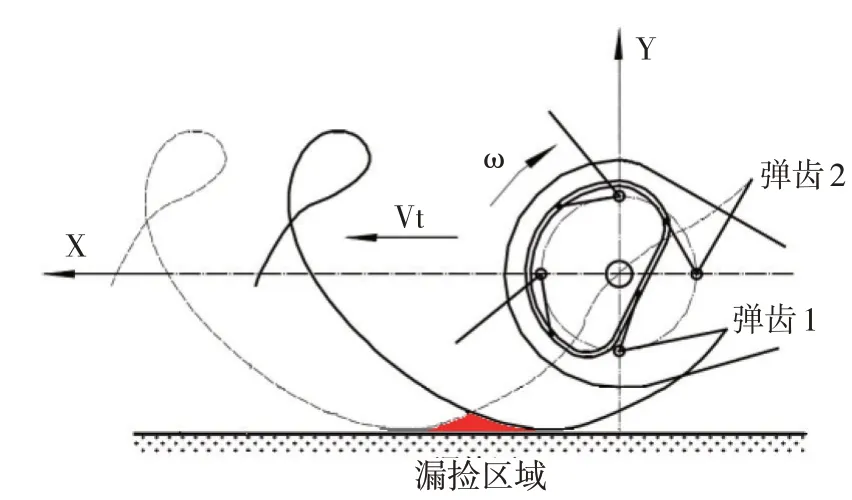
图3 弹齿滚筒式捡拾装置漏捡区
2 捡拾机构仿真分析
经上述分析,对现有9YG-1.2型圆捆机捡拾装置的各参数进行建模分析,运用多体动力学仿真软件ADAMS对各参数下捡拾装置的运动状态进行仿真模拟。从捡拾质量入手,研究分析捡拾装置结构参数及运动参数对捡拾装置中捡拾弹齿运动轨迹及捡拾弹齿加速度曲线的影响关系,从而分析各参数对漏检率及花叶损失率的影响。
2.1 各参数对捡拾弹齿位移轨迹影响分析
分析采用单因素水平分析法对捡拾装置中滚筒转速、圆捆机前进速度、滚筒半径、曲柄与弹齿夹角、滚子半径和曲柄长度进行仿真分析,分析各单因素对捡拾弹齿端点处运动轨迹的影响。如图4 为各参数下弹齿运动轨迹图。

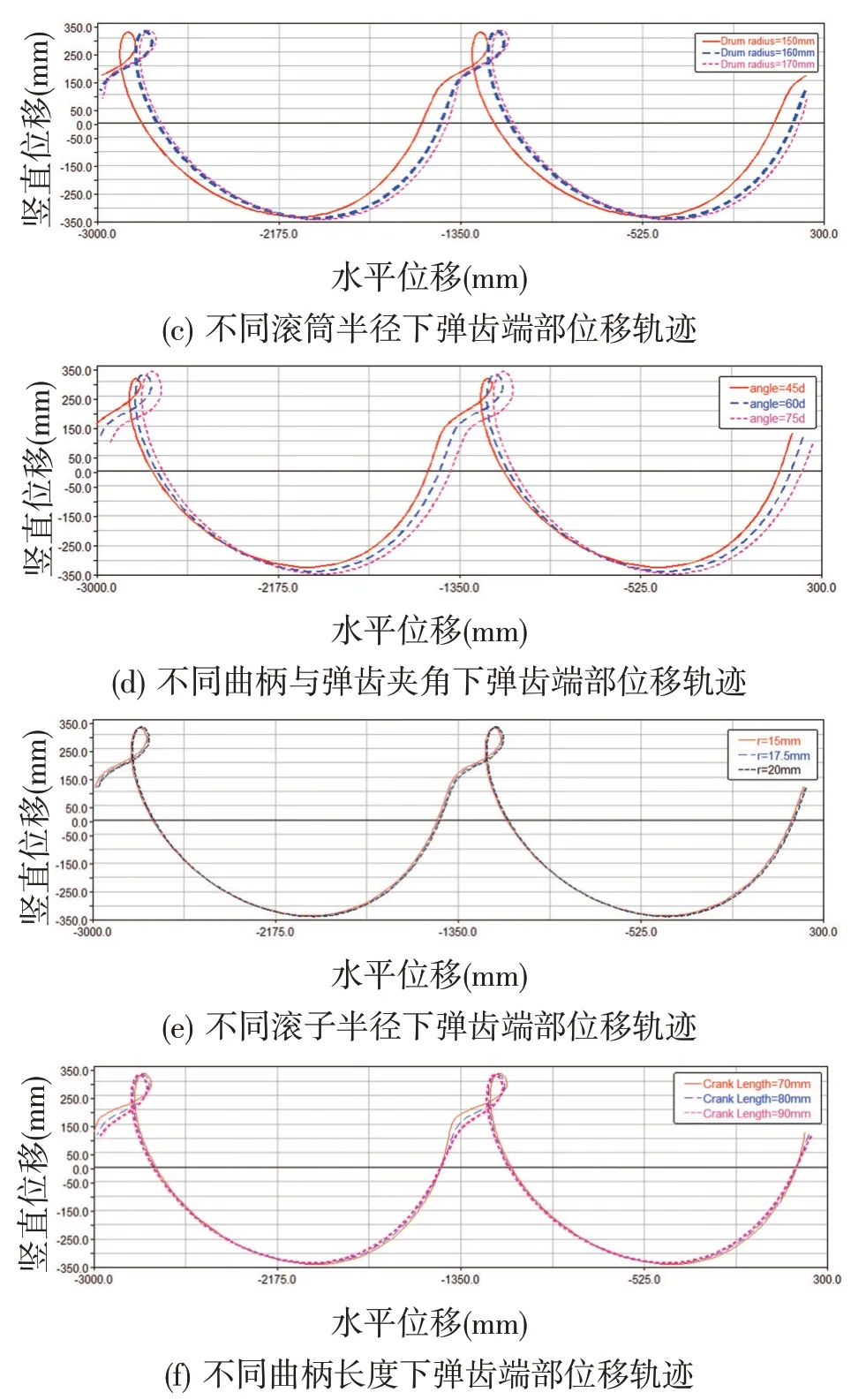
图4 各参数下弹齿端部位移轨迹
图4a为捡拾装置在滚筒转速单因素影响下捡拾弹齿端点处的位移轨迹曲线,设置滚筒转速分别为60、70、80 r/min,由图中可知捡拾弹齿端点处的位移曲线呈摆线状,随滚筒转速的增大,摆线环扣增大;λ值越大,位移轨迹曲线降低,漏捡面积减小。
图4b为捡拾装置在圆捆机前进速度单因素影响下捡拾弹齿端点处的位移轨迹曲线,设置圆捆机前进速度分别为1.2、1.4、1.6 m/s,由图中可知随圆捆机前进速度的增大,摆线环扣减小;λ值减小,位移轨迹曲线越高,漏捡面积增大。
图4c为捡拾装置在滚筒半径单因素影响下捡拾弹齿端点处的位移轨迹曲线,设置滚筒半径分别为150、160、170 mm。由图中可知随捡拾装置滚筒半径增大,捡拾弹齿端部位移轨迹摆线环扣大小变化很小,位移轨迹曲线高度相近,滚筒半径对漏捡面积影响很小。
图4d为捡拾装置在曲柄与弹齿夹角单因素影响下捡拾弹齿端点处位移轨迹曲线,设置夹角分别为45°、60°、75°。由图中可知随着捡拾机构曲柄与弹齿夹角增大,弹齿端部位移轨迹摆线环扣增大;λ值越大,位移轨迹曲线越高,漏捡面积越小。
图4e为捡拾装置在滚子半径单因素影响下捡拾弹齿端点处位移轨迹曲线,设置半径分别为15、17.5、20 mm。由图中可知滚子半径对捡拾装置弹齿端点位移轨迹并无影响。
图4f为捡拾装置在曲柄长度单因素影响下捡拾弹齿端点位移轨迹曲线,设置曲柄长度分别为70、80、90 mm。由图中可知弹齿端点处位移轨迹在不同曲柄长度下只有在摆线环扣处有所不同而对漏捡面积无明显影响。
2.2 各参数对捡拾弹齿加速度影响分析
分析同样采用单因素水平分析法对捡拾装置中滚筒转速、圆捆机前进速度、滚筒半径、曲柄与弹齿夹角、滚子半径、曲柄长度进行仿真模拟,分析单因素对捡拾弹齿端点处加速度的影响。各因素参数选择与研究各参数对漏检率影响分析时相同,如图5为各参数下弹齿端点处加速度变化。
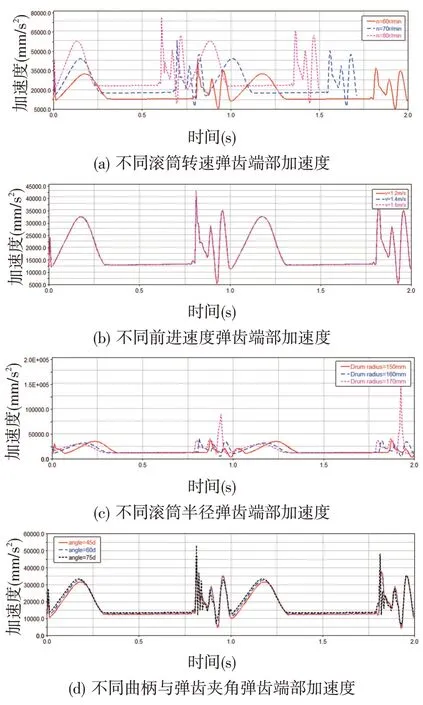
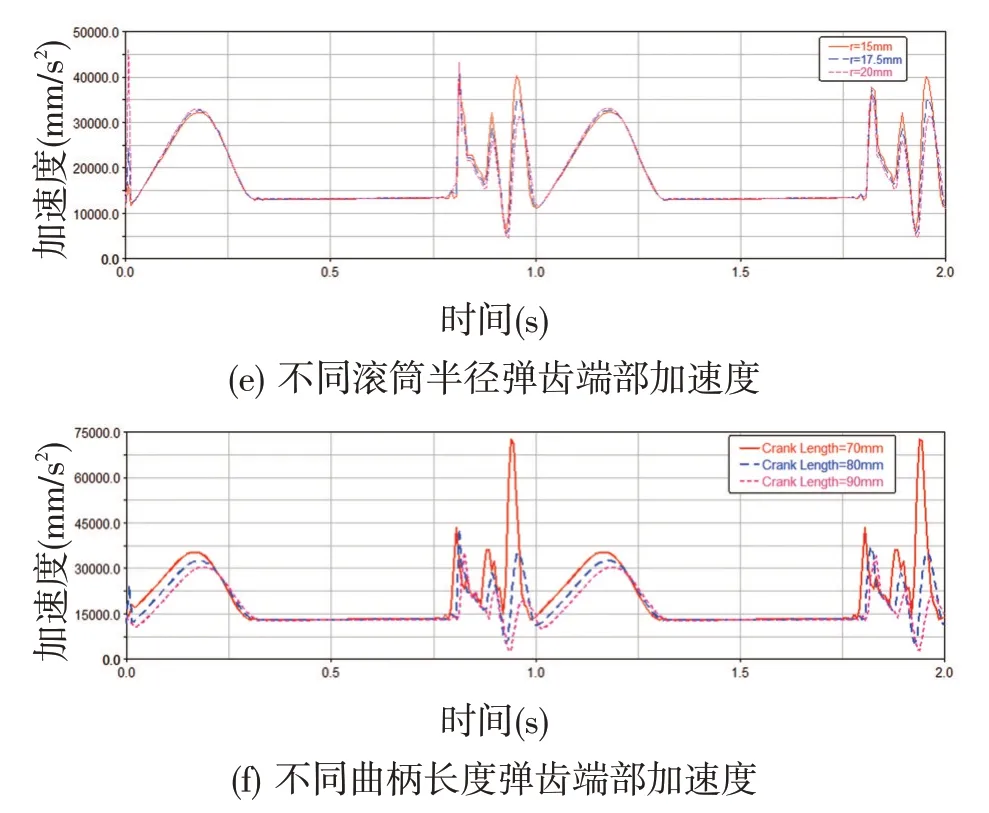
图5 各参数下弹齿端部加速度
图5a为捡拾装置在滚筒转速单因素影响下捡拾弹齿端点处的加速度变化曲线,滚筒的转速越大,捡拾装置捡拾周期缩短;单个捡拾弹齿捡拾时间缩短,弹齿端部加速度值有明显提高,加速度波动量增大,对牧草的捡拾力及对牧草的冲击力都相应增加。
图5b为捡拾装置在圆捆机前进速度单因素影响下捡拾弹齿端点处的加速度变化曲线,由图可知圆捆机前进速度对弹齿端部加速度并无影响。
图5c为捡拾装置在滚筒半径单因素影响下捡拾弹齿端点处的加速度变化曲线,由图可知滚筒半径越大加速度值有所增加,波动量也相应增加,在滚筒半径为170 mm时弹齿端部加速度曲线出现明显高于其他参数值的尖点位置,捡拾装置在捡拾牧草过程中出现对牧草的冲击作用,严重提高捡拾器捡拾牧草的花叶损失率。
图5d为捡拾装置在曲柄与弹齿夹角单因素影响下捡拾弹齿端点处加速度变化曲线,由图可知夹角越大加速度值越大;夹角增大后加速度波动量增加,花叶损失率增大。
图5e为捡拾装置在滚子半径单因素影响下捡拾弹齿端点处加速度变化曲线,由图可知出滚子半径对加速度影响不大,表现为滚子半径越大加速度越大,但增加量较小,只有在加速度波动时有增加。
图5f 为捡拾装置在曲柄长度单因素影响下捡拾弹齿端点加速度变化曲线,由图中可知曲柄长度对稳定区域加速度幅值的影响不大;但随曲柄长度的增加加速度的波动量有明显降低,对降低牧草花叶损失有重要作用。
分析各参数对捡拾装置捡拾弹齿端部位移轨迹图及加速度曲线的影响可知,捡拾装置漏检率主要受滚筒半径、圆捆机前进速度和曲柄与弹齿夹角影响,而滚筒半径、滚子半径和曲柄长度对捡拾装置漏检率影响很小。捡拾装置花叶损失率主要受滚筒转速,滚筒半径,曲柄与弹齿夹角、滚子半径和曲柄长度影响,而圆捆机前进速度对其影响较小。
3 捡拾装置参数优化
分析各参数对捡拾装置捡拾效果的影响,发现滚筒半径、滚子半径和曲柄长度对捡拾装置弹齿端点位移轨迹无明显影响,对捡拾装置漏检率影响不大,只对捡拾装置花叶损失率有影响。为减少试验次数,首先对只影响花叶损失率的参数进行仿真试验,将所得优化结果带入下一仿试验,最终对滚筒转速、圆捆机前进速度、曲柄与弹齿夹角进行参数优化。从而有效降低圆捆机捡拾装置漏捡率及花叶损失率。
3.1 仿真试验一
对曲柄长度、滚筒半径和滚子半径三个参数进行3 因素3 水平响应面分析,其他参数采用9YG-1.2 型圆捆机原有参数值,圆捆机前进速度1.4 m/s、滚筒转速70 r/min、曲柄与弹齿夹角60°。表1为试验水平与因素取值。各因素对捡拾装置捡拾弹齿加速度的影响主要表现在加速度波动区域是加速度的波动幅值,即降低加速度波动区域处加速度最大值将会明显降低捡拾装置在捡拾工作时出现的花叶损失,所以本试验以三因素影响下的弹齿加速度最大值为目标参数进行优化试验,表2为实验方案及结果。
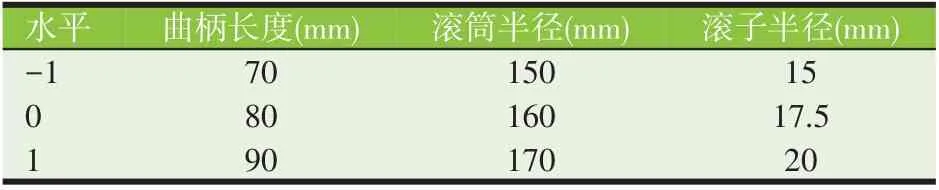
表1 试验水平与因素
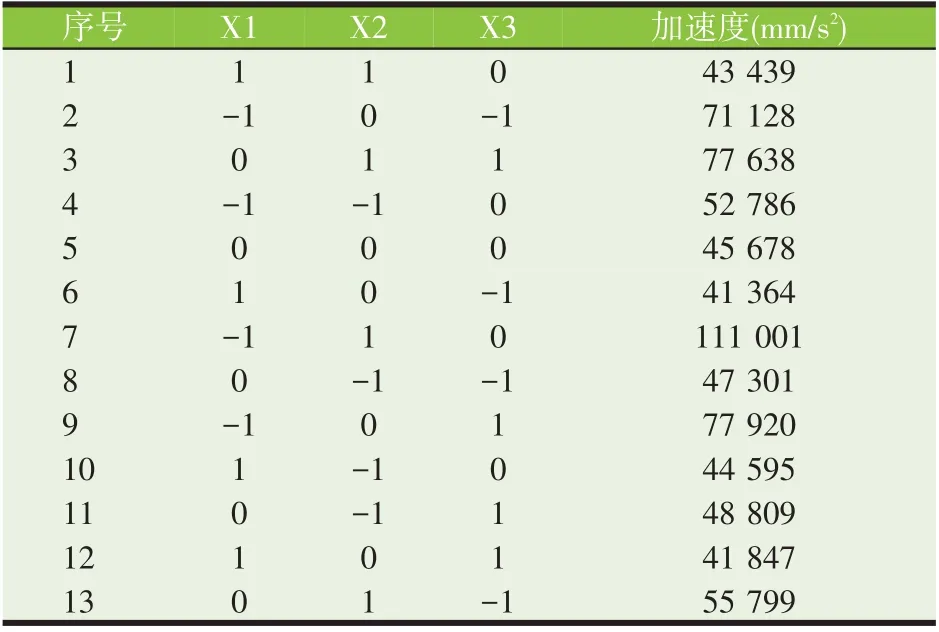
表2 实验方案及结果
通过试验软件design-expert 对各因素进行显著性分析,找出拟合回归方程。如表3 为方差分析与显著性分析,模型的AC 项和C2大于0.05,检验值不显著,其余项检验值都检验显著,其中A 项、B 项、AB 项、A2项、B2项检验检验极显著。对加速度影响的主次顺序为曲柄长度>滚筒半径>滚子半径。通过试验数据去掉拟合不显著项,得到的二次回归方程为:
Y=1.419×106+8 718.4A-17 062.7B-45 042.4C-148.43AB+203.31BC+89.78A2+82.996B2
则可求得在滚筒转速、前进速度、曲柄与弹齿夹角因素为9YG-1.2 型圆捆机原有参数时曲柄长度90 mm、滚筒半径163.5 mm和滚子半径16.1 mm可得最优结果,捡拾装置捡拾弹齿最大加速度优化为40 637 mm/s2。

表3 方差分析及显著性分析
3.2 仿真试验二
对前进速度、滚筒转速和曲柄与弹齿夹角三个参数进行3 因素3 水平响应面分析,其他参数采用试验一优化后的参数值。如表4 为试验水平与因素取值。本试验以三因素影响下的弹齿加速度最大值和捡拾装置漏检率为目标参数进行优化试验,漏捡率通过对弹齿端部位移轨迹漏捡区域测得。表5 为实验方案及结果。
通过实验软件design-expert 对各因素进行显著性分析,找出拟合回归方程。如表6为漏检率方差分析与显著性分析,模型漏捡率C12项大于0.01,检验值显著;其余项检验值都小于0.001,检验极显著。对漏捡率影响的主次顺序为机构前进速度>滚筒转速>曲柄与弹齿夹角。通过试验数据,得到的捡拾率的二次回归方程为:
L=12.071-6.505A1-0.141 9B1-0.064 6C1+0.022 4A1B1+0.015 4A1C1+0.000 46B1C1+1.684A12+0.000 499B12+1.172C12

表4 实验水平与因素
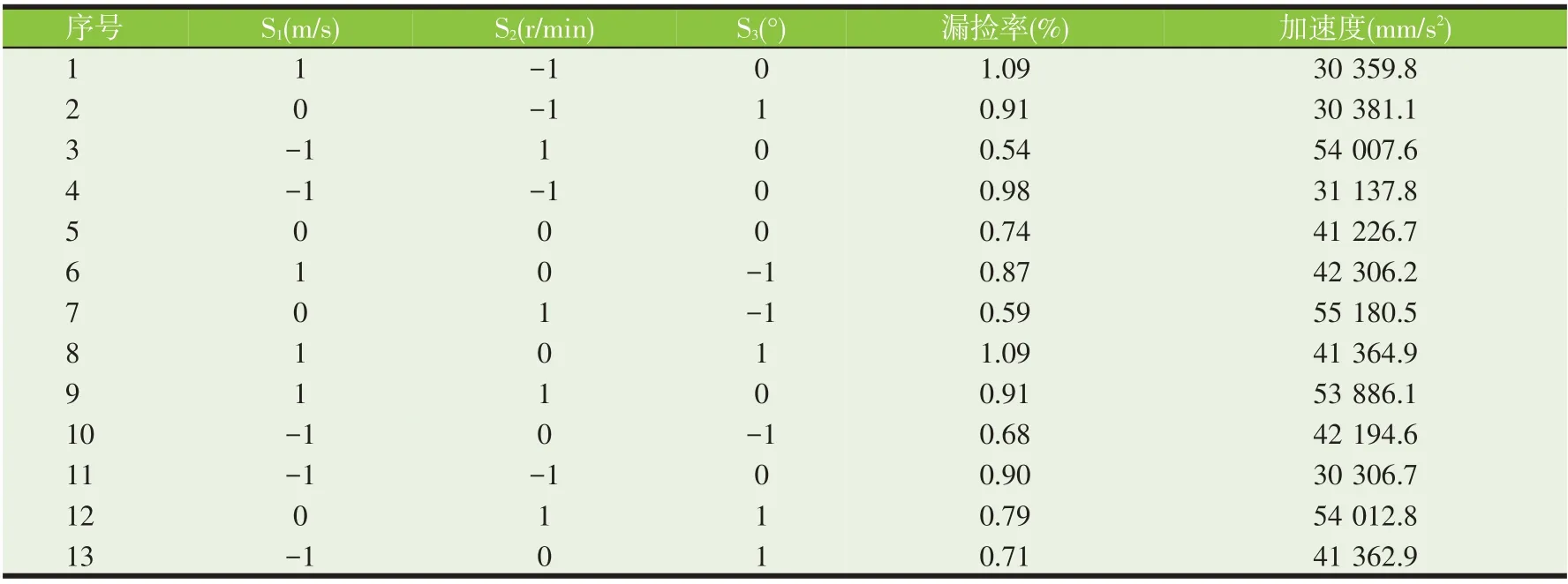
表5 实验方案及结果
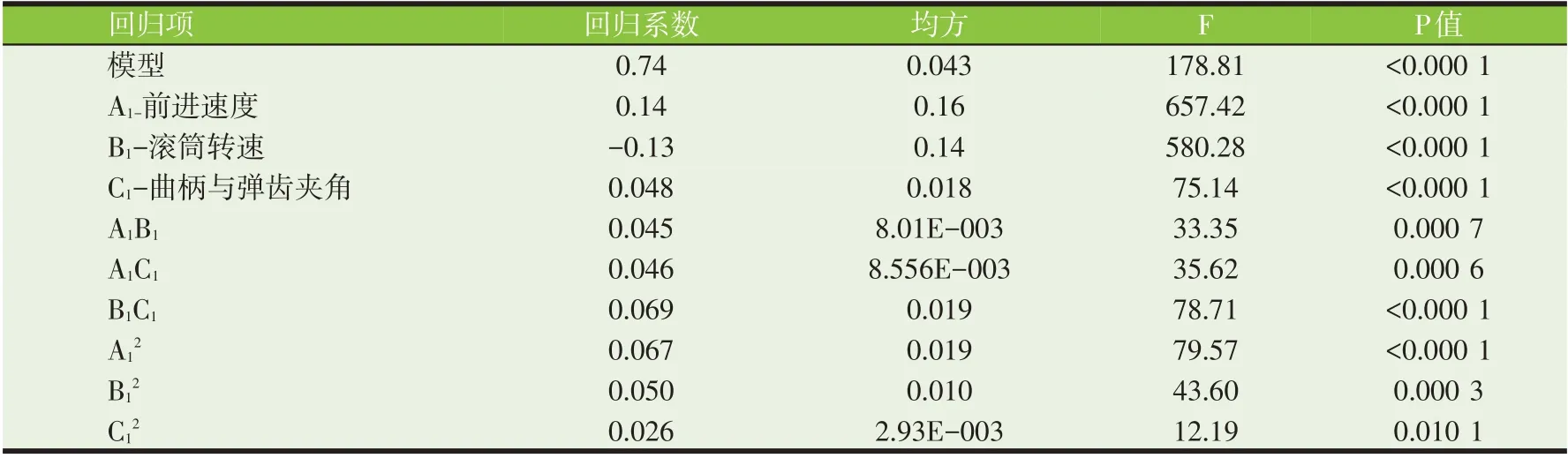
表6 漏捡率方差分析与显著性检验

表7 加速度方差分析与显著性检验
如表7为加速度方差分析与显著性分析,模型加速度A1项、A1B1项、A1C1、A12都大于0.05,这些项检验值不显著,B1C1项大于0.01,B1C1项检验值显著,其余各项的P 值均小于0.001,检验极显著。对加速度影响的主次顺序为滚筒转速>曲柄与弹齿夹角>机构前进速度。通过试验数据去除模型中不显著项,得到的加速度的二次回归方程为:
Y1=7 917.3+8.95B1-268.37C11-0.685B1C1+8.92B12+2.486C12
最终经过优化后,得到最佳参数组合:曲柄长度90 mm、滚筒半径163.5 mm、滚子半径16.1 mm、机构前进速度1.28 m/s、滚筒转速68 r/min、弹齿与曲柄的夹角50°。
3.3 优化前后性能比较分析
分析优化前后捡拾装置捡拾弹齿端点处运动轨迹和加速度变化曲线,对优化效果进行评估。图6为优化前后弹齿端部位移轨迹。相比优化前,优化后的位移轨迹周期变短、余摆线更低、漏捡高度更低、漏捡拾区域面积更小;优化前漏捡率为0.866%,而优化后漏捡率为0.677%,漏捡率优化了21.8%,优化效果显著。图7为优化前后弹齿端部加速度曲线,加速度波动量在优化后略有降低,优化前弹齿端部最大的加速度为45 678 mm/s2,而优化后弹齿端部最大的加速度为39 507.1 mm/s2,最大加速度优化了13.5%。
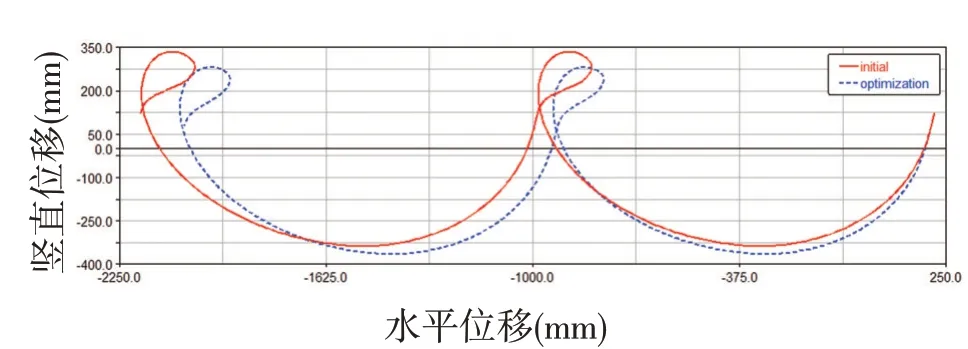
图6 优化前后弹齿端部位移轨迹
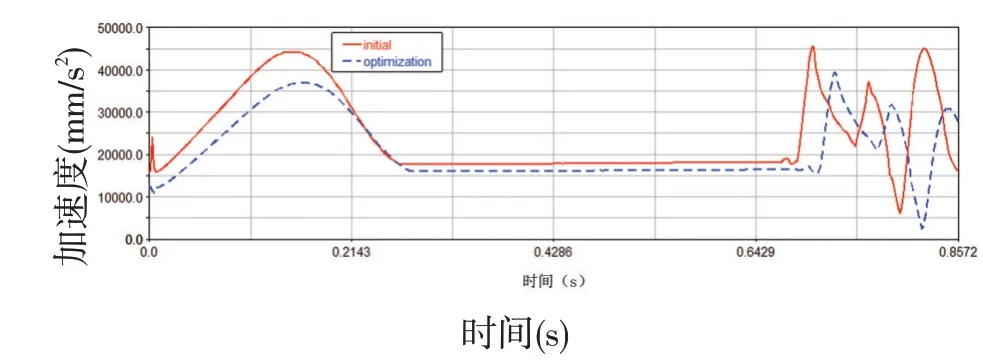
图7 优化前后弹齿端部加速度
4 结论
①分析研究9YG-1.2型圆捆机捡拾装置工作原理,对工作过程进行划分阶段性研究,探究各工作阶段内影响捡拾效果的因素,提出评估捡拾装置捡拾质量目标因素。
②运用ADAMS 多体动力学仿真软件对圆捆机捡拾装置进行仿真模拟,绘制捡拾弹齿端部位移轨迹图和加速度曲线。分析曲柄长度、滚筒半径、滚筒转速、滚子半径、圆捆机前进速度和曲柄与弹齿夹角单因素水平对捡拾装置漏检率和花叶损失率的影响。
③设计实施仿真试验研究,对多参数下捡拾装置漏捡率和花叶损失率优化分析,利用响应面分析法求得最优参数组合:曲柄长度90 mm、滚筒半径163.5 mm、滚子半径16.1 mm、机构前进速度1.28 m/s、滚筒转速68 r/min 和弹齿与曲柄的夹角50°。最优参数组合下漏捡率0.677%、最大加速度39 507.1 mm/s2,漏捡率和最大加速度分别优化了21.8%和13.5%。
猜你喜欢
幼儿教育·教育教学版(2022年10期)2022-07-04 13:55:50
林业机械与木工设备(2022年2期)2022-03-08 01:32:22
冶金设备(2021年1期)2021-06-09 09:35:28
机械工程师(2021年4期)2021-04-19 07:27:56
农业机械学报(2020年10期)2020-10-29 11:19:34
机械工程师(2020年3期)2020-03-27 06:33:36
设备管理与维修(2019年22期)2019-12-19 01:30:12
测控技术(2018年6期)2018-11-25 09:49:58
机械研究与应用(2018年5期)2018-11-05 05:59:38
农机化研究(2017年4期)2017-12-16 02:48:38