带自环的无向网络的同步研究
2019-08-08 10:19孔秀琼袁正中
闽南师范大学学报(自然科学版) 2019年3期
孔秀琼,袁正中,2,3, 蔡 萍,2,3
(1.闽南师范大学数学与统计学院,福建漳州363000;2.数字福建气象大数据研究所,福建漳州363000;3.数据科学与统计学重点实验室,福建漳州363000)
复杂网络是科学研究中的一个重要课题[1],有大量科研人员进行研究,得到了丰富研究成果,特别是网络结构[2]、网络动力学系统[3]和网络控制[4].同步是一个广泛存在的自然现象,最早由丹麦物理学家惠更斯[5]发现,到20 世纪90 年代,同步研究的重点为混沌系统的同步[6].随着复杂网络的兴起,复杂网络的同步[7]成为动力学系统的一个研究热点.我们大体可以把复杂网络的同步研究分为3 种:自同步、控制同步和同步识别.复杂网络的自同步是研究网络在同步情况下,网络的拓扑结构对同步性能的影响,包括哪种网络同步性能最好[8],如何改变网络的拓扑结构使网络同步性能最好[9]和网络结构对网络同步性能的影响[10]等.控制同步主要通过不同的控制方法使网络达到同步,例如线性反馈控制[11]、自适应控制[12]和牵制控制[13]等.同步识别是利用网络的同步识别网络的拓扑结构[14].然而,这些研究都有一个重要前提:网络都是无自环的.但是,在一般的生物网络[15]、电力网络[16]以及社会学动力系统[17]中自环是普遍存在的,对网络同步有重要影响.本文讨论具有部分自环和全自环两种情形的无向网络的同步问题,首先,利用Lyapunov 稳定性方法研究网络在部分自环和全自环网络两种情况下的同步态、同步准则和同步性能,在理论上说明自环对网络同步的作用,然后通过数值仿真验证了相关结论.
1 带自环无向网络的动力学系统
对于含N 个相同节点的网络[5-6],其中第 i 个节点的状态方程为:

1.1 部分自环网络
1.1.1 同步态
当网络节点没有全部加自环(存在σi≠1)时,如果动态网络式(1)达到同步,则变量满足

当网络达到完全同步时,xi-xj=0.此时等式(1)右端的第二项等于0,动态网络变成

显然,由于网络存在部分自环,系统(3)同步态为

1.1.2 稳定性分析
对等式(1)关于同步状态0 附近进行线性化,得到如下方程

这里 Df(0)是 f(0)关于同步状态 0 的 Jacobi(雅可比)矩阵,令,可以得到

由于矩阵 A 对称不可约以及 σ 为对角矩阵, 存在可逆矩阵 S 满足 A-σ=SΛS-1, 其中 Λ=diag是矩阵 A-σ 的特征值,且令 η=[η1,η2,…,ηN]=ξ[ξ1,ξ2,…,ξN]S.
则有

(7)式等价于

动态网络式(1)的稳定性转变成线性方程(8)的稳定性.由文献[18]可知,当存在一个常数α<0 使得是Hurwitz 稳定矩阵,并且耦合强度满足如下条件

1.2 全自环网络
对于含N 个相同节点的网络[5-6],其中第 i 个节点的状态方程为

式(10)中,各个变量代表的含义与(1)式相同.
1.2.1 同步态
当网络全加自环(σ=IN)且达到同步时,

此时等式(10)右端的第二项等于0,动态网络变成

由于耗散耦合条件,同步状态s∈Rn必为单个孤立节点的解,即这里s 的形态多种多样.所以,当网络全加自环时,系统(10)同步态不唯一.
1.2.2 稳定性分析
对状态方程式(10)关于同步状态 s 线性化,令ξi=xi-s,得到如下方程

这里 Df(s)是 f(s)关于同步状态 s 的 Jacobi(雅可比)矩阵,令 ξ[ξ1,ξ2,…,ξN],则

记 A-σ=SΛS-1为矩阵A 的Jordan 分解,这里假设 Λ 为对角矩阵,即由于网络为全自环网络,所以矩阵A-I 的特征值k=βk-1,这里 βk为矩阵 A 的特征值.再令 η=[η1,η2,…,ηN]=ξS,则有

式(15)等价于

动态网络式(10)的稳定性转变成线性方程(16)的稳定性.由于矩阵A 为不可约矩阵,其特征值为所以,矩阵 A-I 的最大特征值为-1.当存在一个常数 α<0,使得[Df(S)+αΓ]是Hurwitz 稳定矩阵,并且耦合强度满足如下条件

则带自环的动态网络式(10)能达到完全同步.
2 数值模拟
以下仿真考虑当网络在 f(x)为Lorenz 系统的同步情况,为简单起见,令Γ 是单位矩阵.所有网络的仿真以变量 x2为例,图a 至图 d 中横轴为同步时间,纵轴为状态变量 x2的值.
1) 考虑含200 个节点的BA 无标度网络(m=3)和ER 随机网络(p=0.3),耦合强度为40 时,网络的同步情况如图1 所示.

图1 BA 无标度网络和ER 随机网络的同步情况Fig.1 Synchronization of BA scaleless network and ER random network
图1 中横轴为时间,纵轴为变量 x2状态轨迹.a 为无自环BA 无标度网络,c 为无自环ER 随机网络,由于变量 x2状态轨不一致, 网络无法达到同步;b 为添加60%自环后的BA 无标度网络,d 为添加60%自环后的ER 随机网络,由于变量 x2状态轨迹都趋于0,网络达到同步状态.
2) 同等网络规模(N=200)全自环网络的拓扑结构,决定了即使耦合强度不大,网络也可以达到同步.考虑全自环的BA 无标度网络和ER 随机网络,耦合强度为28 时,网络的同步情况如图2 所示.
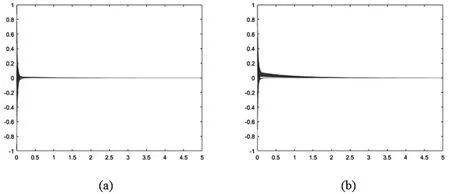
图2 全自环BA 无标度网络和ER 随机网络同步情况Fig.2 Synchronization of All-Self-Loop BA scaleless network and ER random network
图2 中横轴为时间,纵轴为变量 x2状态轨迹.a 为全自环BA 无标度网络,b 为全自环ER 随机网络,由于变量 x2状态轨迹都趋于0,网络达到同步状态.
所以,当网络的耦合强度相同时,加入不同数量的自环,可以促进网络同步;当网络为全自环网络时,给出较小的耦合强度,网络可以快速达到同步.
3 总结
本文深入研究了带自环网络的同步问题.从理论上证明了部分自环网络和全自环网络的同步状态、同步准则和同步性能,说明了自环对网络同步的促进作用.用部分自环和全自环的ER 随机网络和BA 无标度网络验证网络同步性能随着自环数目的增加而增强.
猜你喜欢
辽宁工业大学学报(自然科学版)(2022年4期)2022-09-19
网络安全与数据管理(2022年3期)2022-05-23
四川大学学报(自然科学版)(2022年1期)2022-02-10
房地产导刊(2021年12期)2021-12-31
北京航空航天大学学报(2021年9期)2021-11-02
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
四川大学学报(自然科学版)(2020年3期)2020-06-03
烟台大学学报(自然科学与工程版)(2020年1期)2020-02-08
电子制作(2019年16期)2019-09-27
计算机应用与软件(2018年12期)2018-12-13