带延时关节型云机器人内模控制器设计及应用
2019-08-05 08:34:18刘立业
石家庄职业技术学院学报 2019年4期
刘 立 业
(石家庄职业技术学院 电气与电子工程学院,河北 石家庄 050081)
0 引言
目前,全球有一百多个国家和地区在大力研发和应用机器人.机器人种类繁多,应用领域广泛,基本形成了以工业机器人应用为主,以服务机器人为辅,以教育机器人为基础的发展格局.近几年,云机器人在机器人研发领域异军突起,掀开了机器人技术应用领域的新篇章.随着生产力的不断发展,工业制造技术日趋复杂,人们对工业产品的品质要求也越来越高,工程人员对于新型智能制造技术在工业生产中应用的需求也日趋迫切.在技术不断革新的大环境下,云机器人所具有的技术优势日趋明显.
云计算技术的飞速发展和日益成熟,为大数据的处理、复杂系统的控制等难题提供了新的解决方法与思路.云机器人是把机器人在运行之前需要的模型数据与复杂的算法存储在云端,当执行任务时,机器人才与服务器相连,获得相关的控制数据与通信信息.云机器人控制系统的示意图如图1所示.
云机器人的概念是在2010 年由卡耐基梅隆大学的库夫纳教授提出的[1].云机器人的实质是云计算技术和机器人学的相互融合.云机器人技术的基本原理是将控制系统的所有数据及相关信息存到机器人本体之外,即云端,这就降低了机器人本体对控制系统的依赖度.当机器人控制系统运行时,通过云端网络服务器连接到云网络,并借助云网络的强大计算能力对控制信号进行分析和处理.云机器人技术极大地增强了机器人的学习能力和控制系统的稳定性.
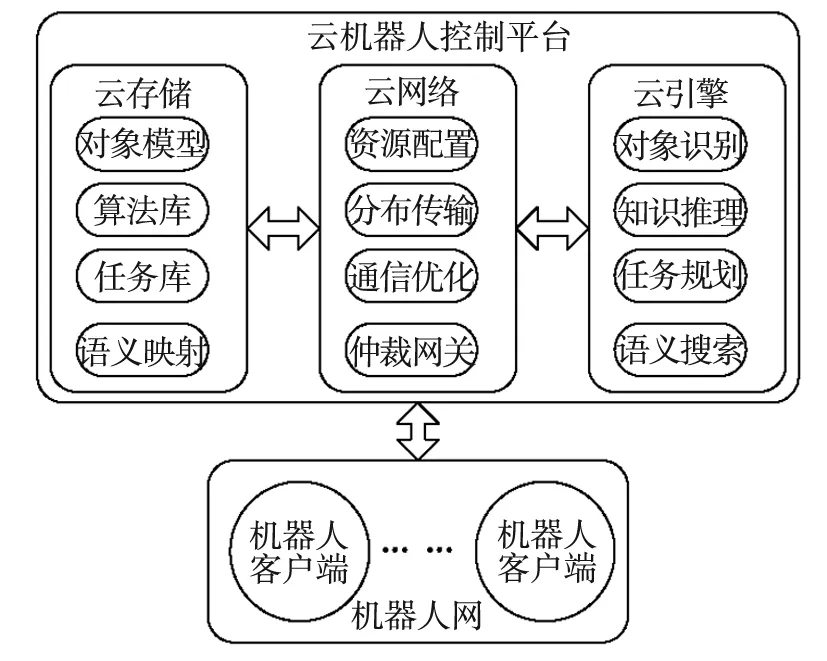
图1 云机器人系统架构示意图
云机器人技术所具有的技术优势和经济价值日趋明显,云机器人也逐步走向市场,并在环境卫生、生物医药、国防安全、空间探索等行业初显身手.这充分说明了云机器人技术的发展前景十分广阔.文献[2]研发了一款可以自主导航的座椅机器人,其原理是采用云端实时共享的相关地图数据,通过云网路向自主导航的座椅机器人提供精准的定位和导航服务,帮助行动障碍人士自主逛商场、购物,并向其提供精准的医疗卫生服务.由新加坡科技研究局(Agency for Science,Technology and Research,简称A*STAR)下属的数据存储研究所在深入研究了云计算的架构与信息处理的融合技术后,提出了一种新型的云计算架构.这种新型的云计算架构能够让机器人根据当前环境的变化,自主构建周围环境的实时三维地图[3].土耳其萨班奇大学道格马斯教授则专注于服务机器人在医疗健康领域的研究,近年来,他聚焦于云处理技术与物理医学的融合,设计了一种新型的云康复机器人,其优点是采用了一种结构化的方式表示云机器人的实时处理数据及相关信息[4].
随着国外科研机构对于云机器人的研究,国内的科研机构也开始聚焦于云机器人相关技术的研究与应用,如以北京理工大学、清华大学和浙江大学为代表的一批高校,对云机器人技术的研究目前处于国内领先水平[5-6].虽然,当前国内各科研机构、企事业单位在云机器人技术研究中取得了一些成就,但是对于云机器人相关技术的研究尚处于技术准备和应用的探索阶段,在工业机器人应用领域更是如此.
当前,国内工业机器人的销量和保有量逐年上升,但是在云工业机器人领域的技术基础研究仍相对薄弱.其中,存在于云端与机械手之间的信息传输时延是亟待解决的控制问题.大时延和时变时延给云机器人控制系统带来的影响主要体现在:机器人控制系统的不稳定和机器人循迹精度的降低上.此外,云机器人控制系统还存在环境的适应性、抗干扰能力、对时延以外其他参数摄动的鲁棒性等问题.图2为六自由度关节型机器人的关节分布图.
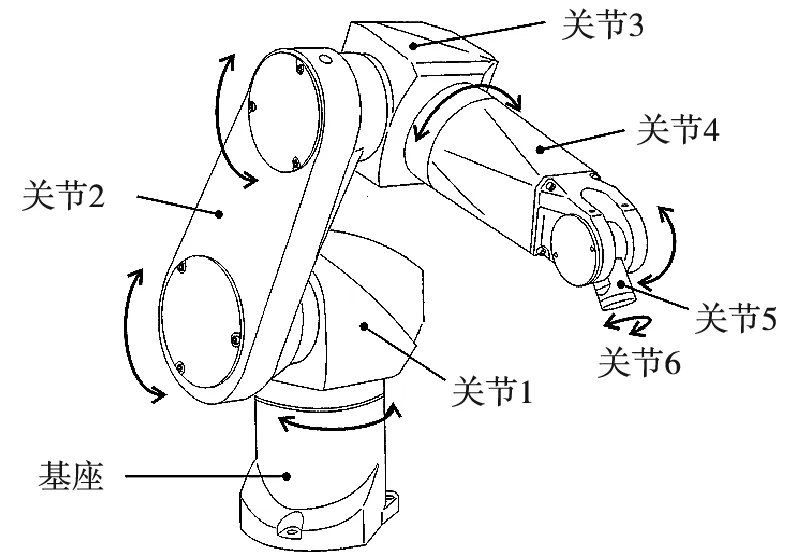
图2 六自由度关节型机器人示意图
本文将研究焦点集中于关节型云机器人个体网络控制技术方面,以关节型云机器人为基础,以云控制中的大时延问题为核心,以内模控制为手段,开展大时延背景下关节型云机器人的抗扰动内模控制策略的研究.
1 单关节云机器人内模控制器设计方法
图3为传统的内模控制系统结构示意图.
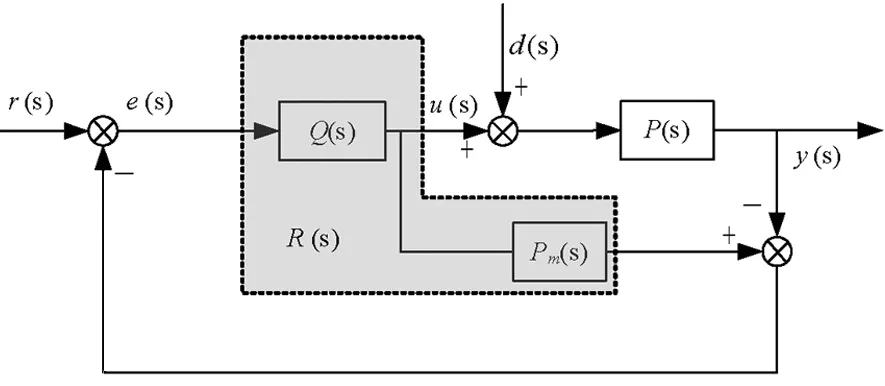
图3 内模控制系统结构示意图
内模控制的基本原理是降低控制系统对于被控模型的依赖度,增强控制系统对于系统内模扰动和干扰信息的鲁棒性,利用内模控制独特的控制结构和引入的低通滤波器来处理被控对象中的不稳定因素.关节型云机器人中的时滞正是内模控制所要处理的核心问题.
在图3中,R(s)表示等效反馈控制器,一般为可实现PID(Proportion-Integration-Differential,即比例-积分-微积)控制器;d(s)表示云机器人内部干扰输入量;u(s)表示云机器人控制系统的控制量;e(s)表示系统误差量;r(s)表示云机器人控制系统从云端采集的信号,即输入量;y(s)表示云机器人控制系统的响应输出量;s为拉普拉斯算子;Q(s)表示内模控制器;P(s)表示单关节型云机器人的被控模型[7],其模型如(1)式所示:

(1)
在公式(1)中,μ表示单关节型云机器人的增益量;T表示单关节型云机器人的惯性时间常量;ωz表示单关节型云机器人的零点响应频率;ζz表示单关节型云机器人的零点阻尼系数;ωp表示单关节型云机器人的极点响应频率;ζp表示单关节型云机器人的极点阻尼系数;τ表示单关节型云机器人的延时时间.
在图3中,Pm(s)表示单关节型云机器人的被控模型P(s)的匹配模型,其由两部分组成,如(2)式所示:
Pm(s)=Pm+(s)Pm-(s) .
(2)

由图3可以得出,控制系统的等效反馈控制器与内模控制器的关系表达式见公式(3).
(3)
当系统模型完美匹配时,即Pm(s)=P(s),可计算得出内模控制Q(s)为:
(4)
根据内模控制原理[8],为了满足控制系统的鲁棒性要求,需要在内模控制器中引入低通滤波器.

(5)
其中,低通滤波器为:
(6)
在公式(6)中,λ为低通滤波器时间常数;n为低通滤波器的阶次,n的次数要足够高,以使内模控制Q(s)保持正则,并符合控制系统的鲁棒性条件.将单关节型云机器人的被控模型公式代入到公式(5)中,可得:
(7)
则等效反馈控制器为:
(8)
采用泰勒级数展开式将公式(8)展开,可得:
(9)
其中,F(s)表示不同阶次的泰勒级数在零点的展开项.与经典的PID控制器相比较,对应系数相等.
(10)
公式(10)中KP表示比例单元系数;TI表示积分单元系数;TD表示微分单元系数.最终得到内模PID控制器与内模控制器的关系如公式(11)所示:
(11)
2 稳态性能分析
由图3可知,当被控对象完全匹配时,系统的稳态特性取决于系统的控制结构和被控对象的参数.当被控对象模型失配时,则需要量化系统的误差.系统的误差e(s)是控制系统的输入与输出的差值,即
e(s)=r(s)-y(s)=
(12)
假设控制系统的输入信号为阶跃信号,且系统的干扰信号是有界函数,低通滤波器满足

(13)
根据终值定理可知,系统的稳态误差e(∞)为0.
3 仿真示例
文献[7]给出了六自由度关节型机器人的辨识参数。本文选取第一个关节的参数作为研究对象,并假设云端的网络延迟时间τ=2,则单关节云机器人的被控模型如(14)式所示:
(14)
根据上文提到的设计过程可知,内模控制器为:
(15)
对应的内模PID控制器参数为:
(16)
在控制系统输入端施加阶跃型响应,验证所设计的内模PID控制器是否能有效地处理云机器人网络中的延迟时间问题,同时是否能提高控制系统的鲁棒性.
控制系统的阶跃型输出响应仿真图见图4-6.
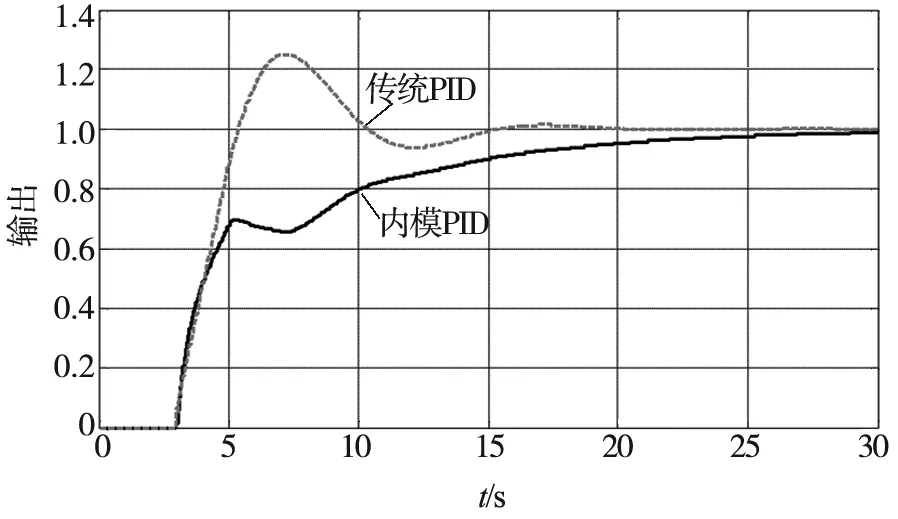
图4 相同鲁棒性条件下的阶跃响应曲线
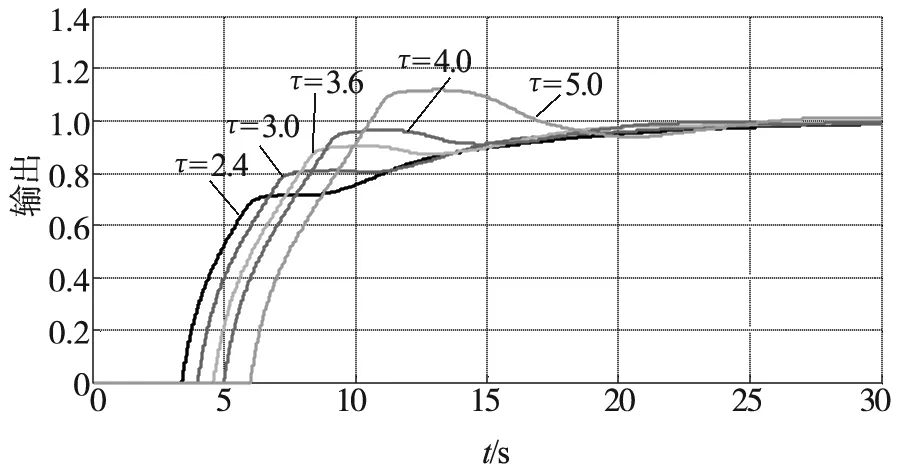
图5 不同延迟时间条件下的

图6 不同延迟时间条件下的传统PID控制阶跃响应曲线
图4反映了本文设计的内模PID控制器与传统的PID控制器在相同鲁棒性条件下的阶跃响应输出曲线的对比情况.由图4可知,在相同鲁棒性条件下,内模PID控制系统的超调量较小,系统响应时间为5 s,低于传统PID控制器的系统响应时间;虽然内模PID控制系统的运行更平稳,但并不是所有的动态指标均可达到满意值,例如内模PID控制系统的调节时间比传统PID控制器系统的调节时间长.这也符合控制器平衡整定的原理,即为了满足控制系统的某些动态性能指标,必须以牺牲其他动态性能指标为代价.
图4只是反映了两种控制系统的部分动态特性,并没有反映其在大延迟时间条件下的系统响应输出情况.为了进一步研究两种控制器在不同延迟时间条件下,控制系统的动态特性及控制系统的抗干扰性,采用分别对两种控制系统逐步增加延迟时间的方法,即延迟时间增加20%,50%,80%,100%和150%时,观察两者的系统响应输出情况.图5为不同延迟时间条件下的内模PID控制系统阶跃响应输出曲线,图6 为不同延迟时间条件下的传统PID控制阶跃响应输出曲线.
当云机器人的网络曲线较小时,并不会对控制系统造成影响.但是随着控制系统延迟时间的增加,其对控制系统的负面影响逐渐显现.对比图5和图6可以发现,在不同延迟时间条件下,内模PID控制器的系统动态性能完全优于传统的PID控制器的动态性能,尤其是当系统延迟时间增大到150%时,内模PID控制器的系统依然可控,且具有良好的动态性能,而传统的PID控制器在延迟时间增大到150%时,系统就产生了发散,且不可控,动态性能完全丢失.这充分说明本文设计的内模控制方法能够有效地应用到云控制系统中,并能解决云机器人网络延时时间的无界、丢包、乱序等控制问题.
4 结语
本文研究了云机器人中的大延时时间问题,讨论了大延时时间对于不同控制系统的影响.当云机器人网络延迟时间较小时,并不会对控制系统造成影响.但是随着控制系统延迟时间的增加,其对控制系统的负面影响逐渐显现.仿真结果表明,本文所提出的内模PID控制器能够有效地解决云机器人网络时延的无界、丢包、乱序等控制问题;合理的设计过程验证了将本文所提出的内模PID控制器应用到云端控制网路系统的可行性.
猜你喜欢
煤气与热力(2021年3期)2021-06-09 06:16:22
湖南邮电职业技术学院学报(2020年3期)2020-10-13 04:40:50
交通运输系统工程与信息(2020年1期)2020-02-28 02:56:28
机电工程技术(2018年10期)2018-12-06 02:26:38
中国塑料(2016年8期)2016-06-27 06:35:02
四川电力技术(2015年5期)2015-12-19 11:04:52
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
电测与仪表(2015年21期)2015-04-09 11:52:12