
主动控制系统的动力学与控制
2019-07-16 07:21:28贾会芳
韶关学院学报 2019年6期
贾会芳
(郑州工业应用技术学院 基础教学部,河南 郑州451100)
主动控制系统作动器的作动时滞由两部分组成.第一部分为固定时滞,由在主动控制系统中的在线数据采集、滤波、数据的操作、计算机把信号传输给作动器而产生的;第二部分为浮动时滞,即控制力的累积时滞,由实时控制力达到近似稳态控制力产生的,通常依赖于作动器的特定动力学[1].对时滞微分方程的研究虽有谐波平衡法、中心流形约化、规范型和多尺度法,但都具有一定的局限性,Wahi P和Chatterjee A提出了常数时滞微分方程的Galerkin投影法[2],Nandakumar K和Wiercigroch M在此基础上进一步深化了这种方法,使Galerkin投影法同样适用于状态依赖时滞微分方程学[3].用这种方法对状态依赖时滞微分方程的研究具有以下优点:既不需要在分岔点附近,也不需要时滞项有限制形式,甚至不要求时滞量、非线性项或迫动项是小的.因此笔者应用Galerkin投影法对带有状态依赖作动时滞的主动控制系统动力学与控制进行了研究.
1 近似作动时滞的推导
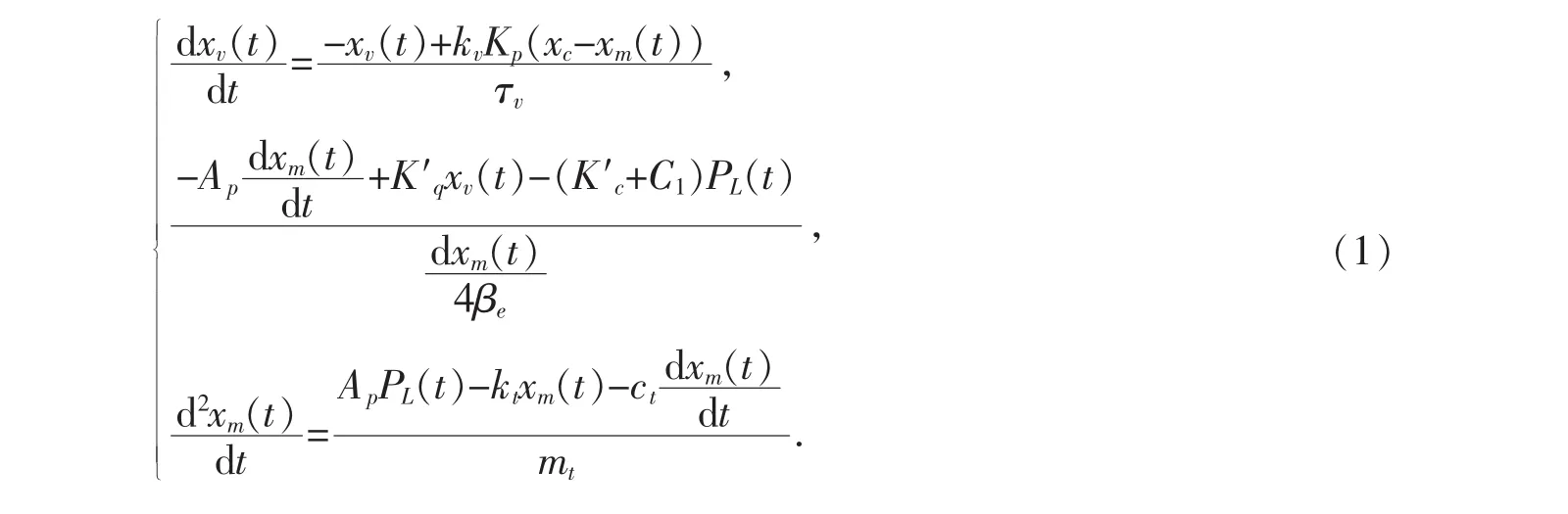
液压作动器在执行过程中把液体的压力能转变为机械能,从而控制负载的方向、速度、位移和力.由于这种设备具有高负载容纳性和精确性,因此以一种负载设备广泛应用于试验结构动力学和结构控制动力学领域[4].改进的液压作动器控制系统由式(1)常微分方程组确定:其中参数xv是滑阀位移,xm是作动器活塞位移,kv是阀增益,τv是阀时间常数,PL是压力差,K′q是阀流量增益,K′c是阀流压增益,Ap是活塞面积,C1是活塞与缸之间流体总泄漏系数,Vt是在液压缸的流体总体积,βe是体积弹性模量,xc是命令位移,Kp是比例增益,mt、ct、kt是活塞和试验样本的质量、阻尼、刚度.
主动控制系统是用来控制结构内部或外部激励的响应[5],改进的主动控制系统的数学化模型由以下方程进行描述:

其中 f(t)是外激励,并且 f(t)=βx3(t-τ(t)),x(t)是主动控制系统阀的位移,m 是质量,c、k 分别是阻尼、刚度,τ(t)是作动时滞[6].

此时,求得式(3)在零平衡点处的特征方程为:

取一组参数 Kp=3,τv=4.32*10-3,K′q=38.970i,K′c=2.53*10-6,Ap=0.86,C1=10-6,Vt=32.33,βe=95 387,mt=0.06,ct=17.45,kt=200.32[4],并把参数代入式(4),根据 Routh-Hurwitz 判据[7],可得平凡平衡点渐近稳定时 kv的取值范围,在本文中k 取2.为了求得状态依赖作动时滞,令:

解此不等式,可得时间t的最小值tmin,当t>tmin时,不等式成立,并把tmin作为浮动时滞τd.为了便于分析和计算,该不等式等价于,此时,解此不等式,可得时间 t的最大值 tmax,当 t<tmax时,不等式成立,并把 tmax作为浮动时滞 τd.又 Y1(t)的振幅为其中,

解得:t<-0.107 486*log(8.426 49*1026),其中 W1=5.398 52*1054-7.567 29*1053d0+1.879 29*.

显然,状态依赖时滞τ与初始状态滑阀位移d0之间有密切的关系,因此时滞τ是状态依赖时滞.
2 主动控制系统的动力学与控制
对式(2)应用 Galerkin 投影法[8],取级数 N=1,令 a0′(t)=s1(t),可得式(2)的低维近似系统:

对正负平衡点情况分析,固定时滞与命令位移没有合适的取值关系,无实际意义,故仅对平凡平衡点进行稳定性分析和分岔分析.
求得式(6)在平衡点E0的特征方程为:

取参数k=3.6,u=1,ε=0.01,m=9,c=-0.02,xc=10,代入(7),根据Routh-Hurwitz判据,可得平凡平衡点渐近稳定的充要条件是:

解式(8)得:
@Jamie:我女儿三岁半的时候,我小姨抱着她坐车,指着车窗外告诉她:“看,面包车。”后来过了几天,她在马路上指着一辆车坚定地告诉我小姨:“馒头车!”

(1)验证Hopf分岔的必要条件
假设 λ=±i(ω>0)是特征方程(7)的一对纯虚根,代入式(8),则 ω 满足:

对(10)进行实虚部分离:

(2)验证Hopf分岔的充分条件.


而 τf≤0 没有实际意义,因此这种情况不予考虑.
由上述计算过程可得定理1:
3 数值模拟
笔者将验证系统(2)的平凡平衡点的超临界Hopf分岔.图1中x是主动控制系统的位移,y是主动控制系统的相对速度,t是主动控制系统的作动时间.此时取一组参数k=3.6,u=1,ε=0.01,m=9,c=-0.02,xc=10,零平衡点=(0).而对应的超临界 Hopf分岔值为=4.482 26,但是 Galerkin 投影法具有一定的误差,因为N的取值会影响实际结果,因此实际的固定时滞的临界值相对与理论值来说,会发生左右偏移,实际的临界值为=4.006 271,模拟结果见图 1.

图1 式(2)的平衡点的超临界Hopf分岔图
4 结语
通过理论结果与数值模拟结果的比对,发现Galerkin投影法对具有状态依赖时滞系统的研究非常有效,根据分岔分析,在主动控制系统中的作动时滞不能被忽视,它对主动控制系统的动力学和性能有很大的影响.
猜你喜欢
中学数学(2024年9期)2024-05-20 02:04:14
数学大世界(2021年1期)2021-02-06 10:07:52
装备制造技术(2020年9期)2021-01-26 00:14:42
烟台果树(2019年1期)2019-01-28 09:34:58
传媒评论(2018年7期)2018-09-18 03:45:52
西安航空学院学报(2017年3期)2017-07-05 14:58:36
北京航空航天大学学报(2016年2期)2016-12-01 03:00:27
IT时代周刊(2015年7期)2015-11-11 05:49:56
哈尔滨师范大学自然科学学报(2015年4期)2015-09-09 09:45:30
浙江大学学报(工学版)(2015年8期)2015-03-01 01:19:26
