一种基于模型参考自适应的内模网络化控制策略
2019-07-11 03:44:26祝超群柴富强
安徽工业大学学报(自然科学版) 2019年1期
祝超群,柴富强
(1.兰州理工大学电气工程与信息工程学院,甘肃兰州730050;2.甘肃省工业过程先进控制重点实验室,甘肃兰州730050;3.兰州理工大学电气与控制工程国家级实验教学示范中心,甘肃兰州730050)
网络化控制系统(networked control system,NCS)是近年来随着控制技术、计算机网络技术及通信技术飞速发展而形成的一门综合性交叉学科。与传统控制系统采用点对点的信息无损传送方式相比,NCS可以通过数据网络或无线网络实现复杂环境下的大系统控制和远程控制,具有交互性好、减少系统布线、易于扩展和维护、增加系统的柔性和可靠性等优点。NCS一出现便受到了中外学者极大的关注,且呈方兴未艾之势[1-5]。在NCS的分析与综合过程中,不可避免地存在网络时延和模型不确定性,致使系统的性能下降甚至不稳定。因此,网络时延和模型不确定性在NCS的设计过程中必须重点考虑。
国内外学者关于NCS的研究成果比较丰厚[6-10]。为了解决NCS的随机丢包问题,Lu等[11]在状态空间模型的基础上,提出了一种改进的模型预测跟踪控制方法,获得了较好的控制性能。Zhang等[12]提出了一种基于自适应模型的事件触发控制方法,系统稳定性条件不需对被控对象参数有明确的认识,只需考虑自适应模型参数和模型不确定性的一些边界条件,可提高系统的控制性能。Incremona等[13]提出了一种基于模型的非线性网络连续时间不确定系统的事件触发控制方案,该方案综合运用模型预测和积分滑模控制技术,通过直接路径和反馈路径减少数据包的传输避免网络拥塞。Kishida等[14]提出了一种利用不同条件进行采样和控制信号更新的方法,在不确定系统预测和实际状态不匹配的情况下,减少了控制器设计的保守性。张晓蔚等[15]针对NCS中存在网络诱导时延和控制器参数摄动的问题,采用Lyapunov稳定性理论和线性矩阵不等式方法,得到闭环控制系统渐近稳定的充分条件,然后通过求解线性矩阵不等式得到控制器增益的参数表达式。张俊等[16]针对一种变时延线性NCS,采用时滞区不均分法,将时滞分割成m个区间,在每个区间构建不同的Lyapunov-Krasovskii泛函,并引入三重积分项,同时结合自由权矩阵法,在各自的时滞区间采用保守性小的积分不等式处理泛函导数,进而获得了一种新颖的NCS稳定条件。上述系统模型由于环境影响,系统模型参数是变化的,致使研究成果在实际应用中很难实现。在此基础上,针对一类存在时延和模型不确定性的内模NCS,提出一种基于模型参考自适应技术的内模网络化系统控制策略,且通过仿真验证所提策略的有效性和正确性。
1 问题描述
基于内模控制的NCS结构框图如图1。图中Gp为被控对象;Gm为内部模型;Gc为内模控制器;r*,u,y,ym分别为系统输入给定、内模控制器输出、被控对象输出和内部模型输出;分别为前向通道和反馈通道的网络时延。为设计和分析方便,将合并为τk,即令,于是得到等效的内模NCS结构图,如图2。

图1 内模NCS结构框图Fig.1 Structural block diagram of internal model NCS
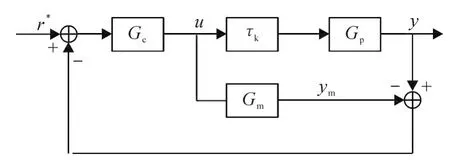
图2 等效内模NCS结构框图Fig.2 Structural block diagram of equivalent internal model NCS
由图2可得闭环系统传递函数为

根据内模控制原理,可知若Gm=Gp,则有。其中,为最小相位传递函数,f(s)为滤波器,一般滤波器f(s)取最简单的形式:,式中q取决于的阶次,α为时间常数,此时由式(1)可得

由文献[17]可知,系统存在最大时延阈值τMATD,当τk>τMATD时系统不稳定,当τk=τMATD时系统临界稳定,当τk<τMATD时系统稳定。
2 模型参考自适应内模NCS
对于实际的内模NCS,很难建立精确的数学模型,此外控制网络中还存在不同类型的网络时延,致使系统性能变差甚至不稳定,为使系统获得良好的动、静态性能,在原来的内模NCS中设计时延预测环节和以模糊控制模块为自适应机构的自适应控制器,其结构如图3。图3中:r为参考输入;ufc为模糊控制模块输出,yrm为参考模型的输出;e和ec分别为参考模型与被控对象输出的误差及其变化率。
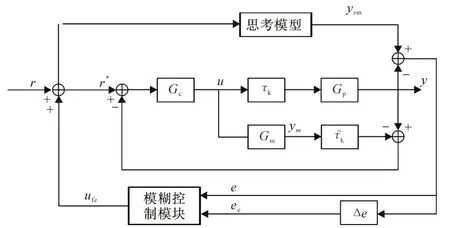
图3 模型参考自适应内模NCS结构框图Fig.3 Structure block diagram of model reference adaptive internal model NCS
2.1 模糊控制模块的设计
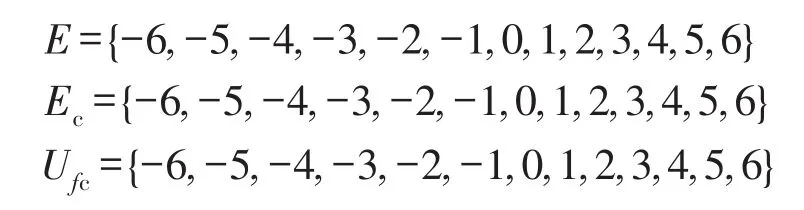
模糊控制模块根据参考模型与被控对象输出间的误差及其变化率,产生一个自适应控制信号,将其与参考输入信号相加共同作为内模控制器的给定值。模糊控制的性能决定系统对参考模型的跟随能力,设E,Ec和Ufc分别为e,ec和ufc的模糊语言变量,其模糊子集为
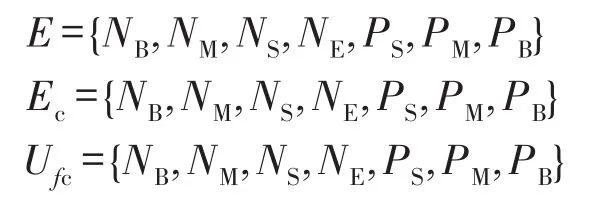
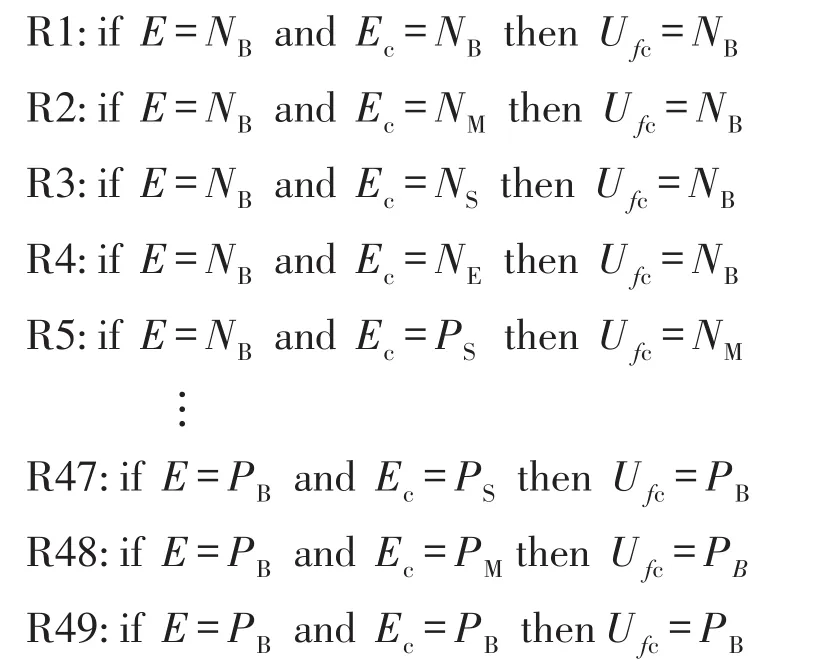
式中:NB为负大;NM为负中;NS为负小;NE为零;PSS为正小;PM为正中;PB为正大。取E,Ec和Ufc的论域均为[-6,6],即
模糊控制规则采用Mamdani推理法中的双输入单输出语句建立。由于误差E及其变化率Ec都有7个模糊子集,因而模糊推理规则共有7×7=49条:
采用三角形对称全交迭的隶属度函数对输入数据进行模糊化。由以上模糊推理规则可得模糊控制规则(表1)和模糊参数整定表(表2)。
2.2 参考模型的选择
参考模型根据给定的性能指标产生希望的输出响应,以此作为参考信号,在模糊自适应机构的作用下使系统仍具良好性能。根据自适应控制原理,参考模型响应速度越快,系统输出响应速度也越快。但在内模控制中参考模型的响应过快,易导致内模控制器饱和,影响系统性能。为获得良好的自适应性能,应在满足性能指标的前提下,使参考模型的响应速度稍慢于内模控制系统的响应速度。
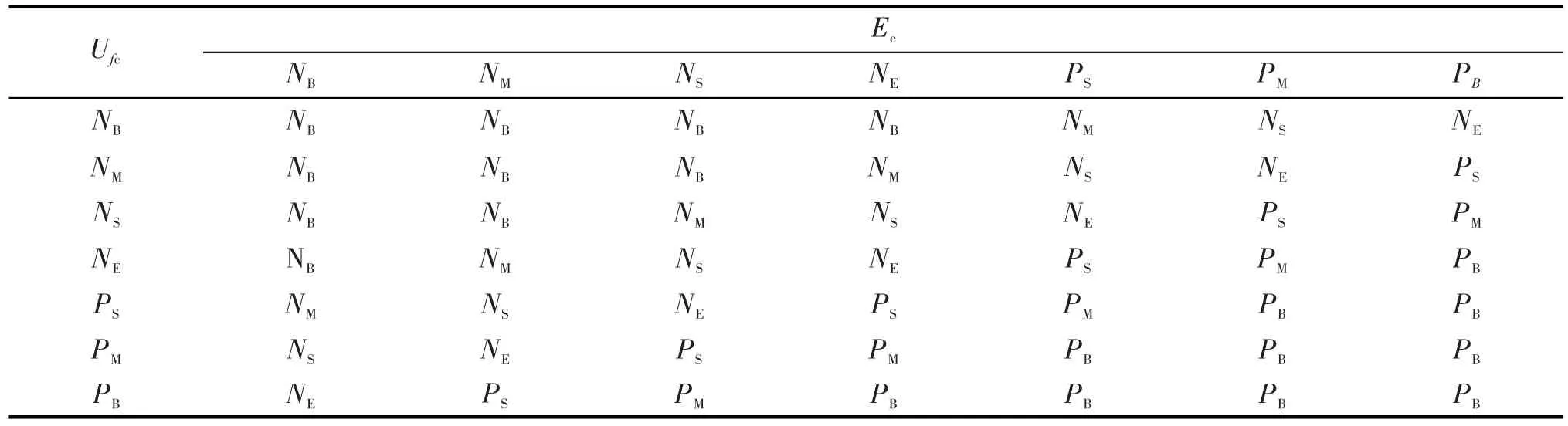
表1 模糊控制规则表Tab.1 Fuzzy control rule table
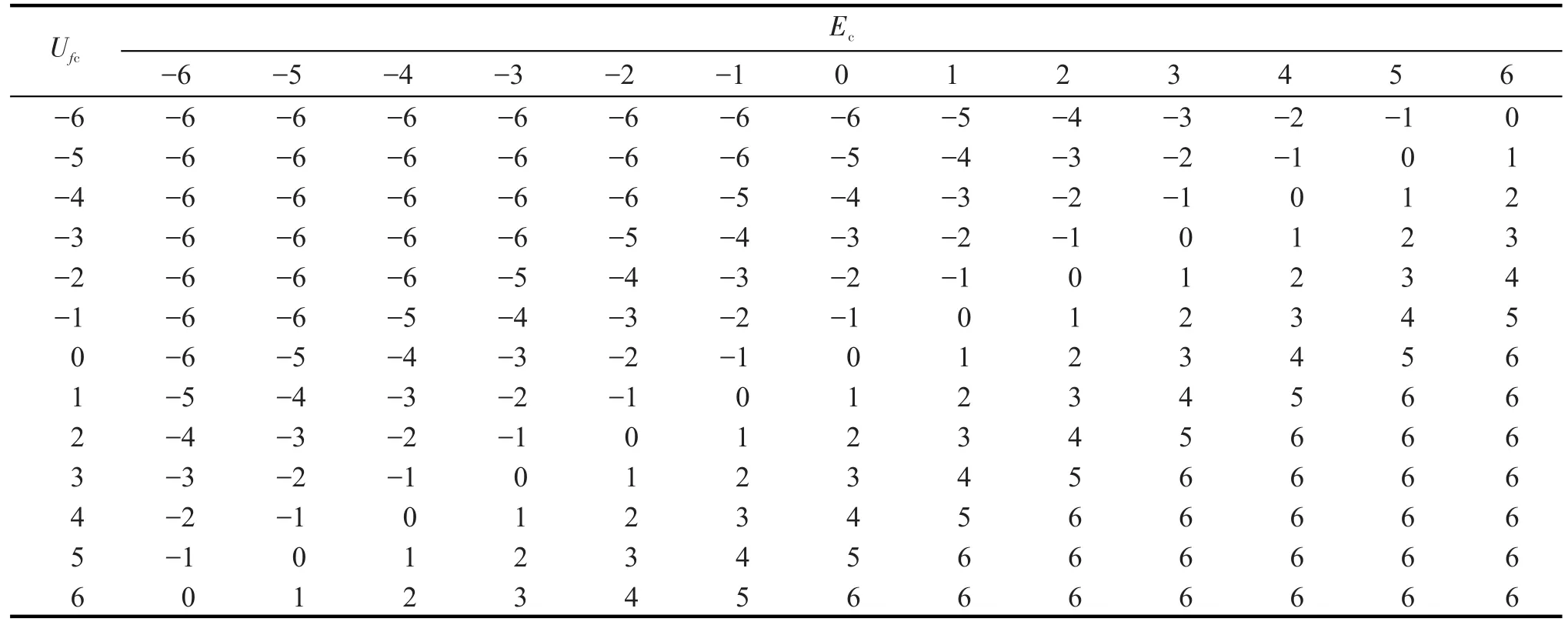
表2 模糊参数整定表Tab.2 Fuzzy parameter setting table
2.3 时延预测内模NCS稳定性分析


由式(4)可知,系统的稳定性仅与α相关,只要保证α>0,系统就稳定。在实际应用中,时延预测值很难与τk相等。但若与τk相差不大,系统响应也会近似。
3 仿真研究
为验证本文所提策略的有效性,利用仿真软件Mtalab的Simulink搭建NCS结构模型,以工业过程控制领域中最具代表性的一阶惯性加纯滞后系统和二阶系统为被控对象进行数值仿真验证。
3.1 一阶惯性加纯滞后系统仿真
假设一阶惯性加纯滞后系统被控对象的传递函数为

内部模型为

选择滤波器为

由式(6),(7)可得内模控制器为

选择参考模型为

假设系统给定为单位阶跃信号,当仅采用内模控制时,系统的输出响应如图4。从图4可看出,系统的响应曲线发散,系统不稳定。
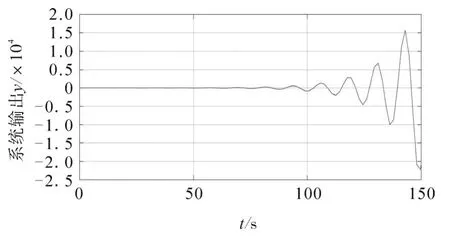
图4 内模NCS响应曲线Fig.4 Response curve of internal model NCS
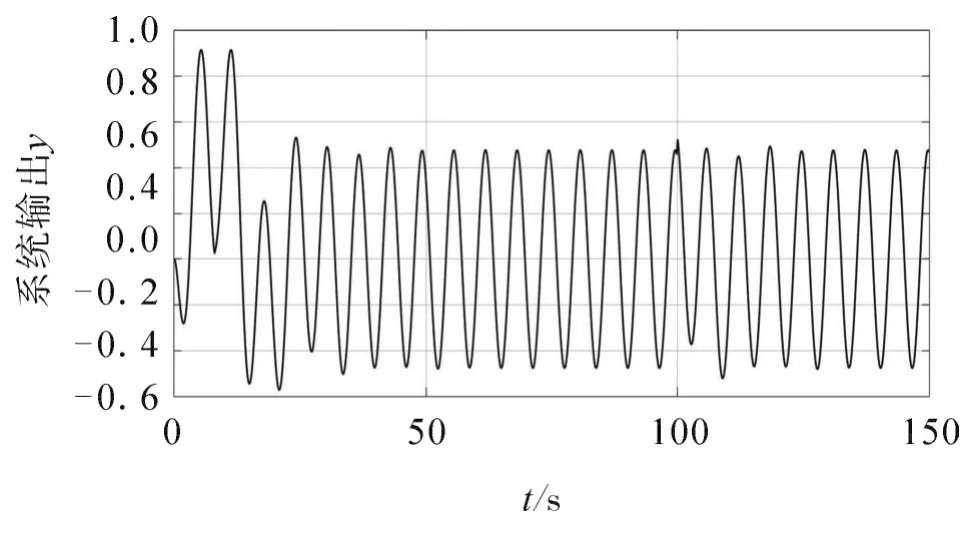
图5 一阶系统模型参考自适应时延预测内模NCS响应曲线(阶跃信号)Fig.5 First-order system model reference adaptive delay prediction internal model NCS response curve(Step signal)
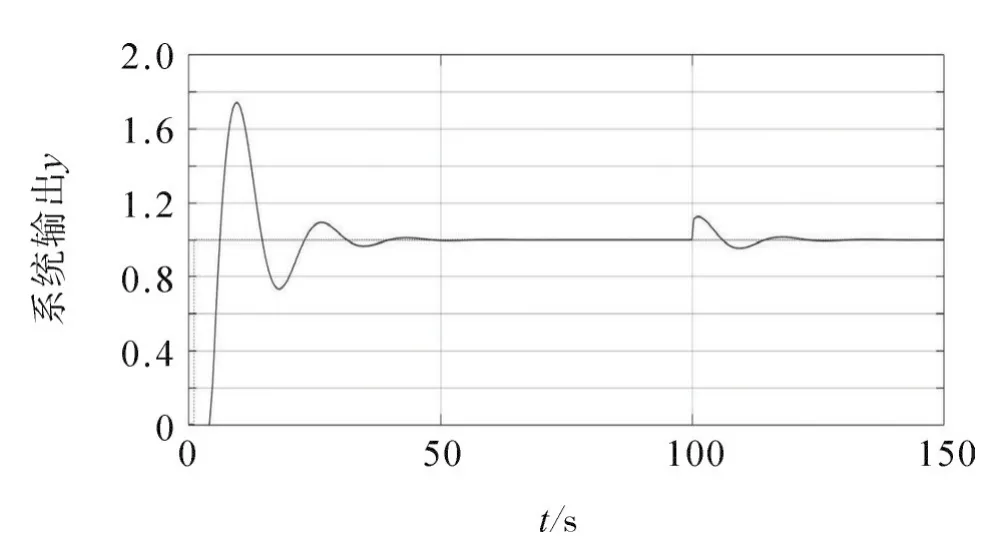
图6 一阶系统模型参考自适应时延预测内模NCS响应曲线(正弦信号)Fig.6 First-order system model reference adaptive delay prediction internal model NCS response curve(Sinusoidal)
3.2 二阶惯性加纯滞后系统仿真
二阶系统在现代工业过程控制领域的应用广泛,以二阶纯滞后系统为被控对象,采用本文提出的策略进行仿真。假设被控对象传递函数为

内部模型为

滤波器选(7),则内模控制器为

参考模型选(9),系统给定为单位阶跃信号,同时在t=100 s时加入一个幅值为0.1的阶跃干扰信号,系统输出响应曲线如图7。从图7可看出,本文提出的策略对二阶系统也具有良好的控制效果,系统在50 s后达到稳定状态,且在加100 s时加入干扰后,系统仍能短时间恢复稳定。
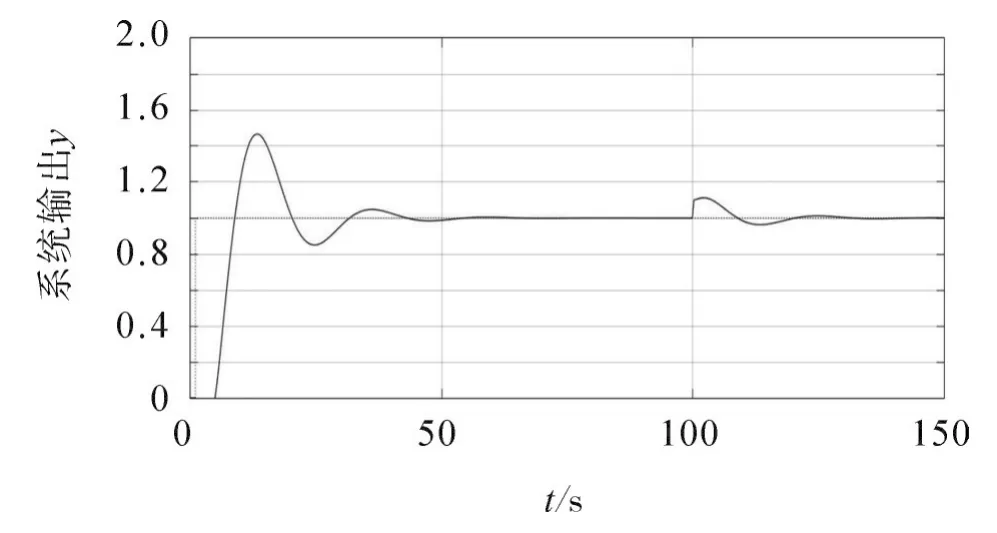
图7 二阶系统模型参考自适应时延预测内模NCS响应曲线Fig.7 Second-order system model reference adaptive delay prediction internal model NCS response curve
4 结 论
针对内模NCS中存在网络时延和模型不精确的问题提出一种基于模型参考自适应的内模网络化系统控制策略,选择内模控制器为调节器,以模糊控制模块为自适应机构,再根据时延预测法实现网络化系统控制器的设计。仿真结果表明,加入模糊逻辑自适应机构和时延预测的内模NCS输出响应轨迹实现了对系统给定信号的迅速跟踪,且可对扰动信号进行有效抑制。下一步的研究重点是针对时延、信道受限等通信约束共存的不确定NCS,开展系统稳定性分析与控制综合研究。
猜你喜欢
机电工程技术(2018年10期)2018-12-06 02:26:38
军事运筹与系统工程(2016年3期)2016-09-26 11:41:04
电脑知识与技术(2016年10期)2016-06-16 19:27:57
四川电力技术(2015年5期)2015-12-19 11:04:52
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
电测与仪表(2015年21期)2015-04-09 11:52:12
锻压装备与制造技术(2013年1期)2013-06-29 02:26:28
重庆理工大学学报(自然科学)(2012年5期)2012-07-06 02:02:38